Погрешностью измеренияназывается
отклонение результата измерения от
истинного значения измеряемой величины
= Х
— ХИ,
(3.1)
где - абсолютная
погрешность измерения; Х — значение,
полученное при измерении; ХИ, —
истинное значение измеряемой величины.
Погрешности измерений принято делить
на систематические и случайные. При
измерении эти погрешности проявляются
совместно и образуют нестационарный,
случайный процесс и деление погрешностей
на систематические и случайные является
относительным [4].
Так как случайные и систематические
погрешности при повторных измерениях
ведут себя различно, отличаются и методы
их уменьшения.
Общим методом уменьшения погрешностей
является конструктивно- технологический
метод, основанный на выявлении и
устранении причин и источников
возникновения погрешностей. Примерами
использования такого метода являются:
термостатирование прибора (для исключения
температурной погрешности), применение
экранов и фильтров (для уменьшения
погрешностей от влияния электромагнитных
полей, наводок и др.), применение
искусственного старения (для уменьшения
прогрессирующей погрешности от старения
элементов), рациональное расположение
средств измерений по отношению друг к
другу, к источнику влияющих воздействий
и к объекту исследования (например,
магнитоэлектрические приборы должны
быть удалены друг от друга) и др. Во
многих случаях использование данного
метода для достижения требуемой
точности измерения встречает большие
затруднения и может привести к резкому
возрастанию стоимости средств измерений.
Более широкое применение получили
методы уменьшения погрешности измерений,
основанные на введении структурной и
(или) временной избыточности, т. е. на
введении дополнительных средств
измерений (измерительных преобразователей,
приборов и др.) и (или) выполнении
дополнительных измерений, результаты
которых обрабатываются по определенному
алгоритму [2].
Рассмотрим методы, применяющиеся для
уменьшения случайных и систематических
погрешностей.
3.1. Методы уменьшения случайных погрешностей
Случайная погрешность измерения— это составляющая погрешности измерения,
изменяющаяся случайным образом при
повторных измерениях одной и той же
величины.
Случайные погрешности нельзя заранее
выявить и устранить до и в процессе
измерения. Они могут быть уменьшены при
многократных наблюдениях одной и той
же величины, фильтрацией погрешностей
и др.
Усреднение результатов многократных
наблюденийпри постоянстве значения
измеряемой величины является наиболее
эффективным методом уменьшения случайной
погрешности измерения [2]. При проведении
многократных (n) наблюдений одного и
того же значения физической величины
во многих случаях в качестве результата
измерения выбирается среднее значение
результатов наблюдений. В этом случае
среднее квадратическое отклонение
результата измерения уменьшается вn
раз [5].
 Эффективным
Эффективным
способом уменьшения действия помех, а
следовательно, и случайной погрешности
является фильтрация [6]. Целью
фильтрации является получение оптимальной
оценки измеряемой величины. Погрешность
оценки представляет функцию времени.
В качестве критерия оптимальной оценки
используют некоторый функционал от
погрешности оценки на временном интервале
наблюдения (например, средний квадрат
погрешности). Для реализации оптимальной
фильтрации необходима априорная
информация о характеристиках измеряемой
величины и помехи (случайной погрешности)
[2]. Различают линейную и нелинейную
фильтрацию. Следует отметить, что в
средствах измерения линейная фильтрация
реализуется более просто, чем нелинейная
и применяется чаще. При правильном
выборе фильтра погрешность от действия
помех (случайная погрешность) становится
минимальной.
Рассмотрим оптимальную линейную
фильтрацию. Пусть в средстве измерения
действует аддитивная смесь полезного
сигнала и помехи со спектральными
плотностями SC()
и SП(). Сигнал
и помеха стационарны и некоррелированы.
Полезный сигнал менее широкополосен,
чем помеха, и его спектральная плотность
падает с ростом частоты.
Фильтр имеет линейную фазочастотную
характеристику()
= -tO. В этом
случае оптимальный фильтр будет иметь
передаточную характеристику [6]
КОПТ(j)
= SC()/[(SC()
+ SП())] e-j
to. (3.2)
Минимальное значение погрешности
фильтрации
min2[] = (1/)
[SC()SП()/[(SC() + SП())]d.
(3.3)
0
Случайная погрешность не исключается
из результата измерения полностью, но
может быть существенно уменьшена.
При выборе прибора для тех или иных целей измерения необходимо внимательно рассмотреть и проанализировать ряд факторов и оптимизировать их по совокупности всех технических данных и характеристик.
Основные факторы, влияющие на выбор измерительного прибора следующие:
1. Возможность измерить исследуемый сигнал.
2. Тип параметра, который надо измерить.
3. Метод измерения (прямой, косвенный, совокупный, совместный и др.).
4. Продолжительность измерений.
5. Удобство прибора для проведения измерения (габаритные размеры, масса).
6. Нужная точность измерений.
7. Стоимость прибора.
8. Допускаемая погрешность измерений.
9. Климатические условия применения прибора.
10. Требования к форме фиксации результатов измерения (аналоговая, цифровая, аналого-цифровая и др.).
11. Предполагаемая форма использования прибора (автономно, в составе автоматизированной системы и др.).
При всяком измерении неизбежны обусловленные разно-образными причинами отклонения результата измерения от истинного значения измеряемой величины. Эти отклонения называют погрешностями измерений.
Погрешности измерений классифицируют по виду (абсолютная, относительная, случайная и др.), причинам возникновения, характеру проявления и др. Разумеется, что в процессе измерений необходимо учитывать все виды возникающих погрешностей и, поняв их причину, стремиться их уменьшить. Остановимся на методах уменьшения (исключения) систематических погрешностей измерения. Измерения проведены правильны, если систематические погрешности в их результатах близки к нулю.
Для определения и исключения систематических погрешностей используют методы: теоретического анализа, замещения, компенсации погрешности по знаку, статистический, различных измерений, образцовых сигналов, метод введения поправок и поправочных множителей.
Если исключить систематические погрешности не удается, то их уменьшают, устраняя причины их возникновения, регулируя средства измерения при поверке и перед началом измерения, применяя специальные методы измерения и др.
В состав современных измерительных приборов включают микропроцессоры, которые позволяют автоматически на-ходить значения систематической погрешности и исключать ее.
Метод теоретического анализа состоит в том, что систематическую погрешность можно рассчитать на основании известных характеристик используемых приборов или особенностей метода измерения, т. е. по формулам. Так, можно определить систематическую погрешность прибора, обусловленную собственным потреблением мощности, если известно его входное сопротивление и т. д.
Метод замещения заключается в том, что измеряемую величину замещают известной величиной, воспроизводимой мерой. Например, измеряют ослабления аттенюатора с помощью образцового переменного аттенюатора.
Метод компенсации погрешности по знаку основан на том, что если источник погрешности имеет направленное действие (например, погрешности от влияния постоянных магнитных полей, термо-эдс и др.), то измерения проводят так, чтобы систематическая погрешность входила в результаты измерений дважды, но с противоположными знаками.
Статистический метод состоит в том, что для обработки результаты измерений разбивают на несколько независимых групп наблюдений. Разница между групповыми средними и групповыми дисперсиями (средними в группе) указывают на наличие систематической погрешности и позволяет вычислить ее.
Метод различных измерений позволяет обнаруживать систематические погрешности, источник которых неизвестен. Для этого величину измеряют несколькими различными методами, разными измерительными приборами, при различных условиях. В этом случае необходимо, чтобы используемые для измерений приборы имели примерно равные собственные погрешности.
Метод образцовых сигналов состоит в сравнении подаваемых на вход измерительного устройства сигналов: измеряемого и образцового такого же рода, что и измеряемый. Разность между ними определит систематическую погрешность.
Метод введения поправок и поправочных множителей. Поправкой называют значение величины, одноименной с измеряемой, прибавляемое к полученному при измерении значению с целью исключения систематической погрешности. Поправка численно равна абсолютной систематической погрешности, но имеет обратный знак. Поправки задаются в виде графиков, таблиц или формул.
Исключить систематическую погрешность измерения можно также путем умножения результатов измерения на поправочный множитель, который из-за малости систематических погрешностей обычно близок по значению к единице. Полагается, что поправки и поправочные множители предварительно определены при поверке средств измерений.
Снизить систематические погрешности можно термостатированием и термоизоляцией отдельных узлов или всего измерительного прибора, проведением измерений в термостатированных помещениях (для исключения температурной погрешности), применением экранов для защиты от влияния электромагнитных полей, использованием стабилизированных источников питания, амортизацией прибора, удалением его от источников возможного воздействия, от объектов измерений.
Уменьшению систематической погрешности прибора способствует регулировка средств измерения при поверке и перед началом измерения. Сюда входят проверка установки указателя прибора в нулевое положение, правильность положения самого прибора, его расположения относительно окружающих объектов и др.
Существенно уменьшает влияние систематической погрешности перевод ее в случайную. Так, если измерить некий параметр приборами несколько раз, а затем вычислить среднее арифметическое всех результатов, то значение погрешности существенно уменьшится.
Систематические погрешности при косвенных измерениях определяются по значениям систематических погрешностей непосредственно измеряемых независимых величин.
С уменьшением погрешности измерений повышается их точность. Точностью измерений называют их качество, отражающее близость полученного значения величины к ее истинному значению. Следует отметить, что для конкретных условий и целей измерения существует обычно некий рациональный уровень точности, который нецелесообразно превышать из-за усложнения процесса измерений и удорожания измерительных
приборов.
На практике для различных целей ежедневно и ежечасно выполняют большое количество измерений физических величин и, в частности, электротехнических. В интересах народного хозяйства страны необходимо, чтобы результаты этих измерений (имеются в виду измерения одинаковых величин), полученные в разное время и в различных местах с помощью измерительных средств, были бы равны или отличались на некоторое заданное значение.
Иными словами, должно существовать единство измерений.
Единство измерений — это состояние измерений, при котором их результаты выражены в узаконенных единицах, а погрешности известны с заданной вероятностью. Вопросами теории и практики обеспечения единства и необходимой точности измерений занимается метрология.
Метрология — наука об измерениях, методах и средствах обеспечения их единства и способах достижения требуемой точности. В методологическую основу метрологии — Государственную систему стандартов, обеспечивающую единство измерений— входит более 100 стандартов, регламентирующих: единицы физических величин; методы и средства передачи размеров единиц физических величин рабочим средствам измерений; номенклатуру и способы выражения погрешностей средств измерений; поверку используемых средств измерений для создания заданного уровня надежности метрологических характеристик; номенклатуру и способы представления результатов измерений.
В заключение отметим, что к систематическим погрешностям относятся: инструментальные, метода измерений, установки прибора, считывания.
Под инструментальной понимается погрешность применяемых средств измерений, вызванная несовершенством их изготовления.
Погрешности метода измерений связаны с ошибочностью или недостаточностью разработки теории метода измерений или с упрощениями, допущенными при проведении измерений.
Погрешность установки прибора может быть вызвана: неправильным выбором места измерения; влиянием неблагоприятных внешних условий (вибрации, температуры, влажности) ; удаленностью объекта измерения от приборов обработки измерительных сигналов; небрежной установкой прибора (например, не по отвесу или уровню).
Погрешности считывания, возникающие при не автоматизированных измерениях, объясняются индивидуальными особенностями наблюдателя.
Точность и продолжительность измерений при коррелированной погрешности
При использовании описанной в первой части статьи процедуры усреднения результатов измерений никак не учитывалось, за какое время выполняется серия измерений, поскольку предполагалось, что погрешность является некоррелированным (белым) шумом. Далее будут рассмотрены эффекты, которые возникают в реальных условиях, когда шум измерений является цветным. Попутно станет ясно, почему точные измерительные приборы работают медленно.
Измерительные каналы средств автоматизации обычно являются частью систем, компоненты которых распределены в пространстве и соединены между собой кабельными линиями. Поэтому на них воздействует весь спектр помех, имеющихся в конкретной электромагнитной обстановке. Основными компонентами случайной погрешности, вызванной помехами, являются белый шум, фликкер-шум (1/f-шум) и относительно узкополосные помехи от работающего электрооборудования, передатчиков и естественных источников электромагнитного излучения.
Пример одной реализации белого шума (некоррелированной погрешности измерений) показан на рис. 3 б (см. первую часть статьи в «СТА» 4/2009). Характерной его особенностью является то, что при изменении масштаба по оси времени внешний вид графика остаётся прежним, уменьшается только среднеквадратическое значение шума вследствие уменьшения ширины временного окна наблюдения.
В отличие от него, график реализации коррелированного шума изменяет свой внешний вид в зависимости от ширины окна наблюдения (см. рис. 3 а в первой части статьи). Коррелированный шум с заданной автокорреляционной функцией можно получить из белого, пропустив его через фильтр с заранее рассчитанной передаточной характеристикой.
Многократные измерения с усреднением всегда выполняются на конечном интервале времени Δt. Если случайная погрешность не коррелирована, то её математическое ожидание равно нулю и не зависит от величины интервала (Δt1, Δt2 на рис. 3 б) и момента начала измерения. Поэтому усреднение по формуле (3) может дать неограниченное уменьшение случайной составляющей погрешности измерений с ростом числа измерений.
Если же этот интервал усреднения Δt меньше времени корреляции (см. рис. 3 а), то на каждом отдельно взятом интервале усреднения Δt1 или Δt2 получим разные значения погрешности. В отличие от белого шума погрешность среднего арифметического при увеличении количества измерений будет стремиться к некоторому значению (xср1, xср2 на рис. 3 а), отличному от нуля. Поэтому формула (3) перестаёт быть справедливой.
Поскольку в реальных измерениях всегда присутствует, по крайней мере, фликкер-шум (это является фундаментальным законом природы), который делает шум измерений отличным от белого, то усреднение измерений не может снизить случайную составляющую погрешности до нуля. Кроме того, в цифровых средствах измерений всегда присутствует помеха с частотой тактового генератора, которая придаёт окраску белому шуму.
Предположим, что измерения выполняются в течение конечного промежутка времени T (то есть во временно́м окне шириной T) и за это время выполняется N измерений с равными интервалами τ = T/N между ними, после чего находится среднее значение xср (1). Предположим для простоты, что измеряемая величина равна нулю, то есть в результате измерений мы получаем только величину случайной погрешности, которую обозначим x(t).
Найдём среднеквадратическое отклонение погрешности xср. Для этого проведем множество измерений сериями по N, выполняя усреднение в пределах каждой серии. В результате получим множество значений xср.

Измерения будем выполнять в моменты времени 0, τ, 2τ, … (рис. 4 а). Обратим внимание, что измерение в моменты времени 0, τ, 2τ, … эквивалентно измерению в один и тот же момент времени t (рис. 4 б), если использовать линии задержки, которые будут сдвигать реализацию случайного процесса на 0, τ, 2τ, … . Поэтому результат усреднения измерений, выполненных за время T = (N–1)τ, можно записать в виде:

где t — момент времени выполнения измерений.
Функцию xср(t) можно описать с помощью спектральной плотности мощности, для чего сначала найдём её Фурье-изображение:
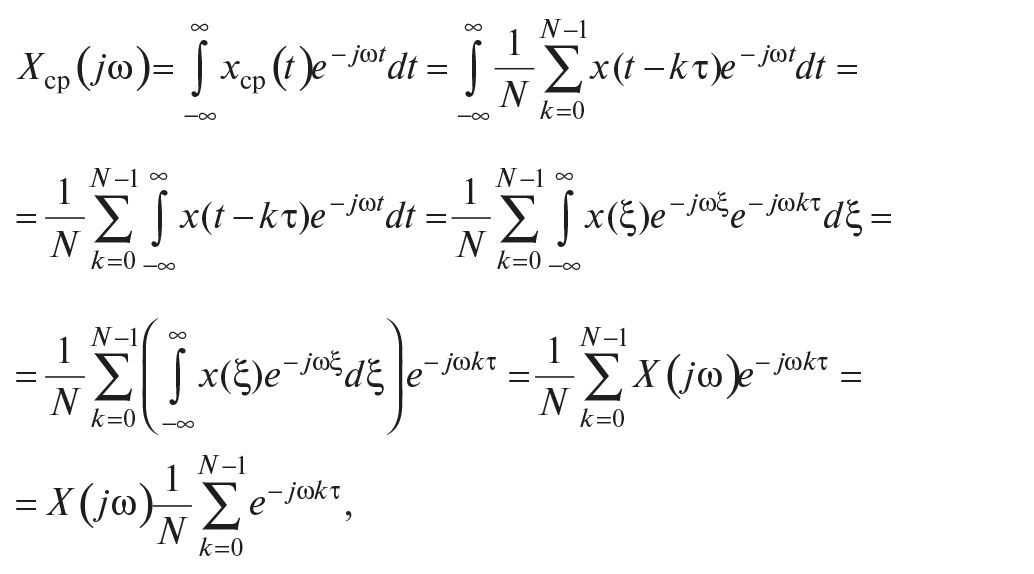
где сначала использована замена переменной t = ξ + kτ, затем введено обозначение
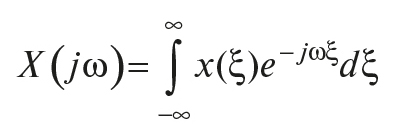
Фурье-изображения рассматриваемой случайной погрешности x(t).
Полученное выражение можно записать в виде:

где

Таким образом, процесс усреднения можно рассматривать как прохождение случайного процесса через усредняющий фильтр с передаточной характеристикой (9). Поскольку вследствие симметрии Фурье-изображений в (8) относительно оси ординат Xср(–jω) = W(–jω)X(–jω), то, умножая левую и правую часть этого выражения на соответствующие части из выражения (8), получим:
Xcp(jω)Xcp(−jω) =W(jω)W(−jω)X(jω)X(−jω),
откуда
|Xcp(jω)|2 = |W(jω)|2|X(jω)|2.
Пользуясь определением спектральной плотности мощности, из последнего выражения получим:
Scp(ω) = |W(jω)|2S(ω),
где S(ω) и Sср(ω) — спектральные плотности мощности случайной составляющей погрешности до процесса усреднения и после.
Рассмотрим передаточную функцию усредняющего фильтра (9). Используя формулу суммы членов геометрической прогрессии
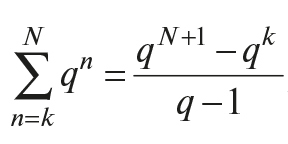
её можно записать в виде:

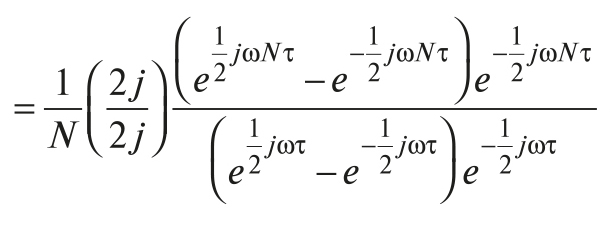
Пользуясь соотношением [exp(jx) – exp(–jx)]/2j = sin(x), окончательно получим:
Выражение (10) является передаточной функцией цифрового sinc-фильтра [3] (список литературы в первой части статьи), то есть усреднение измерений, полученных в N точках, отстоящих друг от друга на τ, эквивалентно цифровой фильтрации в прямоугольном окне шириной Nτ. В результате фильтрации ослабляются спектральные составляющие погрешности измерений, расположенные выше граничной частоты фильтра.
Дисперсию погрешности измерений можно найти, интегрируя спектральную плотность мощности погрешности по всей полосе частот, от 0 до ∞:
Это выражение справедливо для погрешности с любой спектральной плотностью. Предположим сначала, что погрешность является белым шумом, то есть S(ω)=S0=const. Тогда, подставляя (10) в (11), получим

где fд = 1/τ — частота дискретизации (то есть измерений), откуда
σср=σх/√N
Это выражение совпадает с ранее полученным выражением (3), поскольку использовано предположение о преобладании белого шума. Таким образом, усреднение N однократных измерений, выполненных в N временных точках, отстоящих друг от друга на τ, при белом шуме уменьшает погрешность в √N раз.
В случае коррелированных измерений (цветного шума) необходимо использовать формулу (7). В неё входят коэффициенты корреляции rij, которые можно найти следующим образом. Предположим, что случайная составляющая погрешности измерений обусловлена смесью белого шума со спектральной плотностью S0 и фликкер-шума со спектральной плотностью , где c — константа, определяемая экспериментально (рис. 5).

Тогда спектральную плотность мощности погрешности можно выразить как

Найдём частоту f0, на которой оба компонента шума одинаковы (рис. 5): S0=c/f0, откуда f0=c/S0.
При f → 0 спектральная плотность мощности (12) стремится к бесконечности, поэтому интеграл (11) для фликкер-шума расходится. Однако если учесть, что измерительные каналы систем автоматизации имеют режим автокалибровки, то низкочастотные компоненты фликкер-шума будут подавлены. Это позволяет выбрать ненулевую нижнюю границу спектра фликкер-шума, равную fн. Если калибровка в процессе эксплуатации прибора не выполняется, то величина fн будет определяться межповерочным интервалом средства измерений.
Для получения корреляционной матрицы сначала найдём функцию автокорреляции случайной погрешности Rx(τ), используя теорему Винера-Хинчина и преобразование Фурье:

где τ — интервал времени между отдельными измерениями (сечениями случайного процесса). Здесь и далее мы используем односторонний энергетический спектр. Пределы интегрирования выбраны в предположении, что в реальных средствах измерений полоса частот погрешностей сверху ограничена верхней граничной частотой полосы пропускания измерительного канала fв, а снизу — межкалибровочным интервалом Tмк. Поэтому в спектре помехи не могут существовать компоненты с частотой ниже fн = 1/Tмк. Интегрируя (13) и используя дисперсию
нормированную на Df автокорреляционную функцию можно записать в виде:
где Ci(·) — интегральный косинус,
γ = 0,5772… — постоянная Эйлера.
Графики функции r(τ) при типичной для измерительных модулей систем промышленной автоматизации граничной частоте fв = 10 Гц [3], разных fн = 1/Tмк (то есть разных интервалах между калибровками Tмк) и при пересечении графиков с/f и S0 в точке S0 = 1 Гц показаны на рис. 6.

Как следует из рисунка, наиболее сильная корреляция между отдельными измерениями существует при измерениях с интервалом менее 10 с. При интервале между калибровками более 1 мин корреляция шумовой погрешности является относительно слабой; это характерно для приборов с автоматической калибровкой, которые калибруются, например, в момент включения или перед каждым измерением. Сильная корреляция погрешности (более 0,7) свойственна приборам, которые калибруются только во время периодической поверки (например, с интервалом 2 года и более).
Качественное объяснение приведённых графиков состоит в следующем. С увеличением интервала между калибровками растет доля спектральной плотности мощности погрешности, приходящаяся на низкочастотную часть энергетического спектра. Поэтому увеличивается вероятность того, что все измерения, сделанные за время, которое много меньше периода между калибровками, будут одинаково смещены в одну сторону.
Предположим, что усреднение по множеству значений случайной величины (погрешности измерений) в сечении случайного процесса можно заменить усреднением по времени (то есть случайный процесс является эргодическим). Тогда в качестве коэффициентов корреляции можно использовать значения автокорреляционной функции (14) в моменты измерений ti, tj, то есть rij = rf(τij), τij = ti – tj. Поскольку автокорреляционная функция зависит только от интервала между моментами измерений, то при одинаковых интервалах двойную сумму в (7) можно записать в виде:

где k — порядковый номер измерения; T — интервал времени между соседними измерениями. Поэтому выражение (7) можно записать в виде:

Для практических оценок эту формулу можно ещё более упростить. Как следует из рис. 6, при больших значениях автокорреляционной функции и малом количестве отсчётов можно принять r(τ) = r0 » const. Например, при интервале между измерениями 20 с и количестве измерений 10 коэффициент корреляции для верхней кривой на рис. 6 изменяется менее чем на 5%. Для этих случаев выражение (15) упрощается:

На рис. 7 показан график, построенный в соответствии с формулой (16).

Погрешность при наличии узкополосных помех
Рассмотрим теперь влияние на погрешность измерений узкополосных помех из сети с частотой 50 Гц и от цифровой части средства измерений. Предположим, что среднеквадратическое отклонение помехи определяется её основной гармоникой:
e(t) = A cos(2πfst), (17)
где fs = 1/Ts, Ts — период колебания, A — амплитуда. Поскольку измерения выполняются в дискретные моменты времени с постоянным интервалом T, то величина погрешности измерений будет зависеть от соотношения Ts, T и количества измерений.
Рассмотрим сначала погрешность, вызванную помехой с частотой 50 Гц. Многократные измерения с периодом T эквивалентны дискретизации помехи в моменты измерений. Если период измерений стабилен, то помеха переносится в низкочастотную область благодаря алиасному (стробоскопическому) эффекту. Представим моменты измерений в виде:
tk = (MTs + δTs)k, (18)
где M = 1, 2, … — целое число, 0 < δ < 1 — доля периода, k ∈ [0,2,… N] — порядковый номер измерения. Тогда уравнение помехи (17) после дискретизации можно записать в виде:
e(t) = A cos(2πfs(MTs + δTs)k) = A cos(2πfsδTsk).
Здесь использована известная формула тригонометрии для косинуса суммы углов и соотношение cos(2πfsMT) = 1.
Количество измерений KT, приходящихся на период алиасной помехи, можно найти из соотношения 2πfsσTsKT = 2π, откуда KT = 1/σ. Интервал времени между измерениями, как следует из (18), равен T = MTs + σTs , поэтому период алиасных колебаний будет:

Таким образом, в результате измерений значений помехи со стабильным интервалом Ts её период увеличивается после дискретизации в (M + σ)/σ раз; во столько же раз падает частота.
Процесс усреднения результатов многократных измерений, выполненных с интервалом T, эквивалентен прохождению сигнала через дискретный sinc-фильтр [3]. Поэтому эффективность ослабления помехи будет зависеть от соотношения ширины окна усреднения (то есть полосы пропускания фильтра), частоты алиасной помехи fа = 1/Tа и частоты fа – 1/T, полученной вследствие размножения копий спектра алиасной помехи при её дискретизации.
Однако, как следует из (19), при σ → 0 (то есть когда на интервале измерений укладывается целое число периодов помехи) fа → 0 и частота помехи становится ниже граничной частоты усредняющего фильтра, а в пределе получаем постоянное смещение на уровень, величина которого зависит от случайной фазы помехи в момент измерений. Поэтому в общем случае ослабить помеху из сети 50 Гц с помощью усреднения невозможно. Теоретически такое ослабление было бы возможно только при искусственной синхронизации процесса измерений с сигналом помехи или при измерениях в некоррелированные случайные моменты времени.
Рассмотрим теперь случай, когда погрешность измерений вызвана высокочастотной помехой от цифровой части измерительной системы. Для неё Ts имеет порядок долей микросекунды. Разброс (нестабильность) меток времени в компьютере составляет десятые и сотые доли секунды, в ПЛК с операционной системой реального времени — десятки микросекунд [3]. Поэтому измерения помехи с частотой более 1 МГц (период менее 1 мкс) не могут быть периодическими. Величина помехи в момент измерения является случайной величиной и определяется законом распределения нестабильности тактирования pT(T) в компьютере или контроллере. К сожалению, корреляционная функция периода измерений с помощью компьютера или контроллера является неисследованной. Если предположить, что период измерений описывается моделью белого шума, то результат дискретизации помехи также будет белым шумом, который учитывается в погрешности измерений формулой (15).
Выводы
Из изложенного в данной статье можно сделать следующие выводы.
-
Увеличение точности путём усреднения результатов многократных измерений ограничено не только систематической составляющей погрешности, но и спектральным составом шума измерений. Фликкер-шум, спектральная плотность мощности которого растёт с понижением частоты, ограничивает возможность увеличения точности путём усреднения.
-
Наиболее практичным способом устранения погрешности, обусловленной фликкер-шумом, является периодическая автокалибровка средства измерений.
-
Погрешность усреднения в случае некоррелированной погрешности не зависит от ширины временного окна Nτ, а зависит только от количества отсчётов N.
-
Усреднение может применяться только при постоянном значении измеряемой величины. В противном случае нужно учитывать динамическую погрешность или уменьшать ширину окна усреднения.
-
Усреднение является разновидностью цифровой фильтрации методом «скользящего среднего», поэтому может быть использовано и при наличии шумов объекта измерений. Однако этой проблеме посвящена специальная литература.
-
Информация, необходимая для оценки функции автокорреляции, обычно отсутствует. Для её получения необходимо измерять спектральную плотность погрешности автоматизированными методами измерений [3], что является довольно трудоёмкой задачей. Поэтому предложенная методика оценки погрешности при коррелированном шуме может найти применение в редких случаях, когда целью является получение максимального количества информации, несмотря на трудозатраты на её получение. ●
Обновлено: 22.06.2023
Метрология — наука об измерениях, методах и средствах обеспечения их единства и способах достижения требуемой точности.
· теоретическая (фундаментальная) — раздел метрологии, предметом которого является разработка фундаментальных основ метрологии.
· законодательная метрология — раздел метрологии, предметом которого является установление обязательных технических и юридических требований по применению единиц величин, эталонов, методов и средств измерений, направленных на обеспечение единства и требуемой точности измерений.
· практическая (прикладная) — раздел метрологии, предметом которого являются вопросы практического применения разработок metrology теоретической метрологии и положений законодательной метрологии.
Основные функции метрологии:
— создание общей теории измерений;
— образование единиц физических величин и систем единиц;
— разработка методов и средств измерений, методов определения точности, основ обеспечения единства и единообразия средств измерений;
— создание эталонов и образцовых средств, проверке мер и средств измерений.
Важнейшей задачей метрологии является обеспечение единства измерений,
Единство измерений—состояние измерений, характеризующееся тем, что их результаты выражаются в узаконенных единицах, размеры которых в установленных пределах равны размерам единиц, воспроизводимых первичными эталонами, а погрешности результатов измерений известны и с заданной вероятностью не выходят за установленные пределы.
Единство измерений достигается путем точного воспроизведения и хранения в специализированных организациях установленных единиц физических величин и передачи их размеров применяемым на практике СИ. Воспроизведение единицы физической величины осуществляется в результате операций по материализации единицы физической величины с помощью государственного эталона.
Передача размера единицы — приведение размера единицы физической величины, хранимой поверяемым средством измерений, к размеру единицы, воспроизводимой или хранимой эталоном, осуществляемое при их поверке (калибровке). Размер единицы передается от более точных средств измерений к менее точным.
Хранение единицы — совокупность операций, обеспечивающих неизменность во времени размера единицы, присущего данному средству измерений.
Определение измерения?
Измерение физической величины—совокупность операций по применению технического средства, хранящего единицу физической величины, обеспечивающих нахождение соотношения (в явном или неявном виде) измеряемой величины с ее единицей и получение значения этой величины.
Измерительная задача — задача определения значения физической величины путем ее измерения с требуемой точностью в заданных условиях измерений.
Объект измерения — тело (физическая система, процесс, явление и т.д.), которое характеризуется одной или несколькими измеряемыми физическими величинами.
§ Вал, у которого измеряют диаметр;
§ технологический процесс, во время которого измеряют температуру;
§ Положение корабля, координаты которого измеряют.
Область измерений — совокупность измерений физических величин, свойственных какой-либо области науки или техники и выделяющихся своей спецификой.
Примечание: Выделяют ряд областей измерений: механические, магнитные, акустические, измерения ионизирующих излучений и др.
Вид измерений — часть области измерений, имеющая свои особенности и отличающаяся однородностью измеряемых величин.
Пример:В области акустических измерений могут быть выделены как виды измерений: измерения амплитуды, частоты, фазы, акустического давления и др.
Принцип измерений — физическое явление или эффект, положенное в основу измерений.
1. Применение явления термо-ЭДС для измерения температуры.
2. Применение явления упругости материала для измерения его твёрдости.
3. Применение эффекта Допплера для измерения скорости.
4. Использование силы тяжести при измерении массы взвешиванием.
Метод измерений — прием или совокупность приемов сравнения измеряемой физической величины с ее единицей в соответствии с реализованным принципом измерений.
Методика выполнения измерений (МВИ) — установленная совокупность операций и правил при измерении, выполнение которых обеспечивает получение результатов измерений с гарантированной точностью в соответствии с принятым методом.
Погрешности измерения и методы их уменьшения?
Точность результата измерений—одна изхарактеристик качества измерения, отражающая близость к нулю погрешности результата измерения.
Примечание: Точность измерений тем или иным средством измерений (СИ) определяется их погрешностью. Высокая точность измерений соответствует малым погрешностям как систематическим, так и случайным.
Погрешность результата измерений—отклонение результата измерения от истинного (действительного) значения измеряемой величины.
· Погрешность не следует путать с ошибкой измерений, связанной с субъективными обстоятельствами.
Абсолютная погрешность измерения—погрешность измерения, выраженная в единицах измеряемой величины.
Относительная погрешность измерения—погрешность измерения, выраженная отношением абсолютной погрешности измерения к действительному или измеренному значению измеряемой величины.
Вагон массой 50000 кг измерен с абсолютной погрешностью ±50 кг, при этом относительная погрешность составляет: ±50/50000 = ±0,1%.
Примечание: Относительную погрешность в долях или процентах находят из отношений:
d = Dх/х, или d = Dх×100%/х,
где Dх — абсолютная погрешность измерений;
х — действительное или измеренное значение величины.
Систематическая погрешность — постоянная, или изменяющаяся по определенному закону при повторных измерениях одной и той же величины погрешность. Она может быть связана, например, с ошибкой в градуировке шкалы.
Постоянные погрешности—погрешности, которые длительное время сохраняют свое значение, например, в течение времени выполнения всего ряда измерений.
Периодические погрешности—погрешности, значение которых является периодической функцией времени или перемещения указателя измерительного прибора.
Случайная погрешность измерения—составляющая погрешности результата измерения, изменяющаяся случайным образом (по знаку и значению) при повторных измерениях, проведенных с одинаковой тщательностью, одной и той же физической величины.
В отличие от систематической ее нельзя исключить из результатов измерений, однако ее значение может быть уменьшено в результате специальных способов обработки результатов измерений, основанных на положениях теории вероятности и математической статистики.
Промах — погрешность результата отдельного измерения, входящего в ряд измерений, которая для данных условий резко отличается от остальных результатов этого ряда.
Примечание: Иногда вместо термина «промах» применяют термин грубая погрешность измерений
Общим методом уменьшения погрешностей является конструктивно- технологический метод, основанный на выявлении и устранении причин и источников возникновения погрешностей.
Примерами использования такого метода являются: термостатирование прибора (для исключения температурной погрешности), применение экранов и фильтров (для уменьшения погрешностей от влияния электромагнитных полей, наводок и др.), рациональное расположение средств измерений по отношению друг к другу, к источнику влияющих воздействий и к объекту исследования (например, магнитоэлектрические приборы должны быть удалены друг от друга) и др.
Во многих случаях использование данного метода для достижения требуемой точности измерения встречает большие затруднения и может привести к резкому возрастанию стоимости средств измерений.
Более широкое применение получили методы структурной и (или) временной избыточности, т.е. на введении дополнительных средств измерений (измерительных преобразователей, приборов и др.) и (или) выполнении дополнительных измерений, результаты которых обрабатываются по определенному алгоритму.
1. использовать более точное измерительное устройство
2. пригласить более квалифицированного специалиста
3. если измерение не единоразовое, увеличить количество измерений (циклов)
а что именно измеряется то?
Ну, если речь идёт о стрелочных приборах, то:
1. Установить зеркало под стрелкой — это обеспечит гарантированно вертикальный взгляд на стрелку.
2. Вообще исключить человеческий фактор из измерений, пользуясь электронными приборами.
Эти сведения нехило устарели, но в большинстве наших вузов они всё еще актуальны.
Смотря что измерять. Для того, чтобы уменьшить погрешность измерения какой-то величины, необходим посмотреть КАКОЙ измеряемый параметр дает максимальный вклад в результат погрешности.
На этот вопрос отвечает наука — метрология.
А если по простому — взять более точный прибор.
Уменьшение систематической погрешности.
Систематическая погрешность проявляется в виде смещения Хизм относительно Х. Может быть учтена введением поправки.
При ∆с ≈ 0 – измерения правильные.
Способы уменьшения ∆с:
· повышение класса точности прибора;
· использование метода замещения;
· изменение знака выходной величины и др.
Уменьшение случайной погрешности.
Случайная погрешность проявляется в виде разброса значений Хизм относительно Х. Может быть оценена в виде доверительного интервала.
· повышение класса точности СИТ (при однократных измерениях);
· проведение многократных наблюдений при помощи приборов высокой чувствительности.
2.4 Классы точности
Класс точности – нормированная метрологическая характеристика средства измерения, определяемая пределами допускаемых погрешностей, а также другими свойствами, влияющими на точность.
1. Приборы с Δад >> Δмлт
Класс точности: . Пример обозначения: 1,0
Пример 1: Предел измерения амперметра 10 А, класс точности 0,5. Определить абсолютную и относительную погрешности измерения тока 5 А.
Приборы с Δад >> Δмлт и резко неравномерной шкалой (Хн = lполн).
Класс точности: . Пример обозначения:
Пример 2: Определить абсолютную погрешность измерения сопротивления резистора, если показание омметра 500 Ом, а на отметке измерения 1 мм шкалы соответствует 10 Ом. Класс точности омметра
2. Приборы с Δмлт >> Δад
Класс точности: . Пример обозначения:
Пример 3: Счетчик электрической энергии зарегистрировал расход энергии 200 кВт-час. Определить абсолютную погрешность измерения энергии, если класс точности счетчика .
3. Приборы с Δад ~ Δмлт
Класс точности: . Пример обозначения: 1,0/0,5 .
Пример 4 Предел измерения вольтметра 50 В, класс точности 0,5/0,2. Определить погрешность измерения напряжения 20 В.
Пример 5: Первый ваттметр имеет предел измерения Wн1 = 750 Bт и класс точности K1 = 0,5; второй ваттметр – соответственно Wн2 =1000 Bт и K2 = 0,5/0,1. Выбрать прибор, обеспечивающий меньшую погрешность измерения мощности 500 Вт.
Меньшую погрешность дает второй ваттметр.
Лекция 3ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
3.1 Показатели точности измерений
Результат измерения – числовое значение, приписываемое измеряемой величине, с указанием точности измерения.
Численные показатели точности:
· доверительный интервал (доверительные границы) погрешности ΔР;
· оценка СКО погрешности S.
Правила выражения показателей точности:
· численные показатели точности выражаются в единицах измеряемой величины;
· численные показатели точности должны содержать не более двух значащих цифр;
А.Крылов: «Всякая неверная цифра – ошибка, а всякая лишняя цифра – половина ошибки»;
· наименьшие разряды значения измеряемой величины и численных показателей точности должны быть одинаковыми.
3.2 Представление результатов измерений
Результат измерения:
Пример: U = 105,0 В, Δ0,95 = ± 1,5 B или U = 105,0 ± 1,5 B.
Уменьшение систематической погрешности.
Систематическая погрешность проявляется в виде смещения Хизм относительно Х. Может быть учтена введением поправки.
При ∆с ≈ 0 – измерения правильные.
Способы уменьшения ∆с:
· повышение класса точности прибора;
· использование метода замещения;
· изменение знака выходной величины и др.
Уменьшение случайной погрешности.
Случайная погрешность проявляется в виде разброса значений Хизм относительно Х. Может быть оценена в виде доверительного интервала.
· повышение класса точности СИТ (при однократных измерениях);
· проведение многократных наблюдений при помощи приборов высокой чувствительности.
2.4 Классы точности
Класс точности – нормированная метрологическая характеристика средства измерения, определяемая пределами допускаемых погрешностей, а также другими свойствами, влияющими на точность.

1. Приборы с Δад >> Δмлт
Класс точности: . Пример обозначения: 1,0
Пример 1: Предел измерения амперметра 10 А, класс точности 0,5. Определить абсолютную и относительную погрешности измерения тока 5 А.
Приборы с Δад >> Δмлт и резко неравномерной шкалой (Хн = lполн).
Класс точности: . Пример обозначения:
Пример 2: Определить абсолютную погрешность измерения сопротивления резистора, если показание омметра 500 Ом, а на отметке измерения 1 мм шкалы соответствует 10 Ом. Класс точности омметра
2. Приборы с Δмлт >> Δад
Класс точности: . Пример обозначения:
Пример 3: Счетчик электрической энергии зарегистрировал расход энергии 200 кВт-час. Определить абсолютную погрешность измерения энергии, если класс точности счетчика .
3. Приборы с Δад ~ Δмлт
Класс точности: . Пример обозначения: 1,0/0,5 .
Пример 4 Предел измерения вольтметра 50 В, класс точности 0,5/0,2. Определить погрешность измерения напряжения 20 В.
Пример 5: Первый ваттметр имеет предел измерения Wн1 = 750 Bт и класс точности K1 = 0,5; второй ваттметр – соответственно Wн2 =1000 Bт и K2 = 0,5/0,1. Выбрать прибор, обеспечивающий меньшую погрешность измерения мощности 500 Вт.
Меньшую погрешность дает второй ваттметр.
Лекция 3ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
3.1 Показатели точности измерений
Результат измерения – числовое значение, приписываемое измеряемой величине, с указанием точности измерения.
Численные показатели точности:
· доверительный интервал (доверительные границы) погрешности ΔР;
· оценка СКО погрешности S.
Правила выражения показателей точности:
· численные показатели точности выражаются в единицах измеряемой величины;
· численные показатели точности должны содержать не более двух значащих цифр;
А.Крылов: «Всякая неверная цифра – ошибка, а всякая лишняя цифра – половина ошибки»;
· наименьшие разряды значения измеряемой величины и численных показателей точности должны быть одинаковыми.
3.2 Представление результатов измерений
Результат измерения:
Пример: U = 105,0 В, Δ0,95 = ± 1,5 B или U = 105,0 ± 1,5 B.
Обычно выделяют три группы погрешностей: неустранимая погрешность; погрешность метода; вычислительная погрешность. Неустранимая погрешность порождается: а) неточностью входных данных в математическом описании задачи; б) несоответствия математической модели реальной задаче. Погрешность метода возникает из-за того, что используются приближенные методы. А погрешность вычислений возникает при вводе-выводе и при выполнении математических операций, а также при округлениях. Попробуем привести несколько практических приемов для уменьшения влияния вычислительной погрешности на результаты вычислений.
1. Сложение чисел необходимо проводить по мере их возрастания так как в машинной арифметике из-за погрешности округления существенен порядок выполнения операций.
2. В некоторых случаях имеет смысл выполнить предварительные преобразования вычисляемого выражения.
3. Необходимо исключать вычитание двух почти равных чисел, тем более когда такая разность находится в знаменателе выражения.
4. Если числа равны a и b почти равны, то вычитание этих чисел следует производить раньше, чем деление или умножение.
К примеру, следует отдать предпочтение выражению (a-b)/c, а не выражению a/c-b/c. Во-первых здесь меньше операций (смотри пункт 3 и 6), а во-вторых, после деления числа станут меньше и еще меньше будут отличаться друг от друга, что может привести к обращению разности в ноль.
5. При перемножении нескольких чисел надо сразу перемножать самое большое число и самое маленькое, так как умножение друг на друга нескольких маленьких чисел может привести к появлению машинного нуля.
6. Всегда следует стремиться к уменьшению числа арифметических операций. Это объясняется тем, что чем больше операций, тем больше суммирующие погрешности.
Читайте также:
- Слова о педагогическом коллективе школы
- Для чего нужна характеристика из школы
- Политическая символика как элемент политической культуры кратко
- Что такое ушу кратко
- Почему заселение территории россии происходило в основном на восток а не на запад кратко
поделиться знаниями или
запомнить страничку
- Все категории
-
экономические
43,673 -
гуманитарные
33,656 -
юридические
17,917 -
школьный раздел
612,059 -
разное
16,908
Популярное на сайте:
Как быстро выучить стихотворение наизусть? Запоминание стихов является стандартным заданием во многих школах.
Как научится читать по диагонали? Скорость чтения зависит от скорости восприятия каждого отдельного слова в тексте.
Как быстро и эффективно исправить почерк? Люди часто предполагают, что каллиграфия и почерк являются синонимами, но это не так.
Как научится говорить грамотно и правильно? Общение на хорошем, уверенном и естественном русском языке является достижимой целью.