![]()
vl_cnc
85
Anat2015
306
Юрий567
0

agering
33
Юрий567
0
agering
33

andrey2147
134
nomed
11
andrey2147
134
nomed
11

Vengeance
48
andrey2147
134
Vengeance
48
andrey2147
134
S_varog
7
andrey2147
134
Vengeance
48
andrey2147
134
andrey2147
134
Присоединяйтесь к обсуждению
Вы можете опубликовать сообщение сейчас, а зарегистрироваться позже.
Если у вас есть аккаунт, войдите в него для написания от своего имени.
Примечание: вашему сообщению потребуется утверждение модератора, прежде чем оно станет доступным.
3-30 Description of diagnostic letters F… and E…
E255 Feedrate-override S-0-0108 = 0
If absolute positions are selected while in a positioning operation mode,
the control drive must be homed to a reference position. If this is not the
case, an absolute position cannot be reached. The drive rejects this
positioning command and stops. The warning E254 will be given.
Cause:
Absolute positioning was selected without the drive being referenced.
Remedies:
1.
Do the homing (referencing) command with the drive or
2.
do only relative positioning.
See also the function description «Drive-Controlled Homing».
With the parameter S-0-0108, Feedrate override, the travel velocity of
all drive-controlled travel commands can be changed proportionally
(in %).
If the value of this parameter is 0, the travel velocity is also 0. With
velocity = 0, the motor remains stationary despite having a commanded
value.
Causes:
1. The parameter S-0-0108, Feedrate override is 0.
2. For devices with analog inputs: Feedrate override via analog input is
activated, and the voltage at the analog input is 0.
3. The feed potentiometer of the connected control system is at 0 or is
being evaluated incorrectly.
Remedies:
For 1.: Set Feedrate override > 0, so that the drive moves. Full speed is
attained with 100% .
For 2.: Apply a voltage > 0 proportional to the desired speed,
+10V corresponds to 100 % (full) speed.
Alternative: De-activate Feedrate override.
For 3.: Turn the feed potentiometer cautiously, check the analog signal
and the evaluation for it.
See also the functional description: «Sequence control Drive-Controlled
Homing».
ECODRIVE03 SMT-02VRS
DOK-ECODR3-SMT-02VRS**-WA01-EN-P

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:
Скачиваний:
793
Добавлен:
21.03.2015
Размер:
6.94 Mб
Скачать
![]()
|
B—64144RU/01 |
РАБОТА |
6. ФУНКЦИИ БЕЗОПАСНОСТИ |
6.4
ПРОВЕРКА
ОГРАНИЧЕНИЯ ХОДА ДО ВЫПОЛНЕНИЯ ПЕРЕМЕЩЕНИЯ
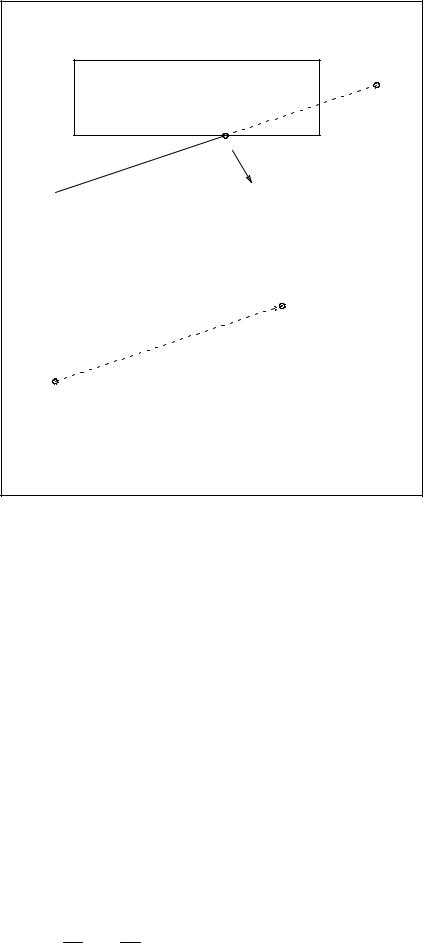
Во время автоматической операции до начала перемещения, заданного определенным блоком, проверяется, войдет ли инструмент в зону запрета входа, определенную ограничением сохраненного входа, 1 или 2, путем определения положения конечной точки относительно текущего положения станка и с учетом заданной величины перемещения. Если подтвердится, что инструмент войдет в зону запрета, определенную ограничением сохраненного хода, инструмент немедленно остановится, как только начнет перемещение для данного блока, а отобразится сигнал тревоги.
ОПАСНО
Также производится проверка, будут ли находиться координаты конечной точки, которая должна быть достигнута в результате прохождения расстояния, заданного в каждом блоке, в зоне запрета. В данном случае, траектория, после которой следует команда перемещения, не проверяется. Однако, если инстру— мент войдет в зону запрета, определенную ограниче— нием сохраненного хода, 1 или 2, возникает сигнал тревоги. (Смотрите пример, представленный ниже.)
Пример 1)
Зона запрета, определенная ограничением сохраненного хода 1 или 2
|
a |
|
|
Начальная |
Конечная точка |
|
точка |
Инструмент останавливается в точке, а в соответствии с ограничением сохраненного хода 1 или 2.
Зона запрета, определенная ограничением сохраненного хода 1 или 2
Конечная точка
Непосредственно после начала перемещения из начальной точки инструмент останавливается, чтобы дать возможность выполнить проверку ограничения хода до перемещения.
487
|
6. ФУНКЦИИ БЕЗОПАСНОСТИ |
РАБОТА |
B—64144RU/01 |
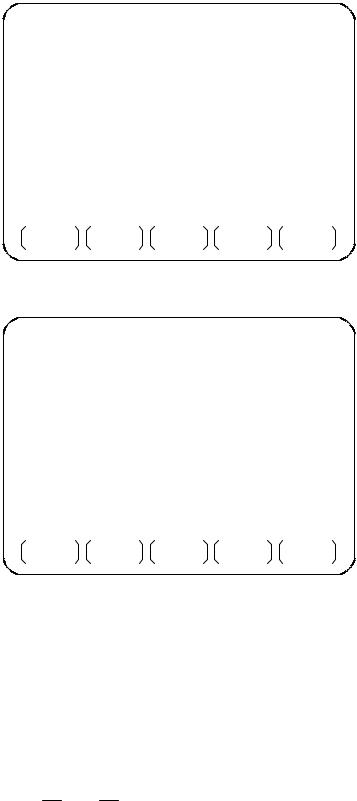
Пример 2)
Конечная
Зона запрета, определенная точка ограничением сохраненного  хода 1 или 2
хода 1 или 2
a
 Инструмент останавливается в точке, Начальная точка а в соответствии с ограничением
Инструмент останавливается в точке, Начальная точка а в соответствии с ограничением
сохраненного хода 1 или 2.
|
Зона запрета, определенная |
Конечная |
|
ограничением сохраненного |
|
|
хода 1 или 2 |
точка |
Непосредственно после начала перемещения из начальной точки инструмент останавливается, чтобы дать возможность выполнить проверку ограничения хода до перемещения.
|
Пояснения |
Когда проверка ограничения хода происходит до выполнения |
|
перемещения, тоспомощьюNPC (разряд2 параметраном.1301) |
|
|
можно определить, будет ли проводиться перемещение, |
|
|
выполняемое блоком G31 (пропуск) и блоком G37 (автомати— |
|
|
ческое измерение длины инструмента). |
|
|
Ограничения |
|
|
D Блокировка станка |
Еслиблокировкастанкаприменяется вначалеперемещения, то |
|
проверка ограничения хода до перемещения не выполняется. |
|
|
D G23 |
Если ограничение сохраненного хода 2 не действует (режим |
|
G23), то проверка на предмет вхождения инструмента в зону |
|
|
запрета, определенную ограничением сохраненного хода 2, не |
|
|
выполняется. |
|
|
D Перезапуск |
Если при перезапуске программы инструмент находится в зоне |
|
программы |
запрета, выдается сигнал тревоги. |
|
D Ручное вмешательство |
Если выполнение блока перезапускается после ручного |
|
после остановки |
вмешательства, которое следует за остановкой блокировки |
|
блокировки подачи |
подачи, сигнал тревоги не выдается, даже если конечная точка |
|
после ручного вмешательства находится в зоне запрета. |
488

|
B—64144RU/01 |
РАБОТА |
6. ФУНКЦИИ БЕЗОПАСНОСТИ |
|
D Блок, состоящий из |
Привыполненииблока, состоящегоизмногократныхопераций |
|
|
многократных |
(таких как постоянный цикл), в начальной точке каждой |
|
|
операций |
операции, конечная точка которой находится в зоне запрета, |
|
|
выдается сигнал тревоги. |
||
|
D Вычерчивание |
Проверка не производится, если осуществляется только |
|
|
созданиечертежавкачествечастидинамическогографического |
||
|
отображения ( выполняется только чертеж, без обработки). |
Сигнал тревоги
Номер Сообщение
510OVER TRAVEL: +n (ПЕРЕБЕГ: +n)
511OVER TRAVEL: -n (ПЕРЕБЕГ: -n)
Содержание
Проверка ограничения хода перед перемещениемпоказывает, чтоконечная точка блока входит в зону запрета при ограничении хода вдоль положительной n-й оси. Исправьте программу.
Проверка ограничения хода перед перемещениемпоказывает, чтоконечная точка блока входит в зону запрета при ограничении хода вдоль отрицательной n-й оси. Исправьте программу.
489

|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
РАБОТА |
|
|
САМОДИАГНОСТИКИ |
B—64144RU/01 |
7 СИГНАЛ ТРЕВОГИ И ФУНКЦИИ САМОДИАГНОСТИКИ
При возникновении сигнала тревоги появляется соответст— вующий экран сигналов тревоги, отображающий причину возникновения сигнала тревоги. Причины сигналов тревоги классифицируются по номерам сигналов тревоги. Данная функциядаетвозможностьсохранитьдо50 последнихсигналов тревоги и отобразить их на экране (отображение журнала сигналов тревоги).
Иногда может показаться, что система остановлена, хотя ни один из сигналов тревоги не отобразился. В данном случае, возможно, система выполняет какую—либо обработку. Состояние системы можно проверить с помощью функции самодиагностики.
490
|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
||
|
B—64144RU/01 |
РАБОТА |
САМОДИАГНОСТИКИ |
7.1
ОТОБРАЖЕНИЕ СИГНАЛА ТРЕВОГИ
Пояснения
|
D Экран сигналов |
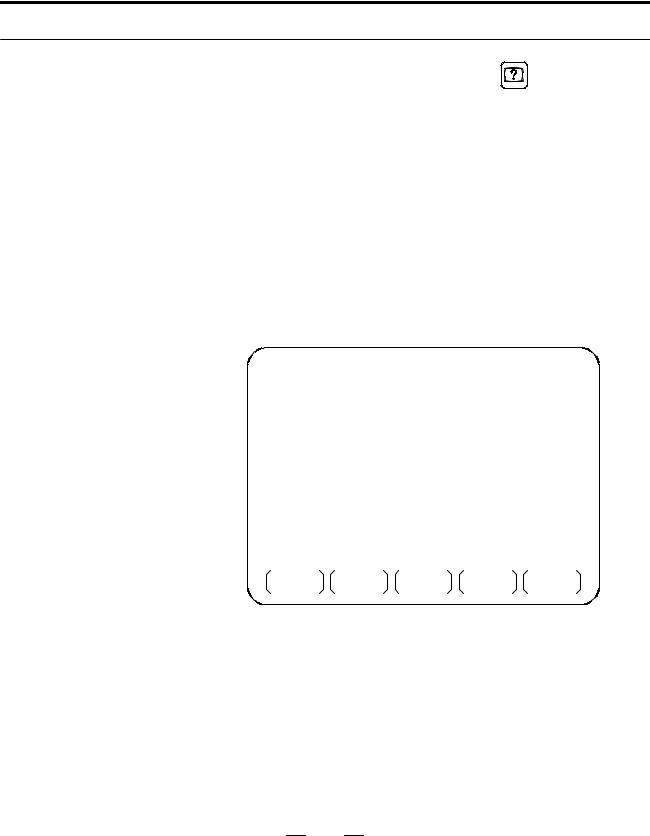
При возникновении сигналов тревоги |
появляется экран |
||
|
тревоги |
сигналов тревоги. |
|||
|
ALARM MESSAGE |
0000 |
00000 |
||
|
100 |
PARAMETER WRITE ENABLE |
|||
|
510 |
OVER TR1AVEL |
:+X |
||
|
417 |
SERVO ALARM |
: X AXIS DGTL PARAM |
||
|
417 |
SERVO ALARM |
: X AXIS DGTL PARAM |
|
S 0 T0000 |
|||||
|
MDI * * * * |
* * * |
* * * |
ALM |
18 : 52 : 05 |
|
|
ALARM |
MSG |
HISTRY |
|||
|
D Другой способ для |
В некоторых случаях, |
вместо |
появления |
экрана сигналов |
||||||
|
отображения сигналов |
тревоги внизу экрана отображается ALM. |
|||||||||
|
тревоги |
||||||||||
|
PARAMETER (AXIS/UNIT) |
O1000 N00010 |
|||||||||
|
1001 |
INM |
|||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
1002 |
XIK |
DLZ |
JAX |
|||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
1003 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||
|
1004 |
IPR |
ISC |
ISA |
|||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|||
|
>_ |
S |
0 T0000 |
||||||||
|
MEM |
*** * |
** * |
* ** |
ALM |
08 : 41 : 27 |
|||||
|
NO.SRH |
ON:1 |
OFF:0 |
+INPUT |
INPUT |
В данном случае для отображения экрана сигналов тревоги следует выполнить следующие действия:
1.Нажмите функциональную клавишу  .
.
2.Нажмите на дисплейную клавишу выбора главы [ALARM].
491

|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
РАБОТА |
|
|
САМОДИАГНОСТИКИ |
B—64144RU/01 |
|
|
D Сброс сигнала тревоги |
Причину возникновения сигнала тревоги отображают номера |
|
|
сигналов тревоги и сообщения о них. Чтобы сбросить сигнал |
||
|
тревоги, следует устранить причину его возникновения, азатем |
||
|
нажать клавишу перезагрузки. |
||
|
D Номера сигналов |
Коды ошибок классифицируются следующим образом: |
|
|
тревоги |
Ном. 000 по 255: СигналытревогиP/S (Ошибкипрограммы) (*) |
|
|
Ном. 300 по 349: Сигналы тревоги, |
относящиеся к абсолют— |
ному импульсному шифратору (APC)
Ном. 350 по 399: Сигналы тревоги, относящиеся к серийному импульсному шифратору (SPC)
Ном. 400 по 499: Сигналы тревоги системы слежения (1/2) Ном. 500 по 599: Сигналы тревоги о перебеге Ном. 600 по 699: Сигналы тревоги системы слежения (2/2) Ном. 700 по 739: Сигналы тревоги о перегреве
Ном. 740 по 748: Сигналы тревоги, относящиеся к жесткому нарезанию резьбы метчиком
Ном. 749 по 799: Сигналы тревоги, относящиеся к шпинделю Ном. 900 по 999: Сигналы тревоги, относящиеся к системе от Ном. 5000 и далее: Сигнал тревоги P/S
(Программные ошибки )
* Для сигнала тревоги (ном. 000-255), который возникает в связи с фоновыми операциями, предусмотрено обозначение “xxxBP/S сигналтревоги” (гдеxxx является номеромсигнала тревоги). Для сигнала тревоги ном. 140 предусмотрен только сигнал тревоги BP/S. Для получения более подробной информации о сигналах тревоги смотрите список сигналов тревоги в Приложении G.
492
|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
||
|
B—64144RU/01 |
РАБОТА |
САМОДИАГНОСТИКИ |
7.2
ОТОБРАЖЕНИЕ ЖУРНАЛА СИГНАЛОВ ТРЕВОГИ
Сохраняется и выводится на экран до 50 самых последних сигналов тревоги ЧПУ.
Для отображения журнала сигналов тревоги следует выполнить следующие действия:
Порядок выполнения для отображения журнала сигналов тревоги
|
Порядок действий |
1 Нажмите функциональную клавишу |
. |
2Нажмите дисплейную клавишу выбора главы [HISTRY]. Появляется журнал сигналов тревоги.
Отображаются следующие элементы информации:
(1)Дата возникновения сигнала тревоги
(2)Ном. сигнала тревоги
(3)Аварийное сообщение (для некоторых сигналов тревоги сообщения отсутствуют)
(4)Номер страницы
3Смените страницу при помощи клавиши перелистывания одной страницы.
4Чтобыудалитьзаписаннуюинформацию, нажмитедисплей— ную клавишу [(OPRT)], а затем клавишу [DELETE].
|
ALARM HISTORY |
O0100 N00001 |
|
(1)97.02.14 16:43:48 |
PAGE=1 |
|
|
(4) |
||
|
(2)010 (3)MPROPER G-CODE |
||
|
97.02.13 8 :22:21 |
||
|
506 OVER TRAVEL: +1 |
||
|
97.02.12 20 :15:43 |
||
|
417 SERVO ALARM: X AXIS DGTL PARAM |
|
MEM * * * * |
* * * |
* * * |
19 : 47 : 45 |
|
|
ALARM |
MSG |
(OPRT) |
||
|
HISTRY |
493
|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
РАБОТА |
|
|
САМОДИАГНОСТИКИ |
B—64144RU/01 |
7.3
ПРОВЕРКА С ПОМОЩЬЮ ОКНА САМОДИАГНОСТИКИ
Иногда может показаться, что система остановлена, хотя ни один из сигналов тревоги не отобразился. В данном случае, возможно, система выполняет какую—либо обработку. Состоя— ние системы можно проверить с помощью экрана самодиагностики.
Порядок выполнения диагностики
|
Порядок действий |
1 Нажмите функциональную клавишу |
. |
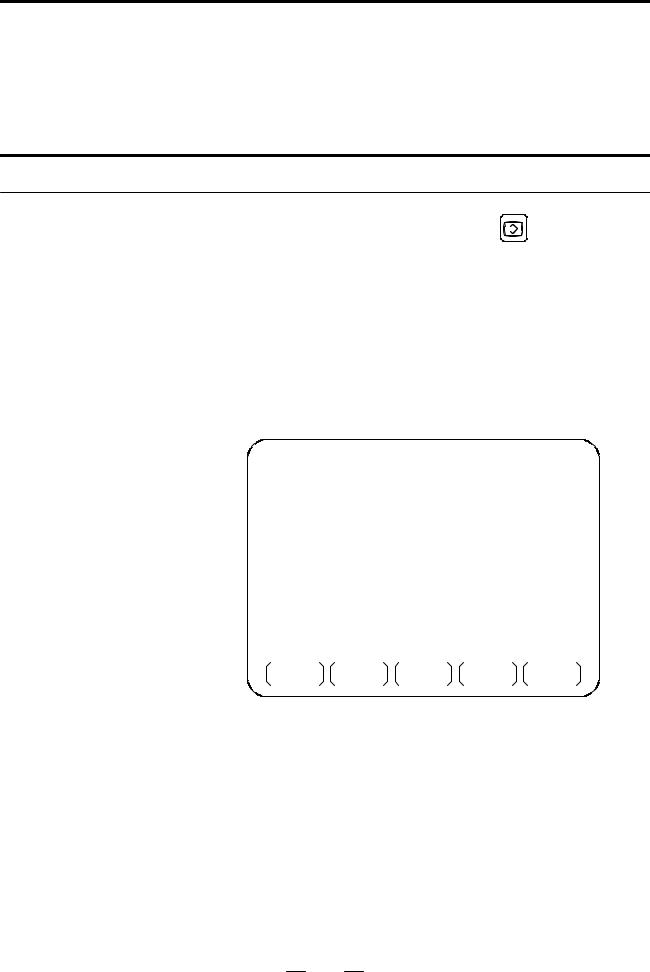
2Нажмите клавишу выбора главы [DGNOS].
3Экран диагностики расположен более чем на 1 странице. Выберите экран с помощью следующей операции:
(1)Смените страницу при помощи клавиши перелисты— вания по одной странице.
(2)С помощью дисплейной клавиши
—Введите номер диагностических данных для отобра— жения.
—Нажмите [N SRCH].
|
DIAGNOSTIC (GENERAL) |
O0000 N0000 |
|
|
000 |
WAITING FOR FIN SIGNAL |
:0 |
|
001 |
MOTION |
:0 |
|
002 |
DWELL |
:0 |
|
003 |
IN-POSITION CHECK |
:0 |
|
004 |
FEEDRATE OVERRIDE 0% |
:0 |
|
005 |
INTERLOCK/START-LOCK |
:0 |
|
006 |
SPINDLE SPEED ARRIVAL CHECK |
:0 |
|
>_ |
||||
|
EDIT * * * * * * * |
* * * |
14 : 51 : 55 |
||
|
PARAM |
DGNOS |
PMC |
SYSTEM |
(OPRT) |
494

|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
||
|
B—64144RU/01 |
РАБОТА |
САМОДИАГНОСТИКИ |
|
Пояснения |
Номерадиагностикиот000 по015 отображаютсостояния, когда |
|
|
задана команда, но на экране это отображается таким образом, |
как будто она не выполняется. В таблице, приведенной ниже, перечисляются внутренние состояния, когда в правом конце каждой строки на экране отображается 1.
Таблица 7.3 (a) Сигнал тревоги отображается, когда задана команда, но на экране это отображается таким образом, как будто она не выполняется
Ном. Отображение
000WAITING FOR FIN SIGNAL (ОЖИДАНИЕ СИГНАЛА FIN)
001MOTION (ДВИЖЕНИЕ)
002 DWELL (ЗАДЕРЖКА)
003IN-POSITION CHECK
(ПРОВЕРКА ДОСТИЖЕНИЯ ЗАДАННОГО ПОЛОЖЕНИЯ)
004FEEDRATE OVERRIDE 0%
(РУЧНАЯ КОРРЕКЦИЯ СКОРОСТИ ПОДАЧИ 0%)
005INTERLOCK/START-LOCK (ВЗАИМОБЛОКИРОВКА/БЛОКИРОВКА ПУСКА)
006SPINDLE SPEED ARRIVAL CHECK (ПРОВЕРКА ДОСТИЖЕНИЯ ЗАДАННОЙ СКОРОСТИ ШПИНДЕЛЯ)
010PUNCHING
(ВЫВОД ДАННЫХ НА ПЕРФОЛЕНТУ)
011 READING (СЧИТЫВАНИЕ)
012WAITING FOR (UN) CLAMP
(ОЖИДАНИЕ ФИКСАЦИИ/ОСВОБОЖДЕНИЯ)
013JOG FEEDRATE OVERRIDE 0%
(РУЧНАЯ КОРРЕКЦИЯ СКОРОСТИ РУЧНОЙ НЕПРЕРЫВНОЙ ПОДАЧИ 0%)
014WAITING FOR RESET.ESP.RRW.OFF (ОЖИДАНИЕ ПЕРЕЗАГРУЗКИ, АВАРИЙНОЙ ОСТАНОВКИ, ПЕРЕЗАГРУЗКИ И ПЕРЕМОТКИ)
015EXTERNAL PROGRAM NUMBER SEARCH
(ВНЕШНЕЙ ПОИСК НОМЕРА ПРОГРАММЫ)
Внутреннее состояние при отображении 1
M, S. Выполняются функции T, M и S
Выполняется команда перемещения в автоматическом режиме
Выполняется задержка
Выполняется проверка достижения заданного положения
Ручная коррекция рабочей подачи0%
Взаимоблокировка включена
Ожидание включения сигнала достижениязаданной скорости шпинделя
Вывод данных через интерфейс устройства считывания/вывода данных на перфоленту
Ввод данных через интерфейс устройства считывания/вывода данных на перфоленту
Ожидание фиксации/освобождения делительноповоротного стола перед началом или по завершении индексации делительно-поворотного стола по оси В
Ручная коррекция ручной непрерывной подачи 0%
Аварийная остановка, внешняя перезагрузка, перезагрузка и перемотка или нажата клавиша перезагрузки на панели ручного ввода данных
Внешний поиск номера программы
495
|
7. СИГНАЛ ТРЕВОГИ И ФУНКЦИИ |
РАБОТА |
|
|
САМОДИАГНОСТИКИ |
B—64144RU/01 |
Таблица 7.3 (b) Сигнал тревоги отображается, #когда автоматическая операция остановлена или
приостановлена
Ном. Отображение
020CUT SPEED UP/DOWN (УВЕЛИЧЕНИЕ/СНИЖЕНИЕ СКОРОСТИ РЕЗАНИЯ)
021RESET BUTTON ON
(НАЖАТА КНОПКА ПЕРЕЗАГРУЗКИ)
Внутреннее состояние при отображении 1
Появляется, когда включается аварийная остановка или возникает сигнал тревоги, относящийся к сервосистеме
Появляется, когда нажимается кнопка перезагрузки
|
022 |
RESET AND REWIND ON |
Включены перезагрузка и перемотка |
|
|
(ВКЛЮЧЕНЫ ПЕРЕЗАГРУЗКА И ПЕРЕМОТКА) |
|||
|
023 |
EMERGENCY STOP ON |
Появляется, когда включена аварийная остановка |
|
|
(ВКЛЮЧЕНА АВАРИЙНАЯ ОСТАНОВКА) |
|||
|
024 |
RESET ON |
Появляется, когдавключены внешняя перезагрузка, |
|
|
(ВКЛЮЧЕНА ПЕРЕЗАГРУЗКА) |
аварийная остановка, перезагрузка или нажата |
||
|
клавиша перезагрузки и перемотки |
|||
|
025 |
STOP MOTION OR DWELL |
Указатель, при котором останавливается распреде- |
|
|
(ОСТАНОВКА ИЛИ ЗАДЕРЖКА) |
ление импульсов. Появляется в следующихслучаях: |
||
|
(1) |
Включена внешняя перезагрузка. |
||
|
(2) |
Нажата клавиша перезагрузки и перемотки. |
||
|
(3) |
Включена аварийная остановка. |
||
|
(4) |
Включена блокировка подачи. |
||
|
(5) |
Нажата клавиша перезагрузкина панелиручного |
||
|
ввода данных. |
|||
|
(6) |
При переключении на ручной режим |
||
|
(JOG/HANDLE/INC). |
|||
|
(7) |
При возникновении прочих сигналов тревоги. |
||
|
(Возниксигналтревоги, которыйнеустановлен). |
В таблице, приведенной ниже, перечислены сигналы и состояния, которые активируются, когда каждый из элементов данных диагностики равен 1. Каждая комбинация значений данных диагностики отображает одно состояние.
|
020 |
CUT SPEED UP/DOWN (УВЕЛИЧЕНИЕ/ |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
|
СНИЖЕНИЕ СКОРОСТИ РЕЗАНИЯ) |
||||||||
|
021 |
RESET BUTTON ON |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
|
(НАЖАТА КНОПКА СБРОСА) |
||||||||
|
022 |
RESET AND REWIND ON (ВКЛЮЧЕНЫ |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
ПЕРЕЗАГРУЗКА И ПЕРЕМОТКА) |
||||||||
|
023 |
EMERGENCY STOP ON |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
(ВКЛЮЧЕНА АВАРИЙНАЯ ОСТАНОВКА) |
||||||||
|
024 |
RESET ON |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
|
(ВКЛЮЧЕНА ПЕРЕЗАГРУЗКА) |
||||||||
|
025 |
STOP MOTION OR DWELL |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
|
(ОСТАНОВКА ИЛИ ЗАДЕРЖКА) |
||||||||
Ввод сигнала аварийной остановки Ввод сигнала внешней перезагрузки MDI кнопка перезагрузки включена Ввод перезагрузки и перемотки
Возникновение сигнала тревоги, относящегося к сервосистеме Смена режима или блокировка подачи Остановка единичного блока
|
Номера диагностики 030 и 031 отображают состояния сигнала тревоги TH |
||
|
Ном. |
Отображение |
Описание |
030CHARACTER NUMBER TH DATA (ДАННЫЕ TH О ЧИСЛЕ СИМВОЛОВ)
Положение символа, который вызвал сигнал тревоги ТН, отображается в виде числа символов от начала блока при сигнале тревоги ТН
|
031 |
TH DATA (ДАННЫЕ TH) |
Считайте код символа, который вызвал сигнал |
|
тревоги TH |
496
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
-
01-05-2011, 01:49 PM
#1

Registered
- Join Date
- Dec 2009
- Posts
- 41
Fanuc 15M — Feedrate Override Knob Disabled?
I have a Niigata HN80C with a Fanuc 15M controller. It appears the feedrate override switch is disabled in the controller. The controller is seeing the switch change and the binary numbers are changing in the controller but the feed rate is not changing during a program. Does anybody know how the feedrate override can be disabled and more importantly how it can be turned back on? Thanks.
-
01-05-2011, 08:52 PM
#2
Registered
- Join Date
- Nov 2010
- Posts
- 0
There is an M code for this on some machines to stop operators messing with feedrate and spindle overrides in program, Rapid traverse cannot be locked out. Check the M code listing and also for operator settings or keep relay options.
-
01-06-2011, 03:31 AM
#3
Gold Member
- Join Date
- Jun 2008
- Posts
- 1511
Does this happen in all programs or just some of them? I don’t have any documents here at home but there is a #3000 variable that will disable the feed override. This is a shot in the dark but IIRC it may be #3010 set to 1 will disable the over ride and set to 0 will allow the override. I used this on a product line that I set up so the operators could not override during the cut. Then I enabled it right after the cut so anything else done on the machine you can override. I can check tomorrow and get back to you when I get time. If you can’t wait I know that I have posted this variable once before in a thread god only knows when but a search for #3000 with my name may find the thread for you.
Stevo
-
01-06-2011, 01:44 PM
#4
Registered
- Join Date
- Feb 2006
- Posts
- 1770
It is #3004 on 0i, possibly different on your control.
But, this variable starts with 0 in a new machining session, enabling feed override. Possibly, it is being disabled by your program.
See the attachment for more details.
-
01-06-2011, 02:58 PM
#5
Gold Member
- Join Date
- Jun 2008
- Posts
- 1511
Sinha,
You are correct. It is the same on the 15series as it is the Oi series. I just double checked this morning.Ktmrider,
Check to see if this is being used anywere in your programs. Especially in any macros that might be running. I also think that once this is active it stays active so you may want to try setting #3004=0 in MDI mode. If it is set to 2 then it will disable the override.Stevo
-
06-13-2012, 01:49 AM
#6
Registered
- Join Date
- Jun 2012
- Posts
- 0
feedrate override
there is an M code that is used on some controls to disable the feed-rate override…i think it is M49 to disable it and M48 to cancel.

Topic: feedrate 0 during program run (Read 1935 times)
0 Members and 1 Guest are viewing this topic.
Hi guys,
i just read through a bunch of topics, but … probably I am just too stupid  … couldn’t find anything regarding my problem:
… couldn’t find anything regarding my problem:
We have 2 Mach3 driven wood cnc machines and a DMG and a HAAS for metal works.
At both metal machines I can do 2 things while a program (G-Code) is running:
1: Set the feedrate to 0, so the program «stops» but the spindle runs
2: Press pause, which causes an IMMEDIATE pause.
So I tried to setup any of the both options with Mach3, but somehow I do not find a proper solution.
If I override the feed rate in the feedrate DRO to 0, I get an error saying (cannot perform move with 0 feedrate) or similar
If I press pause, Mach performs the buffered moves before it stops (our wood CNC is 3m long…)
I know I can it the STOP button for an immediate stop, but there is no simple way to «restart» as (I assume) the path precalculation will also be interrupted and….there seems to be not option to automatically restart the spindle.
Hope this is written understandable enough
Thanks for any help I can get.

Logged
Mach3 is a buffered system, meaning the moves are sent to the machine ahead of time. So there’s no way for the feedhold to work like you want.
Logged
Thanks for your quick answer.
So, just to understand…how comes that a STOP works immediately then ?
Asking because when I hit STOP the driver (also a MACH component) stops immediately and it is sufficient to scroll back just one line and the system can continue, whereas the feed hold «buffer» seems to be at least multiple lines.
And (sorry for asking) if it is a buffered system…it should then be able to handle 0 Feedrate without throwing an error.
Logged
tested on my PP test machine.
to put 0% in the feedrate override is no Problem.
Logged
anything is possible, just try to do it.
if you find some mistakes, in my bad bavarian english,they are yours.
Hi,
a ‘Stop’ command aborts the buffer, whatever moves are in it are lost. The machine looses reference. To continue you need to re-reference and
dry-run to the line prior to that that was executing when the ‘Stop’ occurred.
Look on the Diagnostics Tab and you’ll see the number of look-ahead lines. Typically about 0.2 to 0.5 seconds worth. You can reduce the buffer and
get less overrun on <FeedHold> but risk the buffer running out, at which Mach stalls, and probably the steppers stall so loosing reference.
Windows is not a realtime operating system and so you cannot guarantee that it will provide service/data at a given time or rate. There are realtime
operating systems which can be relied on to deliver service and/or data at given times but they cannot run Windows software.
Mach is one of the more successful attempts to get Windows (a non realtime system) to control a CNC machine which demands a realtime controller.
Buffering is one of the easier solutions, other methods are expensive which defeats the purpose of Mach.
Craig
Logged
‘I enjoy sex at 73…..I live at 71 so its not too far to walk.’
ok, got it. Thanks for your input. Just one question to TPS: If I enter any value in the FRO, nothing happens at all. After hitting return, the previous value is back. I assume FRO is read only. Did you put 0 into the feedrate DRO ? And was the effect immediate like with Spindle Speed ? I just tried with the roadrunner.tap file. The error occurs. I tried the same with ball.tap. Error does not occur.
Logged
just tested with cross.tap. When I enter 0 into FR DRO I get the message «Cannot do G1 with 0 feedrate: Block = G1 X….» and the program interrupts after a few lines. If I then enter a value > 0 into FR DRO the program still pauses until I hit Cycle Start. Strange: The FR DRO does accept values only with a huge delay or one better: If I enter 100 (cross.tap runs G1 with 5000) it slows down after some lines (probably buffer). Once a Gcode with F5000 occurs it keeps the 100 in the DRO even if the machine is running at 5000. So…anyway…it seems I have to live with no immediate pausing. TPS: Thanks to bavaria from bavaria :-)… and thanks to the rest of you guys
Logged
Are you using the parallel port, or a motion controller? It could be an issue with a motion controller.
Logged
csmio/ip on the productive machine. But I ran the last tests (previous posts) on a parallel port machine
Logged
just read what i have written!?
not the fro dro, the override fro dro,smal difference.
Logged
anything is possible, just try to do it.
if you find some mistakes, in my bad bavarian english,they are yours.