From Wikipedia, the free encyclopedia
Maximum time interval error (MTIE) is the maximum error committed by a clock under test in measuring a time interval for a given period of time. It is used to specify clock stability requirements in telecommunications standards.[1] MTIE measurements can be used to detect clock instability that can cause data loss on a communications channel.[2]
Measurement[edit]
A given dataset (clock waveform) is first compared to some reference. Phase error (usually measured in nanoseconds) is calculated for an observation interval. This phase shift is known as time interval error (TIE). MTIE is a function of the observation interval. An observation interval window moved across the dataset. Each time the peak-to-peak distance between the largest and smallest TIE in that window is noted. This distance varies as the window moves, being maximal for some window position. This maximal distance is known as MTIE for the given observation interval.
Plotting MTIE vs. different observation interval duration gives a chart useful for characterizing the stability of the clock.
See also[edit]
- Allan variance
- Clock drift
- Instantaneous phase
- Jitter
- Phase noise
- Plesiochronous digital hierarchy
- Time deviation
References[edit]
- ^ Stefano Bregni (October 1996). «Measurement of Maximum Time Interval Error for Telecommunications Clock Stability Characterization» (PDF). IEEE Transactions on Instrumentation and Measurement. IEEE. Retrieved 2020-06-17.
- ^ «Time and Frequency from A to Z — M». NIST. 2016-09-26.
From Wikipedia, the free encyclopedia
Maximum time interval error (MTIE) is the maximum error committed by a clock under test in measuring a time interval for a given period of time. It is used to specify clock stability requirements in telecommunications standards.[1] MTIE measurements can be used to detect clock instability that can cause data loss on a communications channel.[2]
Measurement[edit]
A given dataset (clock waveform) is first compared to some reference. Phase error (usually measured in nanoseconds) is calculated for an observation interval. This phase shift is known as time interval error (TIE). MTIE is a function of the observation interval. An observation interval window moved across the dataset. Each time the peak-to-peak distance between the largest and smallest TIE in that window is noted. This distance varies as the window moves, being maximal for some window position. This maximal distance is known as MTIE for the given observation interval.
Plotting MTIE vs. different observation interval duration gives a chart useful for characterizing the stability of the clock.
See also[edit]
- Allan variance
- Clock drift
- Instantaneous phase
- Jitter
- Phase noise
- Plesiochronous digital hierarchy
- Time deviation
References[edit]
- ^ Stefano Bregni (October 1996). «Measurement of Maximum Time Interval Error for Telecommunications Clock Stability Characterization» (PDF). IEEE Transactions on Instrumentation and Measurement. IEEE. Retrieved 2020-06-17.
- ^ «Time and Frequency from A to Z — M». NIST. 2016-09-26.
From Wikipedia, the free encyclopedia
Maximum time interval error (MTIE) is the maximum error committed by a clock under test in measuring a time interval for a given period of time. It is used to specify clock stability requirements in telecommunications standards.[1] MTIE measurements can be used to detect clock instability that can cause data loss on a communications channel.[2]
Measurement[edit]
A given dataset (clock waveform) is first compared to some reference. Phase error (usually measured in nanoseconds) is calculated for an observation interval. This phase shift is known as time interval error (TIE). MTIE is a function of the observation interval. An observation interval window moved across the dataset. Each time the peak-to-peak distance between the largest and smallest TIE in that window is noted. This distance varies as the window moves, being maximal for some window position. This maximal distance is known as MTIE for the given observation interval.
Plotting MTIE vs. different observation interval duration gives a chart useful for characterizing the stability of the clock.
See also[edit]
- Allan variance
- Clock drift
- Instantaneous phase
- Jitter
- Phase noise
- Plesiochronous digital hierarchy
- Time deviation
References[edit]
- ^ Stefano Bregni (October 1996). «Measurement of Maximum Time Interval Error for Telecommunications Clock Stability Characterization» (PDF). IEEE Transactions on Instrumentation and Measurement. IEEE. Retrieved 2020-06-17.
- ^ «Time and Frequency from A to Z — M». NIST. 2016-09-26.
1.3.5.1 Максимальная ошибка временного интервала (МОВИ) и девиация временного интервала (ДВИ) относятся к параметрам, характеризующим низкочастотный фазовый шум ПЭГ (дрейф фазы или «wander»), и весьма важны для оценки качества синхросигналов на выходах ПЭГ. Эти параметры, должны измеряться предназначенными для этого специализированными средствами измерения, подходящими для поставленной задачи в правовом и метрологическом отношении (см. п. 1.2.1 и раздел 3). При этом важно помнить, что для оценки синхросигналов на выходах ПЭГ на соответствие нормам по этим параметрам в качестве опорной частоты должен подключаться эталонный сигнал, имеющий параметры частоты не хуже, чем требуется для ПЭГ (см. п. 3.2.1.2).
1.3.5.2 Нарушение неравномерности фазы (непостоянство фазы) синхросигналов на выходах ПЭГ проверяется путем измерения величины скачка фазы при переключениях на резервный источник в аппаратуре ПЭГ. Измерение проводится приборами, указанными в предыдущем пункте (см. также п. 1.2.1 и раздел 3).
1.3.5.3 Еще одним параметром, характеризующим состояние фазы синхросигналов, является фазовое дрожание («jitter»). Эти измерения должны также проводиться с помощью средств измерения электросвязи, позволяющих измерять нормируемые для сигналов синхронизации значения фазового дрожания (см. п. 1.2.1 и раздел 3). Следует иметь в виду, что отечественные и зарубежные анализаторы цифровых сигналов, имеющие режим измерения фазового дрожания, не всегда рассчитаны на измерение низких значений параметров фазового дрожания, нормируемых для синхросигналов.
1.3.5.4 Контроль параметров дрейфа (МОВИ, ДВИ скачков фазы при переключениях в аппаратуре) и дрожания фазы синхросигналов на выходах ПЭГ должен проводиться при вводе аппаратуры в эксплуатацию и периодически (1 раз в год), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.5.5 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
1.3.6 Параметры импульсов синхросигналов
1.3.6.1 Проверка параметров импульсов (форма и амплитуда) периодических сигналов синхронизации с частотой 2048 кГц и со скоростью 2048 кбит/с (в коде HDB-3) может выполняться с помощью широко распространенных отечественных осциллографов, удовлетворяющих определенным требованиям по частоте и погрешности измерения (см. раздел 3), путем сравнения параметров импульса по горизонтали и вертикали с внешним шаблоном, соответствующим норме. Возможно применение современных осциллографов или анализаторов сигналов связи (зарубежных фирм), в программы которых заложены стандартизованные шаблоны (маски) в соответствии с Рекомендацией МСЭ-Т G.703 [21]. Последние выводятся на экран одновременно с измеряемым сигналом, но следует иметь в виду, что эти приборы, относящиеся к категории СИЭ, предварительно подлежат обязательной сертификации (см. п. 1.2 и раздел 3).
1.3.6.2 Контроль параметров импульсов синхросигналов на выходах ПЭГ должен проводиться предназначенными для этого средствами измерения при вводе аппаратуры в эксплуатацию и периодически (1 раз в год) одновременно с проверкой других параметров (п.п. 1.3.4 и 1.3.5), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.6.3 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
Погрешность измерения частоты. В
соответствии с общим принципом измерения
частоты основные составляющие погрешности
можно представить двумя группами:
– погрешности, обусловленные мерой
частоты,
Рис. 4.9. Временная
диаграмма измерения интервалов времени
– погрешности сравнения меры с
измеряемым значением частоты (погрешность
метода дискретного счета).
Мерой частоты в схемах электронно-счетных
частотомеров является частота опорного
кварцевого генератора
![]()
.
Путем ее деления формируется необходимая
длительность счетного интервала времени
![]()
.
Относительная погрешность частоты
(нестабильность) генератора

вызывает такую же по значению относительную
погрешность формирования длительности
счетного интервала, а, следовательно,
и равную ей составляющую погрешности
измерения частоты. Здесь и далее
относительная погрешность приведена
в относительных единицах. Как известно,
ее можно оценивать в процентах, т.е.
![]()
.
Для повышения стабильности опорный
генератор имеет кварцевую стабилизацию,
причем кварцевый резонатор и часть
деталей генератора заключается в
термостат, в котором поддерживается
постоянная температура. Относительная
частотная погрешность
![]()
,
обусловленная несовершенством кварцевых
генераторов в современных приборах
обычно мала и составляет от 5∙10-6
до 5∙10-8.
Характерной составляющей погрешности
измерения частоты является погрешность
сравнения, вытекающая из самого метода
дискретного счета. Она обусловлена тем
фактом, что во временном интервале
![]()
может укладываться не целое число
периодов
заполняющих импульсов. Абсолютная
погрешность
![]()
определения интервала
будет
принимать значения
![]()
и зависит от фазовых соотношений между
началом интервала
и первым, вошедшим в него импульсом, а
также окончанием интервала
и последним, вошедшим в него, импульсом.
Нулевая погрешность получится, если на
интервале
уложится целое число периодов
(рис. 4.10, а). Ситуация, при которой
![]()
,
приведена на рис. 4.10, б,
![]()
– на рис. 4.10, в.
Таким образом, из-за дискретности счета
и независимости временных положений
заполняющих импульсов относительно
временного интервала возможна абсолютная
максимальная ошибка сравнения, равная
одному периоду заполняющих импульсов:
.
Следовательно, относительная погрешность
сравнения на счетном интервале
составит:

.
Результирующую относительную погрешность
измерения частоты принято оценивать
предельным ее значением, выраженным
в виде суммы двух ее важнейших составляющих:

.
Из этого выражения следует, что чем
больше единиц счета получено в результате
измерения, тем меньше относительная
погрешность. Численное значение
определяется частотой
![]()
и выбранным временем измерения; оно
ограничивается разрядной сеткой счетчика
и цифрового отсчетного устройства.
Число, полученное в результате измерения,
не должно превышать по абсолютной
величине максимального числа, которое
может быть подсчитано и представлено
в цифровом приборе. В
Рис. 4.10. Погрешность
метода дискретного счета
противном случае старшие разряды будут
потеряны, а результат измерения искажен.
Такое явление называется переполнением
разрядной сетки. В приборе Ч3-33
представляются восьмиразрядные числа,
поэтому результат не должен превышать
числа 99999999.
При малых
составляющая погрешности сравнения
(погрешности счета) может намного
превышать составляющую, обусловленную
нестабильностью кварцевого генератора.
Снижение указанной погрешности
измерения низких частот достигается
увеличением счетного интервала времени
![]()
,
переходом на измерение периода
сигнала либо путем применения умножителей
измеряемой частоты, включаемых на
входе частотомера.
Пример 3. Определить предельное
значение относительной погрешности
измерения частоты сигнала, рассмотренного
в примере 1. Искомая погрешность составит:

.
Погрешность измерения периода сигналов.
В этом режиме работы частотомера
формирование заполняющих импульсов
![]()
осуществляется
путем умножения частоты кварцевого
опорного генератора, а временной
интервал формируется равным измеряемому
периоду
.
Тем самым общий принцип работы частотомера
сохраняется. В данном случае можно
указать три основные составляющие
погрешности измерения:
– погрешность меры временного интервала,
роль которого выполняет период напряжения
кварцевого генератора (с учетом умножения
его частоты);
– погрешность формирования счетных
импульсов и счетного интервала
времени;
– погрешность сравнения меры с измеряемым
периодом.
Погрешность меры будет определяться
относительной погрешностью частоты
опорного кварцевого генератора
![]()
.
Относительная погрешность сравнения,
как и при измерении частоты, может
быть оценена отношением максимальной
абсолютной ошибки единицы счета, равной
периоду заполняющих импульсов

,
к измеряемому периоду
,
т. е.
.
Эта составляющая погрешности носит
случайный характер, она может быть
уменьшена путем усреднения серии
полученных измерений периода. Если
число усредняемых значений будет
,
то принято считать значение погрешности
сравнения
.
Составляющая погрешности формирования
меток времени, обусловленная
нестабильностью запуска схемы
формирования, пренебрежимо мала и
может не учитываться. Однако в отличие
от режима измерения частоты составляющая
погрешности формирования временного
интервала, равного измеряемому периоду,
может быть существенной. Особенно
она проявляется при гармоническом
входном сигнале малой частоты, когда
скорость изменения уровня сигнала
невелика. В этих случаях уровень запуска
схемы формирования счетного интервала
оказывается нестабильным. Кроме того,
значительное влияние на запуск схемы
может оказать сигнал помехи, действующий
совместно с входным сигналом. Все это
приводит к формированию временного
интервала, отличающегося от измеряемого
периода на некоторую ошибку запуска
![]()
.
Соответствующая относительная погрешность
запуска, а следовательно, и составляющая
погрешности измерения периода будет
равна

.
Значение ее определяется свойствами
схемы формирования временного интервала
и зависит от отношения амплитуд
помехи и сигнала на входе частотомера.
Обычно численное значение погрешности
запуска приводится в нормативно-технической
документации на прибор. Наиболее часто
задается приближенное значение этой
составляющей:
![]()
.
Погрешность запуска носит случайный
характер; она может быть уменьшена при
усреднении измерений. При числе
усредняемых значений
погрешность запуска
.
Результирующее значение предельной
относительной погрешности измерения
периода синусоидального сигнала
представляется в виде суммы трех
составляющих:
,
для импульсного сигнала – двух
составляющих:

.
Как видно из этого соотношения, при
измерении малых периодов погрешность
измерения может быть достаточно большой.
Уменьшение ее достигается либо путем
увеличения частоты заполнения (уменьшения
длительности временных меток), либо
увеличением числа усредняемых периодов,
а также путем перехода в режим измерения
частоты.
Пример 4. Определить предельное
значение относительной погрешности
измерения периода сигнала, рассмотренного
в примере 2. Искомое значение погрешности
составляет:

.
Погрешность измерения отношения
частот двух сигналов. Число составляющих
погрешности аналогично как при определении
погрешности измерения частоты.
Погрешность меры – относительная
погрешность частоты опорного
кварцевого генератора
.
Относительная погрешность сравнения
![]()
может быть оценена отношением
максимальной абсолютной ошибки единицы
счета, равной периоду заполняющих
импульсов, формируемых из сигнала
большей частоты
![]()
,
т.е.
,
к периоду меньшей частоты
.
С учетом коэффициента усреднения
предельное значение погрешности
составит:
.
Пример 5. Определить предельное
значение относительной погрешности
измерения отношения частот двух сигналов
для случая, приведенного на рис. 4.7.
Поскольку
![]()
,
![]()
,
то

.
Погрешность измерения временных
интервалов. Погрешность может быть
определена как для периода импульсного
сигнала:
,
где
![]()
– длительность импульса или временного
интервала.
Пример 6. Определить предельное
значение относительной погрешности
временного интервала в соответствие с
временными диаграммами, приведенными
на рис. 4.9. Для наихудшего случая
![]()
,
,
тогда:

.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Читайте также:
|
Для этого рассмотрим передачу и прием цифрового сигнала Ref 2, который сравнивается с эталонным сигналом Ref 1 (рис. 1.6). Как видно из рисунка, сигнал Ref 2 имеет сдвиг по фазе относительно эталонного сигнала. Оценить этот сдвиг можно через параметр времени, который получил название ошибки временного интервала TIE (Time Interval Error). Сравнивая сигнал синхронизации с эталонным сигналом, измеряются параметры TIE: текущее значение, среднее значение за период измерений, различные зависимости параметра TIE от времени наблюдения и т.д., максимальное значение параметра TIE. Измерение параметра TIE осуществляется как в абсолютных единицах (единицы времени), так и в приведенных единицах (например, UI). Здесь напомним, что 1UI — это время, необходимое для передачи 1 бита информации в данной системе передачи.
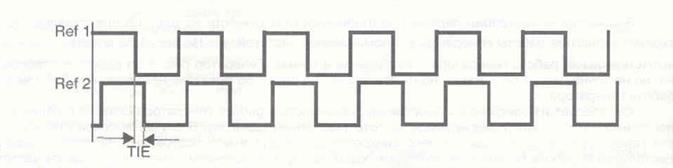
Рис.1.6. Понятие TIE
Максимальная ошибка временного интервала — МТІЕ.
Параметр TIE не представляет нормативной ценности для анализа параметров синхросигналов. Рассмотрим произвольный синхросигнал, который сравнивается с эталонным (рис. 1.7). С определенным шагом дискретизации измеряется значение TIE. Параметр TIE измеряется в течение всего времени измерений Т. Введем параметр интервала измерений S, за который осуществляется оценка максимального пиковое отклонения параметра TIE. Этот параметр получил название MTIE (максимальной ошибки временного интервала — МОВИ). Таким образом,

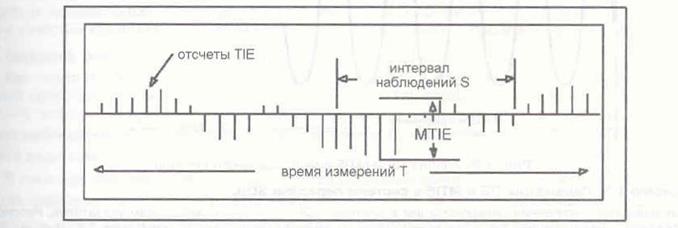
Рис. 1.7. Параметры TIE и MTIE
Очевидно, что значение параметра MTIE зависит от размера интервала S. Обычно в качестве характеристики синхросигнала используется зависимость MTIE (S), которая является одной из основных характеристик источников синхронизации.
Поскольку для измерений параметров MTIE обычно используются интервалы наблюдений S в 1 с или более, на этот параметр оказывают влияние как вандер, так и джиттер, однако обычно амплитуда джиттера намного меньше, так что ею можно пренебречь для широкого диапазона случаев. Таким образом, основным фактором, влияющим на параметр MTIE, является вандер.
Дата добавления: 2015-07-10; просмотров: 287 | Нарушение авторских прав
mybiblioteka.su — 2015-2023 год. (0.01 сек.)
Игорь Ибрагимов, инженер
В статье рассматриваются методы синхронизации, применяемые в сетях SyncE. Подробно описываются требования, предъявляемые к отклонению сигналов.
SyncE, или синхронная сеть Ethernet (Synchronous Ethernet), представляет собой разновидность стандартной сети Ethernet. SyncE позволяет всем внутрисетевым узлам работать синхронно, несмотря на существенную разницу в задержках распространения сигналов.
Это достигается за счет передачи информации о частоте по физическому уровню Ethernet, который связан с опорным тактовым сигналом. Сеть SyncE получила широкое распространение не только в проводных, но и беспроводных сетях, поскольку она обеспечивает частотную синхронизацию в больших и распределенных сетях. По мере развертывания сетей 5G SyncE будет все шире применяться для обеспечения точного опорного сигнала.
Эволюция Ethernet
Сети Ethernet отличаются низкой стоимостью и простотой. Именно эти преимущества сделали их доминирующей средой передачи данных, когда произошел переход от голосовых сетей к IP-передаче. По мере увеличения объема пакетных данных сети SONET (synchronous optical networking) и SDH (synchronous digital hierarchy) были замещены сетями на основе Ethernet.
Сети IP/Ethernet имеют низкую стоимость, обеспечивают высокую емкость и сервисы нескольких типов в рамках одной сети. Однако у них имеется недостаток: классические сети Ethernet асинхронны, что недопустимо для качественной передачи голоса по IP, сотовой связи или сетей усовершенствованных датчиков, где требуется низкая задержка, а также для систем реального времени.
Для решения этой проблемы были разработаны сети SyncE, в которых сигналы линии на физическом уровне, которые использовались в системах с временным разделением (TDM), заменены похожим, но синхронным тактовым сигналом, совместимым с протоколом Ethernet. В больших сетях с несколькими конечными точками сигнал синхронизации распространяется с центрального источника к главному опорному тактовому генератору PRC (primary reference clock) в отдаленные концы сети.
Сети SyncE поддерживают создание и распространение качественных опорных синхросигналов по проводным и беспроводным сетям. Ресинхронизация не требуется, поскольку синхронизирующий сигнал передается на физическом уровне вместе с данными. Заметим, что в SyncE возможна частотная синхронизация без передачи данных, когда информация о частоте передается между узлами. Такой подход отличается от временной синхронизации, в которой требуется передача не только частоты, но и фазы. Временная синхронизация применяется в протоколе точного времени PTP (precision time protocol).
Требования к точности SyncE
Механизм синхронизации сети SyncE основан на иерархии тактовых генераторов. Сверху расположен наиболее точный генератор. Практически во всех сетях SyncE самый точный генератор представлен PRC-генератором с точностью 10–11. Он обеспечивается локальным источником с очень высокой стабильностью, хотя чаще для этой цели используют сигнал GPS. Уровнем ниже находится блок источника синхронизации (SSU), где требуется функция передачи в режиме holdover, позволяющая блоку сохранять синхронизацию в течение некоторого времени в случае потери сигнала PRC. Мы вернемся к этому режиму позже.
Третий уровень занимает тактовый генератор оборудования Ethernet (Ethernet equipment clock EEC). В нем также используется режим holdover, но его точность может быть ниже, чем на уровне блока источника синхронизации. На этом уровне используется схема ФАПЧ, следящая за локальным резервным опорным источником, в качестве которого используется термостатированный кварцевый генератор (ОСХО ) или кварцевый генератор с температурной компенсацией (ТСХО ). Стабильность частоты – не меньше ±4,6 ppm.
Заметим, что точность всей сети в целом равна точности PRC-генератора (т. е. 10–11), если доступен первичный опорный сигнал. В нормальном режиме работы он распределяется по всей сети. Иногда ошибочно считают, что SyncE имеет точность синхронизации ±4,6 ppm, однако это справедливо только для свободно идущих часов EEC. Д ля таких приложений как мобильные сети требуется точность около ±50 ppb. Когда система замкнута и синхронизована с помощью PRC-генератора, ее точность равна нескольким ppb или выше. Когда устройство теряет синхронизацию, оно возвращается к точности локального опорного кварцевого генератора EEC. На рисунке 1 упрощенно показана разница между классической сетью Ethernet и SyncE (погрешность ±100 ppm и ±4,6 ppm, соответственно).

Рис. 1. Синхронизация в классическом стандарте Ethernet и SyncE
Ст андарты ITU для SyncE
Международные стандарты реализации SyncE определяются группой ITU-T. Ею разработаны требования по взаимодействию между стандартами, несоблюдения которых ведет к несовместимости устройств. К сетям SyncE относятся следующие стандарты:
–– G.8262 (требования к тактовым генераторам), которые определяют временные характеристики синхронных
локальных тактовых генераторов EEC (Ethernet equipment clocks);
–– G.8262.1 (требования к тактовым генераторам продвинутого уровня eEEC), которые определяют временные характеристики синхронных локальных тактовых генераторов продвинутого уровня. К ним предъявляются более строгие требования с акцентом на 5G.
Упомянутые стандарты содержат требования к фазовому шуму и отклонению частотных параметров тактовых генераторов SyncE. Фазовый шум определяется как отклонение фазы выше полосы 10 Гц;
дрейфом фазы является ее отклонение на частотах ниже 10 Гц. Использование значения 10 Гц как разделительной линии является исторически сложившимся фактом.
Заметим, что и фазовый шум, и дрейф представляют собой изменение фазы, однако они по-разному влияют на сеть. Чрезмерный шум приводит к ошибкам в битах и к потере пакетов данных. Дрейф не позволяет тактовому генератору следить за опорным тактовым сигналом более высокого уровня. Как упоминалось, тактовые генераторы привязаны к главному опорному тактовому сигналу, а информация о тактовом сигнале передается с помощью сигнала физического уровня.
Стандарты ITU-T описывают процедуру тестирования и ожидаемые требования к тактовым генераторам SyncE. Стандарт G.8262 предлагает две разные полосы: первая (1–10 Гц) по умолчанию используется в синхронизированных сетях в Европе; она оптимизирована под требования к оборудованию в иерархии 2048 Кбит/с. Вторая полоса (0,1 Гц) используется в США ; она оптимизирована под иерархию 1544 Кбит/с.
Необходимо выбрать качественный генератор синхросигнала, удовлетворяющий требованиям SyncE. Речь идет не только об обеспечении точности ±4,6 ppm – имеется еще несколько параметров. Перейдем к их рассмотрению.
Точность на холостом ходу
Точность выходного сигнала генератора, когда на него не поступает опорный сигнал более высокого уровня, должна быть не хуже ±4,6 ppm на протяжении года. Это очень высокая точность по сравнению с классической сетью Ethernet, где обеспечивается ±100 ppm.
Режим Holdover
Тактовый генератор непрерывно рассчитывает среднюю частоту заблокированного опорного сигнала. Если опорный источник дает сбой и нет других доступных опорных тактовых сигналов, генератор переходит в режим Holdover и вырабатывает сигнал, рассчитанный по среднему значению. Стабильность сигнала в режиме Holdover зависит от частотной стабильности резонатора ФАПЧ в главном тактовом генераторе.
Слежение за входом
Генератор синхросигнала должен постоянно следить за качеством входных сигналов. Если они искажены, т. е. наблюдаются разрывы или дрейф частоты, осуществляется бесшовное переключение на другой подходящий вход с очень малым отклонением фазы на выходе.
Измерение фазового шума SyncE
Фазовый шум имеется в каждой системе передачи данных. Некоторые компоненты, например ослабители фазового шума Silicon Labs Si539x/4x, вносят малый фазовый шум. Они надежны, устойчивы к фазовому шуму и полностью удовлетворяют следующим требованиям SyncE.
–– Генерация фазового шума. Генератор не должен выходить за пределы, установленные маской. Маска определяется интерфейсом и скоростью (1G, 10G или 25G). Silicon Labs предлагает аттенюаторы фазового шума, генерирующие фазовый сигнал менее 100 фс в полосе 12 кГц…20 МГц.
–– Нечувствительность к фазовому шуму. Этот тест позволяет проверить стойкость генератора к фазовому шуму на входе. На рисунке 2 показаны результаты испытаний Si5395 на стойкость к фазовому шуму 25G при подаче на вход частотно-модулированного сигнала 25 МГц. Для каждой модулирующей частоты, предусмотренной стандартом, отклонение наблюдается только до момента, когда включается сигнал сбоя. Видно, что генератор Si539x превосходит требования по стойкости к фазовому шуму.

Рис. 2. Результаты измерения стойкости к фазовому шуму тактового генератора SyncE Si5395. Устройство соответствует требованиям G.8262
Дрейф частоты SyncE
Каждый тактовый генератор нижнего уровня привязан к частоте PRC, поскольку тактовый сигнал восстанавливается из входящего сигнала физического уровня SyncE. Однако в процессе восстановления и регенерации опорного тактового сигнала может произойти отклонение частоты. Для предотвращения этого эффекта сигнал проходит фильтрацию в ФАПЧ. Полоса пропускания ФАПЧ не превышает 10 Гц. В стандартах всегда указывается дрейф, который может быть пропущен ФАПЧ, и отклонение, вносимое самой ФАПЧ в отсутствие дрейфа сигнала на входе.
Отклонение частоты измеряется по отношению к внешнему опорному тактовому генератору, который напрямую соединен с главным тактовым генератором. Основной единицей измерения является ошибка временного интервала TIE, на основе которой вычисляются следующие параметры.
–– Максимальная ошибка временного интервала MTIE (maximum time interval error). Она представляет собой размах TIE. Максимальная ошибка временного интервала равномерно возрастает с увеличением времени наблюдения. Это долгосрочный показатель стабильности, нечувствительный к ВЧ-шуму.
–– Временной дрейф TDE V (time deviation), по сути, представляет собой спектральный анализ зависимости TIE от интервала наблюдения τ. Он рассчитывается путем вычисления среднего значения TIE после фильтрации полосы пропускания. Это значение обратно пропорционально интервалу наблюдения. Для получения точного значения TDEV измерения проводятся в течение времени, по крайней мере, в 12 раз превышающего максимальный требуемый интервал наблюдения. В большинстве контрольных процедур в SyncE требуется измерение дрейфа и отклонений. При этом результаты измерений в большой мере зависят от качества сигнала резервного опорного тактового кварцевого генератора (TCXO/OCXO). Рассмотрим эти процедуры подробнее.
Вносимый дрейф
Внутренний дрейф тактового генератора можно измерить, когда на входе сигнал без дрейфа. С помощью масок MTIE и TDEV установлены строгие пределы на величину дрейфа, который может вносить генератор в SyncE. На рисунке 3 показаны маски MTIE и TDEV, а также результаты измерения для аттенюатора фазового шума Silicon Labs Si5395.

Рис. 3. Маски MTIE, TDEV (пунктиром) и результаты измерений аттенюатора фазового шума Si5395 от Silicon Labs
Допустимый дрейф
На вход генератора подается сигнал с дрейфом для проверки работоспособности генератора при неблагоприятных условиях. Задачей проверки является нахождение максимального значения дрейфа, при котором устройство не регистрирует сбой. Маски MTIE и TDEV позволяют установить пределы отклонений на выходе при известном отклонении на входе.
Передача дрейфа
Этот параметр характеризует количество дрейфа, которое проходит через генератор на выход и не отфильтровывается ФАПЧ.
Перескок фазы
Перескоки фазы возникают, когда входной опорный сигнал теряется и ФАПЧ переключается на другой опорный источник или в режим holdover, если резервный генератор недоступен. Стандартом установлены ограничения на перескоки.
Выводы
На начальной стадии проектирования следует определить требования, предъявляемые к системе, чтобы выбрать метод синхронизации. Стандарт SyncE имеет преимущества по сравнению с Ethernet, поскольку обеспечивает централизованную синхронизацию узлов. Синхросигнал передается на физическом уровне, обеспечивая высокую точность (порядка ppb) во всей сети. Его можно использовать для создания проводных и гибридных сетей с синхронизацией частот, которая необходима для приложений реального времени.
Заметим, что сеть SyncE обеспечивает только синхронизацию частот, но не может передавать информацию о времени суток.
Временная, частотная и фазовая синхронизация в сети Ethernet выполняется с помощью PTP – двустороннего протокола передачи сообщений для синхронизации времени суток между главным генератором и подчиненными.
1.3.5.1 Максимальная ошибка временного интервала (МОВИ) и девиация временного интервала (ДВИ) относятся к параметрам, характеризующим низкочастотный фазовый шум ПЭГ (дрейф фазы или «wander»), и весьма важны для оценки качества синхросигналов на выходах ПЭГ. Эти параметры, должны измеряться предназначенными для этого специализированными средствами измерения, подходящими для поставленной задачи в правовом и метрологическом отношении (см. п. 1.2.1 и раздел 3). При этом важно помнить, что для оценки синхросигналов на выходах ПЭГ на соответствие нормам по этим параметрам в качестве опорной частоты должен подключаться эталонный сигнал, имеющий параметры частоты не хуже, чем требуется для ПЭГ (см. п. 3.2.1.2).
1.3.5.2 Нарушение неравномерности фазы (непостоянство фазы) синхросигналов на выходах ПЭГ проверяется путем измерения величины скачка фазы при переключениях на резервный источник в аппаратуре ПЭГ. Измерение проводится приборами, указанными в предыдущем пункте (см. также п. 1.2.1 и раздел 3).
1.3.5.3 Еще одним параметром, характеризующим состояние фазы синхросигналов, является фазовое дрожание («jitter»). Эти измерения должны также проводиться с помощью средств измерения электросвязи, позволяющих измерять нормируемые для сигналов синхронизации значения фазового дрожания (см. п. 1.2.1 и раздел 3). Следует иметь в виду, что отечественные и зарубежные анализаторы цифровых сигналов, имеющие режим измерения фазового дрожания, не всегда рассчитаны на измерение низких значений параметров фазового дрожания, нормируемых для синхросигналов.
1.3.5.4 Контроль параметров дрейфа (МОВИ, ДВИ скачков фазы при переключениях в аппаратуре) и дрожания фазы синхросигналов на выходах ПЭГ должен проводиться при вводе аппаратуры в эксплуатацию и периодически (1 раз в год), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.5.5 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
1.3.6 Параметры импульсов синхросигналов
1.3.6.1 Проверка параметров импульсов (форма и амплитуда) периодических сигналов синхронизации с частотой 2048 кГц и со скоростью 2048 кбит/с (в коде HDB-3) может выполняться с помощью широко распространенных отечественных осциллографов, удовлетворяющих определенным требованиям по частоте и погрешности измерения (см. раздел 3), путем сравнения параметров импульса по горизонтали и вертикали с внешним шаблоном, соответствующим норме. Возможно применение современных осциллографов или анализаторов сигналов связи (зарубежных фирм), в программы которых заложены стандартизованные шаблоны (маски) в соответствии с Рекомендацией МСЭ-Т G.703 [21]. Последние выводятся на экран одновременно с измеряемым сигналом, но следует иметь в виду, что эти приборы, относящиеся к категории СИЭ, предварительно подлежат обязательной сертификации (см. п. 1.2 и раздел 3).
1.3.6.2 Контроль параметров импульсов синхросигналов на выходах ПЭГ должен проводиться предназначенными для этого средствами измерения при вводе аппаратуры в эксплуатацию и периодически (1 раз в год) одновременно с проверкой других параметров (п.п. 1.3.4 и 1.3.5), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.6.3 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
7.1. Понятия джиттера, его классификация и влияние на параметры канала
7.2. Причины возникновения джиттера
7.3. Виды измерений фазового дрожания (джиттера) и их необходимость
7.4. Нормы на фазовые дрожания
7.5. Методы измерения фазового дрожания
7.6. Техника измерения и тестирования фазового дрожания
7.6.1. Измерение выходного фазового дрожания
7.6.2. Измерение преобразования фазового дрожания
7.6.3. Измерение допустимого фазового дрожания
7.1. Понятия джиттера, его классификация и влияние на параметры канала
Как известно, фазовое дрожание (джиттер) определяется как кратковременные фазовые отклонения цифрового сигнала от его идеального состояния во времени с частотами выше 10Гц. Значимой при этом может быть любая удобная и легко определяемая точка сигнала, находящаяся, например, на переднем или заднем фронте импульса. Вторым параметром, тесно связанным с фазовым дрожанием, является дрейф фазы (вандер), который обычно относится к долговременным изменениям фазы сигнала. Хотя не существует стандартизированной границы, отличающей фазовое дрожание от дрейфа фазы, последний обычно рассматривают как фазовые отклонения ниже 10 Гц.
Функция фазового дрожания может быть получена путем графического отображения во времени отклонения положения фронта импульса или выбранной точки синусоидального сигнала на выходе контролируемой системы передачи при воздействии на ее вход сигналом с заданным уровнем фазового дрожания. При этом амплитуда фазового дрожания часто выражается в относительных интервальных единицах ЕИ (UI), а не в единицах абсолютного времени, так как в этом случае результат измерения не зависит от действительной скорости передачи данных, что позволяет осуществить сравнение амплитуды фазового дрожания на различных иерархических уровнях в цифровой системе передачи.
В ВОСП встречаются различные типы дрожания фазы, а именно :
- случайное дрожание фазы, которое не зависит от передаваемой последовательности и возникает в следствие шумов, создаваемых электронными элементами регенератора;
- детерминированное фазовое дрожание (собственное), которое представляет собой последовательность смещений, создаваемых схемой восстановления тактовой частоты.
Детерминированное дрожание фазы также может возникать в следствии искажений формы сигнала и преобразований амплитуда – фаза – шум. Учитывая , что между терминалами может быть несколько регенераторов, происходит накопление уровня дрожания фазы в зависимости от их количества. Приняв модель не коррелированного дрожания фазы, считаем, что результирующее дрожание фазы пропорционально квадратному корню из количества регенераторов, в то время как при детерминированном дрожании фазы регенераторов результирующее дрожание обычно пропорционально количеству регенераторов. Последний тип дрожания фазы является детерминирующим в реальных системах с большим числом регенераторов.
Джиттер приводит к отсчету цифровых сигналов в не идеальные моменты времени. Это может привести к единичным или серийным ошибкам. Количество регенерированного сигнала так же в значительной степени определяется устойчивостью системных компонентов к джиттеру. Джиттер также может вызывать проскальзывание битов из-за перегрузки или не догрузки динамических буферов. Теоретически, перед возникновением ошибок в отчете вариация может достигать половины текущей ширены бита, который отсчитывается. На практике, критические значения намного меньше благодаря искажению сигнала и дополнительному шуму.
7.2. Причины возникновения джиттера
В зависимости от причины возникновения, различают систематический и несистематический джиттер. Систематический джиттер зависит от переданной битовой последовательности . Задержки в скремблерах и кодерах являются зависимыми от набора. Линейное искажение может также привести к импульсным переходным помехам, которые также зависят от набора, что вызывает появление джиттера, если выравнивание сигнала не совсем корректно или контуры контроля восстановления сигнала настроены неправильно. Несистематический джиттер вызывается электромагнитным воздействием внутренних и внешних интерфейсных сигналов, таких как переходные помехи, шум, отражения и другие интерфейсные напряжения. В частности, проблемой является интерференция тактирования из-за других системных компонентов.
Проблема джиттера проявляется в SDH больше. Пойнтерные операции вызывают единичные или повторяющиеся фазовые скачки величиной 24 бита. Входные компоненты системы должны удалять их по возможности полностью. Результатом этого процесса является пойнтерный джиттер. Ещё один тип джиттера возникает в результате выполнения стаффинга для подключения плезиохронных сигналам к синхронным сетевым элементам. Биты стаффинга разрывают входной сигнал во время размещения (mapping). Потом восстановление сигнала всегда приводит к джиттеру, известному как джиттер размещения. Следующая группа разновидностей джиттера известна как джиттер выравнивания. Он обусловлен тем, что необходимые позиции выравнивания в плезиохронных структурах цикла появляются только в определенные моменты времени. Результатом этого оказывается фазовая модуляция передаваемого сигнала.
К сожалению, джиттер накапливается каждый раз, когда сигнал регенерируется на маршруте передачи. Ясно, что нежелательный джиттер можно снизить в определенных пределах внутри системы компонентов при помощи соответствующей конструкции схемы, но низкочастотный джиттер проходит через систему незамеченным, поскольку регенераторы такта придерживаются вариаций во входном сигнале.
Битовые ошибки возникают, когда временное соотношение между данными и скоростью отсчета, определяемой из данных, нарушается. Джиттер данных в пределах ширины полосы закрытых по фазе цепей (phase-locked loop, PLL) на входе системных компонентов почти полностью добавляется к такту отсчета, поэтому соотношение между тактом и данными сохраняется. Джиттер становится критичным, если его частоты близки к частотам раздела или выходят за пределы полосы пропускания PLL. В этом случае, только часть джиттера передается данным, приводя к искажению временного соотношения. Данные больше не отсчитываются по центру каждого бита. Тогда даже относительно малые амплитуды джиттера могут вызвать битовые ошибки.
7.3. Виды измерений фазового дрожания (джиттера) и их необходимость
Стандарты SONET и SDH включают следующие категории: генерируемое или собственное дрожание фазы, вносимое дрожание фазы и устойчивость к дрожанию фазы. В зарубежной литературе вносимое дрожание фазы обычно ассоциируют с преобразованием дрожания фазы тем или иным устройством, введённым в линию связи.
Реконструкция цифрового сигнала без ошибок зависит от устойчивости системных компонентов к джиттеру, а также от соотношения сигнал/шум. Поскольку измерения битовых ошибок обеспечивают оценку хорошо/плохо по отношению к определенным номинальным пределам, измерения джиттера позволяют обнаружить, происходят ли медленные (иначе говоря, скрытые) изменения. Это позволяет дать общую оценку устойчивости системы или всей сети к ошибкам. В частности, это важный аспект превентивного технического обслуживания для обеспечения качества сети, так как это эффективный способ предупреждения возможных сбоев системы.
7.4. Нормы на фазовые дрожания
В настоящее время определены нормы на максимальное значение дрейфа и дрожание фазы для иерархических стыков цифровых систем передачи, которые должны соблюдаться при всех эксплуатационных условиях независимо от количества оборудования, включенного в тракт перед рассматриваемым стыком [104]. При этом предельные нормы определяются в виде максимальной ошибки временного интервала, выраженного полным размахом фазового дрожания, измеренного на выходе полосовых фильтров.
Предельные нормы на дрейф фазы.
Максимальная ошибка временного интервала на стыках любых сетевых устройств за период наблюдения s > 104 секунд не должна превышать (102 * s + 104) нс. Здесь максимальная ошибка временного интервала ΔT = max[x(t)] – min[x(t)] определяется амплитудным значением изменения времени запаздывания хронирующего сигнала между двумя пиковыми отклонениями относительно идеального хронирующего сигнала в течение времени s и может быть представлена в виде рис. 7.7. При этом полный размах измеряется на выходе полосовых фильтров с частотами среза: нижней f1 и верхней f4, а также нижней f3 и верхней f4, соответственно.
Зависимость максимально допустимой ошибки временного интервала от периода наблюдения представлена на рис. 7.8, а ее сетевая предельная норма для плезиохронной цифровой иерархии приведена в табл. 7.1.
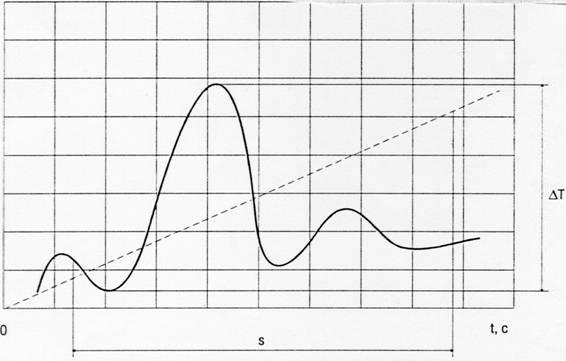
Рис. 7.7. Определение максимальной ошибки временного интервала
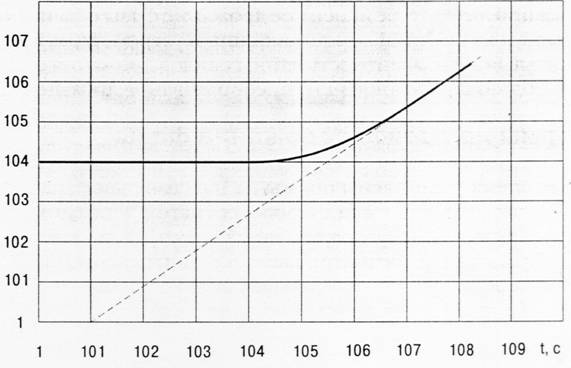
Рис 7.7. Зависимость максимально-допустимой ошибки временного интервала на входе сетевого узла
Таблица 7.1. Нормы собственного фазового дрожания
| Скорость в тракте, кбит/с | Сетевая предельная норма | Полоса измерительного фильтра | Единичный интервал, нс | |||
| Полный размах | Полный размах | F1, Гц | F3, Гц | F4, Гц | ||
| 64 | 0.25 | 0.05 | 20 | 3 | 20 | 15600 |
| 2048 | 1.5 | 0.2 | 20 | 18 | 100 | 488 |
| 8448 | 1.5 | 0.2 | 20 | 3 | 400 | 118 |
| 34368 | 1.5 | 0.15 | 100 | 10 | 800 | 29.2 |
| 139264 | 1.5 | 0.075 | 200 | 10 | 3500 | 7.15 |
Собственное фазовое дрожание имеет место на выходе оборудования при отсутствии приложенного входного фазового дрожания и может быть обнаружено в результате интегрированного измерения фазы и шума на оборудовании SONET/SDH. Уровень генерируемого фазового дрожания не должен превышать 0.01 UI среднеквадратичного значения при измерении с использованием фильтра верхних частот, имеющего граничную частоту, равную 12 кГц. Таким образом, генерируемое фазовое дрожание является показателем фазового дрожания на узле сети или на выходе конкретного устройства. Здесь следует отметить, что генерируемое фазовое дрожание определяется в терминах двойных UI на двух различных полосах частот измерения.
Таблица 7.2.
| Скорость, кбит/с | Длина участка, км | Максимальное выходное фазовое дрожание для цифрового участка | Полоса измерительного фильтра | |||
| Полосовой фильтр с нижней частотой среза f1 и f3 и верхней частотой среза f4 | ||||||
| Полный размах в (f1–f4) | Полный размах в (f3–f4) | f1, кГц | f3, кГц | f4, кГц | ||
| 2048 | 50 | 0.75 | 0.2 | 20 | 18 | 100 |
| 8448 | 50 | 0.75 | 0.2 | 20 | 3 | 400 |
| 34368 | 50 | 0.75 | 0.15 | 100 | 10 | 800 |
| 139264 | 280 | 0.75 | 0.075 | 200 | 10 | 3500 |
Данный вид фазового дрожания характерен для синхронных систем передачи, так как в них время ожидания или дрожание тактового сигнала обусловлены нерегулярностью выравнивания цифрового сигнала. Это возникает вследствие процесса подстановки битов и смещения частоты, являющегося следствием преобразования поступающего плезиохронного потока данных в синхронный поток SONET/SDH. Кроме этого, вследствие преобразования полезной нагрузки и урегулирования указателей, связанных с созданием транспортируемой полезной нагрузки SONET/SDH, может возникать и фазовое дрожание времени ожидания.
Сетевая предельная норма на собственное фазовое дрожание для плезиохронной цифровой иерархии приведена в табл. 7.
Нормы на преобразование фазового дрожания.
Преобразование фазового дрожания представляет собой изменение его уровня при передаче с входа на выход тестируемого устройства и определяется отношением амплитуды синусоидального фазового дрожания на выходе оборудования к входному синусоидальному фазовому дрожанию. Характеристики преобразования фазового дрожания помогают удостовериться в том, что оборудование, установленное в системе, не приведет к увеличению уровня фазового дрожания в любой части спектра. Так как ряд последовательно установленных устройств, каждое из которых увеличивает фазовое дрожание, может привести к образованию неуправляемого уровня фазового дрожания, спецификации SONET/SDH определяют поля допуска (допустимые пределы) преобразования последнего для различных скоростей передачи и типов регенераторов. Требования к преобразованию фазового дрожания в схеме восстановления тактовой частоты обычно допускают его небольшое увеличение до данной предельной частоты, за которой фазовое дрожание необходимо ослаблять. Как правило, если есть сбои в оборудовании, они имеют место вблизи граничной частоты схемы восстановления тактовой частоты. Измерение вносимого фазового дрожания осуществляется посредством одновременного определения уровней фазового дрожания на входе и выходе тестируемого устройства.
Рисунок 7.9. Типичная характеристика передачи дрожания фазы
Типичная характеристика передачи фазового дрожания приведена на рис.7.9, где значения уровней x и y и частот f1, f5, f6 и f7 определяются конкретным видом оборудования, но в любом случае норма на уровень усиления передачи (увеличения дрожания) не должна превышать 1 дБ.
Устойчивость к фазовому дрожанию.
Данный показатель определяет, насколько приемник способен восстанавливать исходный сигнал при наличии фазового дрожания, и определяется амплитудой поданного на вход оборудования фазомодулированного по синусоидальному закону сигнала, который вызывает соответствующее увеличение ошибок. С этой целью необходимо выполнить измерения BER при наличии соответствующего «дрожащего» сигнала. При этом устойчивость к фазовому дрожанию определяется с использованием полей допуска, каждое из которых определяет область функционирования оборудования, в которой обеспечивается требуемое значение BER.
Таблица 7.3.
| Скорость, кбит/с | Полный размах в единичных интервалах | Частота, Гц | ПСП | ||||||||||
| А0 | А1 | А2 | А3 | f0 | F10 | f9 | f8 | f1 | f2 | f3 | f4 | ||
| 64 | 1.15 | 0.25 | 0.05 | * | 1.2·10-5 | * | * | * | 20 | 600 | 3000 | 20 | 211-1 |
| 2048 | 36.9 | 1.5 | 0.2 | 18 | 1.2·10-5 | 4.88·10-3 | 0.01 | 1.667 | 20 | 2400 | 18000 | 100 | 215-1 |
| 8448 | 152 | 1.5 | 0.2 | * | 1.2·10-5 | * | * | * | 20 | 400 | 3000 | 400 | 215-1 |
| 34368 | 618 | 1.5 | 0.15 | * | * | * | * | * | 100 | 1000 | 10000 | 800 | 223-1 |
| 139264 | 2506.6 | 1.5 | 0.15 | * | * | * | * | * | 200 | 500 | 10000 | 3500 | 223-1 |
* — значения уточняются; значение А0 (18 мкс) представляет относительное фазовое смещение поступающего сигнала относительно собственного хронирующего сигнала, полученного с помощью эталонного генератора. Абсолютное значение А0 (21 мкс) составляет на входе оборудования в предположении, что максимальный дрейф тракта передачи между двумя узлами равняется 11 мкс. Согласно G.811, разница в 3 мкс соответствует такому же допуску на долговременное отклонение фазы национального эталонного задающего генератора.
Как правило, для каждой скорости передачи задается соответствующее поле допуска устойчивости к входному фазовому дрожанию, а в некоторых случаях и два поля с тем, чтобы была возможность оценивать влияние различных типов регенераторов. При этом разница между полем допуска и действительной кривой устойчивости оборудования представляет собой запас по фазовому дрожанию и характеризует его с точки зрения проходит/не проходит. Обычно при тестировании по устойчивости к фазовому дрожанию используется метод, заключающийся в ослаблении мощности сигнала без фазового дрожания до тех пор, пока не возникнут ошибки или не будет достигнуто определенное значение BER. Стандарты SONET/SDH устанавливают определенные значения фазового дрожания и частотных диапазонов, в пределах которых можно проводить измерения на совместимость оборудования.
7.5. Методы измерения фазового дрожания
Джиттер в цифровом сигнале определяется в терминах амплитуды и частоты. В общем случае джиттер измеряется в единичных интервалах (Unit intervals, UI), как показано на рис. 7.10. Амплитуда джиттера – величина расстояния от пика до пика функции передачи фазы. Если соотнести единичный интервал с длиной тактового периода, он независим от формы импульса двоичного сигнала. Он также не зависит от битовой скорости, так как привязан к тактовому периоду. Это позволяет прямое сравнение амплитуд джиттера на различных иерархиях цифрового сигнала. Джиттер обычно выражается величинами расстояний между пиками и обозначается индексом pp (peak-to-peak).
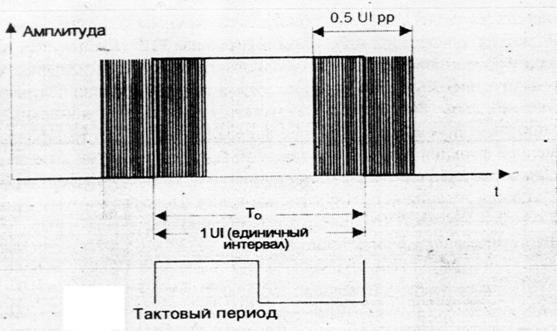
Рис.7.10. Определение единичного интервала (UI)
Величина джиттера может быть оценена должным образом только в том случае, если установлена ширина полосы, используемая для взвешивания имеющегося спектра джиттера. В противном случае, диапазон частоты джиттера и, следовательно, возможные эффекты его воздействия на поведение передачи не могут быть определены точно. Поэтому обычно выполняют два измерения с использованием разных взвешивающих полосовых фильтров. Этот метод даёт гораздо меньше информации, чем селективное по частоте измерение спектра джиттера, но позволяет получить полезные результаты с небольшими затратами. ITU-T определяет два взвешивающих фильтра для измерения джиттера, охватывающих верхние компоненты низкочастотного джиттера и нижние компоненты низкочастотного джиттера (рис. 7.11). Альтернативно, селективный анализ сигнала можно провести при помощи анализатора спектра.

Рис. 7.11. «Взвешивание» джиттера при помощи полосовых фильтров
На рис. 7.12 показана структурная схема измерителя джиттера. Сигнал с джиттером, который нужно измерить, может содержать длинные последовательности нулей. Поскольку для обычного метода измерения джиттера требуется непрерывный сигнал, для передачи возможно большего джиттера входного сигнала сигналу с регулярными изменениями состояния используется конвертор набор/такт. Как следствие, конвертор набор/такт строится на базе закрытой по фазе цепи (PLL), которая передает быстрые изменения в цифровой сигнал. Эта конверсия улучшает характеристики джиттера сигнала, но добавляет собственный джиттер конвертора набор/такт. Медленная PLL используется для задания измерителю тактового сигнала, свободного от джиттера (или, вернее, со сниженным джиттером). Функцию зависимости джиттера по времени получают простым сравнением фазы. Затем она фильтруется, и пиковые положительные и отрицательные значения определяются отдельно. Цифровая обработка отфильтрованной временной функции делает возможным обнаружение быстрых изменений в пиковом значении джиттера (например, пойнтерный джиттер). Вместо этого производители оборудования используют аналоговые фильтры, что увеличивает время отклика. Это означает, что происходит усреднение сигнала, и реальное пиковое значение нельзя определить точно.

Рис. 7.12. Структурная схема измерителя джиттера
На выходе демодулятора получают функцию зависимости джиттера по времени для дальнейшей обработки. Если подать её на селективный вольтметр или анализатор спектра, то можно точно определить спектр джиттера.
Собственное фазовое дрожание данных и тактовых импульсов и преобразование фазового дрожания могут быть измерены непосредственно с помощью высокоскоростного цифрового осциллографа. Как показано на рис. 7.13, независимый от фазового дрожания сигнал запуска развертки осциллографа обеспечивается источником тактового сигнала (таймером 2), частота которого зафиксирована на уровне частоты источника тактового сигнала (таймера 1). При этом таймер 1, модулируемый генератором фазового дрожания, управляет генератором тестовых кодов, который подает данные, подверженные фазовому дрожанию, на тестируемое устройство для измерения преобразования фазового дрожания. Входной и выходной сигналы в этом случае могут быть проанализированы с использованием встроенных гистограммных функций осциллографа. Однако метод измерения с использованием осциллографа имеет несколько ограничений. Во-первых, максимальная амплитуда фазового дрожания, которая может быть измерена, ограничивается до 1 UI. Во-вторых, из-за высокого уровня собственных шумов, вызванных использованием широкой полосы частот, этот метод обладает низкой чувствительностью. Кроме этого, данный метод не дает никакой информации относительно спектральных характеристик или временной функции фазового дрожания. Наконец, метод требует дополнительного источника тактовых сигналов для создания сигнала запуска осциллографа.
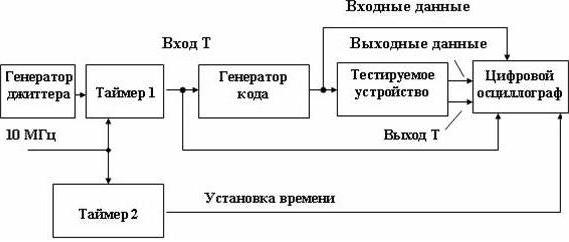
Рис 7.13. Схема измерения дрожания фазы с помощью осциллографа
Многие ограничения измерения фазового дрожания с помощью осциллографа могут быть преодолены использованием фазового детектора (рис. 7.14), который сравнивает фазу восстановленного тактового сигнала тестируемого устройства или оборудования со свободным от фазового дрожания источником тактового сигнала. В этом случае напряжение на выходе фазового детектора пропорционально фазовому дрожанию сигнала с восстановленной тактовой частотой, причем диапазон фазового детектора может быть расширен за пределы 1 UI с использованием делителя частоты.

Рисунок 7.14. Схема измерения фазового дрожания фазовым детектором
Собственное фазовое дрожание в этом случае измеряется путем подключения к выходу фазового детектора вольтметра с соответствующими полосовыми фильтрами или радиочастотного анализатора спектра. Для измерения преобразования фазового дрожания к выходу фазового детектора может быть подключен также низкочастотный анализатор спектра.
Метод фазового детектора создает основу для множества устройств измерения фазового дрожания, отличается простотой использования и обеспечивает быстрое измерение собственного фазового дрожания. Однако существует несколько ограничений в использовании данного метода. Система измерения фазового дрожания, использующая фазовый детектор, обычно состоит из специального устройства, работающего только на определенных скоростях передачи данных. Кроме этого, точность измерения преобразования фазового дрожания при помощи анализатора спектра может быть недостаточна для того, чтобы гарантировать точность, соответствующую требованиям используемого стандарта. Наконец, этот метод требует использования дополнительного источника тактового сигнала в качестве образцового сигнала для фазового детектора.
Может возникнуть вопрос: почему нельзя использовать радиочастотный анализатор спектра для прямого наблюдения за спектром данных. Это связано с тем, что вследствие сложных последовательностей данных в спектрограмме будет присутствовать определенное количество линий, значительно затрудняющих анализ результатов измерений. Обычно анализатор спектра подходит только для измерения дискретных компонентов фазового дрожания в сигнале с восстановленной тактовой частотой и не может использоваться для измерения собственного выходного фазового дрожания сетевых элементов.
В настоящее время измерение фазового дрожания может осуществляться также посредством измерителей частоты и временных интервалов по фронтам цифровых импульсов с последующим преобразованием временной и фазовой информации в цифровую форму. Данные методы могут использоваться для непосредственного измерения собственного фазового дрожания сигнала с восстановленной тактовой частотой при наличии входного сигнала без фазового дрожания в качестве эталона.
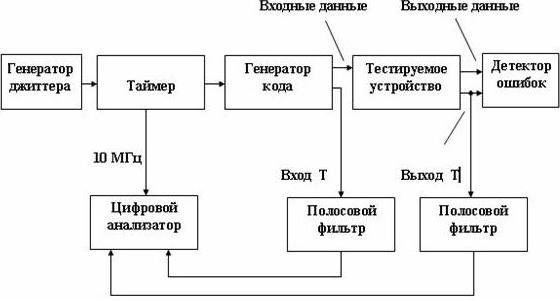
Рисунок 7.15. Измерение фазового дрожания цифровым анализатором.
Однако этот метод измерения фазового дрожания обладает ограниченными возможностями измерения преобразования фазового дрожания и контроля устойчивости оборудования к фазовому дрожанию.
Всесторонне решение проблемы измерения фазового дрожания представляют приборы, основанные на использовании образцовых сигналов (рис. 7.15). Обычно эти приборы функционируют, выбирая образцовые интервалы времени с последующим анализом отобранных данных методами обработки цифрового сигнала. Таким образом, данные устройства обладают встроенной функцией фазовой демодуляции и включают генератор тестовых кодов, детектор ошибок и источник сигнала тактовой частоты, а для модуляции фазового дрожания в них используется генератор синтезированного сигнала.
7.6. Техника измерения и тестирования фазового дрожания
В зависимости от рассмотренных методов и средств измерения фазового дрожания различаются и подходы к процедурам измерений, реализующим данные методы, однако имеется ряд общих черт, позволяющих изложить технику измерений фазового дрожания с единых позиций, что, в свою очередь, позволит при необходимости модифицировать приведенные ниже приемы измерений к имеющемуся оборудованию.
7.6.1. Измерение выходного фазового дрожания
Измерения выходного фазового дрожания выполняются с использованием либо сигнала реальной нагрузки, либо управляемых испытательных последовательностей, каждый из которых имеет свою специфику.
Измерение выходного фазового дрожания при реальной нагрузке. Данный метод заключается в демодуляции, избирательной фильтрации и измерении эффективного или амплитудного значения синусоидального фазового дрожания реальной нагрузки на выходе сетевого стыка в определенном интервале времени. С этой целью может быть использовано, например, устройство, представленное на рис. 7.14, в соответствии с которым [14] для измерения фазового дрожания необходимо выполнить следующую последовательность процедур:
1. Убедиться, что измеряемый объект работает без ошибок.
2. Выбрать нужный фильтр измерения фазового дрожания и измерить выходное фазовое дрожание в данной полосе частот, регистрируя истинное значение амплитуды полного размаха, возникающей в течение заданного интервала времени.
3. Повторить предыдущую операцию для всех нужных фильтров измерения фазового дрожания.
Измерение собственного фазового дрожания с использованием управляемых цифровых последовательностей.
Основной метод измерения собственного фазового дрожания заключается в подаче на испытываемое оборудование управляемой испытательной последовательности без фазового дрожания (рис. 7.13, 7.14). Этот метод обычно используется в лабораторных и заводских условиях, а также при выводе испытуемого объекта из эксплуатации. Последовательность процедур измерения при этом включает:
1. Подключение генератора управляемой цифровой последовательности и подтверждение, что измеряемый объект работает без ошибок.
2. Выбор необходимого фильтра и измерение фазового дрожания в установленной полосе частот, регистрацию значения амплитуды полного размаха, имеющего место в течение заданного интервала времени.
3. Повторение предыдущей операции для всех требуемых фильтров измерения фазового дрожания.
7.6.2. Измерение преобразования фазового дрожания
Измерение преобразования фазового дрожания выполняется путем сравнения фазовых дрожаний, вводимых в линейный тракт, с возникающими в нем фазовыми дрожаниями. При этом измерения проводятся на стоечной станции посредством измерителя фазового дрожания, например, с разрешающей способностью, равной 0.001 · Т в диапазоне (0.005 — 20) · Т, где Т = 1/F, n · Т – тактовый интервал измерения; n = 1,2,3…N.
Перед измерением на передающей станции вначале по измерителю оптической мощности устанавливают необходимый уровень оптического излучения, а на генераторе испытательных сигналов – калиброванную частоту и калиброванный уровень фазового дрожания, причем данные параметры задаются исходя из технических условий на аппаратуру линейного тракта системы передачи. Затем, изменяя значение i-ого фазового дрожания J, на генераторе, полученное на выходе фазовое дрожание определяют по формуле
![]() , (7.1)
, (7.1)
где
![]() ;
;  ;
;![]()
![]() и
и ![]() — соответственно погрешность измерения и среднее значение фазового дрожания при пяти и более измерениях, проведенных с интервалом 3 мин.
— соответственно погрешность измерения и среднее значение фазового дрожания при пяти и более измерениях, проведенных с интервалом 3 мин.
7.6.3. Измерение допустимого фазового дрожания
Как было отмечено выше, допустимое значение фазового дрожания определяется как амплитуда синусоидального фазового дрожания, которое при подаче на вход тракта или аппаратуры вызывает заданное ухудшение показателя ошибок. Естественно, что допустимое отклонение фазового дрожания зависит от амплитуды и от частоты поданного фазового дрожания, а нормированное ухудшение показателя ошибок может выражаться либо увеличением BER, либо моментом времени появления ошибок. Несмотря на кажущуюся идентичность данных критериев, они не являются равнозначными. Так, первый метод позволяет определить (независимо от условий) воздействие фазового дрожания на схему решения – ее способность точно восстанавливать хронирующий сигнал из информационного потока с фазовым дрожанием и другими факторами ухудшения качества передачи, как, например, искажение импульсов, переходное затухание, шум и др.
Второй метод рекомендуется использовать в тех случаях, когда необходимо выдерживать динамически меняющуюся скорость входного цифрового информационного сигнала, например, осуществляя цифровое выравнивание при выходе из синхронизма в асинхронной цифровой аппаратуре группообразования.
Здесь следует отметить, что эталонный хронирующий сигнал для фазового детектора может быть получен выделением тактовой частоты из принимаемого сигнала или от внутреннего генератора передающей части прибора.
Тестирование фазового дрожания по критерию увеличения BER. Критерий увеличения BER для измерения допустимого значения фазового дрожания на заданной частоте определяется как амплитуда фазового дрожания, удваивающего BER, что обусловлено определенным уменьшением отношения сигнал/шум. Процедура измерения согласно данному методу [104] делится на два этапа:
1. В зависимости от отношения сигнал/шум в эталонных точках измеряемого объекта определяются два значения BER, для чего при нулевом фазовом дрожании сигнал либо ослабляется, либо к нему добавляется шум, при котором имеет место первоначальное значение BER, затем ослабление или шум снижаются до момента, когда BER уменьшится в два раза.
2. На определенной частоте в испытательный сигнал вводится фазовое дрожание, значение которого увеличивается до получения первоначально задаваемого BER, реализуя тем самым воспроизводимую меру допустимого фазового дрожания схемы решения и повторяя данный процесс на различных частотах с тем, чтобы результат измерения соответствовал постоянному допуску синусоидального входного фазового дрожания для испытываемого объекта в требуемом диапазоне частот.
На рис. 7.16 представлена схема измерения, применяемая для метода по критерию увеличения BER, где устройства, отмеченные пунктиром, обеспечивают большую точность установки частот и возможность контроля амплитуды генерируемого фазового дрожания.
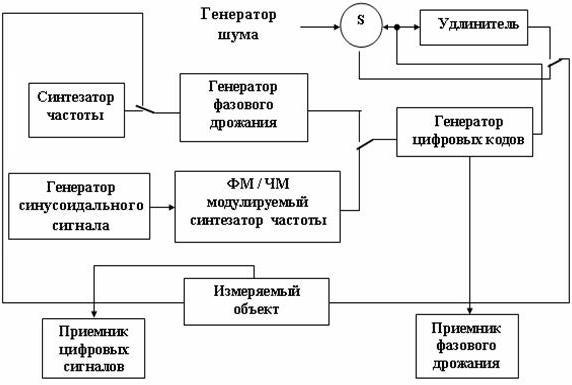
Рис. 7.16. Схема измерения допустимого фазового дрожания по критерию увеличения ошибок
Согласно данной схеме, для измерения допустимого значения фазового дрожания необходимо выполнить следующую последовательность процедур:
1. Убедиться, что измеряемый объект работает без ошибок.
2. При отсутствии фазового дрожания увеличить шум (ослабить сигнал) до получения не менее 100 ошибок по битам в сек.
3. Зарегистрировать соответствующий BER и отношение сигнал/шум.
4. Увеличить отношение сигнал/шум на определенную величину.
5. Установить частоту входного фазового дрожания на нужное значение.
6. Регулированием амплитуды фазового дрожания достичь первоначального значения BER, зарегистрированного в 3.
7. Зарегистрировать амплитуду и частоту поданного входного фазового дрожания и повторить операции 4, 5 с числом частот, достаточным для определения характеристики допустимого фазового дрожания.
Тестирование фазового дрожания по критерию появления ошибок. Критерий появления ошибок для измерения допустимого значения фазового дрожания определяется на заданной частоте как наибольшая амплитуда фазового дрожания, при увеличении которой в последовательных 30-секундных интервалах измерений имеют место не более двух секунд с ошибками. Данный метод заключается в регулировке частоты фазового дрожания испытательного сигнала, обеспечивающего тот или иной критерий появления ошибок, и включает [14] следующие этапы:
1. Исключение амплитуды фазового дрожания, при которой прекращается безошибочная работа измеряемого объекта.
2. Измерение отдельных секунд с ошибками в течение 30 секунд при каждом увеличении амплитуды фазового дрожания, начиная с области, установленной в первом пункте.
3. Определение наибольшей амплитуды фазового дрожания, при которой общее число секунд с ошибками не превышает двух.
Аналогично рассмотренному выше методу, процесс повторяется для такого количества частот, при котором результат измерения будет точно отражать допустимое входное синусоидальное фазовое дрожание в необходимом диапазоне частот.
На рис. 7.17 представлена схема измерения, применяемая для метода по критерию появления ошибок, согласно которой для измерения допустимого значения фазового дрожания необходимо выполнить следующую последовательность процедур:
1. Убедиться, что измеряемый объект работает без ошибок.
2. Установить частоту входного фазового дрожания на нужное значение и отрегулировать амплитуду последнего на 0 единичных интервалов полного размаха.
3. Увеличить амплитуду фазового дрожания с помощью грубой регулировки для определения области амплитуд, в которой прекращается безошибочная работа, а затем уменьшить амплитуду фазового дрожания до уровня, при котором начинается эта область.
4. Зарегистрировать число секунд с ошибками в 30-секундном интервале.
5. Плавно увеличить амплитуду фазового дрожания, повторяя процедуру до удовлетворения критерия появления ошибок.
6. Зарегистрировать отображаемую измерительным устройством амплитуду и повторить операции 2-5 с числом частот, допустимым для определения характеристики допустимого фазового дрожания.
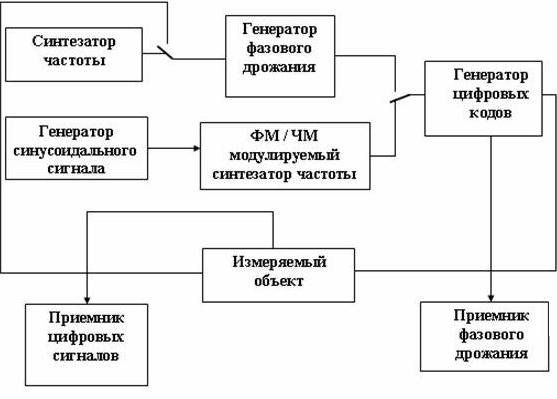
Рис. 7.17. Схема измерения допустимого фазового дрожания по критерию появления ошибок
Тестирование на соответствие допустимого фазового дрожания установленным нормам. Так как норма определяет ту область, в которой оборудование должно работать без снижения нормированного показателя ошибок, разность между нормой, задаваемой шаблоном, и измеренной характеристикой допуска оборудования показывает запас по фазовому дрожанию. Тестирование на соответствие норме осуществляется путем установления частоты и амплитуды фазового дрожания по шаблону с последующим контролем за отсутствием нормированного снижения показателя ошибок. Измерение производится для числа точек шаблона, удовлетворяющего критерию соответствия нормам во всем диапазоне частот шаблона, и включает следующую последовательность процедур:
1. Проверку, что измеряемый объект работает без ошибок.
2. Установку амплитуды и частоты фазового дрожания согласно одной из точек шаблона.
3. Подтверждение отсутствия секунд с ошибками при измерении по критерию появления ошибок или подтверждение, что нормированное снижение показателя ошибок не достигнуто при измерении по критерию ухудшения BER.
4. Повторение операций 2-3 по достаточному числу точек шаблона для того, чтобы удостовериться в соответствии шаблону допуска на фазовое дрожание.