При приеме сигналов
от пяти или большего количества спутников
определение положения аппаратуры
потребителя может обеспечиваться со
значительной избыточностью, что допускает
обнаружение недопустимых сигналов и
использование данных от спутников с
лучшим расположением.
Однако
некоторые источники ошибок, возникающих
при работе GPS, являются трудно устранимыми.
Задержки
распространения сигнала в ионосфере и
тропосфере.
Описанный выше алгоритм предполагает,
что сигнал распространяется с непрерывной
скоростью, которая равна скорости света.
Однако в реальности скорость света
является константой только в вакууме.
Когда сигнал проходит через ионосферу
(слой заряженных частиц на высоте
130 – 290
км) и тропосферу (от
8 до 13 км от поверхности Земли),
его скорость распространения уменьшается,
что приводит к ошибкам в измерении
дальности. В современных GPS приёмниках
используют различные алгоритмы (модели)
для минимизации влияния этих задержек.
Однако, используемые
в настоящее время модели могут устранить
только половину из возможной 70 нс
задержки, что приводит к значительным
(до 10 м) ошибкам в определении
местоположения приемника.
Ошибки спутниковых
часов,
неисправленные сегментом управления,
могут приводить к ошибкам положения
приемника порядка одного метра.
Ошибки в
эфемеридных данных
обычно
незначительны и тщательно отслеживаются
со станций слежения, однако также могут
приводить ошибкам в положении аппаратуры
потребителя порядка 1 м.
Многолучевая
интерференция
также вносит ошибки в определение
местоположения с помощью GPS. Это
происходит, когда сигнал отражается от
объектов, расположенных на земной
поверхности, что создаёт заметную
интерференцию с сигналами приходящими
непосредственно со спутников. Специальная
техника обработки сигнала и продуманная
конструкция антенн позволяет свести к
минимуму этот источник ошибок. Однако
при работе в городских условиях ошибки,
вносимые многолучевой интерференцией,
могут осложнить производство работ.
Оценочное снижение точности в положении
приемника из-за этого явления – порядка
0,5 м.
До 1
мая 2000 года министерство обороны США
использовало искусственное
снижение точности
спутникового сигнала для гражданских
и неавторизированных пользователей –
избирательный доступ (Selective Availability или
S/A). Это приводило к тому, что точность
полученных
координат с
помощью C/A-кода
(30 метров) преднамеренно
снижалась до 100 метров. Однако по решению
президента США «Избирательный Доступ»
был отключен. Кроме того, S/A можно
исключить, применяя технику дифференциальной
коррекции.
Шум и систематические
ошибки смещения, объединяясь, приводят
к типичным ошибкам расстояния около
пятнадцати метров для каждого из
спутников.
Геометрический
фактор –
геометрическое понижение точности GDOP
(Geometric Dilution of Precision)
Ошибки GPS изменяются
в зависимости от взаимного расположения
спутников, используемых в навигационном
решении, и приемника. Объем фигуры,
описанной единичными векторами от
приемника до спутников, используемых
в навигационном решении, обратно
пропорционален параметру GDOP.
Плохой GDOP (большое
значение) – углы от приемника до множества
используемых спутников одинаковы (рис.
17).
|
|
|
|
Рис.
а б |


GDOP
вычисляется из геометрических связей
между положением приемника и положениями
спутников, которые приемник использует
для навигации, с использованием параметров
из процесса навигационного решения.
Ошибки дальностей до спутников умножаются
на соответствующий коэффициент GDOP для
оценки положения или ошибки времени.
Соседние файлы в папке геодезия
- #
- #
- #
- #
- #
- #
- #
- #
- #

Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
Sources of User Equivalent Range Errors (UERE)
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
 C/A C/A
|
±6.7 |
| P(Y)
|
±6.0 |


Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value, 

The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,

PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).

The standard deviation of the error in estimated receiver position

The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width, 
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of 
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Special Relativity (SR) and General Relativity (GR) are two separate and distinct theories under the title of the Theory of Relativity. SR and GR make different (opposite) predictions when it comes to the clocks on-board GPS satellites. Note the opposite signs (plus and minus) below due to the different effects.
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
A number of sources of error exist due to relativistic effects[13] that would render the system useless if uncorrected. Three relativistic effects are time dilation, gravitational frequency shift, and eccentricity effects. Examples include the relativistic time slowing due to the speed of the satellite of about 1 part in 1010, the gravitational time dilation that makes a satellite run about 5 parts in 1010 faster than an Earth-based clock, and the Sagnac effect due to rotation relative to receivers on Earth. These topics are examined below, one at a time.
Special Relativity (SR)[edit]
SR predicts that clocks slow down as velocity increases. That is the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary ground clocks by a factor of 
General Relativity (GR)[edit]
GR has the opposite effect. GR predicts that clocks speed up as they get further away from a massive object (the Earth in this case). The effect of gravitational frequency shift on the GPS due to general relativity is that a clock closer to a massive object will be slower than a clock farther away. Applied to the GPS, the receivers are much closer to Earth than the satellites, causing the GPS clocks in the satellites to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development it was believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
Combined SR and GR[edit]
When combining SR and GR, the discrepancy is about +38 microseconds per day. This is a difference of 4.465 parts in 1010.[14] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[15] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
SR and GR combined
| Theory | Value | Notes |
|---|---|---|
| SR (Special Relativity) | -7.2 μs/day | Clocks slowed in Satellites due to Velocity |
| GR (General Relativity) | +45.8 μs/day | Clocks sped up in Satellites due to lower Gravity |
| Total (Combined) | +38.6 μs/day | GR is larger effect than SR |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[16] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[17] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[18] The conclusion is that the GPS satellites must compensate for GR, the physics of black holes and extreme gravity.
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to special relativity (velocity) and general relativity (gravity) and add them together.
Special Relativity (SR)[edit]
The amount due to velocity will be determined using the Lorentz transformation. This will be:

For small values of v/c, by using binomial expansion this approximates to:

The GPS satellites move at 3874 m/s relative to Earth’s center.[16] We thus determine:

This difference below 1 of 8.349×10−11 represents the fraction by which the satellites’ clocks move slower than Earth’s. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks lose 7214 nanoseconds a day due to SR effects.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[19] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
General Relativity (GR)[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:

For small values of M/r, by using binomial expansion this approximates to:

We are again only interested in the fraction below 1, and in the difference between Earth and the satellites. To determine this difference we take:

Earth has a radius of 6,357 km (at the poles) making Rearth = 6,357,000 m and the satellites have an altitude of 20,184 km[16] making their orbit radius Rgps = 26,541,000 m. Substituting these in the above equation, with Mearth = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the satellites’ clocks move faster than Earth’s. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks gain 45850 nanoseconds a day due to GR effects.
Combined SR and GR[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both the SR and GR effects of relativity.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system, a system in which simultaneity is not uniquely defined. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[20]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[21] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[22] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[23] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[24] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[25]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[26] such as defrosters, or car window tinting films[27] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[28][29] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[30]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[31] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[32] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[33] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[34] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Webb (2004), p. 32.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
Sources of User Equivalent Range Errors (UERE)
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
| C/A
|
±6.7 |
| P(Y)
|
±6.0 |
Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
The standard deviation of the error in estimated receiver position
The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Special Relativity (SR) and General Relativity (GR) are two separate and distinct theories under the title of the Theory of Relativity. SR and GR make different (opposite) predictions when it comes to the clocks on-board GPS satellites. Note the opposite signs (plus and minus) below due to the different effects.
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
A number of sources of error exist due to relativistic effects[13] that would render the system useless if uncorrected. Three relativistic effects are time dilation, gravitational frequency shift, and eccentricity effects. Examples include the relativistic time slowing due to the speed of the satellite of about 1 part in 1010, the gravitational time dilation that makes a satellite run about 5 parts in 1010 faster than an Earth-based clock, and the Sagnac effect due to rotation relative to receivers on Earth. These topics are examined below, one at a time.
Special Relativity (SR)[edit]
SR predicts that clocks slow down as velocity increases. That is the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary ground clocks by a factor of
General Relativity (GR)[edit]
GR has the opposite effect. GR predicts that clocks speed up as they get further away from a massive object (the Earth in this case). The effect of gravitational frequency shift on the GPS due to general relativity is that a clock closer to a massive object will be slower than a clock farther away. Applied to the GPS, the receivers are much closer to Earth than the satellites, causing the GPS clocks in the satellites to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development it was believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
Combined SR and GR[edit]
When combining SR and GR, the discrepancy is about +38 microseconds per day. This is a difference of 4.465 parts in 1010.[14] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[15] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
SR and GR combined
| Theory | Value | Notes |
|---|---|---|
| SR (Special Relativity) | -7.2 μs/day | Clocks slowed in Satellites due to Velocity |
| GR (General Relativity) | +45.8 μs/day | Clocks sped up in Satellites due to lower Gravity |
| Total (Combined) | +38.6 μs/day | GR is larger effect than SR |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[16] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[17] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[18] The conclusion is that the GPS satellites must compensate for GR, the physics of black holes and extreme gravity.
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to special relativity (velocity) and general relativity (gravity) and add them together.
Special Relativity (SR)[edit]
The amount due to velocity will be determined using the Lorentz transformation. This will be:
For small values of v/c, by using binomial expansion this approximates to:
The GPS satellites move at 3874 m/s relative to Earth’s center.[16] We thus determine:
This difference below 1 of 8.349×10−11 represents the fraction by which the satellites’ clocks move slower than Earth’s. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks lose 7214 nanoseconds a day due to SR effects.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[19] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
General Relativity (GR)[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:
For small values of M/r, by using binomial expansion this approximates to:
We are again only interested in the fraction below 1, and in the difference between Earth and the satellites. To determine this difference we take:
Earth has a radius of 6,357 km (at the poles) making Rearth = 6,357,000 m and the satellites have an altitude of 20,184 km[16] making their orbit radius Rgps = 26,541,000 m. Substituting these in the above equation, with Mearth = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
This represents the fraction by which the satellites’ clocks move faster than Earth’s. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks gain 45850 nanoseconds a day due to GR effects.
Combined SR and GR[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both the SR and GR effects of relativity.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system, a system in which simultaneity is not uniquely defined. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[20]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[21] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[22] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[23] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[24] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[25]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[26] such as defrosters, or car window tinting films[27] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[28][29] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[30]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[31] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[32] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[33] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[34] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Webb (2004), p. 32.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
Художественная концепция спутника GPS Block II-F на орбите
В анализ ошибок для спутниковая система навигации важно для понимания того, как работает GPS, и для того, чтобы знать, какой величины ошибок следует ожидать. GPS вносит поправки на ошибки часов приемника и другие эффекты, но остаются остаточные ошибки, которые не исправляются. Положение приемника GPS вычисляется на основе данных, полученных со спутников. Ошибки зависят от геометрического снижения точности и источников, перечисленных в таблице ниже.
Обзор
|
|
В этом разделе фактическая точность оспаривается. Соответствующее обсуждение можно найти на Обсуждение: Анализ ошибок для глобальной системы позиционирования. Пожалуйста, помогите убедиться, что оспариваемые утверждения надежный источник. (Июнь 2016) (Узнайте, как и когда удалить этот шаблон сообщения) |
Источники ошибок эквивалентного диапазона пользователя (UERE)
| Источник | Эффект (м) |
|---|---|
| Прибытие сигнала C / A | ±3 |
| Прибытие сигнала P (Y) | ±0.3 |
| Ионосферные эффекты | ±5 |
| Ошибки эфемерид | ±2.5 |
| Ошибки спутниковых часов | ±2 |
| Многолучевое искажение | ±1 |
| Тропосферные эффекты | ±0.5 |
| C / A |
±6.7 |
| P (Y) |
±6.0 |
Диаграмма геометрических ошибок, показывающая типичное соотношение отображаемого положения приемника, пересечения поверхностей сфер и истинного положения приемника в терминах ошибок псевдодальности, PDOP и числовых ошибок
Ошибки эквивалентного диапазона пользователя (UERE) показаны в таблице. Также есть числовая ошибка с оценочной стоимостью,
Термин «ошибка эквивалентного диапазона пользователя» (UERE) относится к ошибке компонента на расстоянии от приемника до спутника. Эти ошибки UERE представлены как ошибки ±, что означает, что они являются несмещенными или нулевыми средними ошибками. Поэтому эти ошибки UERE используются при вычислении стандартных отклонений. Стандартное отклонение ошибки положения приемника,
PDOP вычисляется как функция положения приемника и спутника. Подробное описание того, как рассчитать PDOP, дано в разделе Геометрическое снижение точности вычислений (GDOP).
Стандартное отклонение ошибки в предполагаемом положении приемника
Диаграмма ошибок слева показывает взаимосвязь указанного положения приемника, истинного положения приемника и пересечения четырех сферических поверхностей.
Измерение времени прихода сигнала
Положение, вычисленное приемником GPS, требует текущего времени, положения спутника и измеренной задержки принятого сигнала. Точность определения местоположения в первую очередь зависит от местоположения спутника и задержки сигнала.
Чтобы измерить задержку, приемник сравнивает битовую последовательность, полученную от спутника, с версией, созданной внутри. Сравнивая нарастающий и задний фронты битовых переходов, современная электроника может измерять смещение сигнала с точностью до одного процента от ширины битового импульса,
Этот компонент точности позиционирования можно улучшить в 10 раз, используя сигнал P (Y) с более высокой чиповой скоростью. Предполагая тот же один процент точности ширины битового импульса, высокочастотный сигнал P (Y) дает точность
Атмосферные эффекты
Несоответствие атмосферных условий влияет на скорость сигналов GPS, когда они проходят через Атмосфера Земли, особенно ионосфера. Исправление этих ошибок является серьезной проблемой для повышения точности определения местоположения GPS. Эти эффекты наименьшие, когда спутник находится прямо над головой, и усиливаются для спутников, расположенных ближе к горизонт так как путь через атмосферу длиннее (см. масса воздуха ). Как только приблизительное местоположение приемника известно, можно использовать математическую модель для оценки и компенсации этих ошибок.
Ионосферная задержка СВЧ-сигнала зависит от его частоты. Он возникает из ионизированной атмосферы (см. Общее электронное содержание ). Это явление известно как разброс и может быть рассчитан на основе измерений задержек для двух или более полос частот, что позволяет оценить задержки на других частотах.[1] Некоторые военные и дорогие гражданские приемники исследовательского класса рассчитывают атмосферную дисперсию по различным задержкам на частотах L1 и L2 и применяют более точную поправку. Это можно сделать в гражданских приемниках без расшифровки сигнала P (Y), передаваемого по L2, путем отслеживания несущая волна вместо модулированный код. Чтобы облегчить это на более дешевых приемниках, новый гражданский кодовый сигнал на L2, названный L2C, был добавлен к спутникам Block IIR-M, которые были впервые запущены в 2005 году. Он позволяет прямое сравнение сигналов L1 и L2 с использованием кодированных сигнал вместо несущей.
Воздействие ионосферы обычно изменяется медленно и может быть усреднено по времени. Эти значения для любой конкретной географической области можно легко вычислить, сравнив положение, измеренное с помощью GPS, с известным местом съемки. Эта поправка также действительна для других приемников в том же месте. Некоторые системы отправляют эту информацию по радио или другим каналам, чтобы приемники, работающие только на L1, могли вносить ионосферные поправки. Ионосферные данные передаются через спутник в Спутниковые системы дополнения (SBAS) такие как Система увеличения площади (WAAS) (доступно в Северной Америке и на Гавайях), EGNOS (Европа и Азия), Многофункциональная спутниковая система дополнения (MSAS) (Япония) и GPS-навигация с гео-дополнениями (GAGAN) (Индия), который передает его на частоте GPS с использованием специальной псевдослучайной шумовой последовательности (PRN), поэтому требуются только один приемник и антенна.
Влажность также вызывает переменную задержку, приводящую к ошибкам, аналогичным ионосферной задержке, но возникающим в тропосфера. Этот эффект более локализован, чем ионосферные эффекты, изменяется быстрее и не зависит от частоты. Эти особенности делают точное измерение и компенсацию ошибок влажности более трудными, чем ионосферные эффекты.[2]
В Атмосферное давление может также изменить задержку приема сигналов из-за присутствия в тропосфере сухих газов (78% N2, 21% O2, 0,9% Ar …). Его действие меняется в зависимости от местной температуры и атмосферного давления вполне предсказуемым образом с использованием законов идеальных газов.[3]
Эффекты многолучевого распространения
На сигналы GPS также могут влиять многолучевость проблемы, при которых радиосигналы отражаются от окружающей местности; здания, стены каньона, твердый грунт и т. д. Эти задержанные сигналы вызывают ошибки измерения, которые различны для каждого типа сигнала GPS из-за его зависимости от длины волны.[4]
Для уменьшения ошибок, связанных с многолучевым распространением, были разработаны различные методы, в первую очередь узкий интервал между корреляторами. Для многолучевого распространения с большой задержкой приемник сам может распознать встречный сигнал и отбросить его. Для решения проблемы многолучевого распространения с более короткой задержкой от сигнала, отражающегося от земли, специальные антенны (например, дроссельная заслонка антенны ) может использоваться для уменьшения мощности сигнала, принимаемого антенной. Отражения с короткой задержкой труднее отфильтровать, потому что они мешают истинному сигналу, вызывая эффекты, почти неотличимые от обычных колебаний атмосферной задержки.
Эффекты многолучевого распространения гораздо менее серьезны в движущихся транспортных средствах. Когда антенна GPS движется, ложные решения с использованием отраженных сигналов быстро не сходятся, и только прямые сигналы приводят к стабильным решениям.
Эфемериды и ошибки часов
В то время как эфемериды данные передаются каждые 30 секунд, сама информация может быть старше двух часов. Изменчивость давления солнечной радиации[5] косвенно влияет на точность GPS из-за влияния на ошибки эфемерид. Если пост время сначала исправить (TTFF), можно загрузить действительные эфемериды в приемник, и в дополнение к установке времени, определение местоположения может быть получено менее чем за десять секунд. Такие эфемеридные данные можно разместить в Интернете, чтобы их можно было загрузить в мобильные устройства GPS.[6] Смотрите также Вспомогательный GPS.
Атомные часы спутников испытывают шум и часы дрейф ошибки. В навигационном сообщении содержатся исправления этих ошибок и оценки точности атомных часов. Однако они основаны на наблюдениях и могут не указывать на текущее состояние часов.
Эти проблемы, как правило, очень малы, но могут составлять несколько метров (десятков футов) неточности.[7]
Для очень точного позиционирования (например, в геодезия ) эти эффекты могут быть устранены дифференциальный GPS: одновременное использование двух и более приемников на нескольких точки обследования. В 1990-е годы, когда приемники были довольно дорогими, некоторые методы квазидифференциальный GPS были разработаны, используя только один приемник, но повторное заселение точек измерения. В Венском техническом университете метод получил название qGPS и было разработано программное обеспечение для постобработки.[нужна цитата ]
Геометрическое снижение точности вычислений (GDOP)
Расчет геометрического снижения точности
Понятие геометрического снижения точности было введено в разделе, источники ошибок и анализ. Были предоставлены расчеты, чтобы показать, как использовался PDOP и как он влиял на стандартное отклонение ошибки местоположения приемника.
Когда видимые спутники GPS расположены близко друг к другу в небе (т. Е. С небольшим угловым разделением), значения DOP высокие; когда они далеко друг от друга, значения DOP низкие. По идее, спутники, которые расположены близко друг к другу, не могут предоставить столько информации, как спутники, которые находятся на большом расстоянии друг от друга. Низкие значения DOP представляют лучшую точность позиционирования GPS из-за более широкого углового разнесения между спутниками, используемыми для расчета положения приемника GPS. HDOP, VDOP, PDOP и TDOP — это соответственно по горизонтали, вертикали, позиции (3-D) и временного снижения точности.
Рисунок 3.1 Снижение точности данных Navstar GPS от береговой охраны США дает графическое представление о том, как геометрия влияет на точность.[8]
Теперь мы беремся за задачу, как вычислить снижение точности. В качестве первого шага в вычислении DOP рассмотрим единичный вектор от приемника к спутнику i с компонентами 




куда 




Первые три элемента каждой строки А являются компонентами единичного вектора от приемника до указанного спутника. Элементами в четвертом столбце являются c, где c обозначает скорость света. Сформулируйте матрицу, Q, так как

Это вычисление производится в соответствии с главой 11 Глобальной системы позиционирования Паркинсона и Спилкера, где весовая матрица п, был установлен в единичную матрицу. Элементы Q матрицы обозначены как:[9]

Греческая буква 

в соответствии с «Раздел 1.4.9 ПРИНЦИПОВ РАЗМЕЩЕНИЯ СПУТНИКОВ».
Горизонтальное снижение точности, 

Вывод уравнений для вычисления геометрического снижения точности
Уравнения для вычисления геометрического снижения точности членов были описаны в предыдущем разделе. В этом разделе описывается вывод этих уравнений. Используемый здесь метод аналогичен используемому в «Глобальная система позиционирования (превью) Паркинсона и Спайкера»
Рассмотрим вектор ошибки положения, 






куда 




.
Переставляем обе стороны:
.
После умножения матриц с обеих сторон уравнения (2) на соответствующие матрицы в уравнении (3) получаем
.
Взяв ожидаемое значение с обеих сторон и взяв неслучайные матрицы за пределы оператора ожидания, E, получаем:

Предполагая, что ошибки псевдодальности некоррелированы и имеют одинаковую дисперсию, ковариационная матрица с правой стороны может быть выражена как скаляр, умноженный на единичную матрицу. Таким образом

поскольку

Примечание: 

Замена на 

Из уравнения (7) следует, что отклонения указанного положения приемника и времени равны
и

Остальные условия дисперсии ошибки положения и времени следуют прямо.
Выборочная доступность
В GPS есть (в настоящее время отключена) функция под названием Выборочная доступность (SA), который добавляет к общедоступным навигационным сигналам преднамеренные изменяющиеся во времени погрешности до 100 метров (328 футов). Это было сделано с целью запретить противнику использовать гражданские приемники GPS для наведения высокоточного оружия.
Ошибки SA на самом деле являются псевдослучайными, генерируются криптографическим алгоритмом из классифицированного семя ключ доступный только авторизованным пользователям (военные США, их союзники и некоторые другие пользователи, в основном правительственные) со специальным военным приемником GPS. Простого владения приемником недостаточно; ему по-прежнему нужен строго контролируемый ежедневный ключ.
До отключения 2 мая 2000 года типичные ошибки SA составляли около 50 м (164 фута) по горизонтали и около 100 м (328 футов) по вертикали.[10] Поскольку SA влияет на каждый приемник GPS в данной области почти одинаково, фиксированная станция с точно известным местоположением может измерять значения ошибок SA и передавать их местным приемникам GPS, чтобы они могли исправить свои определения местоположения. Это называется дифференциальным GPS или DGPS. DGPS также исправляет несколько других важных источников ошибок GPS, в частности ионосферную задержку, поэтому он продолжает широко использоваться, даже если SA отключен. Неэффективность SA перед лицом широко доступной DGPS была распространенным аргументом в пользу отключения SA, и в конечном итоге это было сделано по приказу президента. Клинтон в 2000 г.[11]
Услуги DGPS широко доступны как из коммерческих, так и из государственных источников. К последним относятся WAAS и Береговая охрана США сеть LF морские навигационные маяки. Точность поправок зависит от расстояния между пользователем и приемником DGPS. По мере увеличения расстояния ошибки на двух участках также не будут коррелировать, что приведет к менее точным дифференциальным поправкам.
В 1990–91 гг. Война в Персидском заливе из-за нехватки военных устройств GPS многие военнослужащие и их семьи покупали легкодоступные гражданские устройства. Выборочная доступность значительно затруднила использование этих GPS военными США на поле боя, поэтому военные приняли решение отключить его на время войны.
В 1990-е гг. FAA начал оказывать давление на военных, чтобы они отключили СА навсегда. Это позволило бы FAA ежегодно экономить миллионы долларов на обслуживании собственных радионавигация системы. Сумма добавленной ошибки была «установлена на ноль».[12] в полночь 1 мая 2000 г. после заявления президента США Билл Клинтон, позволяя пользователям получать доступ к безошибочному сигналу L1. Согласно директиве, вызванная ошибка SA была изменена, чтобы не добавлять ошибок к общедоступным сигналам (код C / A). Указ Клинтона требовал, чтобы SA была обнулена к 2006 году; это произошло в 2000 году, когда американские военные разработали новую систему, которая дает возможность отказывать в использовании GPS (и другим навигационным службам) враждебным силам в конкретной зоне кризиса, не затрагивая остальной мир или свои собственные военные системы.[12]
19 сентября 2007 г. Министерство обороны США объявил, что будущее GPS III спутники не смогут реализовать SA,[13] в конечном итоге сделав политику постоянной.[14]
Антиспуфинг
Остается еще одно ограничение по GPS — антиспуфинг. Это шифрует P-код так что он не может быть имитирован передатчиком, отправляющим ложную информацию. Немногие гражданские приемники когда-либо использовали P-код, и точность, достигаемая с помощью общедоступного кода C / A, была намного лучше, чем ожидалось изначально (особенно с DGPS ), настолько сильно, что политика защиты от подделки имеет относительно небольшое влияние на большинство гражданских пользователей. Отключение функции защиты от подделки в первую очередь принесет пользу геодезистам и некоторым ученым, которым необходимы чрезвычайно точные положения для таких экспериментов, как отслеживание движения тектонических плит.
Относительность
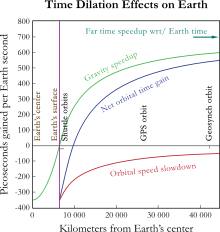
Спутниковые часы замедляются из-за своей орбитальной скорости, но ускоряются из-за расстояния от гравитационного колодца Земли.
Существует ряд источников ошибок из-за релятивистский последствия[15] это сделало бы систему бесполезной, если бы ее не исправляли. Три релятивистских эффекта — это замедление времени, гравитационный сдвиг частоты и эффекты эксцентриситета. Примеры включают релятивистское время замедление из-за скорости спутника около 1 части из 1010, гравитационное замедление времени, которое заставляет спутник лететь примерно на 5 частей из 1010 Быстрее чем часы на Земле, и Эффект Саньяка из-за вращения относительно приемников на Земле. Эти темы рассматриваются ниже по очереди.
Специальная и общая теория относительности
Согласно теории относительности, из-за их постоянного движения и высоты относительно Земли в центре, невращающиеся приблизительно инерционные система отсчета на часы спутников влияет их скорость. Специальная теория относительности предсказывает, что частота атомных часов, движущихся с орбитальной скоростью GPS, будет идти медленнее, чем стационарные наземные часы, в раз 
Влияние сдвига частоты гравитации на GPS из-за общая теория относительности в том, что часы ближе к массивному объекту будут медленнее, чем часы дальше. Применительно к GPS приемники расположены намного ближе к Земле, чем спутники, в результате чего часы GPS работают быстрее в 5 × 10 раз.−10, или около 45,9 мкс / день. Этот сдвиг частоты гравитации заметен.
При объединении замедления времени и гравитационного сдвига частоты расхождение составляет около 38 микросекунд в сутки, то есть разница в 4,465 частей на 1010.[16] Без исправления в позиции будут накапливаться ошибки примерно 11,4 км / день.[17] Эта начальная ошибка псевдодальности исправляется в процессе решения уравнения навигации. Вдобавок эллиптические, а не идеально круглые орбиты спутников вызывают изменение во времени эффектов замедления времени и гравитационного сдвига частоты. Этот эффект эксцентриситета приводит к тому, что разница в тактовой частоте спутника GPS и приемника увеличивается или уменьшается в зависимости от высоты спутника.
Чтобы компенсировать это несоответствие, стандарту частоты на борту каждого спутника перед запуском дается сдвиг скорости, что делает его немного медленнее, чем желаемая частота на Земле; в частности, на 10,22999999543 МГц вместо 10,23 МГц.[18] Поскольку атомные часы на борту спутников GPS точно настроены, это делает систему практическим инженерным приложением научной теории относительности в реальной среде.[19] Размещение атомных часов на искусственных спутниках для проверки общей теории Эйнштейна было предложено Фридвардт Винтерберг в 1955 г.[20]
Расчет замедления времени
Чтобы рассчитать количество ежедневного замедления времени, которое испытывают спутники GPS относительно Земли, нам необходимо отдельно определить суммы, связанные с специальная теория относительности (скорость) и общая теория относительности (гравитация) и сложите их вместе.
Сумма из-за скорости будет определяться с помощью Преобразование Лоренца. Это будет:
Для малых значений v / c, используя биномиальное разложение это приблизительно:
Спутники GPS движутся на 3874 м / с относительно центра Земли.[18] Таким образом, мы определяем:
Эта разница ниже 1 из 8.349×10−11 представляет собой долю, на которую часы спутников движутся медленнее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
То есть часы спутников теряют 7214 наносекунд в сутки из-за специальная теория относительности последствия.
- Обратите внимание, что эта скорость 3874 м / с измеряется относительно центра Земли, а не ее поверхности, где находятся приемники GPS (и пользователи). Это связано с тем, что эквипотенциал Земли делает чистое замедление времени равным по всей ее геодезической поверхности.[21] То есть комбинация специальных и общих эффектов делает чистое замедление времени на экваторе равным таковому у полюсов, которые, в свою очередь, покоятся относительно центра. Следовательно, мы используем центр как опорную точку для представления всей поверхности.
Степень расширения под действием силы тяжести будет определяться с помощью гравитационное замедление времени уравнение:
Для малых значений Мистер, используя биномиальное разложение это приблизительно:
Нас снова интересует только дробь меньше 1 и разница между Землей и спутниками. Для определения этой разницы берем:
Земля имеет радиус 6,357 км (на полюсах), что рземной шар = 6 357 000 м, а спутники имеют высоту 20 184 км.[18] делая их радиус орбиты рGPS = 26 541 000 м. Подставив их в приведенное выше уравнение, с Mземной шар = 5.974×1024, грамм = 6.674×10−11, и c = 2.998×108 (все в SI ед.), дает:
Это часть, на которую часы спутников движутся быстрее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
То есть часы спутников набирают 45 850 наносекунд в день за счет общая теория относительности последствия. Эти эффекты суммируются, чтобы дать (округлено до 10 нс):
- 45850 — 7210 = 38640 нс
Таким образом, часы спутников набирают примерно 38 640 наносекунд в день или 38,6 мкс в день в целом из-за эффектов относительности.
Чтобы компенсировать это усиление, частота часов GPS должна быть уменьшена на долю:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
Эта доля вычитается из 1 и умножается на предварительно настроенную тактовую частоту 10,23 МГц:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
То есть нам нужно замедлить частоту с 10,23 МГц до 10,22999999543 МГц, чтобы свести на нет эффекты относительности.
Искажение Саньяка
Обработка данных GPS-наблюдений также должна компенсировать Эффект Саньяка. Шкала времени GPS определяется в инерционный системы, но наблюдения обрабатываются в В центре Земли, фиксировано на Земле (совместно вращающаяся) система, система, в которой одновременность не определено однозначно. Таким образом, для преобразования инерциальной системы в систему ECEF применяется преобразование координат. Полученная коррекция времени прохождения сигнала имеет противоположные алгебраические знаки для спутников в Восточном и Западном небесных полушариях. Игнорирование этого эффекта приведет к ошибке восток-запад порядка сотен наносекунд или десятков метров в местоположении.[22]
Естественные источники помех
Поскольку сигналы GPS на наземных приемниках обычно относительно слабые, естественные радиосигналы или рассеяние сигналов GPS могут снижать чувствительность приемник, что затрудняет или делает невозможным получение и отслеживание спутниковых сигналов.
Космическая погода ухудшает работу GPS двумя способами: прямые помехи из-за всплесков солнечного радио в той же полосе частот[23] или путем рассеяния радиосигнала GPS на ионосферных неоднородностях, называемого сцинтилляцией.[24] Обе формы деградации следуют за 11-летием. солнечный цикл и максимальны при максимуме солнечных пятен, хотя они могут произойти в любое время. Солнечные радиовсплески связаны с солнечные вспышки и выбросы корональной массы (CME)[25] и их воздействие может повлиять на прием на половине Земли, обращенной к Солнцу. Сцинтилляция чаще всего возникает в тропических широтах, где это ночное явление. Это происходит реже в высоких или средних широтах, где магнитные бури могут приводить к мерцанию.[26] Помимо мерцаний, магнитные бури могут создавать сильные ионосферные градиенты, снижающие точность систем SBAS.[27]
Искусственные источники помех
В автомобильных GPS-приемниках металлические детали на лобовых стеклах,[28] например, антиобледенители или тонировочные пленки для автомобильных стекол[29] может действовать как Клетка Фарадея, унизительный прием прямо в машине.
Рукотворный EMI (электромагнитные помехи) также могут нарушить или варенье Сигналы GPS. В одном хорошо задокументированном случае невозможно было принимать сигналы GPS во всей гавани Моховая посадка, Калифорния из-за непреднамеренных помех, вызванных неисправностью предварительных усилителей телевизионной антенны.[30][31] Также возможно преднамеренное заклинивание. Как правило, более сильные сигналы могут создавать помехи для приемников GPS, когда они находятся в пределах радиосвязи или в пределах прямой видимости. В 2002 году в онлайн-журнале было опубликовано подробное описание того, как построить глушитель GPS L1 C / A ближнего действия. Phrack.[32]
В правительство США считает, что такие глушилки иногда использовались во время Война в Афганистане, а военные США утверждают, что уничтожили шесть глушителей GPS во время Война в Ираке, в том числе тот, который был уничтожен бомбой с наведением GPS.[33] Глушитель GPS относительно легко обнаружить и найти, что делает его привлекательной целью для противорадиационные ракеты. 7 и 8 июня 2007 года Министерство обороны Великобритании провело испытания системы постановки помех в западной части Великобритании.[нужна цитата ]
В некоторых странах разрешено использование ретрансляторов GPS для приема сигналов GPS в помещении и в недоступных местах; в то время как в других странах это запрещено, поскольку ретранслируемые сигналы могут вызывать многолучевые помехи для других приемников GPS, которые получают данные как от спутников GPS, так и от ретранслятора. В Великобритании Ofcom теперь разрешает использование репитеров GPS / GNSS.[34] в режиме «облегченного лицензирования».
Из-за возможности возникновения как естественного, так и искусственного шума продолжают развиваться многочисленные методы устранения помех. Первое — не полагаться на GPS как на единственный источник. По словам Джона Рули, «IFR у пилотов должен быть запасной план на случай отказа GPS ».[35] Автономный мониторинг целостности приемника (RAIM) — это функция, включенная в некоторые приемники, предназначенная для предупреждения пользователя при обнаружении помех или другой проблемы. Американские военные также развернули с 2004 г. Модуль выборочной доступности / защиты от спуфинга (SAASM) в Усовершенствованный GPS-приемник Defense (ДАГР).[36] В демонстрационных видеороликах было показано, что DAGR обнаруживает помехи и сохраняет свою блокировку на зашифрованных сигналах GPS во время помех, из-за которых гражданские приемники теряют захват.
Смотрите также
- Дополнение GPS
Примечания
- ^ Тот же принцип и лежащая в его основе математика можно найти в описании хронометраж пульсаров астрономами.
- ^ Navipedia: Мониторинг тропосферы
- ^ Navipedia: задержка тропосферы
- ^ Navipedia: Multipath
- ^ Отчет о ходе работы IPN 42-159 (2004)
- ^ SNT080408. «Пример эфемеридного сервера». Tdc.co.uk. Архивировано из оригинал 12 января 2009 г.. Получено 2009-10-13.
- ^ «Блок 1 — Введение в GPS». Архивировано из оригинал 29 апреля 2009 г.
- ^ «Введение в пользовательское оборудование NAVSTAR GPS» (PDF). Центр навигации береговой охраны США. Береговая охрана США. Сентябрь 1996. Получено 5 июля, 2014.
- ^ Паркинсон (1996)
- ^ Grewal (2001), стр. 103.
- ^ «Президент Клинтон приказывает прекратить выборочную доступность GPS».
- ^ а б «Заявление президента относительно решения США прекратить снижение точности глобальной системы позиционирования». Федеральная авиационная администрация. 1 мая 2000 г.. Получено 2013-01-04.
- ^ «DoD навсегда прекращает закупку выборочной доступности глобальной системы позиционирования». DefenseLink. 18 сентября 2007 г. Архивировано с оригинал 18 февраля 2008 г.. Получено 2008-02-20.
- ^ «Выборочная доступность». Национальный космический исполнительный комитет по позиционированию, навигации и хронометражу. Архивировано из оригинал 13 января 2008 г.. Получено 2008-02-20.
- ^ Уэбб (2004), стр. 32.
- ^ Ризос, Крис. Университет Нового Южного Уэльса. Спутниковые сигналы GPS В архиве 2010-06-12 на Wayback Machine. 1999.
- ^ Фараони, Валерио (2013). Специальная теория относительности (иллюстрированный ред.). Springer Science & Business Media. п. 54. ISBN 978-3-319-01107-3. Выдержка страницы 54
- ^ а б c Глобальная система позиционирования Роберта А. Нельсона через спутник, Ноябрь 1999 г.
- ^ Погге, Ричард В .; «Реальная теория относительности: система навигации GPS». Проверено 25 января 2008 года.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Получено 2009-10-23.
- ^ С. П. Дрейк (январь 2006 г.). «Принцип эквивалентности как ступенька от специальной теории относительности к общей» (PDF). Являюсь. J. Phys., Vol. 74, №1. С. 22–25.
- ^ Эшби, Нил Относительность и GPS. Физика сегодня, Май 2002 г.
- ^ Черрути А., П. М. Кинтнер, Д. Э. Гэри, А. Дж. Маннуччи, Р. Ф. Мейер, П. Х. Доэрти и А. Дж. Костер (2008), Влияние интенсивных солнечных радиовсплесков в декабре 2006 г. на приемники GPS, Космическая погода, Дои:10.1029 / 2007SW000375, 19 октября 2008 г.
- ^ Аарон, Жюль; Басу, Сантимей (1994). «Ионосферные амплитудные и фазовые флуктуации на частотах GPS». Труды ION GPS. 2: 1569–1578.
- ^ С. Манкузо и Дж. К. Раймонд, «Корональные транзиенты и метрические радиовсплески типа II. I. Эффекты геометрии, 2004 г., Астрономия и астрофизика, т. 413, стр. 363-371»
- ^ Ледвина, Б. М .; Дж. Дж. Макела и П. М. Кинтнер (2002). «Первые наблюдения интенсивных мерцаний амплитуды GPS L1 на средних широтах». Письма о геофизических исследованиях. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. Дои:10.1029 / 2002GL014770.
- ^ Том Диль, Солнечные вспышки поражают Землю — WAAS изгибается, но не ломается, Новости спутниковой навигации, том 23, июнь 2004 г.
- ^ «Крепление I-PASS для автомобилей с особыми функциями лобового стекла» (PDF). Архивировано из оригинал (PDF) 26 марта 2010 г.
- ^ «3М Автомобильные пленки».. Обратите внимание, что пленки со стабильным цветом специально описаны как нет создание помех спутниковым сигналам.
- ^ «Охота на RFI». GPS мир. 1 января 2003 г.
- ^ «Клуб соответствия требованиям EMC» банановые кожуры «колонка 222». Compliance-club.com. Получено 2009-10-13.
- ^ Недорогой портативный глушитель GPS. Phrack выпуск 0x3c (60), статья 13. Опубликовано 28 декабря 2002 г.
- ^ Пресс-служба американских войск. Прогресс Centcom. 25 марта 2003 г. В архиве 3 декабря 2009 г. Wayback Machine
- ^ [1] Заявление Ofcom о режиме авторизации для ретрансляторов GNSS
- ^ Рули, Джон. AVweb. Глушение GPS. 12 февраля 2003 г.
- ^ Страница DAGR армии США В архиве 2012-08-05 в Archive.today
Рекомендации
- Grewal, Mohinder S .; Вайль, Лоуренс Рэндольф; Эндрюс, Ангус П. (2001). Системы глобального позиционирования, инерциальная навигация и интеграция. Джон Уайли и сыновья. ISBN 978-0-47135-032-3.
- Паркинсон; Спилкер (1996). Система глобального позиционирования. Американский институт аэронавтики и астрономии. ISBN 978-1-56347-106-3.
- Уэбб, Стивен (2004). Не из этого мира: сталкивающиеся вселенные, браны, струны и другие дикие идеи современной физики. Springer. ISBN 0-387-02930-3. Получено 2013-08-16.
внешняя ссылка
- GPS.gov —Общий веб-сайт общественного образования, созданный правительством США.
- Стандарт производительности GPS SPS — Официальная спецификация стандартной службы позиционирования (версия 2008 г.).
- Стандарт производительности GPS SPS — Официальная спецификация стандартной службы позиционирования (версия 2001 г.).
Анализ ошибок для глобальной системы позиционирования — Error analysis for the Global Positioning System
Концепция художника о спутнике GPS Block II-F на орбите
Анализ ошибок для Глобальная система позиционирования важна для понимания того, как работает GPS, и для понимания величины ожидаемых ошибок. GPS вносит поправки на ошибки часов, приемника и другие эффекты, но остаются остаточные ошибки, которые не исправляются. Положение приемника GPS вычисляется на основе данных, полученных со спутников. Ошибки влияния от геометрического снижения точности и показателей, перечисленных в таблице ниже.
Содержание
- 1 Обзор
- 2 Измерение времени прихода сигнала
- 3 Атмосферные эффекты
- 4 Многолучевые эффекты
- 5 Эфемериды и ошибки часов
- 6 Геометрическое снижение точности вычислений (GDOP)
- 6.1 Вычисление геометрического снижения точности
- 6.2 Вывод расчетов геометрического снижения точности
- 7 Выборочная доступность
- 8 Антиспуфинг
- 9 Относительность
- 9.1 Специальная и общая теория относительности
- 9.2 Расчет замедления времени
- 9.3 Искажение Саньяка
- 10 Естественные источники помех
- 11 Искусственные источники помех
- 12 См.
- 13 Примечания
- 14 Ссылки
- 15 Внешние ссылки
Обзор
Источники ошибок эквивалентного диапазона пользователя (UERE)
| Источник | Эффект (м) |
|---|---|
| Поступление сигнал C / A | ± 3 |
| Сигнал приход P (Y) | ± 0,3 |
| Ионосферные эффекты | ± 5 |
| Погрешности эфемерид | ± 2,5 |
| Ошибки спутниковых часов | ± 2 |
| Многолучевое искажение | ± 1 |
| Troposp Герические эффекты | ± 0, 5 |
| 3 σ R { Displaystyle 3 sigma _ {R}}C / A |
± 6,7 |
| 3 σ R { Displaystyle 3 sigma _ {R}}P (Y) |
± 6.0 |
Диаграмма геометрических погрешностей, показывающая типичное соотношение положения приемника, пересечение сфер, и истинное положение приемника с точки зрения ошибок, PDOP и числовых ошибок
Ошибки эквивалентного диапазона пользователя (UERE) показаны в таблице. Существует также числовая ошибка с точной величиной σ n u m { displaystyle sigma _ {num}}
Термин «ошибка эквивалентного диапазона пользователя» (UERE) относится к компоненту на расстоянии от приемника до спутника. Эти ошибки UER представляют собой ошибки как ±, что они представляют собой несмещенными или нулевыми средними средними. Поэтому эти ошибки UERE используются при вычислении стандартных отклонений. Стандартное отклонение ошибки в положении приемника, σ rc { displaystyle sigma _ {rc}}
PDOP вычисляется как функция положения приемника и спутника. Подробное описание того, как рассчитать PDOP, приведено в разделе Геометрическое снижение точности вычислений (GDOP).
σ R { displaystyle sigma _ {R}}
- 3 σ R = 3 2 + 5 2 + 2,5 2 + 2 2 + 1 2 + 0,5 2 m = 6,7 m { displaystyle 3 sigma _ {R} = { sqrt { 3 ^ {2} + 5 ^ {2} + 2.5 ^ {2} + 2 ^ {2} + 1 ^ {2} + 0.5 ^ {2}}} , mathrm {m} , = , 6.7 , mathrm {m}}
Стандартное отклонение ошибки в расчетном положении приемника σ rc { displaystyle sigma _ {rc}}
- σ rc = PDOP 2 × σ R 2 + σ число 2 = PDOP 2 × 2,2 2 + 1 2 м { displaystyle sigma _ {rc} = { sqrt {PDOP ^ {2} times sigma _ {R} ^ {2} + sigma _ {num} ^ {2}}} = { sqrt {PDOP ^ {2} times 2.2 ^ {2} + 1 ^ {2}}} , mathrm {m}
Диаграмма ошибок слева показывает положение положения приемника, истинного положения приемника и пересечения четырех поверхностей.
Измерение времени прихода сигнала
Для определения местоположения, вычисляемого приемником GPS, требуется текущее время, местоположение спутника и измеренная задержка принятого сигнала. Точность определения местоположения в первую очередь зависит от местоположения спутника и задержки сигнала.
Чтобы измерить задержку, приемник сравнивает битовую последовательность, полученную от спутника, с версией, созданной внутри. Сравнивая передний и задний фронты битовых переходов, современная электроника может измерять смещение сигнала с точностью до одного процента от ширины битового импульса, 0,01 × 300, 000, 000 м / с (1,023 × 10 6 / с). { displaystyle { frac {0,01 times 300000000 м / с} {(1.023 times 10 ^ {6} / mathrm {s})}}}
Этот компонент точности положения может быть улучшен в 10 раз, используя сигнал P (Y) с более высокой чиповой скоростью. Предполагаемая тот же самый процент точности ширины битового импульса, высокочастотный сигнал P (Y) дает точность (0,01 × 300, 000, 000 м / с) (10,23 × 10 6 / с) { displaystyle { frac {(0,01 times 300000000 mathrm {m / s})} {(10.23 times 10 ^ {6} / mathrm {s})}}}
Атмосферные эффекты
Несогласованность атмосферных условий влияет на скорость сигналов GPS, когда они проходят через атмосферу Земли, особенно ионосферу. Исправление этих ошибок является серьезной проблемой для повышения точности определения местоположения GPS. Эти эффекты минимальны, когда спутник находится прямо над головой, когда спутник находится прямо над головой, и сильнее для спутников, спутников к горизонту, благодаря пути через атмосферу длиннее (см. воздушная масса ). Как только приблизительное местоположение приемника известно, можно использовать математическую модель для оценки и компенсации этих ошибок.
Ионосферная задержка микроволнового сигнала зависит от его частоты. Он возникает из ионизированной атмосферы (см. Содержание электронов ). Это явление известно как дисперсия и может быть вычислено на основе измерений задержек для двух или более полос частот, что позволяет использовать задержки на других частотах. Некоторые военные и дорогие гражданские приемники исследовательского класса атмосферную дисперсию на различных задержек на частотах L1 и L2 и применяют более точную поправку. Это может быть сделано в гражданских приемниках без дешифрования P (Y), передаваемого по L2 путем использования несущей вместо модулированного кода. Чтобы облегчить это на более дешевых приемниках, новый гражданский кодовый сигнал на L2, названный L2C, был добавлен к спутникам Block IIR-M, которые впервые были запущены в 2005 году. Он позволяет прямое сравнение сигналов L1 и L2 с использованием кодированных сигнал вместо несущей.
Воздействие ионосферы обычно изменяется медленно и может быть усреднено по времени. Эти значения для географической области можно легко вычислить, сравнив положение, измеренное с помощью GPS, с местом расположения. Эта поправка также действительна для других приемников в том же месте. Некоторые системы отправляют эту информацию по радио или другим каналам, чтобы приемники, работающие только на L1, могли вносить ионосферные поправки. Ионосферные данные передаются через спутник в спутниковых системах расширения (SBAS), таких как Wide Area Augmentation System (WAAS) (доступна в Северной Америке и на Гавайях), EGNOS (Европа и Азия), Многофункциональная спутниковая система дополнения (MSAS) (Япония) и GPS Aided Geo Augmented Navigation (GAGAN) (Индия), которая передает данные на GPS с использованием Специальная псевдослучайной шумовой псевовой последовательности (PRN), поэтому требуются только один приемник и антенна.
Влажность вызывает переменную задержку, приводящую к ошибкам, аналогичным ионосферной задержке, но вызывающим в тропосфере. Этот эффект более локализован, чем ионосферные эффекты, изменяется быстрее и не зависит от частоты. Эти характеристики делают измерение и компенсацию выбросов более сложными, чем ионосферные эффекты.
Атмосферное давление также может задержку приема сигналов из-за присутствия сухих газов в тропосфере (78% N2, 21% O2, 0,9% Ar…). Его влияние меняется в зависимости от местной температуры и атмосферного давления, вполне предсказуемым образом с использованием идеальных газов.
Эффекты многолучевого распространения
На сигналы GPS также может влиять многолучевость проблемы, при которых радиосигналы отражаются от окружающей местности; здания, стены каньона, твердый грунт и т. д. Эти задержанные сигналы ошибки измерения, которые различны для каждого типа сигнала GPS из-за его зависимости от длины волны.
Разнообразие методов, в первую очередь узкое расстояние между корреляторами, были разработаны для уменьшения ошибок, связанных с многолучевым распространением. При многолучевом распространении с большой задержкой приемник сам может распознать попутный сигнал и отбросить его. Для решения проблемы многолучевого распространения с более короткой задержкой сигнала, отражающегося от земли, местные антенны (например, кольцевая антенна ) для уменьшения мощности сигнала, принимаемой антенной. Отражения с короткой задержкой труднее отфильтровать, потому что они мешают истинному сигналу, вызывая эффекты, почти неотличимые от обычных атмосферных атмосферных явлений.
Эффекты многолучевого распространения менее серьезны для движущихся транспортных средств. Когда антенна GPS сходится, ложные решения с использованием отраженных сигналов быстро не идут, и только прямые сигналы приводят к стабильным решениям.
Ошибки эфемерид и часов
Хотя данные эфемерид передаются каждые 30 секунд, сама информация может быть старше двух часов. Изменчивость давления солнечной радиации влияет на точность GPS из-за влияния на ошибки эфемерид. Если требуется быстрое время для первого исправления (TTFF), можно загрузить действительные эфемериды в приемник, и в дополнение к установке времени определения местоположения может быть получено чем за десять секунд. Такие эфемеридные данные можно связать в Интернете, чтобы их можно было загрузить в мобильное устройство GPS. См. Также Assisted GPS.
Атомные часы спутников испытывают шум и ошибки дрейфа часов. В навигационном сообщении исправления этих ошибок и точности плохих часов. Однако они основаны на наблюдениях и могут указывать на текущее состояние часов.
Эти проблемы, как правило, очень маленькие, но могут составлять несколько метров (десятков футов) неточности.
Для очень точного позиционирования (например, в геодезии ) эти эффекты могут быть устранены с помощью дифференциальной GPS : одновременного использования двух или более приемников в нескольких точках съемки. В 1990-х годах, когда были разработаны некоторые методы квазидифференциальной системы GPS, использовались некоторые приемники, которые использовались только один приемник, но повторно использовались точки измерения. В Венском техническом университете метод получил название qGPS, и было разработано программное обеспечение для постобработки.
Геометрическое снижение точности вычислений (GDOP)
Вычисление геометрического снижения точности
Концепция геометрического снижения точности было введено в раздел, источники ошибок и анализ. Были предоставлены расчеты, чтобы показать, как использовался PDOP и как он влиял на стандартное отклонение ошибки местоположения приемника.
Когда видимые спутники GPS расположены близко друг к другу в небе (т. Е. С небольшим угловым разделением), значения DOP высокие; когда они далеко друг от друга, значения DOP низкие. Предусмотрено, что предоставлены предоставленные близко друг к другу спутники, которые находятся на большом расстоянии друг от друга. Низкие значения DOP обеспечивает лучшую точность позиционирования GPS из-за более широкого углового разнесения между спутниками, используемыми для расчета положения приемника GPS. HDOP, VDOP, PDOP и TDOP — это соответственно по горизонтали, вертикали, позиции (3-D) и временного снижения точности.
Рис. 3.1 Снижение точности данных Navstar GPS от береговой охраны США обеспечивает представление о том, как геометрия влияет на точность.
Теперь мы беремся за задачу, как вычислить снижение точности термины. В качестве первого шага в вычислении DOP рассмотрим единый вектор от приемника к спутнику я с компонентами (xi — x) R i { displaystyle { frac {(x_ {i} -x)} {R_ {i}}} }
- R i = (xi — x) 2 + (yi — y) 2 + (zi — z) 2 { displaystyle R_ {i} , = , { sqrt {(x_ {i} -x) ^ {2} + (y_ {i} -y) ^ {2} + (z_ {i} -z) ^ {2}}}}
где x, y, { displaystyle x, y,}
- A = [(x 1 — x) R 1 (y 1 — y) R 1 (z 1 — z) R 1 1 (x 2 — x) R 2 (y 2 — y) К 2 (z 2 — z) R 2 1 (x 3 — x) R 3 (y 3 — y) R 3 (z 3 — z) R 3 1 (x 4 — x) R 4 (y 4 — y).) R 4 (z 4 — z) R 4 1] { displaystyle A = { begin {bmatrix} { frac {(x_ {1} -x)} {R_ {1}}} { frac {( y_ {1} -y)} {R_ {1}}} { frac {(z_ {1} -z)} {R_ {1}}} 1 { frac {(x_ {2} — x)} {R_ {2}}} { frac {(y_ {2} -y)} {R_ {2}}} и { frac {(z_ {2} -z)} {R_ {2} }} 1 { frac {(x_ {3} -x)} {R_ {3}}} { frac {(y_ {3} -y)} {R_ {3}}} и { frac {(z_ {3} -z)} {R_ {3}}} 1 { frac {(x_ {4} -x)} {R_ {4}}} { frac {(y_ { 4} — y)} {R_ {4}}} { frac {(z_ {4} -z)} {R_ {4}}} 1 end {bmatrix}}}
Первые три элемента каждого A — компоненты единичного вектора от приемника до спутника. Элементами в четвертом столбце являются c, где c обозначает скорость света. Сформулируйте матрицу Q в виде
- Q = (ATA) — 1 { displaystyle Q = left (A ^ {T} A right) ^ {- 1}}
Это вычисление выполняется в соответствии с главой 11 Глобальной системы позиционирования Паркинсона и Спилкера, где весовая матрица P установлена равной единичной матрице. Элементы матрицы Q обозначаются как:
- Q = [dx 2 dxy 2 dxz 2 dxt 2 dxy 2 dy 2 dyz 2 dyt 2 dxz 2 dyz 2 dz 2 dzt 2 dxt 2 dyt 2 dzt 2 dt 2] { displaystyle Q = { begin {bmatrix} d_ {x} ^ {2} d_ {xy} ^ {2} d_ {xz} ^ {2} d_ {xt} ^ {2} d_ {xy} ^ {2 } d_ {y} ^ {2} d_ {yz} ^ {2} d_ {yt} ^ {2} d_ {xz} ^ {2} d_ {yz} ^ {2} d_ { z} ^ {2} d_ {zt} ^ {2} d_ {xt} ^ {2} d_ {yt} ^ {2} d_ {zt} ^ {2} d_ {t} ^ { 2} end {bmatrix}}}
Греческая буква σ { displaystyle sigma}
- P D O P = d x 2 + d y 2 + d z 2 T D O P = d t 2 = | д т | GDOP = PDOP 2 + TDOP 2 { displaystyle { begin {align} PDOP = { sqrt {d_ {x} ^ {2} + d_ {y} ^ {2} + d_ {z} ^ {2}} } TDOP = { sqrt {d_ {t} ^ {2}}} = | d_ {t} | GDOP = { sqrt {PDOP ^ {2} + TDOP ^ {2}}} end {выровнено}}
в соответствии с «Разделом 1.4.9 ПРИНЦИПОВ РАЗМЕЩЕНИЯ СПУТНИКОВ».
Горизонтальное снижение точности, HDOP = dx 2 + dy 2 { displaystyle HDOP = { sqrt {d_ {x} ^ {2} + d_ {y} ^ {2}}}}
Вывод для сравнения геометрического снижения точности
Уравнения для геометрического снижения точности были в предыдущем разделе. В этом разделе описывается вывод этих соотношений. Используемый здесь метод аналогичен методу, использованному в «Глобальная система позиционирования (предварительный просмотр) Паркинсона и Спайкера»
Рассмотрим вектор ошибки положения, e { displaystyle mathbf {e}}
- A [exeyezet] = [(x 1 — x) R 1 (y 1 — y) R 1 (z 1 — z) R 1 1 (x 2 — x) R 2 (y 2 — y) R 2 (z 2 — z) R 2 1 (x 3 — x) R 3 (y 3 — y) R 3 (z 3 — z) R 3 1 (x 4 — x) R 4 (y 4 — y) R 4 (z 4 — z) R 4 1] [exeyezet] = [e 1 e 2 e 3 e 4] (1) { displaystyle A { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} = { begin {bmatrix} { frac {(x_ {1} -x)} {R_ {1}}} { frac {(y_ { 1} -y)} {R_ {1}}} { frac {(z_ {1} -z)} {R_ {1}}} 1 { frac {(x_ {2} -x)} {R_ {2}}} { frac {(y_ {2} -y)} {R_ {2}}} и { frac {(z_ {2} -z)} {R_ {2}}} 1 { frac {(x_ {3} -x)} {R_ {3}}} { frac {(y_ {3} -y)} {R_ {3}}} { frac {(z_ {3} -z)} {R_ {3}}} 1 { frac {(x_ {4} -x)} {R_ {4}}} { frac {(y_ {4} -y) } {R_ {4}}} { frac {(z_ {4} -z)} {R_ {4}}} 1 end {bmatrix}} { begin {bmatrix} e_ {x} e_ { y} e_ {z} e_ {t} end {bmatrix}} = { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} конец {bmatrix}} (1)}
где е 1 { displaystyle e_ {1}}
- [exeyezet] = A — 1 [e 1 e 2 e 3 e 4] (2) { Displaystyle { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} = A ^ {- 1} { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bmatrix}} (2)}
Перемещение сторон:
- [exeyezet] = [e 1 e 2 e 3 e 4] (A — 1) T (3) { displaystyle { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} = { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bmatrix}} left (A ^ {- 1} right) ^ {T} ( 3)}
После умножения матриц с обеих сторон уравнения (2) на соответствующие матрицы в уравнении (3) accept
- [exeyezet] [exeyezet] = A — 1 [e 1 e 2 e 3 e 4] [e 1 е 2 е 3 е 4] (A — 1) T (4) { displaystyle { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} = A ^ {- 1} { begin {bmatrix} e_ { 1} e_ {2} e_ {3} e_ {4} end {bmatrix}} { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bma trix}} left (A ^ { — 1} right) ^ {T} (4)}
Взяв ожидаемое значение с обеих сторон и взяв неслучайные матрицы за пределами оператора ожидания, E, получаем результат:
- E ([exeyezet] [exeyezet]) Знак равно A — 1 E ([e 1 e 2 e 3 e 4] [e 1 e 2 e 3 e 4]) (A — 1) T (5) { Displaystyle E left ({ begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ { t} end {bmatrix}} right) = A ^ {- 1} E left ({ begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bmatrix}} { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bmatrix}} right) left (A ^ {- 1} справа) ^ {T} (5)}
Предполагая, что ошибки псевдодальности некоррелированы и имеют одинаковую дисперсию, ковариационная матрица справа может быть выражена как скаляр, умноженный на единичную матрицу. Таким образом,
- [σ x 2 σ xy 2 σ xz 2 σ xt 2 σ xy 2 σ y 2 σ yz 2 σ yt 2 σ xz 2 σ yz 2 σ z 2 σ zt 2 σ xt 2 σ yt 2 σ zt 2 σ T 2] знак равно σ р 2 A — 1 (A — 1) T знак равно σ R 2 (ATA) — 1 (6) { displaystyle { begin {bmatrix} sigma _ {x} ^ { 2} sigma _ {xy} ^ {2} sigma _ {xz} ^ {2} sigma _ {xt} ^ {2} sigma _ {xy} ^ {2} sigma _ {y} ^ {2} sigma _ {yz} ^ {2} sigma _ {yt} ^ {2} sigma _ {xz} ^ {2} sigma _ {yz} ^ {2} sigma _ {z} ^ {2} sigma _ {zt} ^ {2} sigma _ {xt} ^ {2} sigma _ {yt} ^ {2} sigma _ {zt} ^ {2} sigma _ {t} ^ {2} end {bmatrix}} = sigma _ {R} ^ {2} A ^ {- 1} left (A ^ { — 1} справа) ^ {T} = sigma _ {R} ^ {2} left (A ^ {T} A right) ^ {- 1} (6)}
начиная с A — 1 (A — 1) T (ATA) = I { displaystyle A ^ {- 1} left (A ^ {- 1} right) ^ {T} left (A ^ {T} A right) = I}
Примечание: (A — 1) T = (AT) — 1, { displaystyle left (A ^ {- 1} right) ^ {T} = left (A ^ {T} right) ^ {- 1},}
Замена на (ATA) — 1 = Q { dis playstyle left (A ^ {T} A right) ^ {- 1} = Q}
- [σ x 2 σ xy 2 σ xz 2 σ xt 2 σ xy 2 σ y 2 σ yz 2 σ yt 2 σ xz 2 σ yz 2 σ z 2 σ zt 2 σ xt 2 σ yt 2 σ zt 2 σ t 2] = σ R 2 [dx 2 dxy 2 dxz 2 dxt 2 dxy 2 dy 2 dyz 2 dyt 2 dxz 2 dyz 2 dz 2 dzt 2 dxt 2 dyt 2 dzt 2 dt 2] (7) { displaystyle { begin {bmatrix} sigma _ {x} ^ {2} sigma _ {xy} ^ {2} sigma _ {xz} ^ {2} sigma _ {xt} ^ {2} sigma _ {xy} ^ {2} sigma _ {y} ^ {2} сигма _ {yz} ^ {2} sigma _ {yt} ^ {2} sigma _ {xz} ^ {2} sigma _ {yz} ^ {2} sigma _ {z} ^ {2} сигма _ {zt} ^ {2} sigma _ {xt} ^ {2} sigma _ {yt} ^ {2} sigma _ {zt} ^ {2} sigma _ {t} ^ {2} end {bmatrix}} = sigma _ {R} ^ {2} { begin {bmatrix} d_ {x} ^ {2} d_ {xy} ^ {2} d_ {xz} ^ {2} d_ {x t} ^ {2} d_ {xy} ^ {2} d_ {y} ^ {2} d_ {yz} ^ {2} d_ {yt} ^ {2} d_ {xz} ^ {2} d_ {yz} ^ {2} d_ {z} ^ {2} d_ {zt} ^ {2} d_ {xt} ^ {2} d_ {yt} ^ {2} d_ {zt} ^ {2} d_ {t} ^ {2} end {bmatrix}} (7)}
Из уравнения (7) следует, что отклонения положения приемника и времени
- σ rc 2 знак равно σ Икс 2 + σ Y 2 + σ Z 2 знак равно σ р 2 (dx 2 + dy 2 + dz 2) = PDOP 2 σ R 2 { Displaystyle sigma _ {rc} ^ {2} = sigma _ {x} ^ {2} + sigma _ {y} ^ {2} + sigma _ {z} ^ {2} = sigma _ {R} ^ {2} left (d_ {x} ^ { 2} + d_ {y} ^ {2} + d_ {z} ^ {2} right) = PDOP ^ {2} sigma _ {R} ^ {2}}
- σ T 2 знак равно σ р 2 dt 2 знак равно TDOP 2 σ р 2 { Displaystyle sigma _ {t} ^ {2} = sigma _ {R} ^ {2} d_ {t} ^ {2} = TDOP ^ {2} sigma _ {R} ^ {2}}
Остальные члены дисперсии ошибки положения и времени след просто.
Выборочная доступность
В GPS включена функция выборочной доступности (SA), которая первимеренные изменяющиеся во времени ошибки до 100 метров (328 футов) к общедоступным навигационным сигналом. Это было сделано с целью запретить противнику использовать гражданские приемники GPS для наведения высокоточного оружия.
Ошибки SA на самом деле являются псевдослучайными, генерируемыми криптографическим алгоритмом из секретного начального ключа, доступного только авторизованным пользователям (вооруженным силам США, их союзникам и некоторым другим пользователям, в основном правительственным) специальный военный GPS-приемник. Простого владения приемником недостаточно; ему по-прежнему нужен строго контролируемый ежедневный ключ.
Перед отключением 2 мая 2000 г. типичные ошибки SA составляли около 50 м (164 футов) по горизонтали и около 100 м (328 футов) по вертикали. SA влияет на каждый приемник. GPS в данной области, фиксированная станция с определением местоположения. Это называется дифференциальным GPS или DGPS. DGPS также исправляет несколько других важных источников ошибок GPS, в частности, ионосферную задержку, поэтому он широко распространяет, даже несмотря на то, что SA отключена. Неэффективность SA перед широко доступным DGPS была обычным аргументом в пользу отключения SA, и это было наконец сделано по приказу президента Клинтона в 2000 году.
Услуги ДГПС широко доступны из коммерческих и государственных источников. К последним войскам WAAS и США. Береговая охрана сеть морских навигационных маяков LF. Точность поправок зависит от расстояния между пользователем и приемником DGPS. По мере увеличения расстояния на двух участках не будут коррелировать, что приведет к менее точным дифференциальным поправкам.
Во время войны в Персидском заливе 1990–91 годов нехватка военных единиц GPS вынудила многих солдат и их семьи покупать легкодоступные гражданские единицы. Использовать такое решение для использования GPS.
В 1990-х годах FAA начало создания давления на военных, чтобы они навсегда отключили SA. Это позволяет бы FAA ежегодно экономить миллионы долларов на обслуживании их собственных радионавигационных систем. Количество добавленных ошибок было «обнулено» в полночь 1 мая 2000 г. после объявления президента США Билла Клинтона, разрешающего доступ к безошибочному сигналу L1. Согласно диреке, вызванная ошибка SA была изменена, чтобы не добавить ошибки к общедным сигналам (код C / A). Указ Клинтона требовал, чтобы SA была обнулена к 2006 году; это произошло в 2000 году, когда американские военные разработали новую систему, которая позволяет блокировать GPS (и другие навигационные услуги) враждебным силам в специфическом кризисе.
19 сентября 2007 года Министерство обороны США объявило, что будущие спутники GPS III не будут поддерживать SA, что в конечном итоге сделало бы постоянную.
Антиспуфинг
Остается еще одно ограничение на GPS, антиспуфинг. Это зашифровывает P-код, так что он не может быть имитирован передатчиком, отправляющим ложную информацию. Немногие гражданские приемники когда-либо использовали P-код, и точность, достигаемая с помощью общедоступного кода C / A, было намного лучше, чем ожидалось изначально (особенно с DGPS ). Настолько, что политика защиты от подделки практически не влияет на большинство гражданских пользователей. Отключение функции защиты от подделки в первую очередь услуг по геодезистам и некоторым ученым, которым требуется самое быстрое положение для экспериментов, таких как отслеживание движения тектонических плит.
Относ
Спутниковые часы замедляются из-за своей орбитальной скорости, но ускоряются из-за расстояния от гравитационного колодца Земли.
Существует ряд источников ошибок из-за релятивизма эффекты, которые сделают систему бесполезной, если ее не исправить. Три релятивистских эффекта — это замедление времени, гравитационный сдвиг частоты и эффекты эксцентриситета. Примеры включают релятивистское замедление времени из-за скорости спутника примерно 1 часть из 10, гравитационное замедление времени, из-за которого спутник движется примерно на 5 частей из 10 быстрее, чем земные часы, и эффект Саньяка из-за вращения относительно приемников на Земле. Эти темы рассматриваются ниже по очереди.
Специальная и общая теория относительности
Согласно теории относительности, из-за их постоянного движения и высоты относительно центрированной Земли, невращающейся ориентированной инерциальной системы отсчета на часы влияет их скорость. Специальная теория относительности предсказывает, что частота атомных часов, движущихся с орбитальной скоростью GPS, будет замедляться в , чем стационарные наземные часы, в v 2 2 c 2 ≈ 10-10 { displaystyle { frac {v ^ {2}} {2c ^ {2}}} приблизительно 10 ^ {- 10}}
Влияние сдвига частоты гравитации на GPS из-за общей теории относительности заключается в том, что часы расположены ближе к массивному объекту, будут медленнее, чем часы на более удаленном расстоянии. Применительно к GPS приемники находятся намного ближе к Земле, чем спутники, в результате чего часы GPS работают быстрее в 5 × 10 раз, или примерно на 45,9 мкс / день. Этот сдвиг частоты гравитации заметен.
При объединении замедления времени и гравитационного сдвига частоты расхождение составляет около 38 микросекунд в день, то есть разница в 4 465 частей на 10. Без исправления ошибок в позиции накапливаются примерно 11,4 км / день. Эта начальная ошибка псевдодальности исправляется в процессе решения навигационных уравнений. Вдобавок эллиптические, а не идеально круглые орбиты вызывают изменение во времени замедления времени и гравитационного сдвига частоты. Этот эффект эксцентриситета увеличивает или уменьшение разницы в тактовой частоте между спутником GPS и приемником в зависимости от высоты спутника.
Для компенсации несоответствия стандарту частоты на борту каждого спутника перед запуском идет сдвиг скорости, что делает его немного медленнее, чем желаемая частота на Земле; в частности, на 10,22999999543 МГц вместо 10,23 МГц. GPS-система автоматизированных часов на борту спутниковой связи. GPS точно настроена. Размещение атомных часов на искусственных спутниках для проверки общей теории Эйнштейна было предложено Фридвардтом Винтербергом в 1955 году.
Расчет количества замедления времени
Для расчета количества ежедневного замедления времени с помощью спутников GPS Земли нам нужно отдельно определить, обусловленные специальные теорией относительности (скорость) и общей теорией относительности (гравитация), и сложить их вместе.
Величина, обусловленная скоростью, будет определяться с помощью преобразования Лоренца. Это будет:
- 1 γ = 1 — v 2 c 2 { displaystyle { frac {1} { gamma}} = { sqrt {1 — { frac {v ^ {2}} {c ^ {2}}}}}}
Для малых значений v / c при использовании биномиального разложения это приближается к:
- 1 γ ≈ 1 — v 2 2 c 2 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {v ^ {2}} {2c ^ {2}}}}
Спутники GPS движутся со скоростью 3874 м / с относительно центра Земли. Таким образом, мы определяем:
- 1 γ ≈ 1 — 3874 2 2 (2,998 × 10
2 ≈ 1 — 8,349 × 10 — 11 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {3874 ^ {2}} {2 left (2,998 times 10 ^ {8} right) ^ {2}}} приблизительно 1-8,349 times 10 ^ {- 11}}
Эта разница ниже 1 из 8,349 × 10 представляет собой долю, на которую часы спутников движутся медленнее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
- — 8,349 × 10 — 11 × 60 × 60 × 24 × 10 9 ≈ — 7214 нс { displaystyle -8,349 times 10 ^ {- 11} times 60 times 60 times 24 times 10 ^ {9} приблизительно -7214 { text {ns}}}
То есть часы спутников теряют 7214 наносекунд в день из-за специальной теории относительности эффекты.
- Обратите внимание, что эта скорость 3874 м / с измеряется относительно центра Земли, а не ее поверхности, где находятся приемники GPS (и пользователи). Это потому, что эквипотенциал Земли делает чистое замедление времени равным по всей ее геодезической поверхности. То есть комбинация специальных и общих эффектов делает чистое замедление времени на экваторе равным таковому у полюсов, которые, в свою очередь, находятся в покое относительно центра.. Таким образом, мы будем использовать центр в качестве опорной точки, чтобы представлять всю поверхность
Количество дилатации под действием силы тяжести будет определяться с помощью гравитационное замедление времени уравнение:
- 1 γ = 1 — 2 GM rc 2 { displaystyle { frac {1} { gamma}} = { sqrt {1 — { frac {2GM} {rc ^ {2}}}}}}
Для малых значений M / r, используя биномиальное расширение, это приближается к:
- 1 γ ≈ 1 — GM rc 2 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {GM } {rc ^ {2}}}}
Нас снова интересует только дробь меньше 1 и разница между Землей и спутниками. Чтобы определить эту разницу, мы берем:
- Δ (1 γ) ≈ GM земля R земля c 2 — GM земля R gps c 2 { displaystyle Delta left ({ frac {1} { gamma}} right) приблизительно { frac {GM _ { text {earth}}} {R _ { text {earth}} c ^ {2}}} — { frac {GM _ { text {earth}}} {R _ { текст {gps}} c ^ {2}}}}
Земля имеет радиус 6 357 км (на полюсах), что составляет R земля = 6 357 000 м, а высота спутников составляет 20 184 км. их радиус орбиты R gps = 26 541 000 м. Подставляя их в вышеприведенное уравнение, с M земля = 5,974 × 10, G = 6,674 × 10 и c = 2,998 × 10 (все в единицах SI ), получаем:
- Δ (1 γ) ≈ 5,307 × 10–10 { displaystyle Delta left ({ frac {1} { gamma}} right) приблизительно 5,307 times 10 ^ {- 10}}
Это представляет собой долю, на которую часы спутников движутся быстрее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
- 5,307 × 10 — 10 × 60 × 60 × 24 × 10 9 ≈ 45850 нс { displaystyle 5.307 times 10 ^ {- 10} times 60 times 60 times 24 times 10 ^ {9} приблизительно 45850 { text {ns}}}
То есть часы спутников ускоряются на 45 850 наносекунд в день из-за эффектов общей теории относительности. Эти эффекты суммируются, чтобы получить (округлено до 10 нс):
- 45850 — 7210 = 38640 нс
Следовательно, часы спутников ускоряются примерно на 38 640 наносекунд в день или 38,6 мкс в день в сумме за счет эффектов относительности.
Чтобы компенсировать это усиление, частота часов GPS должна быть уменьшена на дробную часть:
- 5,307 × 10 — 8,349 × 10 = 4,472 × 10
Эта дробь вычитается из 1 и умноженное на предварительно настроенную тактовую частоту 10,23 МГц:
- (1 — 4,472 × 10) × 10,23 = 10,22999999543
То есть нам нужно замедлить тактовую частоту с 10,23 МГц до 10,22999999543 МГц, чтобы свести на нет эффекты относительности.
Искажение Саньяка
Обработка данных GPS-наблюдений также должна компенсировать эффект Саньяка. Шкала времени GPS определяется в инерциальной системе, но наблюдения обрабатываются в системе с центром на Земле , фиксированной на Земле (вращение в одном направлении), в системе, в которой согласовность не определена однозначно. Таким образом, для преобразования системы инерциальной системы в ECEF используется преобразование координат. Полученная поправка времени прохождения сигнала имеет противоположные алгебраические знаки для спутникового в Восточном и Западном небесных полушариях. Игнорирование этого эффекта приведет к ошибке восток-запад порядка сотен наносекунд или десятков метров в позиции.
Естественные источники помех
Сигналы GPS на наземных приемниках имеют тенденцию быть слабыми, естественными радиосигналами или рассеяние сигналов. GPS может снизить чувствительность приемника, получение и отслеживание спутниковых сигналов трудным или невозможным.
Космическая погода плохо работает двумя способами: прямые помехи из-за всплесков шума солнечного радио в той же полосе частот или рассеяние радиосигналы GPS в ионосферных неоднородностях, называемых сцинтилляциями. Обе формы деградации следуют 11-летнему солнечному циклу и достигают максимума при максимуме солнечного пятен, хотя могут произойти в любое время. Солнечные радиовсплески связаны с солнечными вспышками и выбросами корональной массы (CME), и их влияние может повлиять на прием на половину Земли, обращенной к Солнцу. Сцинтилляция чаще всего в тропических широтах, где это ночное явление возникает. Это происходит реже в высоких или средних широтах, где магнитные бури приводить к сцинтилляциям. Помимо мерцания, магнитные бури могут создавать сильные ионосферные градиенты, снижающие точность систем SBAS.
Искусственные источники помех
В автомобильных GPS-приемниках металлические элементы на лобовых стеклах, например, в дефростерах, или пленках для тонировки автомобильных стекол может действовать как клетка Фарадея, ухудшающаяся качество приема сигнала внутри автомобиля.
Искусственные EMI (электромагнитные помехи) также могут нарушать или заглушать сигналы GPS. В одном случае невозможно было принять сигналы GPS для всей гавани Мосс-Лендинг, Калифорния из-за непреднамеренных помех, вызванных неисправностью предварительных усилителей телевизионной антенны. Также возможно преднамеренное заклинивание. Как правило, более сильные сигналы могут создавать помехи для приемников GPS, когда они находятся в пределах радиосвязи или в пределах прямого видимости. В 2002 году подробное описание того, как построить глушитель GPS L1 C / A ближнего действия, было опубликовано в онлайн-журнале Phrack.
The U.S. Правительство считает, что такие глушители времени использовались во время войны в Афганистане, а военные США заявляют, что уничтожили глушителей GPS во время войны в Ираке, в том числе один, который был уничтожен с бомбой с GPS-наведением. Глушитель GPS относительно легко определяет его местонахождение, делает его привлекательной целью для противорадиационных ракет. 7 и 8 июня 2007 г. Министерство обороны Великобритании провело испытания системы глушения в западной части Великобритании.
В некоторых странах разрешено использование ретрансляторов GPS для приема сигналов GPS в помещениях и в темных местах; в то время как в других странах это запрещено, поскольку ретранслируемые сигналы могут вызывать многолучевые помехи для других приемников GPS, которые получают данные как от спутников GPS, так и от ретранслятора. В Великобритании Ofcom теперь разрешает использование повторителей GPS / GNSS в рамках режима «облегченного лицензирования».
Из-за возможности возникновения как естественного, так и искусственного шума, продолжают развиваться многочисленные методы устранения помех. Первое — не полагаться на GPS как на единственный источник. По словам Джона Рули, «пилоты IFR должны иметь запасной план на случай сбоя GPS». Автономный мониторинг целостности приемника (RAIM) — это функция, включенная в некоторые приемники, предназначенная для предупреждать пользователя при обнаружении заедания или другой проблемы. С 2004 года военные США также развернули свой модуль выборочной доступности / защиты от спуфинга (SAASM) в составе усовершенствованного GPS-приемника обороны (DAGR). В демонстрационных видеороликах было показано, что DAGR обнаруживает помехи и сохраняет свою блокировку на зашифрованных сигналах GPS во время помех, из-за которых гражданские приемники теряют захват.
См. Также
- Дополнение GPS
Примечания
Ссылки
- Grewal, Mohinder S.; Вайль, Лоуренс Рэндольф; Эндрюс, Ангус П. (2001). Глобальные системы позиционирования, инерциальная навигация и интеграция. Джон Уайли и сыновья. ISBN 978-0-47135-032-3.
- Паркинсон; Спилкер (1996). Глобальная система позиционирования. Американский институт аэронавтики и астрономии. ISBN 978-1-56347-106-3.
- Уэбб, Стивен (2004). Из этого мира: сталкивающиеся вселенные, браны, струны и другие дикие идеи современной физики. Springer. ISBN 0-387-02930-3. Проверено 16 августа 2013 г.
Внешние ссылки
- GPS.gov — веб-сайтом общего образования, созданным правительством США
- Стандарт производительности GPS SPS — официальная спецификация стандартной службы определения местоположения (версия 2008 года).
- Стандарт производительности GPS SPS — официальная спецификация стандартной службы определения местоположения (версия 2001 года).
19.02.2021
Глава 4 — Источники ошибок ГНСС
В главе 2 мы представили концепцию источников ошибок ГНСС. Это факторы, которые затрудняют определение точного положения ГНСС приемника. В этой главе мы более подробно рассмотрим источники этих ошибок.
Таблица 13: Источники ошибок ГНСС

Источники ошибок
Спутниковые часы
Атомные часы на спутниках ГНСС очень точны, но они немного дрейфуют. К сожалению, небольшая неточность спутниковых часов приводит к значительной ошибке в определении приемником своего местоположения. Например, ошибка часов в 10(−6) сек приводит к ошибке положения в 3 м.
Часы на спутнике контролируются наземной системой управления ГНСС и сравниваются с еще более точными часами, используемыми в ней. В данных, передаваемых спутником пользователю, содержится оценка смещения бортовых часов. Обычно передаваемая точность составляет ± 2 м, хотя она может варьироваться в зависимости от разных систем ГНСС. Чтобы получить свое более точное местоположение, ГНСС приемник должен компенсировать ошибку часов.
Одним из способов компенсации погрешности часов является загрузка точной информации о часах спутника из систем дифференциальной коррекции (SBAS) или систем точного позиционирования (PPP). В передаваемой информации содержатся поправки за ошибки бортовых часов, которые были рассчитаны системами SBAS или PPP. Более подробные сведения о системах SBAS и PPP представлены в главе 5.
Другой способ компенсации погрешности часов — настроить приемник для работы в режиме дифференциальной коррекции или кинематики реального времени (RTK). В главе 5 также подробно рассматриваются дифференциальные методы ГНСС и RTK.
Ошибки эфемерид
Спутники ГНСС движутся по очень точным, хорошо известным орбитам. Однако, параметры орбиты немного меняются. Также, как и в случае с часами спутника, небольшое изменение орбиты приводит к значительной ошибке в вычисленном положении приемника.
Наземная система управления ГНСС постоянно отслеживает орбиты спутников. Когда орбита спутника изменяется, наземная система управления отправляет поправку на спутники, и эфемериды спутников обновляются. Даже с поправками, внесенными наземной системой управления ГНСС, все еще есть небольшие ошибки в параметрах орбиты, которые могут привести к ошибке местоположения до ± 2.5 м.
Одним из способов компенсации ошибок спутниковых орбит является загрузка точной эфемеридной информации из систем SBAS или PPP, которые будут более подробно рассматриваться в главе 5.
Другой способ компенсации ошибок спутниковой орбиты — использование приемника в режиме дифференциальной коррекции или RTK. Более подробная эта информация также представлена в главе 5.
Ионосферные задержки
Ионосфера — это слой атмосферы на высоте от 80 до 600 км над Землей. Этот слой содержит электрически заряженные частицы, называемые ионами. Эти ионы задерживают прохождение спутниковых сигналов и могут вызвать значительную ошибку определения местоположения спутника (обычно ± 5 м, но эта ошибка может возрастать в периоды высокой ионосферной активности, вызванной влиянием Солнца).
Ионосферная задержка зависит от солнечной активности, времени года, сезона, времени суток и места. В результате очень трудно предсказать, насколько ионосферная задержка повлияет на расчетное местоположение.
Ионосферная задержка также изменяется в зависимости от частоты радиосигнала, проходящего через ионосферу. ГНСС приемники, которые принимают более одной частоты, например L1 и L2, могут использовать это для повышения точности. Сравнивая измерения на L1 с измерениями на L2, приемник может определить величину ионосферной задержки и удалить эту ошибку из рассчитанных координат.
Для приемников, которые могут отслеживать только одну частоту ГНСС, используются модели ионосферы для уменьшения влияния ошибок, вызванных влиянием ионосферы. Из-за различного характера ионосферной задержки модели не так эффективны, как использование нескольких частот для их устранения.
Ионосферные условия очень похожи в пределах отдельной области, поэтому спутниковые сигналы, поступающие на приемники базовой станции и подвижные приемники, имеют очень похожую задержку. Это позволяет компенсировать ионосферную задержку дифференциальными методами ГНСС и RTK.
Тропосферные задержки
Тропосфера — это ближайший к поверхности Земли слой атмосферы.

Рис. 37
Вариации задержки в тропосфере вызываются изменением влажности, температуры и атмосферного давления.
Поскольку тропосферные условия в пределах отдельной зоны очень похожи, то базовая станция и приемники подвижного приемника испытывают очень похожее влияние тропосферы. Это позволяет дифференциальным методам ГНСС и RTK компенсировать тропосферную задержку.
Приемники ГНСС также могут использовать тропосферные модели для оценки количества ошибок, вызванных тропосферной задержкой.
Собственные шумы приемника
Шум приемника добавляет к ошибке положения величины, вызванные аппаратным и программным обеспечением. Приемники ГНСС высшего класса, как правило, имеют меньшие ошибки из-за собственного шума, чем более дешевые приемники.
Влияние многолучевости
Как показано на рис. 38 многолучевое распространение происходит, когда сигнал от спутника ГНСС отражается от объекта, например, стены здания, а затем приходит к антенне приемника. Поскольку отраженный сигнал распространяется дольше, то он поступает в приемник с небольшой задержкой. Этот задержанный сигнал может привести к тому, что приемник вычислит неправильное положение.

Рис. 38
Самый простой способ уменьшить ошибки из-за многолучевого распространения это разместить ГНСС антенну в месте, удаленном от отражающих поверхностей. Когда это невозможно, приемник и антенна ГНСС должны уметь обрабатывать многолучевые сигналы.
Ошибки многолучевого распространения с большой задержкой обычно обрабатываются ГНСС приемником, а ошибки сигнала с короткой задержкой отрабатываются антенной. Благодаря применению дополнительных технологий, высокопроизводительные приемники и ГНСС антенны, как правило, лучше устраняют ошибки многолучевости.
Заключение
В этой главе описаны источники ошибок, которые вызывают погрешности при расчете позиции. В главе 5 мы опишем методы, которые используют приемники ГНСС для уменьшения этих ошибок и получения более точного местоположения.
Материалы взяты с сайта компании NovAtel. Ссылка на первоисточник: https://novatel.com/an-introduction-to-gnss
При приеме сигналов
от пяти или большего количества спутников
определение положения аппаратуры
потребителя может обеспечиваться со
значительной избыточностью, что допускает
обнаружение недопустимых сигналов и
использование данных от спутников с
лучшим расположением.
Однако
некоторые источники ошибок, возникающих
при работе GPS, являются трудно устранимыми.
Задержки
распространения сигнала в ионосфере и
тропосфере.
Описанный выше алгоритм предполагает,
что сигнал распространяется с непрерывной
скоростью, которая равна скорости света.
Однако в реальности скорость света
является константой только в вакууме.
Когда сигнал проходит через ионосферу
(слой заряженных частиц на высоте
130 – 290
км) и тропосферу (от
8 до 13 км от поверхности Земли),
его скорость распространения уменьшается,
что приводит к ошибкам в измерении
дальности. В современных GPS приёмниках
используют различные алгоритмы (модели)
для минимизации влияния этих задержек.
Однако, используемые
в настоящее время модели могут устранить
только половину из возможной 70 нс
задержки, что приводит к значительным
(до 10 м) ошибкам в определении
местоположения приемника.
Ошибки спутниковых
часов,
неисправленные сегментом управления,
могут приводить к ошибкам положения
приемника порядка одного метра.
Ошибки в
эфемеридных данных
обычно
незначительны и тщательно отслеживаются
со станций слежения, однако также могут
приводить ошибкам в положении аппаратуры
потребителя порядка 1 м.
Многолучевая
интерференция
также вносит ошибки в определение
местоположения с помощью GPS. Это
происходит, когда сигнал отражается от
объектов, расположенных на земной
поверхности, что создаёт заметную
интерференцию с сигналами приходящими
непосредственно со спутников. Специальная
техника обработки сигнала и продуманная
конструкция антенн позволяет свести к
минимуму этот источник ошибок. Однако
при работе в городских условиях ошибки,
вносимые многолучевой интерференцией,
могут осложнить производство работ.
Оценочное снижение точности в положении
приемника из-за этого явления – порядка
0,5 м.
До 1
мая 2000 года министерство обороны США
использовало искусственное
снижение точности
спутникового сигнала для гражданских
и неавторизированных пользователей –
избирательный доступ (Selective Availability или
S/A). Это приводило к тому, что точность
полученных
координат с
помощью C/A-кода
(30 метров) преднамеренно
снижалась до 100 метров. Однако по решению
президента США «Избирательный Доступ»
был отключен. Кроме того, S/A можно
исключить, применяя технику дифференциальной
коррекции.
Шум и систематические
ошибки смещения, объединяясь, приводят
к типичным ошибкам расстояния около
пятнадцати метров для каждого из
спутников.
Геометрический
фактор –
геометрическое понижение точности GDOP
(Geometric Dilution of Precision)
Ошибки GPS изменяются
в зависимости от взаимного расположения
спутников, используемых в навигационном
решении, и приемника. Объем фигуры,
описанной единичными векторами от
приемника до спутников, используемых
в навигационном решении, обратно
пропорционален параметру GDOP.
Плохой GDOP (большое
значение) – углы от приемника до множества
используемых спутников одинаковы (рис.
17).
|
|
|
|
Рис.
а б |
GDOP
вычисляется из геометрических связей
между положением приемника и положениями
спутников, которые приемник использует
для навигации, с использованием параметров
из процесса навигационного решения.
Ошибки дальностей до спутников умножаются
на соответствующий коэффициент GDOP для
оценки положения или ошибки времени.
Соседние файлы в папке геодезия
- #
- #
- #
- #
- #
- #
- #
- #
- #
Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
| C/A
|
±6.7 |
| P(Y)
|
±6.0 |
Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
The standard deviation of the error in estimated receiver position
The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
The theory of relativity introduces several effects that need to be taken into account when dealing with precise time measurements. According to special relativity, time passes differently for objects in relative motion. That is known as kinetic time dilation: in an inertial reference frame, the faster an object moves, the slower its time appears to pass
(as measured by the frame’s clocks). General relativity takes into account also the effects that gravity has on the passage of time. In the context of GPS the most prominent correction introduced by general relativity is gravitational time dilation: the clocks located deeper in the gravitational potential well (i.e. closer to the attracting body) appear to tick slower.
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
Special relativity[edit]
Special relativity predicts that as the velocity of an object increases (in a given frame), its time slows down (as measured in that frame). For instance, the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary clocks by a factor of
General relativity[edit]
Special relativity allows the comparison of clocks only in a flat spacetime, which neglects gravitational effects on the passage of time. According to general relativity, the presence of gravitating bodies (like Earth) curves spacetime, which makes comparing clocks not as straightforward as in special relativity. However, one can often account for most of the discrepancy by the introduction of gravitational time dilation, the slowing down of time near gravitating bodies. In case of the GPS, the receivers are closer to Earth than the satellites, causing the locks at the altitude of the satellite to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development some believed that GPS would not be affected by general relativistic effects, but the Hafele–Keating experiment showed that it would be.
Combined kinetic and gravitational time dilations[edit]
Combined, these sources of time dilation cause the clocks on the satellites to gain 38.6 microseconds per day relative to the clocks on the ground. This is a difference of 4.465 parts in 1010.[13] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[14] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[15] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[16] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[17]
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to the satellite’s velocity and altitude, and add them together.
Kinetic time dilation[edit]
The amount due to velocity is determined using the Lorentz transformation. The time measured by an object moving with velocity 
For small values of v/c this approximates to:
The GPS satellites move at 3874 m/s relative to Earth’s center.[15] We thus determine:
This difference of 8.349×10−11 represents the fraction by which the satellites’ clocks tick slower than the stationary clocks. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks are slower than Earth’s clocks by 7214 nanoseconds a day due to their velocity.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[18] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
Gravitational time dilation[edit]
The amount of dilation due to gravity is determined using the gravitational time dilation equation:

where 


For small values of 

Determine the difference 



Earth has a radius of 6,357 km (at the poles) making 


This represents the fraction by which the clocks at satellites’ altitude tick faster than on the surface of the Earth. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks gain 45850 nanoseconds a day due to gravitational time dilation.
Combined time dilation effects[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativistic effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both time dilation effects.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[19]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[20] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[21] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[22] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[23] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[24]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[25] such as defrosters, or car window tinting films[26] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[27][28] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[29]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[30] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[31] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[32] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[33] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W. «Real-World Relativity: The GPS Navigation System». Retrieved 2008-01-25.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Archived from the original on 2014-07-03. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
Концепция художника о спутнике GPS Block II-F на орбите
Анализ ошибок для Глобальная система позиционирования важна для понимания того, как работает GPS, и для понимания величины ожидаемых ошибок. GPS вносит поправки на ошибки часов, приемника и другие эффекты, но остаются остаточные ошибки, которые не исправляются. Положение приемника GPS вычисляется на основе данных, полученных со спутников. Ошибки влияния от геометрического снижения точности и показателей, перечисленных в таблице ниже.
Содержание
- 1 Обзор
- 2 Измерение времени прихода сигнала
- 3 Атмосферные эффекты
- 4 Многолучевые эффекты
- 5 Эфемериды и ошибки часов
- 6 Геометрическое снижение точности вычислений (GDOP)
- 6.1 Вычисление геометрического снижения точности
- 6.2 Вывод расчетов геометрического снижения точности
- 7 Выборочная доступность
- 8 Антиспуфинг
- 9 Относительность
- 9.1 Специальная и общая теория относительности
- 9.2 Расчет замедления времени
- 9.3 Искажение Саньяка
- 10 Естественные источники помех
- 11 Искусственные источники помех
- 12 См.
- 13 Примечания
- 14 Ссылки
- 15 Внешние ссылки
Обзор
| Источник | Эффект (м) |
|---|---|
| Поступление сигнал C / A | ± 3 |
| Сигнал приход P (Y) | ± 0,3 |
| Ионосферные эффекты | ± 5 |
| Погрешности эфемерид | ± 2,5 |
| Ошибки спутниковых часов | ± 2 |
| Многолучевое искажение | ± 1 |
| Troposp Герические эффекты | ± 0, 5 |
| 3 σ R { Displaystyle 3 sigma _ {R}}C / A |
± 6,7 |
| 3 σ R { Displaystyle 3 sigma _ {R}}P (Y) |
± 6.0 |
Диаграмма геометрических погрешностей, показывающая типичное соотношение положения приемника, пересечение сфер, и истинное положение приемника с точки зрения ошибок, PDOP и числовых ошибок
Ошибки эквивалентного диапазона пользователя (UERE) показаны в таблице. Существует также числовая ошибка с точной величиной σ n u m { displaystyle sigma _ {num}}
Термин «ошибка эквивалентного диапазона пользователя» (UERE) относится к компоненту на расстоянии от приемника до спутника. Эти ошибки UER представляют собой ошибки как ±, что они представляют собой несмещенными или нулевыми средними средними. Поэтому эти ошибки UERE используются при вычислении стандартных отклонений. Стандартное отклонение ошибки в положении приемника, σ rc { displaystyle sigma _ {rc}}
PDOP вычисляется как функция положения приемника и спутника. Подробное описание того, как рассчитать PDOP, приведено в разделе Геометрическое снижение точности вычислений (GDOP).
σ R { displaystyle sigma _ {R}}
- 3 σ R = 3 2 + 5 2 + 2,5 2 + 2 2 + 1 2 + 0,5 2 m = 6,7 m { displaystyle 3 sigma _ {R} = { sqrt { 3 ^ {2} + 5 ^ {2} + 2.5 ^ {2} + 2 ^ {2} + 1 ^ {2} + 0.5 ^ {2}}} , mathrm {m} , = , 6.7 , mathrm {m}}
Стандартное отклонение ошибки в расчетном положении приемника σ rc { displaystyle sigma _ {rc}}
- σ rc = PDOP 2 × σ R 2 + σ число 2 = PDOP 2 × 2,2 2 + 1 2 м { displaystyle sigma _ {rc} = { sqrt {PDOP ^ {2} times sigma _ {R} ^ {2} + sigma _ {num} ^ {2}}} = { sqrt {PDOP ^ {2} times 2.2 ^ {2} + 1 ^ {2}}} , mathrm {m}
Диаграмма ошибок слева показывает положение положения приемника, истинного положения приемника и пересечения четырех поверхностей.
Измерение времени прихода сигнала
Для определения местоположения, вычисляемого приемником GPS, требуется текущее время, местоположение спутника и измеренная задержка принятого сигнала. Точность определения местоположения в первую очередь зависит от местоположения спутника и задержки сигнала.
Чтобы измерить задержку, приемник сравнивает битовую последовательность, полученную от спутника, с версией, созданной внутри. Сравнивая передний и задний фронты битовых переходов, современная электроника может измерять смещение сигнала с точностью до одного процента от ширины битового импульса, 0,01 × 300, 000, 000 м / с (1,023 × 10 6 / с). { displaystyle { frac {0,01 times 300000000 м / с} {(1.023 times 10 ^ {6} / mathrm {s})}}}
Этот компонент точности положения может быть улучшен в 10 раз, используя сигнал P (Y) с более высокой чиповой скоростью. Предполагаемая тот же самый процент точности ширины битового импульса, высокочастотный сигнал P (Y) дает точность (0,01 × 300, 000, 000 м / с) (10,23 × 10 6 / с) { displaystyle { frac {(0,01 times 300000000 mathrm {m / s})} {(10.23 times 10 ^ {6} / mathrm {s})}}}
Атмосферные эффекты
Несогласованность атмосферных условий влияет на скорость сигналов GPS, когда они проходят через атмосферу Земли, особенно ионосферу. Исправление этих ошибок является серьезной проблемой для повышения точности определения местоположения GPS. Эти эффекты минимальны, когда спутник находится прямо над головой, когда спутник находится прямо над головой, и сильнее для спутников, спутников к горизонту, благодаря пути через атмосферу длиннее (см. воздушная масса ). Как только приблизительное местоположение приемника известно, можно использовать математическую модель для оценки и компенсации этих ошибок.
Ионосферная задержка микроволнового сигнала зависит от его частоты. Он возникает из ионизированной атмосферы (см. Содержание электронов ). Это явление известно как дисперсия и может быть вычислено на основе измерений задержек для двух или более полос частот, что позволяет использовать задержки на других частотах. Некоторые военные и дорогие гражданские приемники исследовательского класса атмосферную дисперсию на различных задержек на частотах L1 и L2 и применяют более точную поправку. Это может быть сделано в гражданских приемниках без дешифрования P (Y), передаваемого по L2 путем использования несущей вместо модулированного кода. Чтобы облегчить это на более дешевых приемниках, новый гражданский кодовый сигнал на L2, названный L2C, был добавлен к спутникам Block IIR-M, которые впервые были запущены в 2005 году. Он позволяет прямое сравнение сигналов L1 и L2 с использованием кодированных сигнал вместо несущей.
Воздействие ионосферы обычно изменяется медленно и может быть усреднено по времени. Эти значения для географической области можно легко вычислить, сравнив положение, измеренное с помощью GPS, с местом расположения. Эта поправка также действительна для других приемников в том же месте. Некоторые системы отправляют эту информацию по радио или другим каналам, чтобы приемники, работающие только на L1, могли вносить ионосферные поправки. Ионосферные данные передаются через спутник в спутниковых системах расширения (SBAS), таких как Wide Area Augmentation System (WAAS) (доступна в Северной Америке и на Гавайях), EGNOS (Европа и Азия), Многофункциональная спутниковая система дополнения (MSAS) (Япония) и GPS Aided Geo Augmented Navigation (GAGAN) (Индия), которая передает данные на GPS с использованием Специальная псевдослучайной шумовой псевовой последовательности (PRN), поэтому требуются только один приемник и антенна.
Влажность вызывает переменную задержку, приводящую к ошибкам, аналогичным ионосферной задержке, но вызывающим в тропосфере. Этот эффект более локализован, чем ионосферные эффекты, изменяется быстрее и не зависит от частоты. Эти характеристики делают измерение и компенсацию выбросов более сложными, чем ионосферные эффекты.
Атмосферное давление также может задержку приема сигналов из-за присутствия сухих газов в тропосфере (78% N2, 21% O2, 0,9% Ar…). Его влияние меняется в зависимости от местной температуры и атмосферного давления, вполне предсказуемым образом с использованием идеальных газов.
Эффекты многолучевого распространения
На сигналы GPS также может влиять многолучевость проблемы, при которых радиосигналы отражаются от окружающей местности; здания, стены каньона, твердый грунт и т. д. Эти задержанные сигналы ошибки измерения, которые различны для каждого типа сигнала GPS из-за его зависимости от длины волны.
Разнообразие методов, в первую очередь узкое расстояние между корреляторами, были разработаны для уменьшения ошибок, связанных с многолучевым распространением. При многолучевом распространении с большой задержкой приемник сам может распознать попутный сигнал и отбросить его. Для решения проблемы многолучевого распространения с более короткой задержкой сигнала, отражающегося от земли, местные антенны (например, кольцевая антенна ) для уменьшения мощности сигнала, принимаемой антенной. Отражения с короткой задержкой труднее отфильтровать, потому что они мешают истинному сигналу, вызывая эффекты, почти неотличимые от обычных атмосферных атмосферных явлений.
Эффекты многолучевого распространения менее серьезны для движущихся транспортных средств. Когда антенна GPS сходится, ложные решения с использованием отраженных сигналов быстро не идут, и только прямые сигналы приводят к стабильным решениям.
Ошибки эфемерид и часов
Хотя данные эфемерид передаются каждые 30 секунд, сама информация может быть старше двух часов. Изменчивость давления солнечной радиации влияет на точность GPS из-за влияния на ошибки эфемерид. Если требуется быстрое время для первого исправления (TTFF), можно загрузить действительные эфемериды в приемник, и в дополнение к установке времени определения местоположения может быть получено чем за десять секунд. Такие эфемеридные данные можно связать в Интернете, чтобы их можно было загрузить в мобильное устройство GPS. См. Также Assisted GPS.
Атомные часы спутников испытывают шум и ошибки дрейфа часов. В навигационном сообщении исправления этих ошибок и точности плохих часов. Однако они основаны на наблюдениях и могут указывать на текущее состояние часов.
Эти проблемы, как правило, очень маленькие, но могут составлять несколько метров (десятков футов) неточности.
Для очень точного позиционирования (например, в геодезии ) эти эффекты могут быть устранены с помощью дифференциальной GPS : одновременного использования двух или более приемников в нескольких точках съемки. В 1990-х годах, когда были разработаны некоторые методы квазидифференциальной системы GPS, использовались некоторые приемники, которые использовались только один приемник, но повторно использовались точки измерения. В Венском техническом университете метод получил название qGPS, и было разработано программное обеспечение для постобработки.
Геометрическое снижение точности вычислений (GDOP)
Вычисление геометрического снижения точности
Концепция геометрического снижения точности было введено в раздел, источники ошибок и анализ. Были предоставлены расчеты, чтобы показать, как использовался PDOP и как он влиял на стандартное отклонение ошибки местоположения приемника.
Когда видимые спутники GPS расположены близко друг к другу в небе (т. Е. С небольшим угловым разделением), значения DOP высокие; когда они далеко друг от друга, значения DOP низкие. Предусмотрено, что предоставлены предоставленные близко друг к другу спутники, которые находятся на большом расстоянии друг от друга. Низкие значения DOP обеспечивает лучшую точность позиционирования GPS из-за более широкого углового разнесения между спутниками, используемыми для расчета положения приемника GPS. HDOP, VDOP, PDOP и TDOP — это соответственно по горизонтали, вертикали, позиции (3-D) и временного снижения точности.
Рис. 3.1 Снижение точности данных Navstar GPS от береговой охраны США обеспечивает представление о том, как геометрия влияет на точность.
Теперь мы беремся за задачу, как вычислить снижение точности термины. В качестве первого шага в вычислении DOP рассмотрим единый вектор от приемника к спутнику я с компонентами (xi — x) R i { displaystyle { frac {(x_ {i} -x)} {R_ {i}}} }
- R i = (xi — x) 2 + (yi — y) 2 + (zi — z) 2 { displaystyle R_ {i} , = , { sqrt {(x_ {i} -x) ^ {2} + (y_ {i} -y) ^ {2} + (z_ {i} -z) ^ {2}}}}
где x, y, { displaystyle x, y,}
- A = [(x 1 — x) R 1 (y 1 — y) R 1 (z 1 — z) R 1 1 (x 2 — x) R 2 (y 2 — y) К 2 (z 2 — z) R 2 1 (x 3 — x) R 3 (y 3 — y) R 3 (z 3 — z) R 3 1 (x 4 — x) R 4 (y 4 — y).) R 4 (z 4 — z) R 4 1] { displaystyle A = { begin {bmatrix} { frac {(x_ {1} -x)} {R_ {1}}} { frac {( y_ {1} -y)} {R_ {1}}} { frac {(z_ {1} -z)} {R_ {1}}} 1 \ { frac {(x_ {2} — x)} {R_ {2}}} { frac {(y_ {2} -y)} {R_ {2}}} и { frac {(z_ {2} -z)} {R_ {2} }} 1 \ { frac {(x_ {3} -x)} {R_ {3}}} { frac {(y_ {3} -y)} {R_ {3}}} и { frac {(z_ {3} -z)} {R_ {3}}} 1 \ { frac {(x_ {4} -x)} {R_ {4}}} { frac {(y_ { 4} — y)} {R_ {4}}} { frac {(z_ {4} -z)} {R_ {4}}} 1 end {bmatrix}}}
Первые три элемента каждого A — компоненты единичного вектора от приемника до спутника. Элементами в четвертом столбце являются c, где c обозначает скорость света. Сформулируйте матрицу Q в виде
- Q = (ATA) — 1 { displaystyle Q = left (A ^ {T} A right) ^ {- 1}}
Это вычисление выполняется в соответствии с главой 11 Глобальной системы позиционирования Паркинсона и Спилкера, где весовая матрица P установлена равной единичной матрице. Элементы матрицы Q обозначаются как:
- Q = [dx 2 dxy 2 dxz 2 dxt 2 dxy 2 dy 2 dyz 2 dyt 2 dxz 2 dyz 2 dz 2 dzt 2 dxt 2 dyt 2 dzt 2 dt 2] { displaystyle Q = { begin {bmatrix} d_ {x} ^ {2} d_ {xy} ^ {2} d_ {xz} ^ {2} d_ {xt} ^ {2} \ d_ {xy} ^ {2 } d_ {y} ^ {2} d_ {yz} ^ {2} d_ {yt} ^ {2} \ d_ {xz} ^ {2} d_ {yz} ^ {2} d_ { z} ^ {2} d_ {zt} ^ {2} \ d_ {xt} ^ {2} d_ {yt} ^ {2} d_ {zt} ^ {2} d_ {t} ^ { 2} end {bmatrix}}}
Греческая буква σ { displaystyle sigma}
- P D O P = d x 2 + d y 2 + d z 2 T D O P = d t 2 = | д т | GDOP = PDOP 2 + TDOP 2 { displaystyle { begin {align} PDOP = { sqrt {d_ {x} ^ {2} + d_ {y} ^ {2} + d_ {z} ^ {2}} } \ TDOP = { sqrt {d_ {t} ^ {2}}} = | d_ {t} | \ GDOP = { sqrt {PDOP ^ {2} + TDOP ^ {2}}} end {выровнено}}
в соответствии с «Разделом 1.4.9 ПРИНЦИПОВ РАЗМЕЩЕНИЯ СПУТНИКОВ».
Горизонтальное снижение точности, HDOP = dx 2 + dy 2 { displaystyle HDOP = { sqrt {d_ {x} ^ {2} + d_ {y} ^ {2}}}}
Вывод для сравнения геометрического снижения точности
Уравнения для геометрического снижения точности были в предыдущем разделе. В этом разделе описывается вывод этих соотношений. Используемый здесь метод аналогичен методу, использованному в «Глобальная система позиционирования (предварительный просмотр) Паркинсона и Спайкера»
Рассмотрим вектор ошибки положения, e { displaystyle mathbf {e}}
- A [exeyezet] = [(x 1 — x) R 1 (y 1 — y) R 1 (z 1 — z) R 1 1 (x 2 — x) R 2 (y 2 — y) R 2 (z 2 — z) R 2 1 (x 3 — x) R 3 (y 3 — y) R 3 (z 3 — z) R 3 1 (x 4 — x) R 4 (y 4 — y) R 4 (z 4 — z) R 4 1] [exeyezet] = [e 1 e 2 e 3 e 4] (1) { displaystyle A { begin {bmatrix} e_ {x} \ e_ {y} \ e_ {z} \ e_ {t} end {bmatrix}} = { begin {bmatrix} { frac {(x_ {1} -x)} {R_ {1}}} { frac {(y_ { 1} -y)} {R_ {1}}} { frac {(z_ {1} -z)} {R_ {1}}} 1 \ { frac {(x_ {2} -x)} {R_ {2}}} { frac {(y_ {2} -y)} {R_ {2}}} и { frac {(z_ {2} -z)} {R_ {2}}} 1 \ { frac {(x_ {3} -x)} {R_ {3}}} { frac {(y_ {3} -y)} {R_ {3}}} { frac {(z_ {3} -z)} {R_ {3}}} 1 \ { frac {(x_ {4} -x)} {R_ {4}}} { frac {(y_ {4} -y) } {R_ {4}}} { frac {(z_ {4} -z)} {R_ {4}}} 1 end {bmatrix}} { begin {bmatrix} e_ {x} \ e_ { y} \ e_ {z} \ e_ {t} end {bmatrix}} = { begin {bmatrix} e_ {1} \ e_ {2} \ e_ {3} \ e_ {4} конец {bmatrix}} (1)}
где е 1 { displaystyle e_ {1}}
- [exeyezet] = A — 1 [e 1 e 2 e 3 e 4] (2) { Displaystyle { begin {bmatrix} e_ {x} \ e_ {y} \ e_ {z} \ e_ {t} end {bmatrix}} = A ^ {- 1} { begin {bmatrix} e_ {1} \ e_ {2} \ e_ {3} \ e_ {4} end {bmatrix}} (2)}
Перемещение сторон:
- [exeyezet] = [e 1 e 2 e 3 e 4] (A — 1) T (3) { displaystyle { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} = { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bmatrix}} left (A ^ {- 1} right) ^ {T} ( 3)}
После умножения матриц с обеих сторон уравнения (2) на соответствующие матрицы в уравнении (3) accept
- [exeyezet] [exeyezet] = A — 1 [e 1 e 2 e 3 e 4] [e 1 е 2 е 3 е 4] (A — 1) T (4) { displaystyle { begin {bmatrix} e_ {x} \ e_ {y} \ e_ {z} \ e_ {t} end {bmatrix}} { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ {t} end {bmatrix}} = A ^ {- 1} { begin {bmatrix} e_ { 1} e_ {2} \ e_ {3} \ e_ {4} end {bmatrix}} { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bma trix}} left (A ^ { — 1} right) ^ {T} (4)}
Взяв ожидаемое значение с обеих сторон и взяв неслучайные матрицы за пределами оператора ожидания, E, получаем результат:
- E ([exeyezet] [exeyezet]) Знак равно A — 1 E ([e 1 e 2 e 3 e 4] [e 1 e 2 e 3 e 4]) (A — 1) T (5) { Displaystyle E left ({ begin {bmatrix} e_ {x} \ e_ {y} \ e_ {z} \ e_ {t} end {bmatrix}} { begin {bmatrix} e_ {x} e_ {y} e_ {z} e_ { t} end {bmatrix}} right) = A ^ {- 1} E left ({ begin {bmatrix} e_ {1} \ e_ {2} \ e_ {3} \ e_ {4} end {bmatrix}} { begin {bmatrix} e_ {1} e_ {2} e_ {3} e_ {4} end {bmatrix}} right) left (A ^ {- 1} справа) ^ {T} (5)}
Предполагая, что ошибки псевдодальности некоррелированы и имеют одинаковую дисперсию, ковариационная матрица справа может быть выражена как скаляр, умноженный на единичную матрицу. Таким образом,
- [σ x 2 σ xy 2 σ xz 2 σ xt 2 σ xy 2 σ y 2 σ yz 2 σ yt 2 σ xz 2 σ yz 2 σ z 2 σ zt 2 σ xt 2 σ yt 2 σ zt 2 σ T 2] знак равно σ р 2 A — 1 (A — 1) T знак равно σ R 2 (ATA) — 1 (6) { displaystyle { begin {bmatrix} sigma _ {x} ^ { 2} sigma _ {xy} ^ {2} sigma _ {xz} ^ {2} sigma _ {xt} ^ {2} \ sigma _ {xy} ^ {2} sigma _ {y} ^ {2} sigma _ {yz} ^ {2} sigma _ {yt} ^ {2} \ sigma _ {xz} ^ {2} sigma _ {yz} ^ {2} sigma _ {z} ^ {2} sigma _ {zt} ^ {2} \ sigma _ {xt} ^ {2} sigma _ {yt} ^ {2} sigma _ {zt} ^ {2} sigma _ {t} ^ {2} end {bmatrix}} = sigma _ {R} ^ {2} A ^ {- 1} left (A ^ { — 1} справа) ^ {T} = sigma _ {R} ^ {2} left (A ^ {T} A right) ^ {- 1} (6)}
начиная с A — 1 (A — 1) T (ATA) = I { displaystyle A ^ {- 1} left (A ^ {- 1} right) ^ {T} left (A ^ {T} A right) = I}
Примечание: (A — 1) T = (AT) — 1, { displaystyle left (A ^ {- 1} right) ^ {T} = left (A ^ {T} right) ^ {- 1},}
Замена на (ATA) — 1 = Q { dis playstyle left (A ^ {T} A right) ^ {- 1} = Q}
- [σ x 2 σ xy 2 σ xz 2 σ xt 2 σ xy 2 σ y 2 σ yz 2 σ yt 2 σ xz 2 σ yz 2 σ z 2 σ zt 2 σ xt 2 σ yt 2 σ zt 2 σ t 2] = σ R 2 [dx 2 dxy 2 dxz 2 dxt 2 dxy 2 dy 2 dyz 2 dyt 2 dxz 2 dyz 2 dz 2 dzt 2 dxt 2 dyt 2 dzt 2 dt 2] (7) { displaystyle { begin {bmatrix} sigma _ {x} ^ {2} sigma _ {xy} ^ {2} sigma _ {xz} ^ {2} sigma _ {xt} ^ {2} \ sigma _ {xy} ^ {2} sigma _ {y} ^ {2} сигма _ {yz} ^ {2} sigma _ {yt} ^ {2} \ sigma _ {xz} ^ {2} sigma _ {yz} ^ {2} sigma _ {z} ^ {2} сигма _ {zt} ^ {2} \ sigma _ {xt} ^ {2} sigma _ {yt} ^ {2} sigma _ {zt} ^ {2} sigma _ {t} ^ {2} end {bmatrix}} = sigma _ {R} ^ {2} { begin {bmatrix} d_ {x} ^ {2} d_ {xy} ^ {2} d_ {xz} ^ {2} d_ {x t} ^ {2} \ d_ {xy} ^ {2} d_ {y} ^ {2} d_ {yz} ^ {2} d_ {yt} ^ {2} d_ {xz} ^ {2} d_ {yz} ^ {2} d_ {z} ^ {2} d_ {zt} ^ {2} \ d_ {xt} ^ {2} d_ {yt} ^ {2} d_ {zt} ^ {2} d_ {t} ^ {2} end {bmatrix}} (7)}
Из уравнения (7) следует, что отклонения положения приемника и времени
- σ rc 2 знак равно σ Икс 2 + σ Y 2 + σ Z 2 знак равно σ р 2 (dx 2 + dy 2 + dz 2) = PDOP 2 σ R 2 { Displaystyle sigma _ {rc} ^ {2} = sigma _ {x} ^ {2} + sigma _ {y} ^ {2} + sigma _ {z} ^ {2} = sigma _ {R} ^ {2} left (d_ {x} ^ { 2} + d_ {y} ^ {2} + d_ {z} ^ {2} right) = PDOP ^ {2} sigma _ {R} ^ {2}}
- σ T 2 знак равно σ р 2 dt 2 знак равно TDOP 2 σ р 2 { Displaystyle sigma _ {t} ^ {2} = sigma _ {R} ^ {2} d_ {t} ^ {2} = TDOP ^ {2} sigma _ {R} ^ {2}}
Остальные члены дисперсии ошибки положения и времени след просто.
Выборочная доступность
В GPS включена функция выборочной доступности (SA), которая первимеренные изменяющиеся во времени ошибки до 100 метров (328 футов) к общедоступным навигационным сигналом. Это было сделано с целью запретить противнику использовать гражданские приемники GPS для наведения высокоточного оружия.
Ошибки SA на самом деле являются псевдослучайными, генерируемыми криптографическим алгоритмом из секретного начального ключа, доступного только авторизованным пользователям (вооруженным силам США, их союзникам и некоторым другим пользователям, в основном правительственным) специальный военный GPS-приемник. Простого владения приемником недостаточно; ему по-прежнему нужен строго контролируемый ежедневный ключ.
Перед отключением 2 мая 2000 г. типичные ошибки SA составляли около 50 м (164 футов) по горизонтали и около 100 м (328 футов) по вертикали. SA влияет на каждый приемник. GPS в данной области, фиксированная станция с определением местоположения. Это называется дифференциальным GPS или DGPS. DGPS также исправляет несколько других важных источников ошибок GPS, в частности, ионосферную задержку, поэтому он широко распространяет, даже несмотря на то, что SA отключена. Неэффективность SA перед широко доступным DGPS была обычным аргументом в пользу отключения SA, и это было наконец сделано по приказу президента Клинтона в 2000 году.
Услуги ДГПС широко доступны из коммерческих и государственных источников. К последним войскам WAAS и США. Береговая охрана сеть морских навигационных маяков LF. Точность поправок зависит от расстояния между пользователем и приемником DGPS. По мере увеличения расстояния на двух участках не будут коррелировать, что приведет к менее точным дифференциальным поправкам.
Во время войны в Персидском заливе 1990–91 годов нехватка военных единиц GPS вынудила многих солдат и их семьи покупать легкодоступные гражданские единицы. Использовать такое решение для использования GPS.
В 1990-х годах FAA начало создания давления на военных, чтобы они навсегда отключили SA. Это позволяет бы FAA ежегодно экономить миллионы долларов на обслуживании их собственных радионавигационных систем. Количество добавленных ошибок было «обнулено» в полночь 1 мая 2000 г. после объявления президента США Билла Клинтона, разрешающего доступ к безошибочному сигналу L1. Согласно диреке, вызванная ошибка SA была изменена, чтобы не добавить ошибки к общедным сигналам (код C / A). Указ Клинтона требовал, чтобы SA была обнулена к 2006 году; это произошло в 2000 году, когда американские военные разработали новую систему, которая позволяет блокировать GPS (и другие навигационные услуги) враждебным силам в специфическом кризисе.
19 сентября 2007 года Министерство обороны США объявило, что будущие спутники GPS III не будут поддерживать SA, что в конечном итоге сделало бы постоянную.
Антиспуфинг
Остается еще одно ограничение на GPS, антиспуфинг. Это зашифровывает P-код, так что он не может быть имитирован передатчиком, отправляющим ложную информацию. Немногие гражданские приемники когда-либо использовали P-код, и точность, достигаемая с помощью общедоступного кода C / A, было намного лучше, чем ожидалось изначально (особенно с DGPS ). Настолько, что политика защиты от подделки практически не влияет на большинство гражданских пользователей. Отключение функции защиты от подделки в первую очередь услуг по геодезистам и некоторым ученым, которым требуется самое быстрое положение для экспериментов, таких как отслеживание движения тектонических плит.
Относ
Спутниковые часы замедляются из-за своей орбитальной скорости, но ускоряются из-за расстояния от гравитационного колодца Земли.
Существует ряд источников ошибок из-за релятивизма эффекты, которые сделают систему бесполезной, если ее не исправить. Три релятивистских эффекта — это замедление времени, гравитационный сдвиг частоты и эффекты эксцентриситета. Примеры включают релятивистское замедление времени из-за скорости спутника примерно 1 часть из 10, гравитационное замедление времени, из-за которого спутник движется примерно на 5 частей из 10 быстрее, чем земные часы, и эффект Саньяка из-за вращения относительно приемников на Земле. Эти темы рассматриваются ниже по очереди.
Специальная и общая теория относительности
Согласно теории относительности, из-за их постоянного движения и высоты относительно центрированной Земли, невращающейся ориентированной инерциальной системы отсчета на часы влияет их скорость. Специальная теория относительности предсказывает, что частота атомных часов, движущихся с орбитальной скоростью GPS, будет замедляться в , чем стационарные наземные часы, в v 2 2 c 2 ≈ 10-10 { displaystyle { frac {v ^ {2}} {2c ^ {2}}} приблизительно 10 ^ {- 10}}
Влияние сдвига частоты гравитации на GPS из-за общей теории относительности заключается в том, что часы расположены ближе к массивному объекту, будут медленнее, чем часы на более удаленном расстоянии. Применительно к GPS приемники находятся намного ближе к Земле, чем спутники, в результате чего часы GPS работают быстрее в 5 × 10 раз, или примерно на 45,9 мкс / день. Этот сдвиг частоты гравитации заметен.
При объединении замедления времени и гравитационного сдвига частоты расхождение составляет около 38 микросекунд в день, то есть разница в 4 465 частей на 10. Без исправления ошибок в позиции накапливаются примерно 11,4 км / день. Эта начальная ошибка псевдодальности исправляется в процессе решения навигационных уравнений. Вдобавок эллиптические, а не идеально круглые орбиты вызывают изменение во времени замедления времени и гравитационного сдвига частоты. Этот эффект эксцентриситета увеличивает или уменьшение разницы в тактовой частоте между спутником GPS и приемником в зависимости от высоты спутника.
Для компенсации несоответствия стандарту частоты на борту каждого спутника перед запуском идет сдвиг скорости, что делает его немного медленнее, чем желаемая частота на Земле; в частности, на 10,22999999543 МГц вместо 10,23 МГц. GPS-система автоматизированных часов на борту спутниковой связи. GPS точно настроена. Размещение атомных часов на искусственных спутниках для проверки общей теории Эйнштейна было предложено Фридвардтом Винтербергом в 1955 году.
Расчет количества замедления времени
Для расчета количества ежедневного замедления времени с помощью спутников GPS Земли нам нужно отдельно определить, обусловленные специальные теорией относительности (скорость) и общей теорией относительности (гравитация), и сложить их вместе.
Величина, обусловленная скоростью, будет определяться с помощью преобразования Лоренца. Это будет:
- 1 γ = 1 — v 2 c 2 { displaystyle { frac {1} { gamma}} = { sqrt {1 — { frac {v ^ {2}} {c ^ {2}}}}}}
Для малых значений v / c при использовании биномиального разложения это приближается к:
- 1 γ ≈ 1 — v 2 2 c 2 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {v ^ {2}} {2c ^ {2}}}}
Спутники GPS движутся со скоростью 3874 м / с относительно центра Земли. Таким образом, мы определяем:
- 1 γ ≈ 1 — 3874 2 2 (2,998 × 10
 2 ≈ 1 — 8,349 × 10 — 11 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {3874 ^ {2}} {2 left (2,998 times 10 ^ {8} right) ^ {2}}} приблизительно 1-8,349 times 10 ^ {- 11}}
2 ≈ 1 — 8,349 × 10 — 11 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {3874 ^ {2}} {2 left (2,998 times 10 ^ {8} right) ^ {2}}} приблизительно 1-8,349 times 10 ^ {- 11}}
Эта разница ниже 1 из 8,349 × 10 представляет собой долю, на которую часы спутников движутся медленнее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
- — 8,349 × 10 — 11 × 60 × 60 × 24 × 10 9 ≈ — 7214 нс { displaystyle -8,349 times 10 ^ {- 11} times 60 times 60 times 24 times 10 ^ {9} приблизительно -7214 { text {ns}}}
То есть часы спутников теряют 7214 наносекунд в день из-за специальной теории относительности эффекты.
- Обратите внимание, что эта скорость 3874 м / с измеряется относительно центра Земли, а не ее поверхности, где находятся приемники GPS (и пользователи). Это потому, что эквипотенциал Земли делает чистое замедление времени равным по всей ее геодезической поверхности. То есть комбинация специальных и общих эффектов делает чистое замедление времени на экваторе равным таковому у полюсов, которые, в свою очередь, находятся в покое относительно центра.. Таким образом, мы будем использовать центр в качестве опорной точки, чтобы представлять всю поверхность
Количество дилатации под действием силы тяжести будет определяться с помощью гравитационное замедление времени уравнение:
- 1 γ = 1 — 2 GM rc 2 { displaystyle { frac {1} { gamma}} = { sqrt {1 — { frac {2GM} {rc ^ {2}}}}}}
Для малых значений M / r, используя биномиальное расширение, это приближается к:
- 1 γ ≈ 1 — GM rc 2 { displaystyle { frac {1} { gamma}} приблизительно 1 — { frac {GM } {rc ^ {2}}}}
Нас снова интересует только дробь меньше 1 и разница между Землей и спутниками. Чтобы определить эту разницу, мы берем:
- Δ (1 γ) ≈ GM земля R земля c 2 — GM земля R gps c 2 { displaystyle Delta left ({ frac {1} { gamma}} right) приблизительно { frac {GM _ { text {earth}}} {R _ { text {earth}} c ^ {2}}} — { frac {GM _ { text {earth}}} {R _ { текст {gps}} c ^ {2}}}}
Земля имеет радиус 6 357 км (на полюсах), что составляет R земля = 6 357 000 м, а высота спутников составляет 20 184 км. их радиус орбиты R gps = 26 541 000 м. Подставляя их в вышеприведенное уравнение, с M земля = 5,974 × 10, G = 6,674 × 10 и c = 2,998 × 10 (все в единицах SI ), получаем:
- Δ (1 γ) ≈ 5,307 × 10–10 { displaystyle Delta left ({ frac {1} { gamma}} right) приблизительно 5,307 times 10 ^ {- 10}}
Это представляет собой долю, на которую часы спутников движутся быстрее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
- 5,307 × 10 — 10 × 60 × 60 × 24 × 10 9 ≈ 45850 нс { displaystyle 5.307 times 10 ^ {- 10} times 60 times 60 times 24 times 10 ^ {9} приблизительно 45850 { text {ns}}}
То есть часы спутников ускоряются на 45 850 наносекунд в день из-за эффектов общей теории относительности. Эти эффекты суммируются, чтобы получить (округлено до 10 нс):
- 45850 — 7210 = 38640 нс
Следовательно, часы спутников ускоряются примерно на 38 640 наносекунд в день или 38,6 мкс в день в сумме за счет эффектов относительности.
Чтобы компенсировать это усиление, частота часов GPS должна быть уменьшена на дробную часть:
- 5,307 × 10 — 8,349 × 10 = 4,472 × 10
Эта дробь вычитается из 1 и умноженное на предварительно настроенную тактовую частоту 10,23 МГц:
- (1 — 4,472 × 10) × 10,23 = 10,22999999543
То есть нам нужно замедлить тактовую частоту с 10,23 МГц до 10,22999999543 МГц, чтобы свести на нет эффекты относительности.
Искажение Саньяка
Обработка данных GPS-наблюдений также должна компенсировать эффект Саньяка. Шкала времени GPS определяется в инерциальной системе, но наблюдения обрабатываются в системе с центром на Земле , фиксированной на Земле (вращение в одном направлении), в системе, в которой согласовность не определена однозначно. Таким образом, для преобразования системы инерциальной системы в ECEF используется преобразование координат. Полученная поправка времени прохождения сигнала имеет противоположные алгебраические знаки для спутникового в Восточном и Западном небесных полушариях. Игнорирование этого эффекта приведет к ошибке восток-запад порядка сотен наносекунд или десятков метров в позиции.
Естественные источники помех
Сигналы GPS на наземных приемниках имеют тенденцию быть слабыми, естественными радиосигналами или рассеяние сигналов. GPS может снизить чувствительность приемника, получение и отслеживание спутниковых сигналов трудным или невозможным.
Космическая погода плохо работает двумя способами: прямые помехи из-за всплесков шума солнечного радио в той же полосе частот или рассеяние радиосигналы GPS в ионосферных неоднородностях, называемых сцинтилляциями. Обе формы деградации следуют 11-летнему солнечному циклу и достигают максимума при максимуме солнечного пятен, хотя могут произойти в любое время. Солнечные радиовсплески связаны с солнечными вспышками и выбросами корональной массы (CME), и их влияние может повлиять на прием на половину Земли, обращенной к Солнцу. Сцинтилляция чаще всего в тропических широтах, где это ночное явление возникает. Это происходит реже в высоких или средних широтах, где магнитные бури приводить к сцинтилляциям. Помимо мерцания, магнитные бури могут создавать сильные ионосферные градиенты, снижающие точность систем SBAS.
Искусственные источники помех
В автомобильных GPS-приемниках металлические элементы на лобовых стеклах, например, в дефростерах, или пленках для тонировки автомобильных стекол может действовать как клетка Фарадея, ухудшающаяся качество приема сигнала внутри автомобиля.
Искусственные EMI (электромагнитные помехи) также могут нарушать или заглушать сигналы GPS. В одном случае невозможно было принять сигналы GPS для всей гавани Мосс-Лендинг, Калифорния из-за непреднамеренных помех, вызванных неисправностью предварительных усилителей телевизионной антенны. Также возможно преднамеренное заклинивание. Как правило, более сильные сигналы могут создавать помехи для приемников GPS, когда они находятся в пределах радиосвязи или в пределах прямого видимости. В 2002 году подробное описание того, как построить глушитель GPS L1 C / A ближнего действия, было опубликовано в онлайн-журнале Phrack.
The U.S. Правительство считает, что такие глушители времени использовались во время войны в Афганистане, а военные США заявляют, что уничтожили глушителей GPS во время войны в Ираке, в том числе один, который был уничтожен с бомбой с GPS-наведением. Глушитель GPS относительно легко определяет его местонахождение, делает его привлекательной целью для противорадиационных ракет. 7 и 8 июня 2007 г. Министерство обороны Великобритании провело испытания системы глушения в западной части Великобритании.
В некоторых странах разрешено использование ретрансляторов GPS для приема сигналов GPS в помещениях и в темных местах; в то время как в других странах это запрещено, поскольку ретранслируемые сигналы могут вызывать многолучевые помехи для других приемников GPS, которые получают данные как от спутников GPS, так и от ретранслятора. В Великобритании Ofcom теперь разрешает использование повторителей GPS / GNSS в рамках режима «облегченного лицензирования».
Из-за возможности возникновения как естественного, так и искусственного шума, продолжают развиваться многочисленные методы устранения помех. Первое — не полагаться на GPS как на единственный источник. По словам Джона Рули, «пилоты IFR должны иметь запасной план на случай сбоя GPS». Автономный мониторинг целостности приемника (RAIM) — это функция, включенная в некоторые приемники, предназначенная для предупреждать пользователя при обнаружении заедания или другой проблемы. С 2004 года военные США также развернули свой модуль выборочной доступности / защиты от спуфинга (SAASM) в составе усовершенствованного GPS-приемника обороны (DAGR). В демонстрационных видеороликах было показано, что DAGR обнаруживает помехи и сохраняет свою блокировку на зашифрованных сигналах GPS во время помех, из-за которых гражданские приемники теряют захват.
См. Также
Примечания
Ссылки
- Grewal, Mohinder S.; Вайль, Лоуренс Рэндольф; Эндрюс, Ангус П. (2001). Глобальные системы позиционирования, инерциальная навигация и интеграция. Джон Уайли и сыновья. ISBN 978-0-47135-032-3.
- Паркинсон; Спилкер (1996). Глобальная система позиционирования. Американский институт аэронавтики и астрономии. ISBN 978-1-56347-106-3.
- Уэбб, Стивен (2004). Из этого мира: сталкивающиеся вселенные, браны, струны и другие дикие идеи современной физики. Springer. ISBN 0-387-02930-3. Проверено 16 августа 2013 г.
Внешние ссылки
- GPS.gov — веб-сайтом общего образования, созданным правительством США
- Стандарт производительности GPS SPS — официальная спецификация стандартной службы определения местоположения (версия 2008 года).
- Стандарт производительности GPS SPS — официальная спецификация стандартной службы определения местоположения (версия 2001 года).
Художественная концепция спутника GPS Block II-F на орбите
В анализ ошибок для спутниковая система навигации важно для понимания того, как работает GPS, и для того, чтобы знать, какой величины ошибок следует ожидать. GPS вносит поправки на ошибки часов приемника и другие эффекты, но остаются остаточные ошибки, которые не исправляются. Положение приемника GPS вычисляется на основе данных, полученных со спутников. Ошибки зависят от геометрического снижения точности и источников, перечисленных в таблице ниже.
Обзор
|
|
В этом разделе фактическая точность оспаривается. Соответствующее обсуждение можно найти на Обсуждение: Анализ ошибок для глобальной системы позиционирования. Пожалуйста, помогите убедиться, что оспариваемые утверждения надежный источник. (Июнь 2016) (Узнайте, как и когда удалить этот шаблон сообщения) |
| Источник | Эффект (м) |
|---|---|
| Прибытие сигнала C / A | ±3 |
| Прибытие сигнала P (Y) | ±0.3 |
| Ионосферные эффекты | ±5 |
| Ошибки эфемерид | ±2.5 |
| Ошибки спутниковых часов | ±2 |
| Многолучевое искажение | ±1 |
| Тропосферные эффекты | ±0.5 |
| C / A |
±6.7 |
| P (Y) |
±6.0 |
Диаграмма геометрических ошибок, показывающая типичное соотношение отображаемого положения приемника, пересечения поверхностей сфер и истинного положения приемника в терминах ошибок псевдодальности, PDOP и числовых ошибок
Ошибки эквивалентного диапазона пользователя (UERE) показаны в таблице. Также есть числовая ошибка с оценочной стоимостью,
Термин «ошибка эквивалентного диапазона пользователя» (UERE) относится к ошибке компонента на расстоянии от приемника до спутника. Эти ошибки UERE представлены как ошибки ±, что означает, что они являются несмещенными или нулевыми средними ошибками. Поэтому эти ошибки UERE используются при вычислении стандартных отклонений. Стандартное отклонение ошибки положения приемника,
PDOP вычисляется как функция положения приемника и спутника. Подробное описание того, как рассчитать PDOP, дано в разделе Геометрическое снижение точности вычислений (GDOP).
Стандартное отклонение ошибки в предполагаемом положении приемника
Диаграмма ошибок слева показывает взаимосвязь указанного положения приемника, истинного положения приемника и пересечения четырех сферических поверхностей.
Измерение времени прихода сигнала
Положение, вычисленное приемником GPS, требует текущего времени, положения спутника и измеренной задержки принятого сигнала. Точность определения местоположения в первую очередь зависит от местоположения спутника и задержки сигнала.
Чтобы измерить задержку, приемник сравнивает битовую последовательность, полученную от спутника, с версией, созданной внутри. Сравнивая нарастающий и задний фронты битовых переходов, современная электроника может измерять смещение сигнала с точностью до одного процента от ширины битового импульса,
Этот компонент точности позиционирования можно улучшить в 10 раз, используя сигнал P (Y) с более высокой чиповой скоростью. Предполагая тот же один процент точности ширины битового импульса, высокочастотный сигнал P (Y) дает точность
Атмосферные эффекты
Несоответствие атмосферных условий влияет на скорость сигналов GPS, когда они проходят через Атмосфера Земли, особенно ионосфера. Исправление этих ошибок является серьезной проблемой для повышения точности определения местоположения GPS. Эти эффекты наименьшие, когда спутник находится прямо над головой, и усиливаются для спутников, расположенных ближе к горизонт так как путь через атмосферу длиннее (см. масса воздуха ). Как только приблизительное местоположение приемника известно, можно использовать математическую модель для оценки и компенсации этих ошибок.
Ионосферная задержка СВЧ-сигнала зависит от его частоты. Он возникает из ионизированной атмосферы (см. Общее электронное содержание ). Это явление известно как разброс и может быть рассчитан на основе измерений задержек для двух или более полос частот, что позволяет оценить задержки на других частотах.[1] Некоторые военные и дорогие гражданские приемники исследовательского класса рассчитывают атмосферную дисперсию по различным задержкам на частотах L1 и L2 и применяют более точную поправку. Это можно сделать в гражданских приемниках без расшифровки сигнала P (Y), передаваемого по L2, путем отслеживания несущая волна вместо модулированный код. Чтобы облегчить это на более дешевых приемниках, новый гражданский кодовый сигнал на L2, названный L2C, был добавлен к спутникам Block IIR-M, которые были впервые запущены в 2005 году. Он позволяет прямое сравнение сигналов L1 и L2 с использованием кодированных сигнал вместо несущей.
Воздействие ионосферы обычно изменяется медленно и может быть усреднено по времени. Эти значения для любой конкретной географической области можно легко вычислить, сравнив положение, измеренное с помощью GPS, с известным местом съемки. Эта поправка также действительна для других приемников в том же месте. Некоторые системы отправляют эту информацию по радио или другим каналам, чтобы приемники, работающие только на L1, могли вносить ионосферные поправки. Ионосферные данные передаются через спутник в Спутниковые системы дополнения (SBAS) такие как Система увеличения площади (WAAS) (доступно в Северной Америке и на Гавайях), EGNOS (Европа и Азия), Многофункциональная спутниковая система дополнения (MSAS) (Япония) и GPS-навигация с гео-дополнениями (GAGAN) (Индия), который передает его на частоте GPS с использованием специальной псевдослучайной шумовой последовательности (PRN), поэтому требуются только один приемник и антенна.
Влажность также вызывает переменную задержку, приводящую к ошибкам, аналогичным ионосферной задержке, но возникающим в тропосфера. Этот эффект более локализован, чем ионосферные эффекты, изменяется быстрее и не зависит от частоты. Эти особенности делают точное измерение и компенсацию ошибок влажности более трудными, чем ионосферные эффекты.[2]
В Атмосферное давление может также изменить задержку приема сигналов из-за присутствия в тропосфере сухих газов (78% N2, 21% O2, 0,9% Ar …). Его действие меняется в зависимости от местной температуры и атмосферного давления вполне предсказуемым образом с использованием законов идеальных газов.[3]
Эффекты многолучевого распространения
На сигналы GPS также могут влиять многолучевость проблемы, при которых радиосигналы отражаются от окружающей местности; здания, стены каньона, твердый грунт и т. д. Эти задержанные сигналы вызывают ошибки измерения, которые различны для каждого типа сигнала GPS из-за его зависимости от длины волны.[4]
Для уменьшения ошибок, связанных с многолучевым распространением, были разработаны различные методы, в первую очередь узкий интервал между корреляторами. Для многолучевого распространения с большой задержкой приемник сам может распознать встречный сигнал и отбросить его. Для решения проблемы многолучевого распространения с более короткой задержкой от сигнала, отражающегося от земли, специальные антенны (например, дроссельная заслонка антенны ) может использоваться для уменьшения мощности сигнала, принимаемого антенной. Отражения с короткой задержкой труднее отфильтровать, потому что они мешают истинному сигналу, вызывая эффекты, почти неотличимые от обычных колебаний атмосферной задержки.
Эффекты многолучевого распространения гораздо менее серьезны в движущихся транспортных средствах. Когда антенна GPS движется, ложные решения с использованием отраженных сигналов быстро не сходятся, и только прямые сигналы приводят к стабильным решениям.
Эфемериды и ошибки часов
В то время как эфемериды данные передаются каждые 30 секунд, сама информация может быть старше двух часов. Изменчивость давления солнечной радиации[5] косвенно влияет на точность GPS из-за влияния на ошибки эфемерид. Если пост время сначала исправить (TTFF), можно загрузить действительные эфемериды в приемник, и в дополнение к установке времени, определение местоположения может быть получено менее чем за десять секунд. Такие эфемеридные данные можно разместить в Интернете, чтобы их можно было загрузить в мобильные устройства GPS.[6] Смотрите также Вспомогательный GPS.
Атомные часы спутников испытывают шум и часы дрейф ошибки. В навигационном сообщении содержатся исправления этих ошибок и оценки точности атомных часов. Однако они основаны на наблюдениях и могут не указывать на текущее состояние часов.
Эти проблемы, как правило, очень малы, но могут составлять несколько метров (десятков футов) неточности.[7]
Для очень точного позиционирования (например, в геодезия ) эти эффекты могут быть устранены дифференциальный GPS: одновременное использование двух и более приемников на нескольких точки обследования. В 1990-е годы, когда приемники были довольно дорогими, некоторые методы квазидифференциальный GPS были разработаны, используя только один приемник, но повторное заселение точек измерения. В Венском техническом университете метод получил название qGPS и было разработано программное обеспечение для постобработки.[нужна цитата ]
Геометрическое снижение точности вычислений (GDOP)
Расчет геометрического снижения точности
Понятие геометрического снижения точности было введено в разделе, источники ошибок и анализ. Были предоставлены расчеты, чтобы показать, как использовался PDOP и как он влиял на стандартное отклонение ошибки местоположения приемника.
Когда видимые спутники GPS расположены близко друг к другу в небе (т. Е. С небольшим угловым разделением), значения DOP высокие; когда они далеко друг от друга, значения DOP низкие. По идее, спутники, которые расположены близко друг к другу, не могут предоставить столько информации, как спутники, которые находятся на большом расстоянии друг от друга. Низкие значения DOP представляют лучшую точность позиционирования GPS из-за более широкого углового разнесения между спутниками, используемыми для расчета положения приемника GPS. HDOP, VDOP, PDOP и TDOP — это соответственно по горизонтали, вертикали, позиции (3-D) и временного снижения точности.
Рисунок 3.1 Снижение точности данных Navstar GPS от береговой охраны США дает графическое представление о том, как геометрия влияет на точность.[8]
Теперь мы беремся за задачу, как вычислить снижение точности. В качестве первого шага в вычислении DOP рассмотрим единичный вектор от приемника к спутнику i с компонентами
куда
Первые три элемента каждой строки А являются компонентами единичного вектора от приемника до указанного спутника. Элементами в четвертом столбце являются c, где c обозначает скорость света. Сформулируйте матрицу, Q, так как
Это вычисление производится в соответствии с главой 11 Глобальной системы позиционирования Паркинсона и Спилкера, где весовая матрица п, был установлен в единичную матрицу. Элементы Q матрицы обозначены как:[9]
Греческая буква
в соответствии с «Раздел 1.4.9 ПРИНЦИПОВ РАЗМЕЩЕНИЯ СПУТНИКОВ».
Горизонтальное снижение точности,
Вывод уравнений для вычисления геометрического снижения точности
Уравнения для вычисления геометрического снижения точности членов были описаны в предыдущем разделе. В этом разделе описывается вывод этих уравнений. Используемый здесь метод аналогичен используемому в «Глобальная система позиционирования (превью) Паркинсона и Спайкера»
Рассмотрим вектор ошибки положения,
куда
Переставляем обе стороны:
После умножения матриц с обеих сторон уравнения (2) на соответствующие матрицы в уравнении (3) получаем
Взяв ожидаемое значение с обеих сторон и взяв неслучайные матрицы за пределы оператора ожидания, E, получаем:
Предполагая, что ошибки псевдодальности некоррелированы и имеют одинаковую дисперсию, ковариационная матрица с правой стороны может быть выражена как скаляр, умноженный на единичную матрицу. Таким образом
поскольку
Примечание:
Замена на
Из уравнения (7) следует, что отклонения указанного положения приемника и времени равны
Остальные условия дисперсии ошибки положения и времени следуют прямо.
Выборочная доступность
В GPS есть (в настоящее время отключена) функция под названием Выборочная доступность (SA), который добавляет к общедоступным навигационным сигналам преднамеренные изменяющиеся во времени погрешности до 100 метров (328 футов). Это было сделано с целью запретить противнику использовать гражданские приемники GPS для наведения высокоточного оружия.
Ошибки SA на самом деле являются псевдослучайными, генерируются криптографическим алгоритмом из классифицированного семя ключ доступный только авторизованным пользователям (военные США, их союзники и некоторые другие пользователи, в основном правительственные) со специальным военным приемником GPS. Простого владения приемником недостаточно; ему по-прежнему нужен строго контролируемый ежедневный ключ.
До отключения 2 мая 2000 года типичные ошибки SA составляли около 50 м (164 фута) по горизонтали и около 100 м (328 футов) по вертикали.[10] Поскольку SA влияет на каждый приемник GPS в данной области почти одинаково, фиксированная станция с точно известным местоположением может измерять значения ошибок SA и передавать их местным приемникам GPS, чтобы они могли исправить свои определения местоположения. Это называется дифференциальным GPS или DGPS. DGPS также исправляет несколько других важных источников ошибок GPS, в частности ионосферную задержку, поэтому он продолжает широко использоваться, даже если SA отключен. Неэффективность SA перед лицом широко доступной DGPS была распространенным аргументом в пользу отключения SA, и в конечном итоге это было сделано по приказу президента. Клинтон в 2000 г.[11]
Услуги DGPS широко доступны как из коммерческих, так и из государственных источников. К последним относятся WAAS и Береговая охрана США сеть LF морские навигационные маяки. Точность поправок зависит от расстояния между пользователем и приемником DGPS. По мере увеличения расстояния ошибки на двух участках также не будут коррелировать, что приведет к менее точным дифференциальным поправкам.
В 1990–91 гг. Война в Персидском заливе из-за нехватки военных устройств GPS многие военнослужащие и их семьи покупали легкодоступные гражданские устройства. Выборочная доступность значительно затруднила использование этих GPS военными США на поле боя, поэтому военные приняли решение отключить его на время войны.
В 1990-е гг. FAA начал оказывать давление на военных, чтобы они отключили СА навсегда. Это позволило бы FAA ежегодно экономить миллионы долларов на обслуживании собственных радионавигация системы. Сумма добавленной ошибки была «установлена на ноль».[12] в полночь 1 мая 2000 г. после заявления президента США Билл Клинтон, позволяя пользователям получать доступ к безошибочному сигналу L1. Согласно директиве, вызванная ошибка SA была изменена, чтобы не добавлять ошибок к общедоступным сигналам (код C / A). Указ Клинтона требовал, чтобы SA была обнулена к 2006 году; это произошло в 2000 году, когда американские военные разработали новую систему, которая дает возможность отказывать в использовании GPS (и другим навигационным службам) враждебным силам в конкретной зоне кризиса, не затрагивая остальной мир или свои собственные военные системы.[12]
19 сентября 2007 г. Министерство обороны США объявил, что будущее GPS III спутники не смогут реализовать SA,[13] в конечном итоге сделав политику постоянной.[14]
Антиспуфинг
Остается еще одно ограничение по GPS — антиспуфинг. Это шифрует P-код так что он не может быть имитирован передатчиком, отправляющим ложную информацию. Немногие гражданские приемники когда-либо использовали P-код, и точность, достигаемая с помощью общедоступного кода C / A, была намного лучше, чем ожидалось изначально (особенно с DGPS ), настолько сильно, что политика защиты от подделки имеет относительно небольшое влияние на большинство гражданских пользователей. Отключение функции защиты от подделки в первую очередь принесет пользу геодезистам и некоторым ученым, которым необходимы чрезвычайно точные положения для таких экспериментов, как отслеживание движения тектонических плит.
Относительность
Спутниковые часы замедляются из-за своей орбитальной скорости, но ускоряются из-за расстояния от гравитационного колодца Земли.
Существует ряд источников ошибок из-за релятивистский последствия[15] это сделало бы систему бесполезной, если бы ее не исправляли. Три релятивистских эффекта — это замедление времени, гравитационный сдвиг частоты и эффекты эксцентриситета. Примеры включают релятивистское время замедление из-за скорости спутника около 1 части из 1010, гравитационное замедление времени, которое заставляет спутник лететь примерно на 5 частей из 1010 Быстрее чем часы на Земле, и Эффект Саньяка из-за вращения относительно приемников на Земле. Эти темы рассматриваются ниже по очереди.
Специальная и общая теория относительности
Согласно теории относительности, из-за их постоянного движения и высоты относительно Земли в центре, невращающиеся приблизительно инерционные система отсчета на часы спутников влияет их скорость. Специальная теория относительности предсказывает, что частота атомных часов, движущихся с орбитальной скоростью GPS, будет идти медленнее, чем стационарные наземные часы, в раз
Влияние сдвига частоты гравитации на GPS из-за общая теория относительности в том, что часы ближе к массивному объекту будут медленнее, чем часы дальше. Применительно к GPS приемники расположены намного ближе к Земле, чем спутники, в результате чего часы GPS работают быстрее в 5 × 10 раз.−10, или около 45,9 мкс / день. Этот сдвиг частоты гравитации заметен.
При объединении замедления времени и гравитационного сдвига частоты расхождение составляет около 38 микросекунд в сутки, то есть разница в 4,465 частей на 1010.[16] Без исправления в позиции будут накапливаться ошибки примерно 11,4 км / день.[17] Эта начальная ошибка псевдодальности исправляется в процессе решения уравнения навигации. Вдобавок эллиптические, а не идеально круглые орбиты спутников вызывают изменение во времени эффектов замедления времени и гравитационного сдвига частоты. Этот эффект эксцентриситета приводит к тому, что разница в тактовой частоте спутника GPS и приемника увеличивается или уменьшается в зависимости от высоты спутника.
Чтобы компенсировать это несоответствие, стандарту частоты на борту каждого спутника перед запуском дается сдвиг скорости, что делает его немного медленнее, чем желаемая частота на Земле; в частности, на 10,22999999543 МГц вместо 10,23 МГц.[18] Поскольку атомные часы на борту спутников GPS точно настроены, это делает систему практическим инженерным приложением научной теории относительности в реальной среде.[19] Размещение атомных часов на искусственных спутниках для проверки общей теории Эйнштейна было предложено Фридвардт Винтерберг в 1955 г.[20]
Расчет замедления времени
Чтобы рассчитать количество ежедневного замедления времени, которое испытывают спутники GPS относительно Земли, нам необходимо отдельно определить суммы, связанные с специальная теория относительности (скорость) и общая теория относительности (гравитация) и сложите их вместе.
Сумма из-за скорости будет определяться с помощью Преобразование Лоренца. Это будет:
Для малых значений v / c, используя биномиальное разложение это приблизительно:
Спутники GPS движутся на 3874 м / с относительно центра Земли.[18] Таким образом, мы определяем:
Эта разница ниже 1 из 8.349×10−11 представляет собой долю, на которую часы спутников движутся медленнее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
То есть часы спутников теряют 7214 наносекунд в сутки из-за специальная теория относительности последствия.
- Обратите внимание, что эта скорость 3874 м / с измеряется относительно центра Земли, а не ее поверхности, где находятся приемники GPS (и пользователи). Это связано с тем, что эквипотенциал Земли делает чистое замедление времени равным по всей ее геодезической поверхности.[21] То есть комбинация специальных и общих эффектов делает чистое замедление времени на экваторе равным таковому у полюсов, которые, в свою очередь, покоятся относительно центра. Следовательно, мы используем центр как опорную точку для представления всей поверхности.
Степень расширения под действием силы тяжести будет определяться с помощью гравитационное замедление времени уравнение:
Для малых значений Мистер, используя биномиальное разложение это приблизительно:
Нас снова интересует только дробь меньше 1 и разница между Землей и спутниками. Для определения этой разницы берем:
Земля имеет радиус 6,357 км (на полюсах), что рземной шар = 6 357 000 м, а спутники имеют высоту 20 184 км.[18] делая их радиус орбиты рGPS = 26 541 000 м. Подставив их в приведенное выше уравнение, с Mземной шар = 5.974×1024, грамм = 6.674×10−11, и c = 2.998×108 (все в SI ед.), дает:
Это часть, на которую часы спутников движутся быстрее, чем часы Земли. Затем оно умножается на количество наносекунд в день:
То есть часы спутников набирают 45 850 наносекунд в день за счет общая теория относительности последствия. Эти эффекты суммируются, чтобы дать (округлено до 10 нс):
- 45850 — 7210 = 38640 нс
Таким образом, часы спутников набирают примерно 38 640 наносекунд в день или 38,6 мкс в день в целом из-за эффектов относительности.
Чтобы компенсировать это усиление, частота часов GPS должна быть уменьшена на долю:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
Эта доля вычитается из 1 и умножается на предварительно настроенную тактовую частоту 10,23 МГц:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
То есть нам нужно замедлить частоту с 10,23 МГц до 10,22999999543 МГц, чтобы свести на нет эффекты относительности.
Искажение Саньяка
Обработка данных GPS-наблюдений также должна компенсировать Эффект Саньяка. Шкала времени GPS определяется в инерционный системы, но наблюдения обрабатываются в В центре Земли, фиксировано на Земле (совместно вращающаяся) система, система, в которой одновременность не определено однозначно. Таким образом, для преобразования инерциальной системы в систему ECEF применяется преобразование координат. Полученная коррекция времени прохождения сигнала имеет противоположные алгебраические знаки для спутников в Восточном и Западном небесных полушариях. Игнорирование этого эффекта приведет к ошибке восток-запад порядка сотен наносекунд или десятков метров в местоположении.[22]
Естественные источники помех
Поскольку сигналы GPS на наземных приемниках обычно относительно слабые, естественные радиосигналы или рассеяние сигналов GPS могут снижать чувствительность приемник, что затрудняет или делает невозможным получение и отслеживание спутниковых сигналов.
Космическая погода ухудшает работу GPS двумя способами: прямые помехи из-за всплесков солнечного радио в той же полосе частот[23] или путем рассеяния радиосигнала GPS на ионосферных неоднородностях, называемого сцинтилляцией.[24] Обе формы деградации следуют за 11-летием. солнечный цикл и максимальны при максимуме солнечных пятен, хотя они могут произойти в любое время. Солнечные радиовсплески связаны с солнечные вспышки и выбросы корональной массы (CME)[25] и их воздействие может повлиять на прием на половине Земли, обращенной к Солнцу. Сцинтилляция чаще всего возникает в тропических широтах, где это ночное явление. Это происходит реже в высоких или средних широтах, где магнитные бури могут приводить к мерцанию.[26] Помимо мерцаний, магнитные бури могут создавать сильные ионосферные градиенты, снижающие точность систем SBAS.[27]
Искусственные источники помех
В автомобильных GPS-приемниках металлические детали на лобовых стеклах,[28] например, антиобледенители или тонировочные пленки для автомобильных стекол[29] может действовать как Клетка Фарадея, унизительный прием прямо в машине.
Рукотворный EMI (электромагнитные помехи) также могут нарушить или варенье Сигналы GPS. В одном хорошо задокументированном случае невозможно было принимать сигналы GPS во всей гавани Моховая посадка, Калифорния из-за непреднамеренных помех, вызванных неисправностью предварительных усилителей телевизионной антенны.[30][31] Также возможно преднамеренное заклинивание. Как правило, более сильные сигналы могут создавать помехи для приемников GPS, когда они находятся в пределах радиосвязи или в пределах прямой видимости. В 2002 году в онлайн-журнале было опубликовано подробное описание того, как построить глушитель GPS L1 C / A ближнего действия. Phrack.[32]
В правительство США считает, что такие глушилки иногда использовались во время Война в Афганистане, а военные США утверждают, что уничтожили шесть глушителей GPS во время Война в Ираке, в том числе тот, который был уничтожен бомбой с наведением GPS.[33] Глушитель GPS относительно легко обнаружить и найти, что делает его привлекательной целью для противорадиационные ракеты. 7 и 8 июня 2007 года Министерство обороны Великобритании провело испытания системы постановки помех в западной части Великобритании.[нужна цитата ]
В некоторых странах разрешено использование ретрансляторов GPS для приема сигналов GPS в помещении и в недоступных местах; в то время как в других странах это запрещено, поскольку ретранслируемые сигналы могут вызывать многолучевые помехи для других приемников GPS, которые получают данные как от спутников GPS, так и от ретранслятора. В Великобритании Ofcom теперь разрешает использование репитеров GPS / GNSS.[34] в режиме «облегченного лицензирования».
Из-за возможности возникновения как естественного, так и искусственного шума продолжают развиваться многочисленные методы устранения помех. Первое — не полагаться на GPS как на единственный источник. По словам Джона Рули, «IFR у пилотов должен быть запасной план на случай отказа GPS ».[35] Автономный мониторинг целостности приемника (RAIM) — это функция, включенная в некоторые приемники, предназначенная для предупреждения пользователя при обнаружении помех или другой проблемы. Американские военные также развернули с 2004 г. Модуль выборочной доступности / защиты от спуфинга (SAASM) в Усовершенствованный GPS-приемник Defense (ДАГР).[36] В демонстрационных видеороликах было показано, что DAGR обнаруживает помехи и сохраняет свою блокировку на зашифрованных сигналах GPS во время помех, из-за которых гражданские приемники теряют захват.
Смотрите также
- Дополнение GPS
Примечания
- ^ Тот же принцип и лежащая в его основе математика можно найти в описании хронометраж пульсаров астрономами.
- ^ Navipedia: Мониторинг тропосферы
- ^ Navipedia: задержка тропосферы
- ^ Navipedia: Multipath
- ^ Отчет о ходе работы IPN 42-159 (2004)
- ^ SNT080408. «Пример эфемеридного сервера». Tdc.co.uk. Архивировано из оригинал 12 января 2009 г.. Получено 2009-10-13.
- ^ «Блок 1 — Введение в GPS». Архивировано из оригинал 29 апреля 2009 г.
- ^ «Введение в пользовательское оборудование NAVSTAR GPS» (PDF). Центр навигации береговой охраны США. Береговая охрана США. Сентябрь 1996. Получено 5 июля, 2014.
- ^ Паркинсон (1996)
- ^ Grewal (2001), стр. 103.
- ^ «Президент Клинтон приказывает прекратить выборочную доступность GPS».
- ^ а б «Заявление президента относительно решения США прекратить снижение точности глобальной системы позиционирования». Федеральная авиационная администрация. 1 мая 2000 г.. Получено 2013-01-04.
- ^ «DoD навсегда прекращает закупку выборочной доступности глобальной системы позиционирования». DefenseLink. 18 сентября 2007 г. Архивировано с оригинал 18 февраля 2008 г.. Получено 2008-02-20.
- ^ «Выборочная доступность». Национальный космический исполнительный комитет по позиционированию, навигации и хронометражу. Архивировано из оригинал 13 января 2008 г.. Получено 2008-02-20.
- ^ Уэбб (2004), стр. 32.
- ^ Ризос, Крис. Университет Нового Южного Уэльса. Спутниковые сигналы GPS В архиве 2010-06-12 на Wayback Machine. 1999.
- ^ Фараони, Валерио (2013). Специальная теория относительности (иллюстрированный ред.). Springer Science & Business Media. п. 54. ISBN 978-3-319-01107-3. Выдержка страницы 54
- ^ а б c Глобальная система позиционирования Роберта А. Нельсона через спутник, Ноябрь 1999 г.
- ^ Погге, Ричард В .; «Реальная теория относительности: система навигации GPS». Проверено 25 января 2008 года.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Получено 2009-10-23.
- ^ С. П. Дрейк (январь 2006 г.). «Принцип эквивалентности как ступенька от специальной теории относительности к общей» (PDF). Являюсь. J. Phys., Vol. 74, №1. С. 22–25.
- ^ Эшби, Нил Относительность и GPS. Физика сегодня, Май 2002 г.
- ^ Черрути А., П. М. Кинтнер, Д. Э. Гэри, А. Дж. Маннуччи, Р. Ф. Мейер, П. Х. Доэрти и А. Дж. Костер (2008), Влияние интенсивных солнечных радиовсплесков в декабре 2006 г. на приемники GPS, Космическая погода, Дои:10.1029 / 2007SW000375, 19 октября 2008 г.
- ^ Аарон, Жюль; Басу, Сантимей (1994). «Ионосферные амплитудные и фазовые флуктуации на частотах GPS». Труды ION GPS. 2: 1569–1578.
- ^ С. Манкузо и Дж. К. Раймонд, «Корональные транзиенты и метрические радиовсплески типа II. I. Эффекты геометрии, 2004 г., Астрономия и астрофизика, т. 413, стр. 363-371»
- ^ Ледвина, Б. М .; Дж. Дж. Макела и П. М. Кинтнер (2002). «Первые наблюдения интенсивных мерцаний амплитуды GPS L1 на средних широтах». Письма о геофизических исследованиях. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. Дои:10.1029 / 2002GL014770.
- ^ Том Диль, Солнечные вспышки поражают Землю — WAAS изгибается, но не ломается, Новости спутниковой навигации, том 23, июнь 2004 г.
- ^ «Крепление I-PASS для автомобилей с особыми функциями лобового стекла» (PDF). Архивировано из оригинал (PDF) 26 марта 2010 г.
- ^ «3М Автомобильные пленки».. Обратите внимание, что пленки со стабильным цветом специально описаны как нет создание помех спутниковым сигналам.
- ^ «Охота на RFI». GPS мир. 1 января 2003 г.
- ^ «Клуб соответствия требованиям EMC» банановые кожуры «колонка 222». Compliance-club.com. Получено 2009-10-13.
- ^ Недорогой портативный глушитель GPS. Phrack выпуск 0x3c (60), статья 13. Опубликовано 28 декабря 2002 г.
- ^ Пресс-служба американских войск. Прогресс Centcom. 25 марта 2003 г. В архиве 3 декабря 2009 г. Wayback Machine
- ^ [1] Заявление Ofcom о режиме авторизации для ретрансляторов GNSS
- ^ Рули, Джон. AVweb. Глушение GPS. 12 февраля 2003 г.
- ^ Страница DAGR армии США В архиве 2012-08-05 в Archive.today
Рекомендации
- Grewal, Mohinder S .; Вайль, Лоуренс Рэндольф; Эндрюс, Ангус П. (2001). Системы глобального позиционирования, инерциальная навигация и интеграция. Джон Уайли и сыновья. ISBN 978-0-47135-032-3.
- Паркинсон; Спилкер (1996). Система глобального позиционирования. Американский институт аэронавтики и астрономии. ISBN 978-1-56347-106-3.
- Уэбб, Стивен (2004). Не из этого мира: сталкивающиеся вселенные, браны, струны и другие дикие идеи современной физики. Springer. ISBN 0-387-02930-3. Получено 2013-08-16.
внешняя ссылка
- GPS.gov —Общий веб-сайт общественного образования, созданный правительством США.
- Стандарт производительности GPS SPS — Официальная спецификация стандартной службы позиционирования (версия 2008 г.).
- Стандарт производительности GPS SPS — Официальная спецификация стандартной службы позиционирования (версия 2001 г.).