Наука и Образование
МГТУ им. Н.Э. Баумана
Наука и Образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2016. № 06. С. 97-115.
1Э5М 1994-040В
Б01: 10.7463/0616.0842109
Представлена в редакцию: Исправлена:
© МГТУ им. Н.Э. Баумана
09.05.2016 23.05.2016
УДК 629.78
Анализ ошибок наведения межпланетного космического аппарата
СуХОВа С. В.1′ Б.БикЬоуа 9 0 @ атзД.с от
:МГТУ им. Н.Э. Баумана, Москва, Россия
В работе представлен анализ ошибок наведения космического аппарата при прямом межпла -нетном перелете (без гравитационных маневров). Расчет выполнен с применением метода Монте-Карло и матричного метода Дэнби (матрицанта кеплерова движения). Представлены теоретические основы расчета и подробно описана методика его выполнения. Для примера выполнен анализ ошибок наведения для полета к Марсу и Венере. Определены величины им -пульсов скорости, необходимых для коррекции ошибок выведения КА на отлетную орбиту и погрешностей выполнения предшествующих маневров. Вычислены параметры эллипсов дисперсии ошибки положения аппарата при входе в сферу действия планеты и величины необхо -димого запаса импульса для различных значений вероятностей. Примененный алгоритм может быть использован для предварительного анализа ошибок наведения и оценки запаса импульса для промежуточных коррекций.
Ключевые слова: анализ ошибок наведения, межпланетный перелет, матрицант кеплерова движения, метод Монте-Карло
Введение
В данной работе рассматривается анализ влияния ошибок выведения космического аппарата (КА) на отлетную гиперболическую орбиту и неточности выполнения промежуточных маневров на запас импульса скорости, необходимый для коррекции межпланетной траектории перелета, и ошибку положения аппарата на финальном этапе полета.
Ошибка выведения КА зависит от параметров системы управления ракеты-носителя
(РН) и разгонного блока (РБ), а также от траектории выведения, и моделируется ковариационной матрицей вектора состояния КА в момент прекращения активного участка полета (момент выключения двигателя РБ). Неточность выполнения маневра моделируется ковариационной матрицей приложенного вектора скорости и зависит от параметров двигательной установки КА.
Анализ выполняется при помощи моделирования погрешностей выведения и ошибок вектора коррекции методом Монте-Карло. Связь между отклонениями вектора со-
стояния КА в различных точках траектории определяется посредством матричного метода Дэнби. Результаты моделирования позволяют оценить ошибку положения КА в момент его входа в сферу действия планеты-цели и необходимый запас импульса скорости. Для примера рассматривается анализ полетов к Венере в 2022 году и к Марсу в 2026 году.
1. Постановка задачи
Целью данной работы является анализ ошибок наведения космического аппарата при прямом межпланетном перелете (без выполнения промежуточных гравитационных маневров), а также определение запаса импульса, необходимого для выполнения промежуточных коррекций.
Задача рассматривается в следующей постановке:
— опорная (номинальная) траектория межпланетного перелета рассчитывается с использованием модели сопряженных конических сечений и средних элементов орбит планет, относящиеся к средним эклиптике и равноденствию эпохи 12000 [1];
— на этапе полета в сфере действия Земли выполняется коррекция ошибки выведения КА ракетой-носителем (ошибки скорости); маневр проводится через несколько дней после старта, когда получено достаточное количество данных о фактической траектории КА;
— ошибка положения КА на околоземном участке полета пренебрежительно мала по сравнению с гелиоцентрическими расстояниями;
— ошибка времени полета КА на околоземном участке полета пренебрежительно мала по сравнению с общим временем полета;
— на этапе полета в сфере действия Солнца выполняется двухимпульсная коррекция параметров орбиты, исправляющая ошибки положения и времени перелета, а также ошибки выполнения предшествующего маневра; время выполнения коррекции выбирается таким образом, чтобы величина маневра была минимальной;
— все корректирующие маневры предполагаются импульсными, то есть изменение вектора скорости КА происходит мгновенно и без изменения его положения в пространстве;
— все корректирующие маневры полагаются неидеальными, то есть фактически выполненный маневр отличается от номинального маневра, скомандованного системой управления.
2. Теоретические основы расчета
Как было указано выше, для проведения анализа применяется моделирование методом Монте-Карло и матричный метод Дэнби, основанный на применении линейной теории возмущений и дифференциальных коррекций [2], [3]. Приведем краткое описание метода Дэнби.
Пусть ^ =
№ 1 8г2
1 , 5*2 =
№1 _ 8Уг _
отклонения вектора состояния КА от номинального
значения в некоторые моменты времени ^ и Х2 , соответственно. Можно записать соотношение
№ = (1) где П(Х2, ^) — матрицант кеплерова движения размером 6*6, который можно записать в виде
П(*2, О =
Ь(^2,О мо О 0(^2, О
(2)
где Ь(Х2, ^), М(Х2, ^) , Р(Х2, ^) и 0(Х2, ^) — матрицы размером 3*3, элементы которых зависят от параметров номинальной траектории перелета. Для упрощения вычисления элементов матрицанта, выражение (2) можно представить в виде
О = <р , О = ‘р Ж^, Хр Г
П(*2, О =
Ь(^2,Хр) мгр)» Р&,хр) 0(^2,гр)
04^0 -мх(^1, О
(3)
_-Р 4^, гр) хр)
где X — время пролета перицентра орбиты. Формулы для вычисления компонентов матрицанта представлены в источниках [2], [3].
Матрицант кеплерова движения обладает следующим свойством
, ) = Щп, г„-1)0(г„-1, г„-2)…0(гг+2, ^П^, X,) (4)
где П(Хп, Хп_^ — матрицант, относящийся к движению по первому участку номинальной
траектории, П(Хп 1з Хп_ 2) — ко второму, и т.д. Условием выполнения равенства (4) является
задание параметров участков траектории в одних и тех же осях координат (в осях неподвижной орбитальной системы координат), хотя исходные точки могут быть различными для разных участков траектории перелета.
Для определения величины корректирующего маневра, исправляющего погрешность выведения КА на отлетную гиперболическую орбиту (ошибку скорости и времени полета), воспользуемся работой [4]. Необходимый корректирующий импульс в момент времени X
АУ2 = с(X2,
(5)
где С(Х2,^) = [А(Х2,^) В(Х2,^)] — матрица чувствительности коррекции размером 3*6 компоненты которой можно вычислить следующим образом
Л&, О = Р(Г2, гр гр) — гр )РТ(^, гр) О = о(*2, г )ЬТ(^ гр) — г )мт(^, гр)
где Ь , М, Р и О — составляющие матрицанта (см. (2)).
Ковариационная матрица ожидаемого значения коррекционного маневра [5]
«С 0 0»
N =
0 В 0 0 0 В
— 2
С = — (АV2 + а2м)(1 + е~2ав) — АV2е’а
(7)
В = — ^2 )(1 — е-2**)
0 2 где ам — дисперсия величины номинального маневра, ав — дисперсия угла наклона вектора фактического маневра к направлению приложения номинального импульса.
Ковариационную матрицу ошибок наведения в картинной плоскости планеты-цели можно представить в виде [6]
С =
Скт
рктакат _2
(8)
Рктакат
где *2 — дисперсия ошибки по оси Я картинной плоскости, а2 — дисперсия ошибки по оси Т картинной плоскости, рш — коэффициент корреляции между ак и ат . Матрицу перехода между неподвижной орбитальной системой координат и картинной плоскостью планеты-цели можно вычислить при помощи источников [6] или [7]. Так как распределение ошибок наведения в картинной плоскости можно считать двумерным нормальным, по полученной ковариационной матрице определяют контуры постоянной плотности вероятности, для данного распределения являющиеся эллипсами. Полуоси эллипса дисперсии, а также угол поворота эллипса можно вычислить по формулам [8]
а = N
а , 22 а ат
2 ‘V V 2 У
1
«V
+ {рКта*т )2
Ь = N
_2 . 2
ак +ат
22 а-а
1
+ (рятаяат )2
(9)
в = — агйаи 2
{ 2 Ркта*тЛ
_2 _ 2
V ат °Я У
где а — большая полуось эллипса дисперсии, Ь — малая полуось, в — угол наклона оси эллипса, отсчитываемый от оси Т по часовой стрелке, а N — коэффициент, связанный с вероятностью р попадания ошибки положения КА в определенный эллипс
р (N0-) = 1 — е 2 (10)
3. Методика расчета
Анализ ошибок наведения выполняется согласно следующему алгоритму:
1. Для номинальной гиперболической траектории отлета вычисляют матрицант гиперболического участка траектории ПЛ (Хс1, .) по формуле (3) и матрицу чувствительности 0(Хс1, ^ .) по формулам (6), где ^ . — момент начала пассивного участка траектории (время прекращения работы двигателя разгонного блока), — момент выполнения первого корректирующего маневра.
2. При помощи номинального значения вектора %г. . состояния КА в момент начала
пассивного участка траектории и ковариационной матрицы ошибок выведения КА ракетой-носителем генерируют случайные значения отклонения вектора состояния
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
8% .
Щ
3. Для имеющегося значения вектора 8%^ по формуле (1) определяют отклонение вектора состояния 8%с1, а по формуле (5) вычисляют номинальную величину необходимого корректирующего маневра ДУ1п
4. Для номинального маневра ДУ1и посредством ковариационной матрицы из уравнения (7) генерируют случайные значения фактической величины первого маневра ДУа .
5. Варируя моменты выполнения двухимпульсной коррекции на гелиоцентрическом участке траектории, вычисляют фактический вектор состояния в момент Хс21 приложения первого импульса второй коррекции по формуле
%с 21а = %с21п + 8%с21
где %с21и — номинальное значение вектора состояния в момент времени Хс21, а 8вс21 -ошибка вектора состояния в момент Хс21, определяемая по формуле
8%с21 = > 1с№е1 (tc21, )8*с1
где — момент выхода КА из сферы действия Земли, — момент приложения
первого импульса второй коррекции, 8%с1 =
8гс1
— погрешность вектора
_8Ус1 -ДУ1а
состояния после выполнения первого маневра. Матрицант Пй ) вычисляют
N
для номинальной гиперболической околоземной орбиты, матрицант (¿с21з -для гелиоцентрического эллиптического участка номинальной траектории.
6. Используя фактический вектор состояния 8с21а и номинальный вектор состояния 8с22и в момент времени второго импульса ?с22, а также величину промежутка времени между импульсами второй коррекции &с2 = ¿с22 — ¿с21, решают задачу Ламберта и определяют параметры переходной орбиты и величины необходимых импульсов коррекции АУ21и и АУ22п. Из множества полученных корректирующих маневров выбирают маневр с минимальными затратами импульса.
7. Аналогично п. 4, для выбранного корректирующего маневра вычисляют ковариационные матрицы и генерируют случайные значения фактических величин импульсов коррекции АУ и АУ .
8. Ошибку вектора состояния $8 . на входе в сферу действия планеты-цели с учетом выполненных коррекций определяют по формулам
0
3*с21 =
АУ21„ -АУ21а.
=
= ^еН (¡022, 7021)^с21
8т
с 22
¿Ус22 ‘ (АУ22« -АУ22а )
3рк = ПеI , 7с22)$*с22
где — ошибка вектора состояния КА на переходной орбите непосредственно
после приложения первого импульса коррекции, 38с22 — ошибка вектора состояния в момент приложения второго импульса коррекции, (¿с22, ¿с2 ^ — матрицант переходной орбиты, параметры которой определяют в п. 6, двс22 — ошибка вектора состояния непосредственно после приложения второго импульса коррекции, 7 -момент входа в сферу действия планеты-цели.
9. По полученному множеству значений АУ1и, АУ21и и АУ22п определяют запас импульса, необходимый для выполнения коррекций траектории, а множество значений позволяет оценить ошибки наведения КА на этапе подлета к планете-цели. Для корректирующих маневров определяют математические ожидания и дисперсии величин импульсов, а в результате обработки множества значений $8 .
определяют ковариационную матрицу ошибок наведения на входе в сферу действия планеты-цели в картинной плоскости и контуры постоянной плотности распределения по формулам (8), (9) и (10).
4. Результаты
Выполним анализ ошибок наведения для двух траекторий: траектории полета к Марсу в 2022 году и траектории перелета к Венере в 2026 году. Для наглядности, каждый перелет рассмотрим в двух вариантах:
— перелет с коррекцией ошибки выведения на этапе полета в сфере действия Земли;
— перелет с коррекцией ошибки выведения на этапе полета в сфере действия Земли и двухимпульсной коррекцией на гелиоцентрическом этапе полета.
Для каждой траектории рассмотрим пуск посредством двух различных ракет-носителей, обеспечивающих различные погрешности выведения. Ковариационные матрицы ошибок выведения взяты из источника [9] для двух пар РН/РБ: «Атлас»/«Центавр» (Atlas/Centaur) и «Тор»/«Дельта» (Thor/Delta). Выбор данных ракет-носителей обусловлен доступностью необходимых для расчета данных и наглядностью получаемых результатов (величины ошибки при выведении системой «Тор»/«Дельта», как правило, выше, чем при пуске системой «Атлас»/«Центавр»). При наличии необходимых данных о траектории выведения и структуре системы управления ковариационная матрица ошибок выведения может быть вычислена для любых РН и РБ по методике, представленной в источнике [4].
Метод Монте-Карло применяется согласно рекомендациям источника [10]. Значения ам и ав для вычисления ковариационных матриц корректирующих маневров приняты
равными 0,01-А^и и 0,02 рад, соответственно.
4.1. Перелет к Венере
Анализ ошибок наведения и определение величин необходимых корректирующих маневров проведен для номинальной траектории перелета к Венере с характеристиками, представленными в табл. 1.
Результаты расчета для перелета с одной коррекцией представлены в табл. 2, 3 и на рис. 1-4. В табл. 2 представлены значения величин корректирующих импульсов для разных вероятностей успешного выполнения маневра, в табл. 3 приведены параметры эллипсов дисперсии для разных значений вероятности попадания область. На рис. 1 показан 4о эллипс дисперсии ошибки положения КА в картинной плоскости в случае выведения РН «Атлас». На рис. 2 представлено увеличенное изображение эллипсов дисперсии (1о, 2о, 3о, 4о в порядке увеличения), а точки показывают частные случаи значения ошибки положения КА в картинной плоскости, полученные в результате моделирования методом Монте-Карло. Результаты для случая выведения РН «Тор» представлены на рис. 3,4 аналогичным образом. Результаты расчета для варианта с двумя коррекциями представлены в табл. 4,5 и на рис. 5, 6.
Таблица 1. Характеристики траектории перелета к Венере
Дата старта 31.07.2026
Время перелета, сут. 149,3
Характеристическая энергия пуска, км2/с2 7,3
Параметры траектории Геоцентрическая гиперболическая траектория Гелиоцентрическая эллиптическая траектория
Большая полуось, км 54 403 127 816 260
Эксцентриситет 1,1208 0,1550
Наклонение, ° 72,7 1,2
Долгота восходящего узла, ° 225,2 128,3
Аргумент перицентра, ° 21,4 6,8
Таблица 2. Величина первого корректирующего маневра
РН /РБ
«Атлас»/«Центавр» (А/Ц) «Тор»/«Дельта» (Т/Д)
Математическое ожидание величины маневра, м^ 2,9 28,4
Дисперсия величины маневра, м2/^ 4,7 216,9
Вероятность успешного выполнения маневра Необходимый запас импульса, м/с
68,27% (1с) 5,1 43,1
95,45% (2с) 7,2 57,9
99,73% (3с) 9,4 72,6
99,99% (4с) 11,6 87,3
Таблица 3. Параметры эллипсов дисперсии ошибки положения КА в случае одной коррекции
Вероятность попадания в область, ограниченную эллипсом РН /РБ
«Атлас»/«Центавр» «Тор»/ «Дельта»
Большая полуось, км Малая полуось, км Большая полуось, км Малая полуось, км
39,35% (1с) 50 000 2 800 450 000 45 000
86,47% (2с) 100 000 5 600 900 000 90 000
98,89% (3 с) 150 000 8 400 1 350 000 135 000
99,97% (4с) 200 000 11 200 1 800 000 180 000
Угол поворота, ° 43 Угол поворота, ° 43
Рис. 1. 4с эллипс дисперсии ошибки положения КА в случае одной коррекции (А/Ц)
Рис. 2. Эллипсы дисперсии ошибки положения КА в случае одной коррекции (А/Ц, увеличено)
-1000
-500
500
1000
1500
1 1 ч ч i i
ч Ч
ч ч \
ч
ч
i i 1 1
-1500 -1000 -500 0 500
Т, ЮеЗ км
1000
1500
Рис. 3. 4с эллипс дисперсии ошибки положения КА в случае одной коррекции (Т/Д)
Рис. 4. Эллипсы дисперсии ошибки положения КА в случае одной коррекции (Т/Д, увеличено)
Таблица 4. Величина второго корректирующего маневра
РН /РБ
«Атлас»/«Центавр» «Тор»/«Дельта»
Математическое ожидание величины маневра, м/с 0,3 8,8
Дисперсия величины маневра, м2/с2 0,056 52,5
Вероятность успешного выполнения маневра Необходимый запас импульса, м/с
68,27% (1с) 0,5 16,0
95,45% (2с) 0,8 23,3
99,73% (3с) 1,0 30,6
99,99% (4с) 1,2 37,8
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Таблица 5. Параметры эллипсов дисперсии ошибки положения КА в случае двух коррекций
Вероятность попадания в область, ограниченную эллипсом РН /РБ
«Атлас»/«Центавр» «Тор»/«Дельт а»
Большая полуось, км Малая полуось, км Большая полуось, км Малая полуось, км
39,35% (1с) 5,0 2,7 103 63
86,47% (2с) 10,0 5,4 206 126
98,89% (3 с) 15,0 8,1 309 189
99,97% (4с) 20,0 10,8 412 152
Угол поворота, ° 107 Угол поворота, ° 96
т-—:———гт—г
_._I_._1—1_I_I_I_
-20 -10 0 10 20
Т, км
Рис. 5. Эллипсы дисперсии ошибки положения КА в случае двух коррекций (А/Ц)
-400 -200 0 200 400
Т, км
Рис. 6. Эллипсы дисперсии ошибки положения КА в случае двух коррекций (Т/Д)
4.2. Перелет к Марсу
Характеристики номинальной траектории перелета к Марсу представлены в табл. 6. Результаты расчета для перелета с одной коррекцией представлены в табл. 7, 8 и на рис. 7, 8. Результаты расчета для варианта с двумя коррекциями представлены в табл. 9, 10 и на рис. 9, 10.
Таблица 6. Характеристики траектории перелета к Марсу
Дата старта 27.08.2022
Время перелета, сут. 215,7
Характеристическая энергия пуска, км2/с2 10,6
Параметры траектории Геоцентрическая гиперболическая траектория Гелиоцентрическая эллиптическая траектория
Большая полуось, км 37 777 191 143 535
Эксцентриситет 1,1741 0,2260
Наклонение, ° 72,7 1,9
Долгота восходящего узла, ° 239,0 335,3
Аргумент перицентра, ° 31,9 351,8
Таблица 7. Величина первого корректирующего маневра
РН /РБ
«Атлас»/«Центавр» «Тор»/«Дельта»
Математическое ожидание величины маневра, м/с 2,6 25,4
Дисперсия величины маневра, м2/с2 4,1 162,2
Вероятность успешного выполнения маневра Необходимый запас импульса, м/с
68,27% (1с) 4,6 38,1
95,45% (2с) 6,7 50,9
99,73% (3с) 8,7 63,6
99,99% (4с) 10,7 76,4
Таблица 8. Параметры эллипсов дисперсии ошибки положения КА в случае одной коррекции
Вероятность попадания в область, ограниченную эллипсом РН /РБ
«Атлас»/«Центавр» «Тор»/«Дельт а»
Большая полуось, км Малая полуось, км Большая полуось, км Малая полуось, км
39,35% (1с) 35 000 450 330 000 5600
86,47% (2с) 70 000 900 660 000 11 200
98,89% (3 с) 105 000 1 350 990 000 16 800
99,97% (4с) 140 000 1 800 1 320 000 22 400
Угол поворота, ° 72 Угол поворота, ° 72
60 -40 -20 0 20 40 60 -б -4 -2 0 2 4 6
Т, 10еЗ км Т, ШеЗ км
Рис.7. Эллипсы дисперсии ошибки положения КА в случае одной коррекции (А/Ц)
Рис.8. Эллипсы дисперсии ошибки положения КА в случае одной коррекции (Т/Д) Таблица 9. Величина второго корректирующего маневра
РН /РБ
«Атлас»/«Центавр» «Тор»/«Дельта»
Математическое ожидание величины маневра, м/с 0,06 2,7
Дисперсия величины маневра, м2/с2 0,0042 4,4
Вероятность успешного выполнения маневра Необходимый запас импульса, м/с
68,27% (1с) 0,13 4,8
95,45% (2с) 0,19 6,9
99,73% (3с) 0,26 8,9
99,99% (4с) 0,32 11,1
Таблица 10. Параметры эллипсов дисперсии ошибки положения КА в случае двух коррекций
Вероятность попадания в область, ограниченную эллипсом РН /РБ
«Атлас»/«Центавр» «Тор»/«Дельт а»
Большая полуось, км Малая полуось, км Большая полуось, км Малая полуось, км
39,35% (1с) 1,9 1,1 44 23
86,47% (2с) 3,8 2,2 88 46
98,89% (3 с) 5,7 3,3 132 69
99,97% (4с) 7,6 4,4 220 92
Угол поворота, ° 77 Угол поворота, ° 74
Рис. 9. Эллипсы дисперсии ошибки положения КА в случае двух коррекций (А/Ц)
Рис. 10. Эллипсы дисперсии ошибки положения КА в случае двух коррекций (Т/Д)
Заключение
Полученные результаты демонстрируют, как при помощи представленного алгоритма возможно на ранних этапах проектирования межпланетных миссий оценить необходимый запас импульса для выполнения промежуточных коррекций и ошибку положения космического аппарата на финальном этапе полета. Также наглядно показана зависимость величин промежуточных коррекций от выбора ракеты-носителя и разгонного блока.
В данном анализе учитывались только ошибки выведения КА и погрешности выполнения корректирующих маневров, но матричный метод Дэнби позволяет учитывать воздействие различных сил на отклонение фактической траектории от номинальной. При необходимости возможна доработка алгоритма для учета дополнительных факторов и повышения точности оценки.
Список литературы
1. Keplerian elements for approximate positions of the major planets. Jet Propulsion Laboratory (JPL). Режим доступа: http://ssd.ipl.nasa.gov/7planet_pos (дата обращения 12.06.2016).
2. Danby J.M.A. Matrix methods in the calculation and analysis of orbits // AIAA Jour-nal.1964. Vol. 2. no. 1. P. 13-16.
3. Danby J.M.A. The Matrizant of Keplerian Motion // AIAA Journal. 1964. Vol. 2. no. 1. P. 16-19.
4. Teren F., Cole G.L. Analytical calculation of partial derivatives relating lunar and planetary midcourse correction requirements to guidance system injection errors // NASA Technical Reports Server (NTRS). Режим доступа:
http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19680010899.pdf (дата обращения: 02.02.2016). 41 p.
5. Chioma V.C., Titu N.A. Expected maneuver and maneuver covariance model // Journal of Spacecraft and Rockets. 2008. Vol. 45. no. 2. P. 409-412.
6. Jah M. Derivation of the B-plane (body plane) and its associated parameters. Режим доступа: http://cbboff.org/UCBoulderCourse/documents/b-plane.PDF (дата обращения: 12.06.2016).
7. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космического полета: учеб. пособие. М.: Наука, 1990. 448 с.
8. Soong T. T. Preflight analysis of target errors of a space trajectory // Journal of Spacecraft and Rockets. 1966. Vol. 3. no. 1. P. 139-141.
9. Systems design study of the Pioneer Venus spacecraft. Final study report. Volume1. Technical analyses and tradeoffs sections 1-4 (Part 1 of 4) // NASA Technical Reports Server (NTRS). Режим доступа:
http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19740024191.pdf (дата обращения: 12.06.2016). 460 p.
10. Hanson J.M., Beard B.B. Applying Monte Carlo simulation to launch vehicle design and requirements analysis // NASA Technical Reports Server (NTRS). Режим доступа: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20100038453.pdf (дата обращения: 12.06.2016). 134 p.
Science ¿Education
of the Baumail MSTU
Science and Education of the Bauman MSTU, 2016, no. 06, pp. 97-115.
DOI: 10.7463/0616.0842109
Received: 09.05.2016
Revised: 23.05.2016
© Bauman Moscow State Technical Unversity
Analysing Interplanetary Probe Guidance Accuracy
S.V. Sukhova1*
s.sukhova 9 Q’g gmail.com :Bauman Moscow State Technical University, Moscow, Russia
Keywords: guidance accuracy analysis, interplanetary flight, matrizant of keplerian motion, Monte
Carlo method
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
The paper presents a guidance accuracy analysis and estimates delta-v budget required to provide the trajectory correction maneuvers for direct interplanetary flights (without midcourse gravity assists). The analysis takes into consideration the orbital hyperbolic injection errors (depend on a selected launch vehicle and ascent trajectory) and the uncertainties of midcourse correction maneuvers.
The calculation algorithm is based on Monte Carlo simulation and Danby’s matrix methods (the matrizant of keplerian motion). Danby’s method establishes a link between the errors of the spacecraft state vectors at different flight times using the reference keplerian orbit matrizant. Utilizing the nominal trajectory parameters and the covariance matrix of launch vehicle injection errors the random perturbed orbits are generated and required velocity corrections are calculated. The next step is to simulate midcourse maneuver performance uncertainty using the midcourse maneuver covariance matrix. The obtained trajectory correction impulses and spacecraft position errors are statistically processed to compute required delta-v budget and dispersions ellipse parameters for different prediction intervals.
As an example, a guidance accuracy analysis has been conducted for a 2022 mission to Mars and a Venus mission in 2026. The paper considers one and two midcourse correction options, as well as utilization of two different launch vehicles.
The presented algorithm based on Monte Carlo simulation and Danby’s methods provides preliminary evaluation for midcourse corrections delta-v budget and spacecraft position error. The only data required for this guidance accuracy analysis are a reference keplerian trajectory and a covariance matrix of the injection errors. Danby’s matrix method allows us to take into account also the other factors affecting the trajectory thereby increasing the accuracy of analysis.
References
1. Keplerian elements for approximate positions of the major planets. Jet Propulsion Laboratory (JPL). Available at: http://ssd.jpl.nasa.gov/7planet pos, accessed: 12.06.2016.
2. Danby J.M.A. Matrix methods in the calculation and analysis of orbits. AIAA Journal, 1964, Vol. 2, no. 1. pp. 13-16.
3. Danby J.M.A. The Matrizant of Keplerian Motion. AIAA Journal, 1964, Vol. 2, no. 1. pp. 1619.
4. Cole G.L., Teren F. Analytical calculation of partial derivatives relating lunar and planetary midcourse correction requirements to guidance system injection errors. NASA Technical Reports Server (NTRS). 41 p. Available at:
http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19680010899.pdf, accessed 02.02.2016.
5. Chioma V.C., Titu N.A. Expected maneuver and maneuver covariance model. Journal of Spacecraft and Rockets, 2008, Vol. 45, no. 2. pp. 409-412.
6. Jah M. Derivation of the B-plane (body plane) and its associated parameters. Available at: http://cbboff.org/UCBoulderCourse/documents/b-plane.PDF, accessed 12.06.2016.
7. Okhotsimsky D.E., Sikharulidze Yu.G. Osnovy mehaniki kosmicheskogo poleta: ucheb. Posobie [The Basics of Space Flight Mechanics: textbook]. Moscow, Science Publ., 1990. 448 p. (in Russian).
8. Soong T. T. Preflight analysis of target errors of a space trajectory. Journal of Spacecraft and Rockets, 1966, Vol. 3, no. 1, pp. 139-141.
9. Systems design study of the Pioneer Venus spacecraft. Final study report. Volume1. Technical analyses and tradeoffs sections 1-4 (Part 1 of 4). NASA Technical Reports Server (NTRS). 460 p. Available at: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19740024191.pdf, accessed 12.06.2016.
10. Beard B.B., Hanson J.M. Applying Monte Carlo simulation to launch vehicle design and requirements analysis. NASA Technical Reports Server (NTRS). 134 p. Available at: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20100038453.pdf, accessed 12.06.2016.
МЕТОДЫ НАВЕДЕНИЯ КАПРИ ВЫПОЛНЕНИИ КОРРЕКТИРУЮЩЕГО МАНЕВРАСодержание лекций:1. Постановка задачи о коррекции траектории2. Классификация различных способов коррекции3. Выбор корректируемых параметров4. Определение области рассеивания в пространстве корректируемых параметров5. Математические основы двухпараметрической коррекции6. Связанные коррекции7. Изохронные производные8. Трёхпараметрическая коррекция1. Постановка задачи о коррекции траекторииПри полётах к планетам действительная траектория после выведения КАвсегда отличается от расчётной (номинальной). Это объясняется тем, что какпри выведении, так и в свободном полёте на КА действуют возмущающие силы, оцениваемые, как правило, максимальными величинами.Такими возмущениями могут быть отклонения, возникающие в концеучастка выведения из-за ошибок:- в системе управления;- неточного определения астрономических констант и полей тяготенияпланет, вследствие аномалий гравитационных полей;- влияние внешних возмущений, не учтённых в основных уравнениях,например, воздействие давления солнечного света;- работы двигателей системы управления (СУ) и системы ориентации(СО).Следовательно, для выполнения поставленной перед КА задачи возникаетнеобходимость коррекции (исправления) его траектории.
Коррекция можетпроводиться в реальном полёте только после того, как в результате обработкиизмерений с достаточной степенью точности будет определена наземными илиавтономными навигационными средствами действительная траектория движения.Под системой коррекции понимается совокупность средств, обеспечивающих выполнение коррекции. Эта совокупность включает:- двигательная установка (ДУ) с запасом топлива;- средства ориентации в пространстве;- средства управления ДУ при его работе.При проектировании КА и разработке основных требований к системекоррекции в первую очередь исследуются следующие вопросы.1. Определяются величины потребных корректирующих импульсов скорости, от которых зависят в свою очередь запасы топлива (топливо, как правило, составляет основную массу всей системы коррекции), при этом выявляютсяоптимальные способы проведения коррекций и время коррекций.2.
Изучаются схемы ориентации при выполнении коррекции, определяются наиболее подходящие для ориентации светила, определяется набор звёздных и планетных датчиков.3. Рассматриваются возможности системы измерений и прогноза траекторий или автономных средств навигации.4. Изучается влияние ошибок при исполнении коррекции на окончательные результаты.5. Рассматриваются требования к ДУ и её СУ: время работы ДУ, её тяга,импульсы последействия, число необходимых включений и т.п.6. Исследуются стратегии проведения коррекций и способы обеспечениянадёжности выполнения задачи наведения.2.
Классификация различных способов коррекцииКоррекция траектории представляет собой её целенаправленное изменение для получения с требуемой точностью определённых элементов орбитыКА и проводится путём приложения силы тяги к аппарату с помощью включения реактивного корректирующего двигателя.Способы коррекции траектории можно классифицировать по следующимпризнакам.1. По величине корректирующего ускорения коррекция может быть импульсной или непрерывной. С точки зрения энергетических затрат важно,чтобы характеристическая скорость Vк , сообщаемая КА при коррекции быламинимальной, что соответствует минимуму расхода топлива, затрачиваемого накоррекцию. Известно, что величина Vк минимальна при бесконечно большомускорении, сообщаемом КА корректирующим двигателем (КД), поэтому теоретически самым выгодным является случай импульсного изменения скоростиполёта при коррекции.Поскольку ускорение, сообщаемое КА КД всегда конечно, то предположение о мгновенности изменения скорости при коррекции справедливо лишьтогда, когда ошибки в параметрах движения, обусловленные этим предположением, соизмеримы с ошибками метода расчёта траектории КА.
Во многих случаях при расчёте коррекции справедливо использование гипотезы о мгновенности изменения скорости.2. В общем случае с помощью одного импульса скорости, приложенногок КА в некоторой точки траектории, варьируя три составляющие этого импульса, т.е. величину и направление импульса скорости, можно скорректировать трипараметра траектории, например, три координаты или три составляющие скорости движения КА. Такая коррекция называется трёхкомпонентной.
Для еёреализации на КА устанавливается специальная система, позволяющая ориентировать ось двигателя в любом заданном направлении.Если при коррекции могут варьироваться одна или две компоненты корректирующего импульса, то такие коррекции называют соответственно однокомпонентными или двухкомпонентными.Однокомпонентная коррекция соответствует случаю, когда направлениекорректирующего импульса фиксировано (с точностью до знака) и может меняться только его величина. Такое направление может быть коллинеарнонаправлению на Солнце, звёзду или какую-нибудь планету.Двухкомпонентная коррекция имеет место, если:а) задана плоскость, в которой должен лежать корректирующий импульси в этом случае будут варьироваться лишь два параметра: величина импульса иположение импульса в плоскости, которой может быть, например, плоскость,ортогональная направлению на Солнце;б) величина импульса фиксирована, но свободным является его направление в пространстве.3.
С точки зрения количества включений КД, коррекции можно подразделить на одноразовые и многоразовые. В свою очередь, многоразовые коррекции делятся на однородные (несвязанные) и неоднородные (связанные).Однородные (несвязанные) коррекции могут использоваться для последовательного уменьшения ошибок движения. В этом случае при каждом включении КД прицеливание производится в одну и ту же точку, т.е. характеристикикоррекции определяются из однородных условий.Неоднородные (связанные) коррекции могут использоваться для сокращения энергетических затрат, а также в том случае, если число корректируемыхпараметров превышает число свободных компонент скорости при одноразовойкоррекции.
При подобной коррекции происходит поочерёдное смещение траектории либо вдоль наиболее эффективных направлений, либо вдоль фиксированных направлений так, чтобы суммарное смещение получилось равным заданному. При каждом включении КД прицеливание производится в новую точку, т.е. характеристики коррекции определяются из различных условий. Необходимый результат в этом случае получается только после проведения всехкоррекций.4. По числу параметров траектории, подлежащих исправлению, коррекция может быть однопараметрической, двухпараметрической и т.д.3.
Выбор корректируемых параметровПараметры траектории, которые подлежат целенаправленному изменению в процессе коррекции называются корректируемыми параметрами и образуют пространство корректируемых параметров (ПКП). Очевидно, чтокаждой реализации реальной траектории в ПКП будет соответствовать конкретная точка. Осуществление коррекции приведёт к смещению этой точки впространстве параметров. Причём целью коррекции будет целенаправленноеперемещение её из начального состояния в заданную область.
Смещение в пространстве корректируемых параметров 1 , 2 , 3 в общем виде связано с вектором корректирующего ускорения a (t ) соотношениемtк N t , a (t )dt ,0где N t , a(t ) – нелинейный оператор, t к – время работы ДК.Наличие указанной нелинейности приводит к существенному усложнению анализа. Поэтому на практике корректируемые параметры i (i 1, n) стараются выбирать так, чтобы оператор N t , a(t ) можно было бы заменить линейным относительно a (t ) , т.е.N t , a (t ) N (t )a (t ),tк N (t )a (t )dt0При этом будет иметь место линейная коррекция.
Для случая мгновенного изменения скорости N (t ) есть матрица производных корректируемых параметров по компонентам корректирующей скорости, определяющих эффективность коррекции 1 1 1 VV y Vz xN (t ) n n n Vx V y Vz Величина характеристической скорости коррекции будет определятьсякак tк Vк a (t )dt0При реализации импульсной n -разовой коррекции n N (ti )Vк i ,i 1где Vк i – вектор импульса скорости при проведении i -й коррекции.При полёте к планетам Солнечной системы одним из источников нелинейности связи корректируемых параметров с корректирующим импульсом является притяжение планеты-цели. Для исключения нелинейного влияния притяжения планеты в качестве корректируемых параметров следует выбиратьоскулирующие характеристики скорости на бесконечно большом удалении отпланеты V и прицельную дальность b планетоцентрического движения, рассчитанные для момента наиболее тесного сближения с планетой по следующимформулам: V V sin cos , b b cos sin , гдеab2sin a 2 , b 2 ,V V 2 , cos ,,rVVa2 b2a2 b2 r V – интеграл Лапласа,r r V – интеграл площадей, – гравитационный параметр планеты, r ,V – радиус- вектор и вектор скорости планетоцентрического движения.Компоненты вектора скорости V и вектора прицельной дальностиb определяют геометрические условия сближения КА с планетой и энергиюпланетоцентрического движения.В качестве корректируемых параметров можно принять, например, двекомпоненты смещения b b bзад в картинной плоскости (КП).В качестве третьего корректируемого параметра выбирается время движения КА до картинной плоскости, проходящей через ц.м.
планеты.При вычислении bзад для отображения точек физического пространствавблизи планеты-цели на КП с координатами 1 и 2 могут быть использованыследующие соотношения41bзад r sin 1 1 2 ,1cosrV0 01 зад bзад b 1 , 2 зад bзад b 0 20 , 0 V r Vb .V r VЗдесь 10 и 20 – единичные векторы, определяющие направления осей вКП,r , – полярные координаты отображённой точки в плоскости заданной траектории.4.
а) при проверке
ошибки наведения стабилизатора в
вертикальной плоскости с включенным
интегратором проделать следующие
операции:
—установить и
выставить коллиматор;
—установить пушку
горизонтально и зафиксировать ее
положение по щитку ограждения или
по другому ориентиру с точностью до
Г;
—включить
выключатель 3
(рис.
87) ПРЕОБР на пульте оператора;
—через 3 мин после
включения выключателя ПРЕОБР расстопорить
прибор 1Г42;
—установить
рукоятку на ручном подъемном механизме
пушки в положение СТАБ;
—зафиксировать
исходное положение прицельной марки
(вертикального штриха) по шкалам сетки
коллиматора;
— с помощью пульта
управления придать пушке установившуюся
скорость перемещения вверх в пределах
до 1 град/с;
—при прохождении
пушкой горизонтального положения
(±1,5°) замерить рассогласование между
исходными и установившимся положениями
марки по вертикальной шкале сетки
коллиматора;
—замерить
рассогласование при движении пушки
вверх еще три раза при величине
установившейся скорости в пределах до
1 град/с;
—провести
аналогичные замеры при движении пушки
вниз;
—определить
ошибку наведения отдельно в каждую
сторону как среднеарифметическое
значение по четырем замерам. Величина
ошибки наведения не должна превышать
1′. В случае наличия неплавности при
наведении необходимо выделить постоянную
составляющую рассогласования, для чего
необходимо замерить с учетом знака
крайние значения Е,
Е2
рассогласования марки относительно
исходного положения и определить
постоянную составляющую рассогласования
по формуле
![]()
где Е — величина
рассогласования,
б) при проверке
ошибки наведения стабилизатора в
горизонтальной плоскости проделать
следующие операции:
—зафиксировать
исходное положение прицельной марки
(вертикального штриха) по шкалам сетки
коллиматора;
—с помощью пульта
управления придать башне установившуюся
скорость движения влево в пределах до
1 град/с;
—замерить
рассогласование между исходным и
установившимся положениями марки
по горизонтальной шкале сетки коллиматора.
В
случае
неплавности хода выделить постоянную
составляющую рассогласования по формуле,
указанной выше;
—замерить
рассогласование при движении башни
влево с другой величиной установившейся
скорости в пределах до 1 град/с;
—провести
аналогичные замеры при движении
башни вправо;
—определить
ошибку наведения отдельно в каждую
сторону как среднеарифметическое
значение. Величина ошибки наведения
не должна превышать 1′.
Выключить
стабилизатор, для чего:
—установить
рукоятку на ручном подъемном механизме
пушки в положение РУЧН;
—застопорить
прибор 1Г42;
—выключить
выключатель ПРЕОБР на пульте оператора.
9.1.11. Проверка и регулировка электрического нуля изделия 1азз
Перед данной
проверкой должна быть проверена ошибка
наведения стабилизатора по методике,
указанной в подразд. 9.1.10.
Для проверки
электрического нуля системы проделать
следующие операции:
—подключить стенд
КЭС-12К к контрольным разъемам прибора
1Г42 и электроблока;
—убедиться в том,
что оружие разряжено, и включить АЗР
ЭЛ. СПУСК на левом распределительном
щитке;
—установить
рукоятку БАЛЛИСТИКА в положение Б;
—включить
выключатели 3
(рис.
87) ПРЕОБР, 2
ВЫ-ЧИСЛ
и 8
ДАЛЬНОМ
на пульте оператора;
—нажать кнопку
сброса дальности, расположенную на
пульте управления прибора 1Г42;
—через 3 мин
расстопорить прибор 1Г42;
—перевести рукоятку
подъемного механизма в положение СТАВ;
—развернуть башню
в такое положение, чтобы крен оси цапф
пушки, измеренный оптическим квадрантом
КО-1 на контрольной площадке башни,
был минимальным (но не более ±10°);
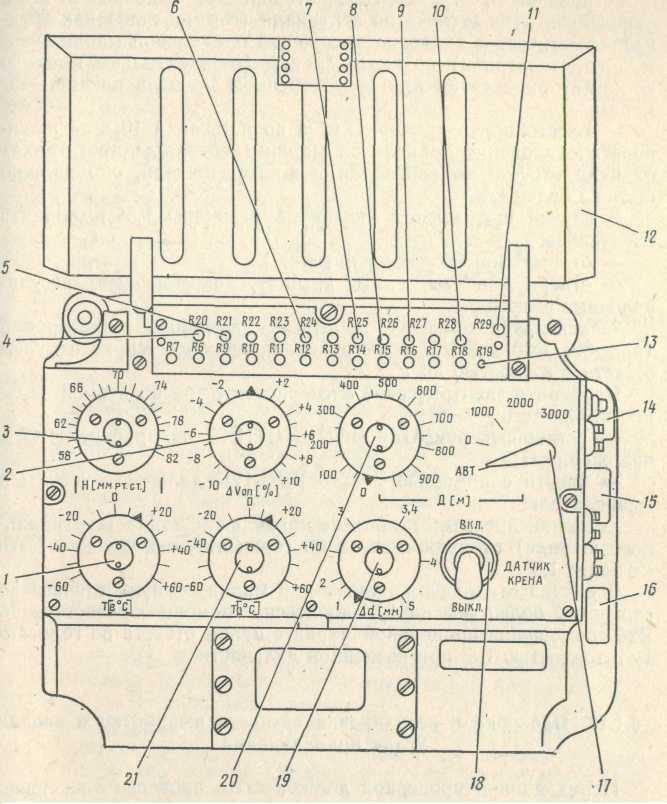
Рис. 89. Панель
управления вычислителя (показано со
снятой крышкой над
регулировочными
резисторами):
1
— потенциометр для ввода поправки на
температуру воздуха; 2
—
потенциометр для ввода поправки на
разброс начальной скорости полета
снаряда в зависимости от партии
зарядов; 3 — потенциометр для ввода
поправки на давление окружающего
воздуха; 4—резистор
К20 для регулировки поправки на боковую
составляющую скорости ветра; 5
— резистор
К21 для регулировки поправки на крен оси
цапф пушки; 6
—
резистор R24
для регулировки крутизны канала b
;
7
— резистор R25
для регулировки углов a;
8 — резистор R26
выверки a;
9
— резистор
R27
выверки b;
10
—
резистор R28
для коррекции нуля wц.
11—
резистор R29
для регулировки углов b;
12
—крышка; 13—
резистор R19
для регулировки поправки на Д ;14—
разъем РСГ32; 15
— разъем РСГ19; 16
—
разъем РСГ50; 17—
переключатель диапазонов дальности
для ручного ввода: 18
— выключатель крена; 19
—
потенциометр для ввода поправки на
износ канала ствола; 20—
потенциометр для ручного ввода дальности;
21
—
потенциометр для ввода поправки на
температуру заряда
—произвести
трехкратное стопорение прибора 1Г42
и определить нуль отсчета по вертикали
(горизонтали) как среднеарифметическое
значение положений прицельной марки
(вертикального штриха) по вертикальной
(горизонтальной) шкале коллиматорной
сетки при застопоренном прицеле по трем
замерам;
—расстопорить
прибор 1Г42 и по истечении 10 с зафиксировать
отклонение прицельной марки (вертикального
штриха) от нуля отсчета по вертикали и
по горизонтали, оно должно быть не более
1,5′.
В
случае превышения указанной величины
1,5′ выполнить следующее:
—открыть крышку
вычислителя;
—отвернув винты,
снять крышку, закрывающую регулировочные
резисторы;
—используя
отвертку, добиться с помощью резисторов
8
(рис.
89) К26 и 9
К27
совмещения прицельной марки с нулем
отсчета с точностью до 1′.
Проверить
электрический нуль системы при введенной
дальности, для чего:
—установить
рукоятку БАЛЛИСТИКА на приборе 1Г42 в
положение Н;
—ввести с помощью
стенда КЭС-12К дальность 2000 м в вычислитель;
—зафиксировать
отклонение прицельной марки (вертикального
штриха) от нуля отсчета по горизонту,
оно должно быть не более 1,5′.
В
случае отклонения прицельной марки от
нуля отсчета по горизонту более чем на
1,5′ добиться с помощью резистора 10
К28
совмещения прицельной марки с нулем
отсчета по горизонту с точностью
1,5′ при введенной дальности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
10.02.201511.44 Mб16Введение в макроэкономику_Матвеева_2007.djvu
- #
- #
- #
- #
- #
- #

Из анализа первого участка наведения видна огромная роль ошибок операторов при введении рекомендованных углов упреждения при пуске ракет. Если ошибка в углах упреждения ракеты будет превышать допустимые значения, то начальный участок наведения по времени может оказаться больше полетного времени ракеты до дели, в результате чего промах ракеты будет недопустимо большим.
Основное свойство метода пропорционального сближения заключается в том, что при наличии ошибки наведения ел бортовая аппаратура ракеты формирует такой закон управления рулями, при котором управляющая сила, пропорциональная ошибке наведения, отрабатывает ее, как правило, за время, меньшее, чем время сближения ракеты с целью.
Для борьбы с воздушными целями используются ракеты, управляющая сила которых имеет аэродинамическую природу, т. е. возникает как результат взаимодействия воздушного потока с планером ракеты. Планер ракеты состоит из конструкций, которые непосредственно принимают на себя силы давления и трения о воздух. Он представляет собой корпус ракеты, на котором размещаются крылья, стабилизатор и рули.
При наличии ошибки наведения Snф 0 бортовая аппаратура ракеты вырабатывает сигнал управления рулями ракеты, который прямо пропорционален ошибке наведения. Набегающий на руль, отклоненный на угол 8Р, воздушный поток_приводцт к возникновению нормальной к ее поверхности силе Nv, которая может быть разложена на две составляющие вдоль осей ОХ и OY скоростной системе координат. Составляющая Ур, перпендикулярная вектору скорости V, называётся подъемной силой на руле ракеты, а составляющая Qp., направленная в обратном скорости направлении, называется индуктивным сопротивлением руля.
Подъемная сила на руле ракеты создает относительно центра масс ракеты управляющий момент МУ=УР‘1Р, который разворачивает корпус ракеты на угол атаки А. Разворот ракеты относительно центра масс будет происходить до тех пор, пока за счет подъемной силы на стабилизаторе_хвостовой части ракеты не возникнет стабилизирующий момент Мст = Уст • /ст,_равный управляющему моменту на рулях ракеты. При равенстве Му=МСт полет ракеты будет происходить на так называемом балансировочном режиме, когда соответствующему углу отклонения. руля 8Р ракеты соответствует строго определенное значение угла атаки а.
Добавить комментарий
Learn about this topic in these articles:
ballistic missile
-

In rocket and missile system: Design principles
…generally expressed as launch-point errors, guidance/en-route errors, or aim-point errors. Both launch- and aim-point errors can be corrected by surveying the launch and target areas more accurately. Guidance/en-route errors, on the other hand, must be corrected by improving the missile’s design—particularly its guidance. Guidance/en-route errors are usually measured by a…
Read More