Выводы
теории статистических решений могут
быть успешно применены при обнаружении
сигналов. При бинарном обнаружении на
входе устройства обнаружения либо
присутствует сигнал о наличии объекта
(состояние A1),
либо этот сигнал отсутствует (состояние
A0
). Устройство обнаружения при любом
состоянии на входе может принимать два
решения: либо решение о наличии сигнала
(решение
![]() ),
),
либо решение об отсутствии сигнала
(решение![]() ).
).
Тогда при работе такого устройства
возможны четыре случая:
1.
Сигнал на входе устройства присутствует
(состояние A1),
и устройство обнаружения принимает
решение
![]() о наличии сигнала. Такая ситуация
о наличии сигнала. Такая ситуация
называется правильным обнаружением, и
безусловная вероятность существования
такой ситуации
![]()
где
![]() – условная вероятность правильного
– условная вероятность правильного
обнаружения.
2.
Сигнал на входе устройства отсутствует
(состояние A0),
и устройство обнаружения принимает
решение
![]() об отсутствии сигнала. Такая ситуация
об отсутствии сигнала. Такая ситуация
называется правильным необнаружением,
и безусловная вероятность существования
такой ситуации
![]()
где
![]() – условная вероятность правильного
– условная вероятность правильного
необнаружения.
3.
Сигнал на входе устройства отсутствует
(состояние A0
), но устройство обнаружения принимает
решение
![]() о наличии сигнала (ошибка первого рода).
о наличии сигнала (ошибка первого рода).
Такая ситуация называется ложной
тревогой, и безусловная вероятность
существования такой ситуации
![]() (2.6)
(2.6)
где
![]() – условная вероятность ложной тревоги.
– условная вероятность ложной тревоги.
4.
Сигнал на входе устройства присутствует
(состояние A1),
но устройство обнаружения принимает
решение
![]() об отсутствии сигнала (ошибка второго
об отсутствии сигнала (ошибка второго
рода). Такая ситуация называется пропуском
цели, и безусловная вероятность
существования такой ситуации
![]() (2.7)
(2.7)
где
![]() – условная вероятность пропуска цели.
– условная вероятность пропуска цели.
Нетрудно
убедиться, что
![]() т. е. из четырех условных вероятностей
т. е. из четырех условных вероятностей
независимыми являются только две. Из
предыдущего ясно также, что соотношением
между![]() и
и![]() ,
,![]() и
и![]() можно управлять, изменяя порогl0
можно управлять, изменяя порогl0
в выражении
(3.5). Таким образом, встает задача об
оптимальном выборе значения порога
отношения правдоподобия l0.
2.4. Критерии оптимального обнаружения
В
зависимости от имеющейся априорной
информации о свойствах сигнала и помехи
и от опасности ошибок первого и второго
родов предложены различные критерии
для выбора порога l0.
Если известна априорная вероятность
появления сигнала и ошибкам первого и
второго родов можно приписать определенные
стоимости или штрафы, то можно говорить
о некотором среднем риске r
принятия неправильного решения:
![]()
где
rF
– стоимость риска ложной тревоги;
![]() – стоимость риска пропуска цели. Если
– стоимость риска пропуска цели. Если
учесть равенства (2.6) и (2.7), а также то,
чтоP(A0)=1- P(A1)
, выражение для среднего риска можно
записать в виде
![]()
Поскольку
в соответствии с выражениями (2.2) и (2.3)
вероятности ошибок PF
и
![]() зависят от разбиения области существования
зависят от разбиения области существования
переменной (в нашем случае – области
значений принятого колебанияx(t))
на подобласти, т. е. от выбора порога
l0
, то, минимизируя средний риск
![]() при измененииl0,
при измененииl0,
можно получить оптимальное значение
порога. Этот критерий носит название
критерия минимума среднего риска или
критерия Байеса. Он применим в случае,
когда можно указать стоимости ошибок
rF
и
![]() и известна вероятность появления сигнала
и известна вероятность появления сигнала
(объекта)Р(A1).
В
частном случае, если опасности ложной
тревоги и пропуска цели одинаковы, т. е.
![]() критерий минимума среднего риска
критерий минимума среднего риска
переходит в критерий идеального
наблюдателя или критерий Зигерта-Котельникова:
![]()
Критерий
идеального наблюдателя, как и критерий
Байеса, требует знания вероятности
появления сигнала (объекта). Однако
зачастую при решении задач обнаружения
эта вероятность заранее не известна.
Часто нельзя указать и стоимости ошибок.
В этих случаях применяется критерий
Неймана-Пирсона. Согласно этому критерию,
задаются некоторым малым допустимым
значением вероятности ложной тревоги
PF
и требуют максимизации вероятности
правильного обнаружения PD.
При известной статистике (плотности
распределения вероятностей) помехи по
заданной условной вероятности PF
можно определить пороговое значение
l0
и по нему – условную вероятность
правильного обнаружения.![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Рассмотрим методы анализа помехоустойчивости систем
обнаружения сигналов, т.е. методы расчета вероятности ложной тревоги (3.1) и
вероятности пропуска сигнала (3.2) (или вероятности правильного обнаружения
(3.3)). Подобные расчеты являются обязательным этапом проектирования систем
обнаружения, осуществляемым после синтеза оптимального алгоритма.
Как было показано в п.3.1, оптимальный по нескольким
критериям качества алгоритм обнаружения сигналов состоит в сравнении с порогом
отношения правдоподобия. Для независимых отсчетов ![]() входного процесса такой алгоритм может
входного процесса такой алгоритм может
быть записан в форме произведения
 (3.18)
(3.18)
После логарифмирования (3.18) процедура обработки приводится к виду:
![]() , (3.19)
, (3.19)
где ![]() .
.
Таким образом, для расчета вероятностей
 (3.20)
(3.20)
необходимо найти ПРВ ![]() и
и ![]() и вычислить интегралы (3.20). Поскольку
и вычислить интегралы (3.20). Поскольку
для расчета (3.20) при известных ПРВ ![]() и
и ![]() могут эффективно использоваться численные
могут эффективно использоваться численные
методы интегрирования, то, как правило, наиболее трудоемким является
определение ПРВ суммы ![]() СВ
СВ
![]() , полученных,
, полученных,
вообще говоря, нелинейным преобразованием ![]() .
.
Условные законы распределения каждого слагаемого ![]() находят с помощью
находят с помощью
формулы (1.36). Для рассматриваемой задачи выражение (1.36) перепишется в виде:
 . (3.21)
. (3.21)
Заметим, что в правой части (3.21) необходимо заменить ![]() на функцию
на функцию ![]() , полученную в
, полученную в
результате решения уравнения ![]() относительно
относительно ![]() .
.
После нахождения ПРВ (3.21) требуется определить законы
распределения суммы ![]() независимых
независимых
СВ ![]() . Для этого
. Для этого
используется либо точный подход, основанный на вычислении характеристических
функций (1.39), либо приближенный, базирующийся на центральной предельной
теореме теории вероятностей.
Точный расчет характеристик обнаружения осуществляется
следующим образом. Вначале находятся характеристические функции слагаемых:
 . (3.22)
. (3.22)
Затем характеристические функции суммы ![]() определяются как произведения
определяются как произведения
характеристических функции слагаемых:
 . (3.23)
. (3.23)
Наконец, с помощью обратного преобразования Фурье (1.39) вычисляются
искомые ПРВ.
 . (3.24)
. (3.24)
В качестве примера проведем расчет характеристик алгоритма
обнаружения (3.11)  ,
,
синтезированного для релеевских ПРВ (3.9), (3.10).
При наличии полезного сигнала ПРВ слагаемых ![]() могут быть найдены с
могут быть найдены с
помощью формулы (3.21)
![]() ,
,
где ![]() .
.
Характеристические функции имеет один и тот же вид
 для
для
всех слагаемых. Поэтому легко находится характеристическая функция суммы ![]() независимых СВ
независимых СВ
![]() .
.
Интеграл в обратном преобразовании Фурье (3.24)

наиболее просто вычисляется с помощью вычетов. Интегрируя
последнее выражение еще раз с помощью таблиц [25], получаем следующую расчетную
формулу для вероятности правильного обнаружения
 , (3.25)
, (3.25)
где ![]() –
–
неполная гамма-функция, табулированная, например, в [28]; ![]() .
.
При отсутствии полезного сигнала изменяется лишь параметр ![]() , но все приведенные
, но все приведенные
преобразования остаются справедливыми. Поэтому вероятность ложной тревоги
также находится по формуле (3.25), если положить, что ![]() :
:
 . (3.26)
. (3.26)
В радиолокационных задачах обнаружения полученные формулы
(3.25) и (3.26) обычно используются следующим образом. По заданной вероятности
ложной тревоги ![]() из
из
соотношения (3.26) определяют порог обнаружения ![]() . При этом удобно использовать широко
. При этом удобно использовать широко
распространенные таблицы распределения ![]() [29], поскольку
[29], поскольку
 ,
,
где ![]() –
–
табулированная функция (распределение ![]() [29]). После определения
[29]). После определения ![]() формула (3.25)
формула (3.25)
позволяет рассчитать характеристики обнаружения, т.е. зависимость вероятности
правильного обнаружения ![]() от величины отношения сигнал/шум
от величины отношения сигнал/шум ![]() . Такие характеристики
. Такие характеристики
приведены на рис.3.3 для двух значений вероятностей ложной тревоги ![]() и
и ![]() при
при ![]() . Соответствующие значения порога
. Соответствующие значения порога
обнаружения ![]() и
и
![]()
![]() находятся по формуле
находятся по формуле
(3.26).
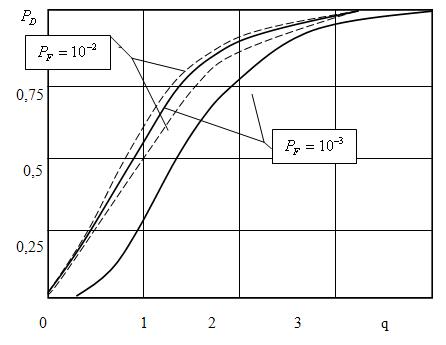
Рис. 3.3. Характеристики обнаружения сигналов
С помощью характеристик обнаружения можно по заданным
значениям ![]() и
и ![]() определить необходимую
определить необходимую
величину порогового сигнала ![]() , обеспечивающую требуемое качество
, обеспечивающую требуемое качество
обнаружения.
Рассмотренный метод дает возможность рассчитывать точные
характеристики обнаружения сигналов. Однако во многих задачах возникают
значительные, а иногда и непреодолимые, математические трудности,
связанные, чаще всего, с нахождением обратного преобразования Фурье (3.24). В
подобных ситуациях используют приближенный метод расчета характеристик,
заключающийся в следующем. Если ![]() велико и дисперсии
велико и дисперсии ![]() ограничены, то распределение
ограничены, то распределение
суммы большого числа независимых СВ ![]() согласно центральной предельной теореме
согласно центральной предельной теореме
приближается к нормальному [1-4,15]:
 , (3.27)
, (3.27)
где ![]() и
и
![]() – условные
– условные
математические ожидания и дисперсии ![]() , когда справедливы гипотезы
, когда справедливы гипотезы ![]() и
и ![]() соответственно. Параметры (3.27)
соответственно. Параметры (3.27)
обычно могут быть вычислены достаточно просто,
поскольку ![]()
![]()
![]() ,
, ![]()
причем, с учетом основной теоремы (1.37) о математическом
ожидании,
 . (3.28)
. (3.28)
После выполнения указанных преобразований искомые вероятности
 (3.29)
(3.29)
находятся по таблицам функции Лапласа. Рассматривая в качестве
примера правило ![]() обнаружения
обнаружения
релеевского сигнала, запишем последовательно

Полагая ![]() и
и
![]() , по таблицам
, по таблицам
функции Лапласа [5] находим ![]() и
и ![]() соответственно. Сравнивая теперь эти
соответственно. Сравнивая теперь эти
значения с пороговыми уровнями ![]() и
и ![]() , рассчитанными с помощью точного
, рассчитанными с помощью точного
соотношения (3.26), видим, что погрешность выше при меньшей вероятности ложной
тревоги.
Для оценки применимости метода аппроксимации нормальным
распределением в рассматриваемом примере на рис.3.3 нанесены пунктирные
кривые, найденные с помощью приближенной формулы (3.30). Анализ
приведенных зависимостей показывает, что приближенный метод приводит к
значительным погрешностям при вероятности ложной тревоги ![]() . Вместе с тем
. Вместе с тем
погрешность при ![]() во многих
во многих
задачах может считаться допустимой. Кроме того, следует отметить,
что приведенные погрешности соответствуют относительно малому значению ![]() , принятому в данной
, принятому в данной
задаче. При обработке большего числа наблюдений погрешности за счет нормальной
аппроксимации заметно уменьшаются, и при ![]() точность приближенного метода, как
точность приближенного метода, как
правило, становится удовлетворительной.
К сожалению, в общем случае нельзя дать достаточно надежную
аналитическую оценку погрешности, возникающей при замене действительного
распределения суммы ![]() нормальным.
нормальным.
Поэтому при использовании приближенного метода расчета характеристик
обнаружения необходимо применять те или иные приемы обеспечения достаточной
степени уверенности в справедливости найденных результатов. Одним из таких
приемов является метод статистического моделирования [10,31]. Суть метода
заключается в формировании с помощью ЭВМ последовательности ![]() псевдослучайных выборок
псевдослучайных выборок ![]() с ПРВ
с ПРВ ![]() , где
, где ![]() , вычислении для каждой
, вычислении для каждой
выборки суммы ![]() ,
,
и построении на основе случайных чисел ![]() , гистограммы
, гистограммы ![]() , аппроксимирующей искомую ПРВ
, аппроксимирующей искомую ПРВ ![]() . Совершенно аналогично
. Совершенно аналогично
формируется гистограмма ![]() , позволяющая дать оценку
, позволяющая дать оценку ![]() вероятности правильного
вероятности правильного
обнаружения ![]() .
.
При этом погрешности оценивания вероятностей ![]() и
и ![]() зависят лишь от величин
зависят лишь от величин ![]() или
или ![]() и числа
и числа ![]() экспериментов, т.е., в принципе,
экспериментов, т.е., в принципе,
могут быть сделаны сколь угодно малыми при достаточно больших объемах
вычислений на ЭВМ.
Действительно, рассмотрим оценку ![]() , в качестве которой используется частота
, в качестве которой используется частота ![]() , где
, где ![]() – число превышений суммой
– число превышений суммой
![]() порогового
порогового
уровня ![]() в
в
серии из ![]() опытов.
опытов.
Поскольку ![]() подчиняется
подчиняется
биномиальному закону распределения (1.7) с параметром ![]() , то дисперсия ошибки оценивания
, то дисперсия ошибки оценивания
вероятности правильного обнаружения определяется следующим образом:
 .
.
Аналогично и ![]() . Итак, задавая погрешности оценивания
. Итак, задавая погрешности оценивания ![]() или
или ![]() , можно с помощью этих формул
, можно с помощью этих формул
определить необходимое число ![]() повторений эксперимента.
повторений эксперимента.
Метод статистического моделирования во многих случаях
требует проведения очень большого числа экспериментов и, следовательно,
значительного машинного времени. Например, при ![]() получаем
получаем ![]() , и общее количество
, и общее количество ![]() формируемых на ЭВМ
формируемых на ЭВМ
псевдослучайных чисел, а также операций по вычислению ![]() весьма велико. Для современных
весьма велико. Для современных
ЭВМ решение задач статистического моделирования часто требует десятков или
сотен часов непрерывной работы. Поэтому анализ помехоустойчивости радиосистем
требует в сложных случаях искусного сочетания аналитических методов и
экспериментов на ЭВМ.
4.7.1. Вероятность появления ошибочного бита при когерентном обнаружении сигнала BPSK
4.7.2. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в дифференциальной модуляции BPSK
4.7.3. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
4.7.4. Вероятность появления ошибочного бита при некогерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
4.7.5. Вероятность появления ошибочного бита для бинарной модуляции DPSK
4.7.6. Вероятность ошибки для различных модуляций
4.7.1. Вероятность появления ошибочного бита при когерентном обнаружении сигнала BPSK
Важной мерой производительности, используемой для сравнения цифровых схем модуляции, является вероятность ошибки, РЕ Для коррелятора или согласованного фильтра вычисление РЕ можно представить геометрически (см. рис. 4.6). Расчет РЕ включает нахождение вероятности того, что при данном векторе переданного сигнала, скажем si вектор шума n выведет сигнал из области 1. Вероятность принятия детектором неверного решения называется вероятностью символьной ошибки, рE. Несмотря на то что решения принимаются на символьном уровне, производительность системы часто удобнее задавать через вероятность битовой ошибки (Ps). Связь РВ и РЕ рассмотрена в разделе 4.9.3 для ортогональной передачи сигналов и в разделе 4.9.4 для многофазной передачи сигналов.
Для удобства изложения в данном разделе мы ограничимся когерентным обнаружением сигналов BPSK. В этом случае вероятность символьной ошибки — это то же самое, что и вероятность битовой ошибки. Предположим, что сигналы равновероятны. Допустим также, что при передаче сигнала ![]() принятый сигнал r(t) равен
принятый сигнал r(t) равен ![]() , где n(t) — процесс AWGN; кроме того, мы пренебрегаем ухудшением качества вследствие введенной каналом или схемой межсимвольной интерференции. Как показывалось в разделе 4.4.1, антиподные сигналы
, где n(t) — процесс AWGN; кроме того, мы пренебрегаем ухудшением качества вследствие введенной каналом или схемой межсимвольной интерференции. Как показывалось в разделе 4.4.1, антиподные сигналы ![]() и
и ![]() можно описать в одномерном сигнальном пространстве, где
можно описать в одномерном сигнальном пространстве, где
 (4.74)
(4.74)
Детектор выбирает ![]() с наибольшим выходом коррелятора
с наибольшим выходом коррелятора ![]() ; или, в нашем случае антиподных сигналов с равными энергиями, детектор, используя формулу (4.20), принимает решение следующего вида.
; или, в нашем случае антиподных сигналов с равными энергиями, детектор, используя формулу (4.20), принимает решение следующего вида.
![]() (4.74)
(4.74)
Как видно из рис. 4.9, возможны ошибки двух типов: шум так искажает переданный сигнал ![]() , что измерения в детекторе дают отрицательную величину z(T), и детектор выбирает гипотезу H2, что был послан сигнал s2(t). Возможна также обратная ситуация: шум искажает переданный сигнал
, что измерения в детекторе дают отрицательную величину z(T), и детектор выбирает гипотезу H2, что был послан сигнал s2(t). Возможна также обратная ситуация: шум искажает переданный сигнал ![]() , измерения в детекторе дают положительную величину z(T), и детектор выбирает гипотезу Н1, соответствующую предположению о передаче сигнала
, измерения в детекторе дают положительную величину z(T), и детектор выбирает гипотезу Н1, соответствующую предположению о передаче сигнала ![]() .
.
В разделе 3.2.1.1 была выведена формула (3.42), описывающая вероятность битовой ошибки РB для детектора, работающего по принципу минимальной вероятности ошибки.
 (4.76)
(4.76)
Здесь σ0 — среднеквадратическое отклонение шума вне коррелятора. Функция Q(x), называемая гауссовым интегралом ошибок, определяется следующим образом.
 (4.77)
(4.77)
Эта функция подробно описывается в разделах 3.2 и Б.3.2.
Для передачи антиподных сигналов с равными энергиями, таких как сигналы в формате BPSK, приведенные в выражении (4.74), на выход приемника поступают следующие компоненты: ![]() , при переданном сигнале
, при переданном сигнале ![]() , и
, и ![]() , при переданном сигнале s2(t), где Еь — энергия сигнала, приходящаяся на двоичный символ. Для процесса AWGN дисперсию шума
, при переданном сигнале s2(t), где Еь — энергия сигнала, приходящаяся на двоичный символ. Для процесса AWGN дисперсию шума ![]() вне коррелятора можно заменить N0/2 (см. приложение В), так что формулу (4.76) можно переписать следующим образом.
вне коррелятора можно заменить N0/2 (см. приложение В), так что формулу (4.76) можно переписать следующим образом.
 (4.78)
(4.78)
 (4.79)
(4.79)
Данный результат для полосовой передачи антиподных сигналов BPSK совпадает с полученными ранее формулами для обнаружения антиподных сигналов с использованием согласованного фильтра (формула (3.70)) и обнаружения узкополосных антиподных сигналов с применением согласованного фильтра (формула (3.76)). Это является примером описанной ранее теоремы эквивалентности. Для линейных систем теорема эквивалентности утверждает, что на математическое описание процесса обнаружения не влияет сдвиг частоты. Как следствие, использование согласованных фильтров или корреляторов для обнаружения полосовых сигналов (рассмотренное в данной главе) дает те же соотношения, что были выведены ранее для сопоставимых узкополосных сигналов.
4.7.2. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в дифференциальной модуляции BPSK
Сигналы в канале иногда инвертируются; например, при использовании когерентного опорного сигнала, генерируемого контуром ФАПЧ, фаза может быть неоднозначной. Если фаза несущей была инвертирована при использовании схемы DPSK, как это скажется на сообщении? Поскольку информация сообщения кодируется подобием или отличием соседних символов, единственным следствием может быть ошибка в бите, который инвертируется, или в бите, непосредственно следующим за инвертированным. Точность определения подобия или отличия символов не меняется при инвертировании несущей. Иногда сообщения (и кодирующие их сигналы) дифференциально кодируются и когерентно обнаруживаются, чтобы просто избежать неопределенности в определении фазы.
Вероятность появления ошибочного бита при когерентном обнаружении сигналов в дифференциальной модуляции PSK (DPSK) дается выражением [5].
 (4.80)
(4.80)
Это соотношение изображено на рис. 4.25. Отметим, что существует незначительное ухудшение достоверности обнаружения по сравнению с когерентным обнаружением сигналов в модуляции PSK. Это вызвано дифференциальным кодированием, поскольку любая отдельная ошибка обнаружения обычно приводит к принятию двух ошибочных решений. Подробно вероятность ошибки при использовании наиболее популярной схемы — когерентного обнаружения сигналов в модуляции DPSK — рассмотрена в разделе 4.7.5.
Рис. 4.25. Вероятность появления ошибочного бита для бинарных систем нескольких типов
4.7.3. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
Формулы (4.78) и (4.79) описывают вероятность появления ошибочного бита для когерентного обнаружения антиподных сигналов. Более общую трактовку для когерентного обнаружения бинарных сигналов (не ограничивающихся антиподными сигналами) дает следующее выражение для РВ [6].
 (4.81)
(4.81)
Из формулы (3.64,б) ![]() — временной коэффициент взаимной корреляций между
— временной коэффициент взаимной корреляций между ![]() и
и ![]() , где θ — угол между векторами сигналов
, где θ — угол между векторами сигналов ![]() и s2 (см. рис. 4.6). Для антиподных сигналов, таких как сигналы BPSK, θ = π, поэтому ρ = -1.
и s2 (см. рис. 4.6). Для антиподных сигналов, таких как сигналы BPSK, θ = π, поэтому ρ = -1.
Для ортогональных сигналов, таких как сигналы бинарной FSK (BFSK), θ = π/2, поскольку векторы ![]() и s2 перпендикулярны; следовательно, ρ = 0, что можно доказать с помощью формулы (3.64,а), поэтому выражение (4.81) можно переписать следующим образом.
и s2 перпендикулярны; следовательно, ρ = 0, что можно доказать с помощью формулы (3.64,а), поэтому выражение (4.81) можно переписать следующим образом.
 (4.82)
(4.82)
Здесь Q(x) — дополнительная функция ошибок, подробно описанная в разделах 3.2 и Б.3.2. Зависимость (4.82) для когерентного обнаружения ортогональных сигналов BFSK, показанная на рис. 4.25, аналогична зависимости, полученной для обнаружения ортогональных сигналов с помощью согласованного фильтра (формула (3.71)) и узкополосных ортогональных сигналов (униполярных импульсов) с использованием согласованного фильтра (формула (3.73)). В данной книге мы не рассматриваем амплитудную манипуляцию ООК (on-off keying), но соотношение (4.82 применимо к обнаружению с помощью согласованного фильтра сигналов ООК, так же как и к когерентному обнаружению любых ортогональных сигналов.
Справедливость соотношения (4.82) подтверждает и то, что разность энергий между ортогональными векторами сигналов ![]() и s2 с амплитудой
и s2 с амплитудой ![]() , как показано на рис. 3.10, б, равна квадрату расстояния между концами ортогональных векторов Ed = 2Eb. Подстановка этого результата в формулу (3.63) также дает формулу (4.82). Сравнивая формулы (4.82) и (4.79), видим, что, по сравнению со схемой BPSK, схема BFSK требует на 3 дБ большего отношения E/N0 для обеспечения аналогичной достоверности передачи. Этот результат не должен быть неожиданным, поскольку при данной мощности сигнала квадрат расстояния между ортогональными векторами вдвое (на 3 дБ) больше квадрата расстояния между антиподными векторами.
, как показано на рис. 3.10, б, равна квадрату расстояния между концами ортогональных векторов Ed = 2Eb. Подстановка этого результата в формулу (3.63) также дает формулу (4.82). Сравнивая формулы (4.82) и (4.79), видим, что, по сравнению со схемой BPSK, схема BFSK требует на 3 дБ большего отношения E/N0 для обеспечения аналогичной достоверности передачи. Этот результат не должен быть неожиданным, поскольку при данной мощности сигнала квадрат расстояния между ортогональными векторами вдвое (на 3 дБ) больше квадрата расстояния между антиподными векторами.
4.7.4. Вероятность появления ошибочного бита при некогерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
Рассмотрим бинарное ортогональное множество равновероятных сигналов FSK ![]() , определенное формулой (4.8).
, определенное формулой (4.8).
![]()
Фаза φ неизвестна и предполагается постоянной. Детектор описывается М = 2 каналами, состоящими, как показано на рис. 4.19, из полосовых фильтров и детекторов огибающей. На вход детектора поступает принятый сигнал r(t) = si(t) + n(t), где n(i) — гауссов шум с двусторонней спектральной плотностью мощности No/2. Предположим, что ![]() и
и ![]() достаточно разнесены по частоте, чтобы их перекрытием можно было пренебречь. Вычисление вероятности появления ошибочного бита для равновероятных сигналов
достаточно разнесены по частоте, чтобы их перекрытием можно было пренебречь. Вычисление вероятности появления ошибочного бита для равновероятных сигналов ![]() и
и ![]() начнем, как и в случае узкополосной передачи, с уравнения (3.38).
начнем, как и в случае узкополосной передачи, с уравнения (3.38).
 (4.83)
(4.83)
Для бинарного случая тестовая статистика z(T) определена как ![]() . Предположим, что полоса фильтра Wf равна 1/T, так что огибающая сигнала FSK (приблизительно) сохраняется на выходе фильтра. При отсутствии шума в приемнике значение z(T) равно
. Предположим, что полоса фильтра Wf равна 1/T, так что огибающая сигнала FSK (приблизительно) сохраняется на выходе фильтра. При отсутствии шума в приемнике значение z(T) равно ![]() при передаче s1(t) и —
при передаче s1(t) и —![]() — при передаче s2(t). Вследствие такой симметрии оптимальный порог γ0=0. Плотность вероятности
— при передаче s2(t). Вследствие такой симметрии оптимальный порог γ0=0. Плотность вероятности ![]() подобна плотности вероятности
подобна плотности вероятности ![]() .
.
![]() (4.84)
(4.84)
Таким образом, можем записать
 (4.85)
(4.85)
или
![]() (4.86)
(4.86)
где z1 и z2 обозначают выходы z1(T) и z2(T) детекторов огибающей, показанных на рис.4.19. При передаче тона ![]() , т.е. когда r(t) = s2(t) + n(t), выход z1(T) состоит исключительно из случайной переменной гауссового шума; он не содержит сигнального компонента. Распределение Гаусса в нелинейном детекторе огибающей дает распределение Релея на выходе [6], так что
, т.е. когда r(t) = s2(t) + n(t), выход z1(T) состоит исключительно из случайной переменной гауссового шума; он не содержит сигнального компонента. Распределение Гаусса в нелинейном детекторе огибающей дает распределение Релея на выходе [6], так что
 (4.87)
(4.87)
где ![]() — шум на выходе фильтра. С другой стороны, z2(T) имеет распределение Раиса, поскольку на вход нижнего детектора огибающей подается синусоида плюс шум [6]. Плотность вероятности p(z2s2) записывается как
— шум на выходе фильтра. С другой стороны, z2(T) имеет распределение Раиса, поскольку на вход нижнего детектора огибающей подается синусоида плюс шум [6]. Плотность вероятности p(z2s2) записывается как
 (4.88)
(4.88)
где ![]() и, как и ранее,
и, как и ранее, ![]() — шум на выходе фильтра. Функция 10(х), известная как модифицированная функция Бесселя первого рода нулевого порядка [7], определяется следующим образом.
— шум на выходе фильтра. Функция 10(х), известная как модифицированная функция Бесселя первого рода нулевого порядка [7], определяется следующим образом.
 (4.89)
(4.89)
Ошибка при передаче s2(t) происходит, если выборка огибающей z1(T), полученная из верхнего канала (по которому проходит шум), больше выборки огибающей z2(T), полученной из нижнего канала (по которому проходит сигнал и шум). Таким образом, вероятность этой ошибки можно получить, проинтегрировав ![]() до бесконечности с последующим усреднением результата по всем возможным z2.
до бесконечности с последующим усреднением результата по всем возможным z2.
 (4.91)
(4.91)
Здесь ![]() , внутренний интеграл — условная вероятность ошибки, при фиксированном значении z2, если был передан сигнал s2(1), а внешний интеграл усредняет условную вероятность по всем возможным значениям z2. Данный интеграл можно вычислить аналитически [8], и его значение равно следующему.
, внутренний интеграл — условная вероятность ошибки, при фиксированном значении z2, если был передан сигнал s2(1), а внешний интеграл усредняет условную вероятность по всем возможным значениям z2. Данный интеграл можно вычислить аналитически [8], и его значение равно следующему.
 (4.92)
(4.92)
С помощью формулы (1.19) шум на выходе фильтра можно выразить как
![]() (4.93)
(4.93)
где ![]() a Wf — ширина полосы фильтра. Таким образом, формула (4.92) приобретает следующий вид.
a Wf — ширина полосы фильтра. Таким образом, формула (4.92) приобретает следующий вид.
 (4.94)
(4.94)
Выражение (4.94) показывает, что вероятность ошибки зависит от ширины полосы полосового фильтра и РB уменьшается при снижении Wf. Результат справедлив только при пренебрежении межсимвольной интерференцией (intersymbol interference — ISI). Минимальная разрешенная Wf (т.е. не дающая межсимвольной интерференции) получается из уравнения (3.81) при коэффициенте сглаживания г = 0. Следовательно, Wf= R бит/с =1/T, и выражение (4.94) можно переписать следующим образом.
 (4.95)
(4.95)
 (4.96)
(4.96)
Здесь Еь= (1/2)А2Т — энергия одного бита. Если сравнить вероятность ошибки схем некогерентной и когерентной FSK (см. рис. 4.25), можно заметить, что при равных РB некогерентная FSK требует приблизительно на 1 дБ большего отношения Eb/N0, чем когерентная FSK (для РB < 10-4). При этом некогерентный приемник легче реализуется, поскольку не требуется генерировать когерентные опорные сигналы. По этой причине практически все приемники FSK используют некогерентное обнаружение. В следующем разделе будет показано, что при сравнении когерентной ортогональной схемы FSK с нёкогерентной схемой DPSK имеет место та же разница в 3 дБ, что и при сравнении когерентной ортогональной FSK и когерентной PSK. Как указывалось ранее, в данной книге не рассматривается амплитудная манипуляция ООК (on-off keying). Все же отметим, что вероятность появления ошибочного бита РB, выраженная в формуле (4.96), идентична РB для некогерентного обнаружения сигналов ООК.
4.7.5. Вероятность появления ошибочного бита для бинарной модуляции DPSK
Определим набор сигналов BPSK следующим образом.
 (4.97)
(4.97)
Особенностью схемы DPSK является отсутствие в сигнальном пространстве четко определенных областей решений. В данном случае решение основывается на разности фаз между принятыми сигналами. Таким образом, при передаче сигналов DPSK каждый бит в действительности передается парой двоичных сигналов.
 (4.98)
(4.98)
Здесь ![]() обозначает сигнал
обозначает сигнал ![]() , за которым следует сигнал
, за которым следует сигнал ![]() . Первые Т секунд каждого сигнала — это в действительности последние Т секунд предыдущего. Отметим, что оба сигнала s1(t) и s2(t) могут принимать любую из возможных форм и что
. Первые Т секунд каждого сигнала — это в действительности последние Т секунд предыдущего. Отметим, что оба сигнала s1(t) и s2(t) могут принимать любую из возможных форм и что ![]() и
и ![]() — это антиподные сигналы. Таким образом, корреляцию между
— это антиподные сигналы. Таким образом, корреляцию между ![]() и s2(t) для любой комбинации сигналов можно записать следующим образом.
и s2(t) для любой комбинации сигналов можно записать следующим образом.
 (4.99)
(4.99)
Следовательно, каждую пару сигналов DPSK можно представить как ортогональный сигнал длительностью 2Т секунд. Обнаружение может соответствовать некогерентному обнаружению огибающей с помощью четырех каналов, согласованных с каждым возможным выходом огибающей, как показано на рис. 4.26. Поскольку два детектора огибающей, представляющих каждый символ, обратны друг другу, выборки их огибающих будут совпадать. Значит, мы можем реализовать детектор как один канал для ![]() , согласовывающегося с
, согласовывающегося с ![]() или
или ![]() , и один канал для
, и один канал для ![]() , согласовывающегося с
, согласовывающегося с ![]() или
или ![]() , как показано на рис. 4.26. Следовательно, детектор DPSK сокращается до стандартного двухканального некогерентного детектора. В действительности фильтр может согласовываться с разностным сигналом; так что необходимым является всего один канал. На рис. 4.26 показаны фильтры, которые согласовываются с огибающими сигнала (в течение двух периодов передачи символа). Что это означает, если вспомнить, что DPSK — это схема передачи сигналов с постоянной огибающей? Это означает, что нам требуется реализовать детектор энергии, подобный квадратурному приемнику на рис. 4.18, где каждый сигнал в течение периода
, как показано на рис. 4.26. Следовательно, детектор DPSK сокращается до стандартного двухканального некогерентного детектора. В действительности фильтр может согласовываться с разностным сигналом; так что необходимым является всего один канал. На рис. 4.26 показаны фильтры, которые согласовываются с огибающими сигнала (в течение двух периодов передачи символа). Что это означает, если вспомнить, что DPSK — это схема передачи сигналов с постоянной огибающей? Это означает, что нам требуется реализовать детектор энергии, подобный квадратурному приемнику на рис. 4.18, где каждый сигнал в течение периода ![]() представляется синфазным и квадратурным опорными сигналами.
представляется синфазным и квадратурным опорными сигналами.
синфазный опорный сигнал ![]() квадратурный опорный сигнал
квадратурный опорный сигнал ![]() синфазный опорный сигнал
синфазный опорный сигнал ![]() квадратурный опорный сигнал
квадратурный опорный сигнал ![]()
Поскольку пары сигналов DPSK ортогональны, вероятность ошибки при подобном некогерентном обнаружении дается выражением (4.96). Впрочем, поскольку сигналы DPSK длятся 2Т секунд, энергия сигналов ![]() , определенных в формуле (4.98), равна удвоенной энергии сигнала, определенного в течение одного периода передачи символа.
, определенных в формуле (4.98), равна удвоенной энергии сигнала, определенного в течение одного периода передачи символа.
а)
б)
Рис. 4.26. Обнаружение в схеме DPSK: а) четырехканальное дифференциально-когерентное обнаружение сигналов в бинарной модуляции DPSK; б) эквивалентный двухканальный детектор сигналов в бинарной модуляции DPSK
Таким образом, РВможно записать в следующем виде.
 (4.100)
(4.100)
Зависимость (4.100), изображенная на рис. 4.25, представляет собой дифференциальное когерентное обнаружение сигналов в дифференциальной модуляции PSK, или просто DPSK. Выражение справедливо для оптимального детектора DPSK (рис. 4.17, в). Для детектора, показанного на рис. 4.17, б, вероятность ошибки будет несколько выше приведенной в выражении (4.100) [3]. Если сравнить вероятность ошибки, приведенную в формуле (4.100), с вероятностью ошибки когерентной схемы PSK (см. рис. 4.25), видно, что при равных РB схема DPSK требует приблизительно на 1 дБ большего отношения E^N0, чем схема BPSK (для ![]() ). Систему DPSK реализовать легче, чем систему PSK, поскольку приемник DPSK не требует фазовой синхронизации. По этой причине иногда предпочтительнее использовать менее эффективную схему DPSK, чем более сложную схему PSK.
). Систему DPSK реализовать легче, чем систему PSK, поскольку приемник DPSK не требует фазовой синхронизации. По этой причине иногда предпочтительнее использовать менее эффективную схему DPSK, чем более сложную схему PSK.
4.7.6. Вероятность ошибки для различных модуляций
В табл. 4.1 и на рис. 4.25 приведены аналитические выражения и графики РB для наиболее распространенных схем модуляции, описанных выше. Для РB = 10-4 можно видеть, что разница между лучшей (когерентной PSK) и худшей (некогерентной ортогональной FSK) из рассмотренных схем равна приблизительно 4 дБ. В некоторых случаях 4 дБ — это небольшая цена за простоту реализации, увеличивающуюся от когерентной схемы PSK до некогерентной FSK (рис. 4.25); впрочем, в других случаях ценным является даже выигрыш в 1 дБ. Помимо сложности реализации и вероятности РB существуют и другие факторы, влияющие на выбор модуляции; например, в некоторых случаях (в каналах со случайным затуханием) желательными являются некогерентные системы, поскольку иногда когерентные опорные сигналы затруднительно определять и использовать. В военных и космических приложениях весьма желательны сигналы, которые могут противостоять значительному ухудшению качества, сохраняя возможность обнаружения.
Таблица 4.1. Вероятность ошибки для различных бинарных модуляций
|
Модуляция |
PB |
|
PSK (когерентное обнаружение) |
|
|
DPSK (дифференциальное когерентное обнаружение) |
|
|
Ортогональная FSK (когерентное обнаружение) |
|
|
Ортогональная FSK (некогерентное обнаружение) |
|


Можно принять

Критерии
оптимального обнаружения.
При обнаружении возможны
два неизвестных и взаимоисключающих условия, которые иногда именуются
альтернативными гипотезами: условие Н1 — сигнал (цель) есть; условие Н0 — сигнала (цели) нет.
Приемник на основе анализа
функции х(t) должен вынести решение о наличии или отсутствии сигнала
(цели). Решения обозначим: А1 — сигнал (цель) есть; А0
— сигнала (цели) нет.
Одно из решений правильное, а другое — ошибочное, так что возможны четыре варианта
совмещения решения и условия:
— А1H1
— правильное обнаружение;
— А0H1 — пропуск цели;
—
А1H0 — ложная
тревога;
—
А0H0 — правильное
необнаружение.
Обычно определение априорных
вероятностей наличия и отсутствия
целей р(А1) и р(А2), а также вероятностей совмещения (безусловных вероятностей) р(А1H1), р(А0H1),
р(А1H0), р(А0H0) связано с практическими трудностями, и поэтому при
проектировании, испытании и эксплуатации РЛС используются условные вероятности.
Вероятность со- бытия А1, вычисленная при условии, что
имело место H1, именуется вероятностью правильного обнаружения
D = р(А1/H1). (6)
Аналогично, вероятность пропуска
D0 = р(А0/H1).
(7)
Правильное обнаружение и пропуск образуют полную группу несовместных событий,
так что
D + D0 = 1. (8)
Далее имеем вероятность ложной тревоги (ложного обнаружения)
F = р(А1/H0)
(9) и
вероятность правильного необнаружения
F0
= p(A0H0),
(10)
причем,
как и в (8),
F + F0=1.
(11)
Из сказанного следует, что при обнаружении возможны два вида ошибок: пропуск
цели и ложная тревога. Степень нежелательности этих ошибок различна, что надо
учиты- вать при принятии решения.
Делается это посредством некоторой величины — cтоимости
ошибок. Систему
обнаружения характеризуют средней
стоимостью или средним риском, которая вычисляется по правилу нахождения
математического ожидания:
![]() (12)
(12)
где
г01 — стоимость пропуска, а г10 — стоимость ложной тревоги.
Воспользуемся правилами умножения вероятностей:
 (13)
(13)
где
р(H1) и р(H0) — априорные вероятности
соответственно наличия и отсутствия сигнала.
Подставляя (13) в (12), получаем средний риск в виде
![]() (14).
(14).
Оптимальной обработкой
сигнала (оптимальным приемником) будем считать такую, которая характеризуется
минимумом среднего риска. Данная оценка обработки математической статистике и именуется байесовской оценкой. Она естественна для наблюдателя, который
должен принять большое число решений в одинаковых условиях.
Для использования минимума среднего риска в качестве критерия обнаружения («критерий Байеса») должны быть установлены стоимости ошибок г10 и г01
и известны
априорные вероятности р(H1) и р(H0). Если, например, принять, стоимости ошибок
r01 = r10 = 1,
т.
е. полагать, что пропуск сигнала и ложная тревога одинаково опасны, то средний
риск равен
![]() , (15)
, (15)
т.
е. суммарной вероятности ошибки.
Условие минимума этой суммарной вероятности ошибки называется критерием идеального наблюдателя. Он соответствует критерию
идеального приемника, и широко используется в задачах радиосвязи, где ложное
обнаружение и пропуск одинаково нежелательны.
Представим теперь в формуле (14) вероятность пропуска цели как D0= 1 — D, тогда
![]()
![]() (16) где
(16) где
весовой множитель
![]() (17)
(17)
включает
только стоимости ошибок и априорные вероятности, т, е. не зависит от
принимаемого сигнала.
—
Следствием минимума среднего риска r является максимум разности
D—l0F = max, (18)
что
именуется весовым, критерием.
Если задаться l0 и сравнивать оптимальную и неоптимальные системы,
то
Dопт—l0Fопт ≥ D—l0F, или
Dопт≥ D + l0(Fопт –F).
Таким образом. при F<Fопт должно быть D < Doпт
,
т.е. оптимальная система дает наибольшую вероятность правильного
обнаружения среди всех систем, имеющих вероятность ложной тревоги не больше,
чем у оптимальной.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
Применение статистических критериев при решении задач обнаружения в радиотехнике
Время на прочтение
6 мин
Количество просмотров 27K
Аннотация
В статье рассмотрены основы статистической обработки сигналов и методы их оптимальной обработки* на фоне шума.
Оптимальная обработка
*Под оптимальной обработкой в радиолокации понимают такую операцию над входной реализацией**, приводящей к повышению вероятности правильно обнаружения полезного сигнала, как правило, известной формы, при условии наличия во входной реализации шума в виде случайного процесса с известным или неизвестным законом распределения.
**Процесс наблюдаемый на входе приёмника. Строго говоря, назвать его «Входной сигнал» нельзя, так как в теории связи «Шум» и «Сигнал» — антонимы.
Введение
Основной задачей радиотехники является приём, передача и обработка информации с использованием в качестве переносчика – радиосигнала. Главное требование, предъявляемое к радиотехническим системам – получение своевременной и достоверной информации от источника к потребителю. Однако этому мешает физика принципов работы приёмопередающих устройств и среды распространения сигнала, суть которой заключается во флюктуации физических параметров системы и случайным значением принимаемого сигнала, имеющего шумовую составляющую, также относящуюся к стохастическим процессам.
На текущий момент, самый эффективный способ различения полезных сигналов на фоне шумов и помех является оптимальная обработка, реализуемая, как правило, сравнением принимаемой входной реализации с априорно известной формой полезного сигнала. При этом шумы, которые по своей природе процесс слабокоррелированный, вносят меньший вклад в величину, показывающую степень этого сравнения и называющуюся коэффициентом корреляции. Таким образом, любая задача обнаружения сводится к проверке минимум двух гипотез. В общем случае задача обнаружения состоит из двух гипотез: H_0 – сигнал отсутствует на входе приёмного устройства, H_1 – сигнал присутствует на входе приёмного устройства. Различные алгоритмы обнаружения обеспечивают различную вероятность правильного обнаружения P{d_1/H_1} при различных прочих статистических параметрах. Для сравнения эффективности алгоритмов обнаружения существуют критерии, а так как обрабатываются вероятностные величины, то характер этих критериев статистический. Иными словами критерий можно определить как мерило сравнения.
Статистические критерии обнаружения
Большая часть алгоритмов обнаружения радиолокационных целей включают в себя следующие этапы:
- Прием входной реализации
- Формирование порога на основе априорной или апостериорной информации.
- Оптимальная фильтрация входной реализации
- Принятие решения о наличии сигнала/цели
При этом очередность приёма входной реализации и формирования порога зависит непосредственно от типа алгоритма. Алгоритмы, формирующие порог на основе апостериорной информации о принятой входной реализации называют адаптивными [1]. Критерий выбирается эмпирически исходя из типа задачи. Например: при выборе места работы обычно рассматривают два критерия:
- Максимума отношения заработанных денег к затраченной силе.
- Максимума удовольствия, получаемого от работы.
К сожалению, современные реалии ставят в приоритет такого специалиста, навыки которого позволяли бы как можно быстрее выпустить продукцию и максимизировать прибыль компании. И зачастую второй критерий либо отбрасывается, либо при анализе ситуации ему присваивается низкий приоритет. Показатель, в данном случае, определяющий приоритет критериев, называется его мощностью.
В математической статистике мощность критерия определяется, как вероятность не совершить ошибку второго рода при принятии решения. В нашем случае ошибка второго рода — это не устроится на оптимальную для себя работу, в общем же случае это ложное принятие за истину события соответствующего гипотезе H_0.
Разумеется, универсальных критериев не существует. Так, например, критерий, имеющий наибольшую мощность, в решении одной задачи, в решении другой может оказаться наихудшим по этому показателю.
Критерий минимального среднего риска (критерий Байеса)

Рис.1 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностями ошибок
Пусть A = 1 соответствует наличию сигнала s(t), а A = 0 – его отсутствию. Множество решений d вырождается в два: d_0 →A=1 and d_1→A=0.
При решении задачи бинарного обнаружения задача эквивалентна проверке гипотезы H_1 о том, что А = 1, при альтернативной гипотезе H_0 о том, что А = 0, а функция потерь переходит в квадратную матрицу:
Таким образом, условный риск при A = 0 равен r_0= C_00 P{d_0/H_0 }+ C_01 P{d_1/H_0 }=C_00 (1-P{d_1/H_0 })+ C_01 P{d_1/H_0 }, а при A = 1 равен r_1= C_10 P{d_0/H_1 }+ C_11 P{d_1/H_1}=C_10 (1-P{d_1/H_1} )+C_11 P{d_1/H_1}, где P{d_1/H_1} – вероятность правильного обнаружения, а P{d_1/H_0 } – вероятность ложной тревоги.
Средний риск определяется как r ̅=qr_0+pr_1, где q – априорная вероятность отсутствия сигнала, а p – априорная вероятность присутствия сигнала и определяет средние потери при ложной тревоге и пропуске цели [2]. Например: при использовании такого критерия для выставления порога срабатывания пожарной сигнализации, стоимость риска при ложной тревоге – вызов пожарной службы, а при пропуске – стоимость вещей в сгоревшей квартире или офисе.
На рис.1 проиллюстрированы графики распределения плотности вероятности при наличии и отсутствии сигнала, также выделены зоны, площадь которых численно равна вероятностям ошибок при принятии решения. Ввиду стохастической природы явлений рассматриваемых в данном примере, распределения имеют ненулевую дисперсию. Согласно критерию минимального среднего риска лучшим алгоритмом обнаружения сигнала будет тот, у которого величина r ̅ будет минимальна [2].
Критерий максимума апостериорной вероятности (максимального правдоподобия)
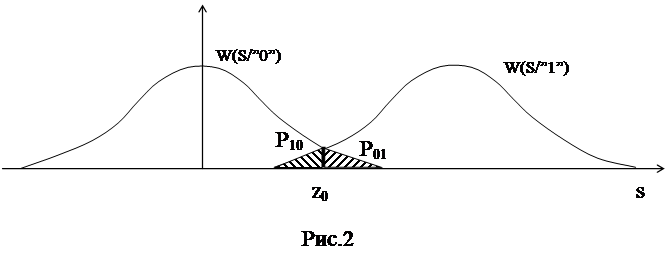
Этот критерий получается из критерия минимального среднего риска при условии, что потери при совершении ошибки обратно пропорциональны вероятности их совершения C_01=1/P{d_0}, C_10=1/P{d_1}. При этом порог оптимального обнаружителя выставляется таким образом, чтобы минимизировать сумму вероятностей ошибок P_ош=P{d_0/H_1 }+P{d_1/H_0 } (см рис.2).
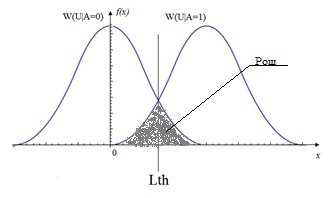
Рис.2 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностью ошибки
Двухпороговый критерий Вальда
В случаях, когда большую роль играет время наблюдения за процессом, например при наличии нескольких каналов и одного обнаружителя или круговом обзоре РЛС, применяют критерий последовательной проверки гипотез Вальда также известный под названием двухпороговый.
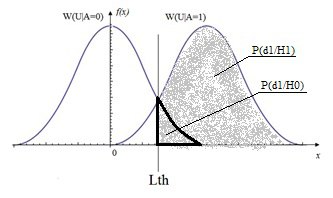
Рис.3 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностью правильного обнаружения и вероятностью ложной тревоги
По этому критерию область определения вероятности делится на три подобласти, разделяемыми двумя порогами, определяемыми вероятностями правильного обнаружения и ложной тревоги (см.рис 3): 
Критерий Вальда является оптимальным в смысле минимизации среднего времени наблюдения по большому количеству экспериментов [4]. Так как наиболее предпочтительным для радиолокации является сокращение длительности процедуры обнаружения, современные реалии ведут к всё более активному использованию этого критерия [5].
Критерий Неймана-Пирсона
Большим минусом критериев Байесовского класса является необходимость априорного знания элементов матрицы потерь. Например: при пропуске вражеского бомбардировщика на союзную территорию стоимость рисков не поддается исчислению.
В критерии Неймана-Пирсона фиксируется время обнаружения. Оптимальным будет алгоритм с максимальной вероятностью правильного обнаружения P{d_1/H_1 }, при условии, что вероятность ложной тревоги P{d_1/H_0 } не превышает заданной величины [6].
В виду того, что критерий Неймана-Пирсона не требует знания априорных вероятностей ситуаций A = 1 и A = 0, в радиолокации его используют одним из основных [5].
Заключение
При разработке обнаружителей очень важно осознанно выбирать критерий оптимальности, ведь, как уже упоминалось ранее, каждый критерий имеет максимальную мощность в какой-либо определенной ситуации и применение иных может привести к нежелательным последствиям.
Список использованных источников:
[1] Bulyakulov R.R. The adaptive threshold device // Processing of the 2014 IEEE North West Russia Section Young Researches in Electrical and Electronic Engineering Conference. P.165.
doi: 10.1109/EIConRusNW.2016.7448237
[2] Бакулев, П.А. Радиолокационные системы. Учебник для ВУЗов / П.А. Бакулев; М.: Радиотехника, 2004. – 46 с.
[3] Юревич, Е.И. Теория автоматического управления / Е.И. Юревич; М.: Энергия, 1969
[4] Богатырев, А.А. Стандартизация статистических методов управления качеством / А. А. Богатырев, Ю. Д. Филиппов; М.: Изд-во стандартов, 1989. – 42 с.
[5] Храменков, А.С. Сопоставительный анализ радиолокационных обнаружителей, основанных на критерии неймана-пирсона и последовательном критерии отношения вероятностей /А.С. Храменков, С.Н. Ярмолик // доклады БГУИР №6(76) Минск, 2013.
[6] Васильев, К.К. Методы обработки сигналов: Учебное пособие / К.К. Васильев; Ульяновск, 2001.
Выводы
теории статистических решений могут
быть успешно применены при обнаружении
сигналов. При бинарном обнаружении на
входе устройства обнаружения либо
присутствует сигнал о наличии объекта
(состояние A1),
либо этот сигнал отсутствует (состояние
A0
). Устройство обнаружения при любом
состоянии на входе может принимать два
решения: либо решение о наличии сигнала
(решение
![]() ),
),
либо решение об отсутствии сигнала
(решение![]() ).
).
Тогда при работе такого устройства
возможны четыре случая:
1.
Сигнал на входе устройства присутствует
(состояние A1),
и устройство обнаружения принимает
решение
![]() о наличии сигнала. Такая ситуация
о наличии сигнала. Такая ситуация
называется правильным обнаружением, и
безусловная вероятность существования
такой ситуации
![]()
где
![]() – условная вероятность правильного
– условная вероятность правильного
обнаружения.
2.
Сигнал на входе устройства отсутствует
(состояние A0),
и устройство обнаружения принимает
решение
![]() об отсутствии сигнала. Такая ситуация
об отсутствии сигнала. Такая ситуация
называется правильным необнаружением,
и безусловная вероятность существования
такой ситуации
![]()
где
![]() – условная вероятность правильного
– условная вероятность правильного
необнаружения.
3.
Сигнал на входе устройства отсутствует
(состояние A0
), но устройство обнаружения принимает
решение
![]() о наличии сигнала (ошибка первого рода).
о наличии сигнала (ошибка первого рода).
Такая ситуация называется ложной
тревогой, и безусловная вероятность
существования такой ситуации
![]() (2.6)
(2.6)
где
![]() – условная вероятность ложной тревоги.
– условная вероятность ложной тревоги.
4.
Сигнал на входе устройства присутствует
(состояние A1),
но устройство обнаружения принимает
решение
![]() об отсутствии сигнала (ошибка второго
об отсутствии сигнала (ошибка второго
рода). Такая ситуация называется пропуском
цели, и безусловная вероятность
существования такой ситуации
![]() (2.7)
(2.7)
где
![]() – условная вероятность пропуска цели.
– условная вероятность пропуска цели.
Нетрудно
убедиться, что
![]() т. е. из четырех условных вероятностей
т. е. из четырех условных вероятностей
независимыми являются только две. Из
предыдущего ясно также, что соотношением
между![]() и
и![]() ,
,![]() и
и![]() можно управлять, изменяя порогl0
можно управлять, изменяя порогl0
в выражении
(3.5). Таким образом, встает задача об
оптимальном выборе значения порога
отношения правдоподобия l0.
2.4. Критерии оптимального обнаружения
В
зависимости от имеющейся априорной
информации о свойствах сигнала и помехи
и от опасности ошибок первого и второго
родов предложены различные критерии
для выбора порога l0.
Если известна априорная вероятность
появления сигнала и ошибкам первого и
второго родов можно приписать определенные
стоимости или штрафы, то можно говорить
о некотором среднем риске r
принятия неправильного решения:
![]()
где
rF
– стоимость риска ложной тревоги;
![]() – стоимость риска пропуска цели. Если
– стоимость риска пропуска цели. Если
учесть равенства (2.6) и (2.7), а также то,
чтоP(A0)=1- P(A1)
, выражение для среднего риска можно
записать в виде
![]()
Поскольку
в соответствии с выражениями (2.2) и (2.3)
вероятности ошибок PF
и
![]() зависят от разбиения области существования
зависят от разбиения области существования
переменной (в нашем случае – области
значений принятого колебанияx(t))
на подобласти, т. е. от выбора порога
l0
, то, минимизируя средний риск
![]() при измененииl0,
при измененииl0,
можно получить оптимальное значение
порога. Этот критерий носит название
критерия минимума среднего риска или
критерия Байеса. Он применим в случае,
когда можно указать стоимости ошибок
rF
и
![]() и известна вероятность появления сигнала
и известна вероятность появления сигнала
(объекта)Р(A1).
В
частном случае, если опасности ложной
тревоги и пропуска цели одинаковы, т. е.
![]() критерий минимума среднего риска
критерий минимума среднего риска
переходит в критерий идеального
наблюдателя или критерий Зигерта-Котельникова:
![]()
Критерий
идеального наблюдателя, как и критерий
Байеса, требует знания вероятности
появления сигнала (объекта). Однако
зачастую при решении задач обнаружения
эта вероятность заранее не известна.
Часто нельзя указать и стоимости ошибок.
В этих случаях применяется критерий
Неймана-Пирсона. Согласно этому критерию,
задаются некоторым малым допустимым
значением вероятности ложной тревоги
PF
и требуют максимизации вероятности
правильного обнаружения PD.
При известной статистике (плотности
распределения вероятностей) помехи по
заданной условной вероятности PF
можно определить пороговое значение
l0
и по нему – условную вероятность
правильного обнаружения.![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Средняя вероятность ошибки в соответствии с формулой (2.4) зависит от вероятности неправильного приема сигналов S1 и S2 . Однако при применении идеального приемника Котельникова канал связи предполагается симметричным, т.е. P(y2/S1) = P(y1/S2). Поэтому формула (2.4) упрощается. В нашем случае Pош = P(y2/S1). Эту формулу мы возьмем за основу при определении вероятности ошибки в приемнике Котельникова.
Допустим, нам известно, что на вход приемника поступает сигнал S1(t). В этом случае, в соответствии с правилом решения приемника Котельникова (4.4), должно выполняться следующее неравенство
[x(t) — S1(t)]2 < [x(t) — S2(t)]2 . (7.1)
Однако, несмотря на поступление сигнала S1(t), при сильной помехе знак неравенства может измениться на противоположный, в результате чего приемник вместо сигнала S1(t) выдает сигнал S2(t), то есть произойдет ошибка. Вероятность искажения сигнала S1(t) можно определить как вероятность изменения знака неравенства (7.1), если подставить туда x(t) = S1(t) + n(t).
После очевидных преобразований получаем
Pош = P(y2/S1) = P{n2(t) > [n(t) + S1(t) — S2(t)]2} =P{0 > 2 n(t) [S1(t) — S2(t)] + [S1(t) — S2(t)]2} =
= P{1/T ![]() 2n(t) [S1(t) — S2(t)]dt + 1/T
2n(t) [S1(t) — S2(t)]dt + 1/T ![]() [S1(t) — S2(t)]2dt < 0}.
[S1(t) — S2(t)]2dt < 0}.
Сокращая на Т, получаем
Pош = P{ ![]() n(t) [S1(t) — S2(t)]dt + 0,5
n(t) [S1(t) — S2(t)]dt + 0,5 ![]() [S1(t) — S2(t)]2dt < 0}.
[S1(t) — S2(t)]2dt < 0}.
Обозначим в этом выражении:
![]() n(t) [S1(t) — S2(t)]dt = m ,
n(t) [S1(t) — S2(t)]dt = m , ![]() [S1(t) — S2(t)]2dt = Еэ (7.2)
[S1(t) — S2(t)]2dt = Еэ (7.2)
С учетом этих обозначений вероятность искажения сигнала S1 будет определятся формулой
Pош = P{m < 1/2× Eэ}. (7.3)
В этой формуле Eэ — энергия разности сигналов S1(t) — S2(t), называемая «эквивалентной энергией» , а m — некоторая случайная величина, зависящая от помехи n(t) и разности сигналов S1(t) — S2(t).
Так как помеха n(t) имеет гауссовское распределение, а величина m есть результат линейной операции над n(t) , то и величина m распределена также по гауссовскому закону
Тогда, в соответствии с (7.3)
 (7.4)
(7.4)
где  — табулированный интеграл вероятностей.
— табулированный интеграл вероятностей.
Можно доказать,что при флюктуационной помехе на входе приемника со спектральной плотностью помехи N0 дисперсия величины m определяется формулой s2m = N0Eэ /2.
Подставляя это значение s2m в (7.4) получим окончательно  (7.5)
(7.5)
Таким образом, в приемнике Котельникова вероятность ошибки полностью определяется эквивалентной энергией сигналов и спектральной плотностью помехи и от полосы пропускания приемника не зависит. На практике обычно на входе приемника все-таки ставят полосовой фильтр, так как в канале связи, кроме флюктуационных помех, часто встречаются также другие помехи (от соседних каналов, импульсные и др.)
Формула (7.5) является достаточно общей. Для конкретных видов модуляции в канале связи эту формулу видоизменяют, для чего вычисляют соответствующее значение Eэ . При этом для различных видов модуляции Eэ определяют через энергию одного из сигналов, а в окончательную формулу вводят величину
h20 = E1/N0 . (7.6)
Следовательно, в приемнике Котельникова, который также называется когерентным (в приемнике известна фаза принимаемого сигнала) вероятность ошибки зависит не от отношения мощности сигнала к мощности помехи, а от отношения энергии сигнала к спектральной плотности помехи. Это позволяет, не меняя мощности сигнала, увеличить его энергию за счет увеличения его длительности, что дает дополнительные возможности в построении помехоустойчивых систем связи.
Вероятности
ошибок ![]() зависят от отношения сигнал/шум q, а также
зависят от отношения сигнал/шум q, а также
от величины порога z0. Для равновероятного источника порог
выставляется симметрично, таким образом, чтобы добиться равных вероятностей
перепутывания ![]() . В таком случае вероятность
. В таком случае вероятность
ошибки равна просто вероятности перепутывания символов ![]() .
.
В
системе с амплитудной модуляцией вероятность ошибки равна
![]()
Данная
величина ошибки достигается для равновероятного источника при оптимальной
величине порога z0=Э/2.
 |
При
моделировании системы передачи информации производится экспериментальное
определение вероятности ошибки. По классическому определению вероятностью
события А называется отношение количество экспериментов, в которых событие А
произошло, к общему количеству экспериментов
В
нашем случае отношение ошибочно переданных символов к общему количеству принятых
символов.
При
конечном количестве экспериментов N<¥ мы имеем дело с
оценкой вероятности. При этом оцененная величина вероятности ошибки сама
является случайной величиной. Для уменьшения ошибки измерения необходимо
увеличивать объём эксперимента. Количество испытаний зависит от порядка
вероятности, которую необходимо измерить, и от допустимой величины погрешности:

где
![]() — допустимая погрешность, P –оцениваемая
— допустимая погрешность, P –оцениваемая
вероятность. Очевидно, что чем меньшего порядка вероятность мы хотим измерить,
и с чем большей точностью, тем больше необходимый объём эксперимента.
Описание пакета «Математика», и используемых
подпрограмм
Пакет «Математика» является мощным комплексом
для проведения инженерных и научных вычислений. Программирование в
«Математике» осуществляется на Си – подобном языке. Всё поле
программы поделено на ячейки, каждая из которых ограничена скобкой справа.
Запуск ячейки на выполнение производится нажатием клавиш Shift+Enter. Основными
объектами на рабочем поле являются а) текст программы б) результат вычислений в) графики, рисунки, диаграммы и пр.
Система передачи информации смоделирована с помощью набора
подпрограмм, каждая из которых реализует то или иное преобразование сигнала:
1. datasource[ ]
– генератор бинарного равновероятного сообщения длиной 60 бит, длительность
одной информационной посылки 1мсек;
2. modulatorAM[u,f]
– генератор амплитудно – манипулированного сигнала амплитудой 1 вольт, u
– модулирующее сообщение, f – несущая частота, может принимать значения
от 1 до 40 кГц.
3. noise[s,q]
– канал передачи, осуществляет зашумление сигнала s аддитивным
гауссовским шумом, с отношением сигнал/шум равным q на выходе канала;
4. optimfilter[s,f]
–блок оптимальной фильтрации, реализует оптимальный фильтр, согласованный с
сигналом s по форме, и настроенный на частоту f;
5. detector[s]
– амплитудный детектор сигнала s;
6. threshold[s,z]
– пороговое устройство, сравнивает сигнал s с порогом z;
7. signalview[s,t1,t2]
– оператор просмотра сигнала s на промежутке времени от момента t1
до момента t2 миллисекунд;
8. dataview[u,n1,n2] – оператор просмотра бинарного сообщения u от бита n1 до бита n2.
Любая строка в пакете «Математика» должна
заканчиваться точкой с запятой, в противном случае на экран выводится результат
вычисления.
Домашнее задание:
1. определить
необходимый объём эксперимента для измерения вероятности ошибки в пределах 0.1
до 0.9 с погрешностью не более 5%.
2. определить
оптимальную величину порога для равновероятного источника
Лабораторное задание
1. Запустить
программу «Математика» и реализовать когерентную СПИ с помощью
имеющихся подпрограмм.
2. Пронаблюдать и
зарисовать сигнал во всех точках системы передачи информации: а) на выходе источника сообщения б) на выходе модулятора или
на выходе канала в) после согласованного
фильтра при отношении сигнал/шум q=100.
3. Измерить
зависимость вероятности ошибки от величины отношения сигнал/шум при а) оптимальном пороге б) пороге больше оптимального в) пороге ниже оптимального
4. Исследовать
величину ошибки при оптимальном пороге и частотной расстройке согласованного
фильтра.
5. Выполнить пункты
1-5 для некогерентной системы
Контрольные вопросы:
1. Структура и
принцип работы системы передачи информации с амплитудной модуляцией
2. Критерии выбора
оптимального порога z0
3. Основное отличие
когерентной системы передачи информации от некогерентной.
4. От чего зависит вероятность
ошибки в системе, каким образом можно её уменьшить.
5. От чего зависит
точность измерения случайных величин при моделировании СПИ.
6. В каких случаях
возникает необходимость в применении некогерентной системы обработки сигнала.