Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
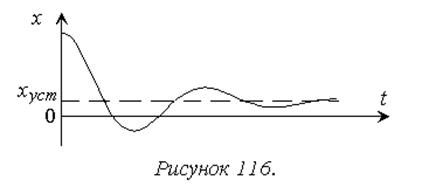
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() — передаточная функция
— передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
— при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
— при l=v получаем
константу;
— при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.
Статические режимы САУхарактеризуются
установившимися состояниями при
неизменных входных воздействиях.
Уравнения статики легко получить из
уравнений динамики САУ путем приравнивания
в них нулю всех производных по времени
переменных (координат состояния) и
внешних воздействий. В операторных
уравнениях и на структурных схемах (см.
гл. 5) линейных САУ это эквивалентно
нулевой частоте изменения переменных,
что достигается приравниванием нулю
оператораp.
Таким образом, статическая характеристика
системы– это зависимость выходной
переменной от какой-либо входной
переменной в статическом (установившемся)
режиме.
Примером статической характеристики
является механическая характеристика
двигателя постоянного тока (ДПТ) –
зависимость угловой частоты вращения
вала двигателя от момента нагрузки на
валу в установившихся режимах (рис.
4.1). Как видим, при увеличении нагрузки
на валу двигателя скорость вращения
вала двигателя падает и появляется
статическая ошибка регулирования
скорости. При изменении нагрузки от
нуля до номинального значения Mснскорость вращения уменьшается от
скорости холостого хода![]() до номинальной скорости
до номинальной скорости![]() .
.
В номинальном режиме статическая ошибка
регулирования скорости вращения
![]() . (4.1)
. (4.1)

Рис. 4.1. Статическая
механическая
характеристика
ДПТ
Найдем выражения для установившейся
ошибки регулирования при изменении
задающих или возмущающих воздействий
линейной системы управления.
Передаточная функция любой замкнутой
линейной САУ с отрицательной обратной
связью (рис. 4.2) определяется передаточными
функциями прямого
![]() и обратного
и обратного![]() каналов регулирования (см. гл. 5.3)
каналов регулирования (см. гл. 5.3)
![]() . (4.2)
. (4.2)

Рис. 4.2. Структурная
схема
замкнутой САУ
Отсюда изображение ошибки регулирования
в системе
![]() , (4.3)
, (4.3)
а передаточная функция по ошибке
![]() . (4.4)
. (4.4)
Как следует из (4.3), ошибка регулирования
будет стремиться к нулю при X = const,
если![]() ,
,
что предполагает реализацию бесконечно
большого усиления в устройстве управления
и может привести к неустойчивости
системы. Кроме того, реальные динамические
звенья обладают конечными коэффициентами
усиления, что приводит к возникновению
ненулевойстатической ошибки
регулирования.
Между тем, статическая ошибка регулирования
в системе при неизменном входном
воздействии может быть сведена к нулю,
если сделать равной нулю передаточную
функцию ошибки
![]() по задающему или возмущающему воздействию
по задающему или возмущающему воздействию
приp=0. Для этого достаточно в прямой
или обратный канал регулирования
системы, приведенной два рис. 4.2, ввести
интегрирующее звено. На практике
интегрирующее звено вводят в структуру
устройства управления, применяя И-, ПИ-,
ПИД-регуляторы. Это обеспечивает![]() и, тем самым нулевую статическую ошибку
и, тем самым нулевую статическую ошибку
регулирования.Такие системы принято
называть астатическимипервого
порядка по задающему или (и) возмущающему
воздействию. Для придания системе
астатизма более высокого порядка в
структуру регулятора вводят соответствующее
число интеграторов.
Величина установившейся ошибки
регулирования, наличие и порядок
астатизма замкнутой САУ определяются
не только ее моделью, но и видом
входного сигнала. Определим, как вид
входного воздействия влияет на величину
установившейся ошибки.
Передаточную функцию прямого канала
запишем в виде
 , (4.5)
, (4.5)
где K– коэффициент передачи,
zi,pj– полюсы и нули передаточной функции
(4.5).
Для определения величины установившейся
ошибки рассмотрим случай единичной
обратной связи, т. е.
![]() =1.
=1.
В установившихся режимах (при p
= 0) передаточную функцию (4.4)
можно записать в виде
![]() , (4.6)
, (4.6)
где Ki–
коэффициент ошибки системы, определяемый
видом входного воздействия,i = 0, 1,
2.
Поскольку в качестве типовых тестовых
сигналов применяют ступенчатое, линейное
и квадратичное входное воздействие, то
для оценки установившихся ошибок в
системе выделяют 3 типа коэффициентов
ошибок:
1) коэффициент ошибки по положению (i
= 0)
![]() ; (4.7)
; (4.7)
2) коэффициент ошибки по скорости (i =
1)
![]() ; (4.8)
; (4.8)
3) коэффициент ошибки по ускорению (i
= 2)
![]() . (4.9)
. (4.9)
Как следует из выражений (4.3)…(4.9),
установившиеся ошибки САУ могут иметь
нулевое, бесконечное или постоянное
значение в зависимости от числа
интеграторов в передаточной функции
W1(p)
и типа входного сигнала. Установившиеся
ошибки для трех типов входных воздействий
и трех типов передаточной функцииW1(p)
– с отсутствием интеграторов, с одним
и двумя интеграторами – приведены в
табл. 4.1.
Таблица
4.1
|
Число |
Входной |
||
|
Ступенчатый
|
Линейный
|
Квадратичный
|
|
|
0 |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
Динамические режимы САУхарактеризуются
переходными состояниями системы при
изменении входных (задающих и возмущающих)
воздействий. При этом различают свободные
и вынужденные переходные процессы.
Назовем процесс вынужденным, если
промежуток времени между моментомtз(tв) приложения
задающего (возмущающего) воздействияX(t) и моментом
наблюдения выходной величиныY(t)
равен бесконечности. В дальнейшем будем
полагать моменты времени приложения
воздействий равными нулю. Тогда процесс
изменения выходной величиныY(t)
в соответствие с теоремой свертывания
(умножения изображений) будет иметь вид
[19]
![]() , (4.10) где
, (4.10) где![]() —
—
импульсная переходная функция по
внешнему (задающему или возмущающему)
воздействию.
Свободный (собственный) процессв
системе определяется решением однородного
дифференциального уравнения, описывающего
САУ. Он протекает под действием ненулевых
начальных условийY(t0)
и в устойчивых системах асимптотически
затухает:
![]() ,
,
(4.11)
где ![]() – матрица перехода системы из начального
– матрица перехода системы из начального
состоянияY(t0)
в текущее состояниеY(t).
Понятие и расчет матрицы перехода
рассмотрены в гл. 9.3.
Полное решение уравнения движениялинейных САУ представляет собой сумму
решений уравнений свободного и
вынужденного движений.
В качестве примера на рис. 4.3 приведена
реакция электродвигателя постоянного
тока (полное решение уравнения движения)
на ступенчатое приложение номинальной
нагрузки Mсн
(возмущающего воздействия) к его валу.
При приложении нагрузки скорость
![]() двигателя падает, причем имеет место
двигателя падает, причем имеет место
колебательный процесс. Максимальный
динамический провал скорости![]() превышает статическое падение скорости
превышает статическое падение скорости![]() (см. рис. 4.1).
(см. рис. 4.1).

Рис. 4.3. Реакция
электродвигателя
на возмущающее
воздействие
в виде ступени
нагрузки на валу
Вынужденное движение соответствует
новому установившемуся состоянию —
номинальной скорости
![]() электродвигателя. Время переходного
электродвигателя. Время переходного
процесса (перехода в новое установившееся
состояние) составляетtр
.
Точность систем управления является
важнейшим показателем их качества. Чем выше точность, тем выше качество
системы. Однако предъявление повышенных требований к точности вызывает
неоправданное удорожание системы, усложняет ее конструкцию. Недостаточная
точность может привести к несоответствию характеристик системы условиям
функционирования и необходимости ее повторной разработки. Поэтому на этапе
проектирования системы должно быть проведено тщательное обоснование требуемых
показателей точности.
В этом разделе рассматриваются методы
определения ошибок, возникающих при работе систем управления с детерминированными
входными воздействиями. Вначале анализируются ошибки систем в переходном
режиме. Затем особое внимание уделено простым способам расчета ошибок систем в
установившемся режиме. Будет показано, что все системы управления можно разделить
по величине установившихся ошибок на системы без памяти, так называемые статические
системы, и системы, обладающие памятью, – астатические
системы управления.
Типовые
входные воздействия
Для оценки качества работы систем
управления рассматривают их поведение при некоторых типовых воздействиях.
Обычно такими воздействиями служат следующие три основные вида функций:
а) ступенчатое воздействие: g(t) =  , g(p) =
, g(p) = ![]() ;
;
б) линейное воздействие: g(t) = ![]() t , t > 0
t , t > 0
; ![]() ;
;

в) квадратичное воздействие:
![]() /2 , t > 0 ;
/2 , t > 0 ;
g(p) = ![]() .
.
В
некоторых случаях рассматривают обобщенное полиномиальное воздействие:
![]() , t > 0.
, t > 0.
Ступенчатое воздействие является одним
из простейших, но именно с его помощью определяется ряд важных свойств систем
управления, связанных с видом переходного процесса. Линейное и квадратичное
воздействия часто бывают связаны с задачами слежения за координатами
движущегося объекта. Тогда линейное воздействие соответствует движению объекта
с постоянной скоростью; квадратичное — движению объекта с постоянным ускорением.
Переходные процессы при типовых
воздействиях можно построить следующим образом. Пусть задана передаточная
функция замкнутой системы управления W(p). Тогда
x(p)
= W(p) g(p),
где g(p) – изображение соответствующего воздействия.
Например, если ![]() , то
, то ![]() и для g(t) = g0
и для g(t) = g0
получим ![]() .
.
С помощью вычетов или по таблицам
находим обратное преобразование Лапласа и получаем вид переходного процесса x(t)
для заданного входного воздействия:
![]() ,
,
где Res
x(p)
– вычет функции x(p)
в точке a.
Обычно реакция системы на ступенчатое
воздействие имеет вид, показанный на рис. 21,а или рис. 21,б.
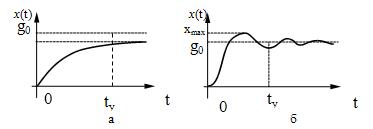
Рис.
21.
Переходный процесс,
как правило, характеризуют двумя параметрами – длительностью переходного
процесса (временем установления) и величиной перерегулирования.
Под временем установления tу
понимают временной интервал, по истечении которого отклонение |x(t) — xуст
| выходного процесса от установившегося значения xуст не
превышает определенную величину, например, 0,1gо. Время
установления является важным параметром САУ, позволяющим оценить ее быстродействие.
Величину tу можно оценить приближенно по амплитудно-частотной
характеристике системы. При заданной частоте среза ![]() . Для оценки качества системы
. Для оценки качества системы
используется также величина перерегулирования, определяемая соотношением ![]() .
.
В зависимости от
характера собственных колебаний системы переходный процесс в ней может быть
колебательным, как это показано на рис. 21, б, или плавным гладким, называемым
апериодическим (рис. 21,а). Если корни характеристического уравнения системы
действительны, то переходный процесс в ней апериодический. В случае
комплексных корней характеристического уравнения собственные колебания
устойчивой системы управления являются затухающими гармоническими и переходный
процесс в системе имеет колебательный характер.
При малом запасе устойчивости САУ ее
собственные колебания затухают медленно, и перерегулирование в переходном режиме
получается значительным. Как следствие, величина перерегулирования может
служить мерой запаса устойчивости системы. Для многих систем запас
устойчивости считается достаточным, если величина перерегулирования ![]() .
.
Установившийся
режим
При проектировании систем управления
часто требуется оценить ошибку слежения в установившемся режиме ![]() . В зависимости от
. В зависимости от
вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной
или бесконечно большой величиной.
Очень важно, что величина
установившейся ошибки может быть легко найдена с помощью теоремы о предельном
значении оригинала: ![]() .
.
При использовании этой теоремы нужно
выразить величину ошибки e (p) через g(p). Для этого рассмотрим
структурную схему замкнутой системы управления (рис. 22).
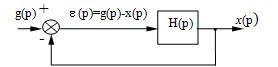
Рис.
22
Очевидно, e (p) = g(p) — x(p)
= g(p) — H(p)e(p). Отсюда ![]() или e (p) = He(p)g(p)
или e (p) = He(p)g(p)
, где He(p) = ![]() называется передаточной функцией
называется передаточной функцией
системы управления от входного воздействия g(p) к ошибке слежения e(p).
Таким образом, величину установившейся ошибки можно найти с помощью следующего
соотношения:
![]() ,
,
где He(p) = 1/(1+H(p));
g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим
систему управления, в составе которой нет интеграторов, например,
![]() .
.
Найдем величину установившейся
ошибки при ступенчатом входном воздействии g(t) = g0, t ³ 0.
В этом случае
 .
.
Предположим теперь, что входное
воздействие изменяется линейно ![]() t или
t или ![]() .
.
Тогда ![]() . Соответствующие входные воздействия и
. Соответствующие входные воздействия и
переходные процессы можно представить графиками на рис. 23,а и б.
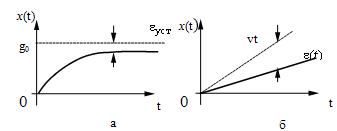
Рис.
23
Пример 2. Рассмотрим
теперь систему, содержащую один интегратор. Типичным примером может быть
система сервопривода (рис. 6) с ![]() .
.
Для ступенчатого воздействия g(t) = g0
или g(p) = ![]() получим
получим
 .
.
При линейном входном воздействии
 .
.
Такие процессы можно проиллюстрировать
соответствующими кривыми на рис.24, а и б.
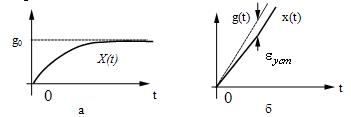
Рис.
24
Пример 3.
Рассмотрим систему с двумя интеграторами. Пусть, например, ![]() . При ступенчатом
. При ступенчатом
воздействии  .
.
При линейном  .
.
Наконец, если входное воздействие
квадратичное g(t) = at2/2 (g(p) = a/p3),
то
 .
.
Таким образом, в системе с двумя
интеграторами может осуществляться слежение за квадратичным входным
воздействием при конечной величине установившейся ошибки. Например, можно
следить за координатами объекта, движущегося с постоянным ускорением.
Статические
и астатические системы управления
Анализ рассмотренных примеров
показывает, что системы управления, содержащие интегрирующие звенья, выгодно
отличаются от систем без интеграторов. По этому признаку все системы делятся на
статические системы, не содержащие интегрирующих звеньев, и астатические
системы, которые содержат интеграторы. Системы с одним интегратором называются
системами с астатизмом первого порядка. Системы с двумя интеграторами –
системами с астатизмом второго порядка и т.д.
Для статических систем даже при
неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет
конечную величину g(t) = g0 . В системах с астатизмом первого
порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно
изменяющемся воздействии ![]() . Наконец, в системах с астатизмом
. Наконец, в системах с астатизмом
второго порядка ненулевая установившаяся ошибка появляется только при
квадратичных входных воздействиях g(t) = at2 /2 и
составляет величину eуст =
a/k.
Какие же физические причины лежат в
основе таких свойств астатических систем управления?
Рассмотрим систему управления с
астатизмом второго порядка (рис. 25)
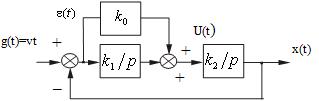
Рис.
25
Пусть входной сигнал системы управления
изменяется линейно: ![]()
![]() t. Как было
t. Как было
установлено, в такой системе установившаяся ошибка равна нулю, т.е. e
(t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t)
= ![]() t , то на
t , то на
входе второго интегратора должен быть сигнал ![]() . Действительно, при нулевом
. Действительно, при нулевом
рассогласовании e (t) =0 в системе с интеграторами
возможно существование ненулевого выходного сигнала первого интегратора ![]() . Первый интегратор
. Первый интегратор
после окончания переходного процесса «запоминает» скорость изменения входного
воздействия и в дальнейшем работа системы управления осуществляется по
«памяти». Таким образом, физическим объяснением такого значительного различия
статических и астатических систем является наличие памяти у астатических систем
управления.
*
* *
Итак, существуют простые возможности
определения важнейшего показателя систем управления – величины их динамических
ошибок. Детальный анализ переходных процессов в системах управления обычно
выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины
установившихся ошибок легко находятся аналитически. При этом астатические
системы управления, т.е. системы с интеграторами, имеют существенно лучшие
показатели качества по сравнению со статическими системами.
Васильев К.К. Теория автоматического управления (следящие системы) — файл n1.doc
приобрести
Васильев К.К. Теория автоматического управления (следящие системы)
скачать (1412 kb.)
Доступные файлы (1):
- Смотрите также:
- Кузнецов В.П., Лукьянец С.В., Крупская М.А. Теория автоматического управления. Часть 1: Линейные непрерывные системы (Документ)
- Харитонов Ю.М., Зайцев О.Н. Теория автоматического управления. Непрерывные линейные системы. Учебное пособие (Документ)
- Соломенцев Ю.М. Теория автоматического управления (Документ)
- Теория автоматического управления (Документ)
- Пузанов В.П. Лекции по курсу Теория автоматического управления. Теория линейных систем автоматического управления и регулирования (Документ)
- Воронов А.А. Теория автоматического управления. Часть первая (Документ)
- Васильев Д.В., Чуич В.Г. Системы автоматического управления (примеры расчета) (Документ)
- Васильев Д.В., Чуич В.Г. Системы автоматического управления (примеры расчета) (Документ)
- Рубанов В.Г. Линейные системы автоматизированного управления (САУ) (Документ)
- Ким Д.П. Теория автоматического управления (том 1) (Документ)
- Поляков К.Ю. Теория автоматического управления для чайников (Документ)
- Бесекерский В.А. Теория систем автоматического управления (Документ)
n1.doc
Установившийся режим
При проектировании систем управления часто требуется оценить ошибку слежения в установившемся режиме ![]() . В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной.
. В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной.
Очень важно, что величина установившейся ошибки может быть легко найдена с помощью теоремы о предельном значении оригинала: ![]() .
.
При использовании этой теоремы нужно выразить величину ошибки e (p) через g(p). Для этого рассмотрим структурную схему замкнутой системы управления (рис. 22).

Рис. 22
Очевидно, e (p) = g(p) — x(p) = g(p) — H(p)e(p). Отсюда ![]() или e (p) = He(p)g(p) , где He(p) =
или e (p) = He(p)g(p) , где He(p) = ![]() называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения:
называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения:
![]() ,
,
где He(p) = 1/(1+H(p)); g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим систему управления, в составе которой нет интеграторов, например,
![]() .
.
Найдем величину установившейся ошибки при ступенчатом входном воздействии g(t) = g0, t і 0. В этом случае
 .
.
Предположим теперь, что входное воздействие изменяется линейно ![]() t или
t или ![]() .
.
Тогда ![]() . Соответствующие входные воздействия и переходные процессы можно представить графиками на рис. 23,а и б.
. Соответствующие входные воздействия и переходные процессы можно представить графиками на рис. 23,а и б.

Рис. 23
Пример 2. Рассмотрим теперь систему, содержащую один интегратор. Типичным примером может быть система сервопривода (рис. 6) с ![]() .
.
Для ступенчатого воздействия g(t) = g0 или g(p) = ![]() получим
получим
 .
.
При линейном входном воздействии
 .
.
Такие процессы можно проиллюстрировать соответствующими кривыми на рис.24, а и б.

Рис. 24
Пример 3. Рассмотрим систему с двумя интеграторами. Пусть, например, ![]() . При ступенчатом воздействии
. При ступенчатом воздействии  .
.
При линейном  .
.
Наконец, если входное воздействие квадратичное g(t) = at2/2 (g(p) = a/p3), то
 .
.
Таким образом, в системе с двумя интеграторами может осуществляться слежение за квадратичным входным воздействием при конечной величине установившейся ошибки. Например, можно следить за координатами объекта, движущегося с постоянным ускорением.
Статические и астатические системы управления
Анализ рассмотренных примеров показывает, что системы управления, содержащие интегрирующие звенья, выгодно отличаются от систем без интеграторов. По этому признаку все системы делятся на статические системы, не содержащие интегрирующих звеньев, и астатические системы, которые содержат интеграторы. Системы с одним интегратором называются системами с астатизмом первого порядка. Системы с двумя интеграторами –системами с астатизмом второго порядка и т.д.
Для статических систем даже при неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет конечную величину g(t) = g0 . В системах с астатизмом первого порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно изменяющемся воздействии ![]() . Наконец, в системах с астатизмом второго порядка ненулевая установившаяся ошибка появляется только при квадратичных входных воздействиях g(t) = at2 /2 и составляет величину eуст = a/k.
. Наконец, в системах с астатизмом второго порядка ненулевая установившаяся ошибка появляется только при квадратичных входных воздействиях g(t) = at2 /2 и составляет величину eуст = a/k.
Какие же физические причины лежат в основе таких свойств астатических систем управления?
Рассмотрим систему управления с астатизмом второго порядка (рис. 25)

Рис. 25
Пусть входной сигнал системы управления изменяется линейно: ![]()
![]() t. Как было установлено, в такой системе установившаяся ошибка равна нулю, т.е. e (t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t) =
t. Как было установлено, в такой системе установившаяся ошибка равна нулю, т.е. e (t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t) = ![]() t , то на входе второго интегратора должен быть сигнал
t , то на входе второго интегратора должен быть сигнал ![]() . Действительно, при нулевом рассогласовании e (t) =0 в системе с интеграторами возможно существование ненулевого выходного сигнала первого интегратора
. Действительно, при нулевом рассогласовании e (t) =0 в системе с интеграторами возможно существование ненулевого выходного сигнала первого интегратора ![]() . Первый интегратор после окончания переходного процесса «запоминает» скорость изменения входного воздействия и в дальнейшем работа системы управления осуществляется по «памяти». Таким образом, физическим объяснением такого значительного различия статических и астатических систем является наличие памяти у астатических систем управления.
. Первый интегратор после окончания переходного процесса «запоминает» скорость изменения входного воздействия и в дальнейшем работа системы управления осуществляется по «памяти». Таким образом, физическим объяснением такого значительного различия статических и астатических систем является наличие памяти у астатических систем управления.
* * *
Итак, существуют простые возможности определения важнейшего показателя систем управления – величины их динамических ошибок. Детальный анализ переходных процессов в системах управления обычно выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины установившихся ошибок легко находятся аналитически. При этом астатические системы управления, т.е. системы с интеграторами, имеют существенно лучшие показатели качества по сравнению со статическими системами.
2.3. Эффективность систем управления при воздействии помех
Кроме динамических ошибок, в системах управления, как правило, имеются ошибки, вызванные действием помех. Случайные помехи возникают из-за целого ряда причин. Основными из них являются погрешности измерения координат объектов или состояния системы управления, пассивные или активные помехи, существующие в информационных каналах, а также разнообразные внутренние возмущения, действующие в системах управления. При выборе параметров систем необходимо учитывать величину и характер действующих помех таким образом, чтобы минимизировать их влияние на качество работы системы управления.
Вначале кратко рассмотрим математические методы описания помех в системах управления, которые базируются на теории вероятностей и теории случайных процессов. Если изучение этого материала вызывает трудности, то следует повторить курс теории вероятностей [15]. После этого проанализируем возможности нахождения дисперсии ошибок в системах управления за счет действия помех. В заключение рассмотрим конкретные значения дисперсии помех для системы управления сервоприводом и определим оптимальные параметры системы, минимизирующие суммарную ошибку за счет действия помех и динамики изменения входных воздействий.
Математическое описание помех в системах управления
Представление о случайных процессах
Помехи в системах управления описываются методами теории случайных процессов.
Функция называется случайной, если в результате эксперимента она принимает тот или иной вид, заранее неизвестно, какой именно. Случайным процессом называется случайная функция времени. Конкретный вид, который принимает случайный процесс в результате эксперимента, называется реализацией случайного процесса.

Рис. 26
На рис. 26 показана совокупность нескольких (трех) реализаций случайного процесса x(1) (t), x(2) (t), x(3) (t). Такая совокупность называется ансамблем реализаций. При фиксированном значении момента времени t = t1 в первом эксперименте получим конкретное значение x(1) (t1), во втором – x(2) (t1) , в третьем – x(3) (t1).
Случайный процесс носит двойственный характер. С одной стороны, в каждом конкретном эксперименте он представлен своей реализацией – неслучайной функцией времени. С другой стороны, случайный процесс описывается совокупностью случайных величин.
Действительно, рассмотрим случайный процесс X (t) в фиксированный момент времени t = t1 . Тогда X (t1) в каждом эксперименте принимает одно значение ![]() , причем заранее неизвестно, какое именно. Таким образом, случайный процесс, рассматриваемый в фиксированный момент времени t = t1, является случайной величиной. Если зафиксированы два момента времени t1 и t2 , то в каждом эксперименте будем получать два значения х(t1) и х(t2) . При этом совместное рассмотрение этих значений приводит к системе (X(t1), X(t2)) двух случайных величин. При анализе случайных процессов в N моментов времени приходим к совокупности или системе N случайных величин (X(t1), …, X(tN)).
, причем заранее неизвестно, какое именно. Таким образом, случайный процесс, рассматриваемый в фиксированный момент времени t = t1, является случайной величиной. Если зафиксированы два момента времени t1 и t2 , то в каждом эксперименте будем получать два значения х(t1) и х(t2) . При этом совместное рассмотрение этих значений приводит к системе (X(t1), X(t2)) двух случайных величин. При анализе случайных процессов в N моментов времени приходим к совокупности или системе N случайных величин (X(t1), …, X(tN)).
Математическое ожидание, дисперсия и корреляционная функция случайного процесса
Поскольку случайный процесс, рассматриваемый в фиксированный момент времени, является случайной величиной, то можно говорить о математическом ожидании и дисперсии случайного процесса:
![]() ,
, ![]() .
.
Так же, как и для случайной величины, дисперсия характеризует разброс значений случайного процесса относительно среднего значения m(t). Чем больше D(t) , тем больше вероятность появления очень больших положительных и отрицательных значений процесса. Более удобной характеристикой является среднее квадратичное отклонение (СКО) ![]() , имеющее ту же размерность, что и сам случайный процесс.
, имеющее ту же размерность, что и сам случайный процесс.
Если случайный процесс описывает, например, изменение дальности до объекта, то математическое ожидание – средняя дальность в метрах; дисперсия измеряется в квадратных метрах, а Ско – в метрах и характеризует разброс возможных значений дальности относительно средней.
Среднее значение и дисперсия являются очень важными характеристиками, позволяющими судить о поведении случайного процесса в фиксированный момент времени. Однако, если необходимо оценить «скорость» изменения процесса, то наблюдений в один момент времени недостаточно. Для этого используют две случайные величины (X(t1), X(t2)), рассматриваемые совместно. Так же, как и для случайных величин, вводится характеристика связи или зависимости между X(t1)и X(t2). Для случайного процесса эта характеристика зависит от двух моментов времени t1 и t2 и называется корреляционной функцией:
![]() .
.
Стационарные случайные процессы
Многие процессы в системах управления протекают однородно во времени. Их основные характеристики не изменяются. Такие процессы называются стационарными. Точное определение можно дать следующим образом. Случайный процесс X(t) называется стационарным, если любые его вероятностные характеристики не зависят от сдвига начала отсчета времени. Для стационарного случайного процесса математическое ожидание, дисперсия и СКО постоянны: m(t) = m , D(t) = D= s 2.
Корреляционная функция стационарного процесса не зависит от начала отсчета t, т.е. зависит только от разности ![]() моментов времени:
моментов времени:
![]() .
.
Корреляционная функция стационарного случайного процесса имеет следующие свойства:
1) ![]() ; 2)
; 2) ![]() ; 3)
; 3) ![]() .
.
Часто корреляционные функции процессов в системах управления имеют вид, показанный на рис. 27.

Рис. 27.
Интервал времени ![]() , на котором корреляционная функция, т.е. величина связи между значениями случайного процесса, уменьшается в М раз, называется интервалом или временем корреляции случайного процесса. Обычно М=10 или М=е. Можно сказать, что значения случайного процесса, отличающиеся по времени на интервал корреляции, слабо связаны друг с другом.
, на котором корреляционная функция, т.е. величина связи между значениями случайного процесса, уменьшается в М раз, называется интервалом или временем корреляции случайного процесса. Обычно М=10 или М=е. Можно сказать, что значения случайного процесса, отличающиеся по времени на интервал корреляции, слабо связаны друг с другом.
Таким образом, знание корреляционной функции позволяет судить о скорости изменения случайного процесса.
Другой важной характеристикой является энергетический спектр случайного процесса. Он определяется как преобразование Фурье от корреляционной функции:
![]() .
.
Очевидно, справедливо и обратное преобразование:
![]() .
.
Энергетический спектр показывает распределение мощности случайного процесса, например помехи, на оси частот.
При анализе САУ очень важно определить характеристики случайного процесса на выходе линейной системы при известных характеристиках процесса на входе САУ. Предположим, что линейная система задана импульсной переходной характеристикой ![]() . Тогда выходной сигнал в момент времени
. Тогда выходной сигнал в момент времени ![]() определяется интегралом Дюамеля:
определяется интегралом Дюамеля:
![]() ,
,
где ![]() – процесс на входе системы. Для нахождения корреляционной функции
– процесс на входе системы. Для нахождения корреляционной функции ![]() запишем
запишем![]() и после перемножения найдем математическое ожидание
и после перемножения найдем математическое ожидание
![]() .
.
Таким образом, связь между корреляционными функциями входного и выходного случайных процессов устанавливается с помощью следующего двойного интеграла:
![]() .
.
Для стационарных процессов корреляционные функции зависят только от разности аргументов ![]() ,
, ![]() и поэтому
и поэтому
![]() .
.
Более простое соотношение можно найти для энергетических спектров ![]() и
и ![]() входного и выходного сигналов при известной передаточной функции
входного и выходного сигналов при известной передаточной функции ![]() линейной системы. Действительно, найдем преобразование Фурье от левой и правой частей последнего равенства. Получим следующее выражение:
линейной системы. Действительно, найдем преобразование Фурье от левой и правой частей последнего равенства. Получим следующее выражение:
![]() .
.
После замены переменной ![]() или
или ![]() тройной интеграл преобразуется в произведение
тройной интеграл преобразуется в произведение
 .
.
Поскольку преобразование Фурье от импульсной характеристики дает передаточную функцию, находим окончательно связь между энергетическими спектрами процессов на входе и на выходе линейной системы:
![]() .
.
Часто помехи в системах управления имеют очень широкий спектр. В таких случаях их удобно представить в виде так называемого белого шума – процесса с постоянным энергетическим спектром: G(w) = No. Корреляционная функция белого шума ![]() , где
, где ![]() (t) – импульсная дельта-функция. Это означает, что даже очень близкие по времени значения белого шума не связаны друг с другом.
(t) – импульсная дельта-функция. Это означает, что даже очень близкие по времени значения белого шума не связаны друг с другом.
Воздействие помех на системы управления
Рассмотрим воздействие помехи n(t) на замкнутую линейную систему управления (рис. 28). Будем предполагать, что нам известен энергетический спектр Gn (w) помехи.

Рис. 28
Найдем дисперсию ошибки, возникающей при действии помехи n(t). Для этого вначале определим энергетический спектр на выходе системы ![]() , где W(p) = H(p) / (1+H(p)) – передаточная функция замкнутой системы управления. После этого с помощью обратного преобразования Фурье можно найти корреляционную функцию помехи на выходе системы:
, где W(p) = H(p) / (1+H(p)) – передаточная функция замкнутой системы управления. После этого с помощью обратного преобразования Фурье можно найти корреляционную функцию помехи на выходе системы:
![]() .
.
Наконец, учитывая, что дисперсия ![]() , получаем окончательное выражение для дисперсии ошибки системы управления:
, получаем окончательное выражение для дисперсии ошибки системы управления: ![]()
Пример. Пусть на входе системы, содержащей один интегратор, например, в системе управления приводом, действует широкополосная помеха с энергетическим спектром G n (w) = N o. Передаточная функция системы с одним интегратором ![]() . Определим дисперсию ошибки, вызванной действием помехи. Для этого вначале запишем выражение для передаточной функции замкнутой системы
. Определим дисперсию ошибки, вызванной действием помехи. Для этого вначале запишем выражение для передаточной функции замкнутой системы ![]() и найдем квадрат ее модуля:
и найдем квадрат ее модуля: ![]() Энергетический спектр помехи на выходе рассматриваемой системы
Энергетический спектр помехи на выходе рассматриваемой системы
![]()
Таким образом, дисперсия ошибки САУ, вызванной действием помехи, находится по формуле:
![]()
Описание траекторий движения объектов с помощью случайных процессов
Входные сигналы САУ часто могут быть представлены с помощью типовых детерминированных воздействий. Например, движение объекта с известной постоянной скоростью определяется уравнением ![]() . Однако изменение входных сигналов во времени не всегда может быть задано с помощью известных детерминированных функций. Во многих случаях для более реалистичного описания, например, траектории движения самолета или корабля, необходимо использовать случайные процессы. При этом известная детерминированная составляющая входного сигнала может рассматриваться как математическое ожидание
. Однако изменение входных сигналов во времени не всегда может быть задано с помощью известных детерминированных функций. Во многих случаях для более реалистичного описания, например, траектории движения самолета или корабля, необходимо использовать случайные процессы. При этом известная детерминированная составляющая входного сигнала может рассматриваться как математическое ожидание ![]() случайного процесса:
случайного процесса:
![]() ,
,
где ![]() – стационарный случайный процесс с нулевым математическим ожиданием и корреляционной функцией
– стационарный случайный процесс с нулевым математическим ожиданием и корреляционной функцией ![]() .
.
Таким образом, второе слагаемое ![]() описывает неизвестный нам до эксперимента входной сигнал САУ в виде реализаций случайного процесса. Корреляционная функция этого случайного процесса позволяет задать дисперсию
описывает неизвестный нам до эксперимента входной сигнал САУ в виде реализаций случайного процесса. Корреляционная функция этого случайного процесса позволяет задать дисперсию ![]() и «среднюю скорость» изменения входного сигнала, связанную с интервалом корреляции процесса
и «среднюю скорость» изменения входного сигнала, связанную с интервалом корреляции процесса ![]() . На практике приближенные значения
. На практике приближенные значения ![]() и
и ![]() можно получить экспериментально, если в распоряжении разработчика системы имеется большое число N записей
можно получить экспериментально, если в распоряжении разработчика системы имеется большое число N записей ![]() , реальных входных сигналов. Математическое ожидание в этом случае оценивается средним арифметическим
, реальных входных сигналов. Математическое ожидание в этом случае оценивается средним арифметическим
![]() ,
,
Установившийся режим
Одной из самых частых ошибок связанных с подключением к интернету в Windows, является ошибка: «DNS-сервер не отвечает». При этом, пропадает доступ к интернету. На значке подключения скорее всего будет желтый треугольник, а в браузере, при попытке открыть сайт, вы скорее всего увидите ошибку «Не удается найти DNS-адрес», «err name not resolved «, или что-то в этом роде. Проблема эта вызвана сбоем в работе DNS-сервера, который отвечает за перенаправленные IP-адреса на домен. Если говорить о причинах возникновения этой ошибки, то виновником может быть как сам компьютер, так и маршрутизатор, или оборудование на стороне провайдера.
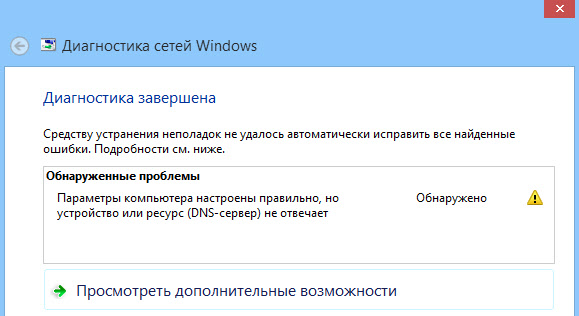
Сама ошибка «DNS-сервер не отвечает» появляется в результате диагностики сетей Windows. Запустить диагностику очень просто. Достаточно нажать правой кнопкой мыши на значок подключения к интернету, и выбрать «Диагностика неполадок».

Иногда, может появляться ошибка: «Параметры компьютера настроены правильно, но устройство или ресурс (DNS-сервер) не отвечает».
Вот такие ошибки. Если вы не знаете что делать, то сейчас мы рассмотрим несколько эффективных советов, которые должны помочь избавится от данных ошибок. В итоге, интернет на вашем компьютере заработает, и сайты начнут открываться. Решения будут одинаковыми для Windows 10, Windows 8, и Windows 7.
Обновление: для Windows 11 я подготовил отдельную статью: ошибка DNS-сервер не отвечает в Windows 11.
Как исправить ошибку «DNS-сервер не отвечает»?
Для начала, я советую выполнить несколько простых решений. Есть шанс, что они помогут, и вам не придется разбираться с более сложными настройками.
- Если у вас интернет подключен через роутер, или модем (по Wi-Fi, или по кабелю), и вы наблюдаете ошибку «DNS-сервер не отвечает», то попробуйте просто перезагрузить роутер. Отключите питание роутера где-то на минуту, и включите обратно. Не важно какой у вас роутер, TP-Link, D-link, ASUS, или еще какой-то.
- Перезагрузите свой компьютер, или ноутбук. В данном случае не важно, интернет у вас идет через роутер, или кабелем напрямую от провайдера. Просто выполните перезагрузку.
- Если интернет подключен через роутер, то проверьте, работает ли интернет на других устройствах. Нет ли там ошибки с ответом DNS-сервера.
- При подключении через маршрутизатор, если есть возможность, можно подключить интернет напрямую к компьютеру. Для проверки.
- Постарайтесь вспомнить, после чего появилась ошибка DNS, и проблемы с доступом к интернету. Может после смены каких-то настроек, или установки программ.
Если эти советы не помогли, то попробуйте применить решения, о которых я напишу ниже.
Проверяем службу DNS-клиент
Прежде чем что-то менять, я рекомендую посмотреть, работает ли служба «DNS-клиент». Нажмите на клавиатуре сочетание клавиш Win + R. В появившемся окне введите команду services.msc, и нажмите Ok.

В новом окне ищем службу «DNS-клиент», нажимаем на нее правой кнопкой мыши, и выбираем «Свойства».
Тип запуска должен быть «Автоматически». И если у вас кнопка «Запустить» будет активной, то нажмите на нее. Дальше: «Применить» и «Ok».

Если служба у вас была отключена, и вы ее включили, то после перезагрузки компьютера интернет должен заработать.
Меняем настройки DNS-серверов в свойствах подключения
Дальше мы проверим настройки DNS-серверов в свойствах подключения, через которое компьютер подключен к интернету. Если там прописаны какие-то адреса, то можно попробовать выставить автоматическое получение, либо прописать DNS-адреса от Google. Этот способ очень часто позволяет избавится от ошибки «DNS-сервер не отвечает».
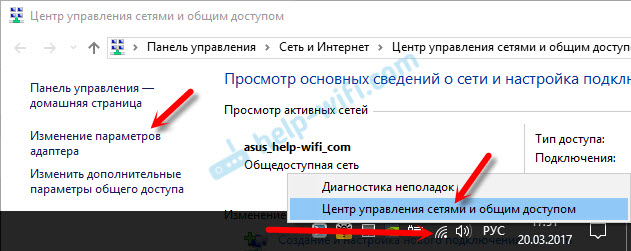
Нам нужно открыть окно со всеми подключениями. Для этого можно нажать правой кнопкой мыши на значок подключения к интернету, и выбрать «Центр управления сетями…». Дальше переходим в «Изменение параметров адаптера».
Дальше правой кнопкой мыши нажимаем на то подключение, через которое вы подключены к интернету (к роутеру), и выбираем «Свойства». Если подключение по Wi-Fi, то это подключение «Беспроводная сеть», если по кабелю, то «Ethernet» (Подключение по локальной сети).
У меня, например, проблема с DNS при подключении по Wi-Fi сети через роутер.

В новом окне выделите «IP версии 4 (TCP/IPv4)», и нажмите «Свойства». Если в новом окне у вас прописан какой-то DNS-сервер, то можно попробовать выставить автоматическое получение адресов, и проверить подключение к интернету после перезагрузки компьютера.
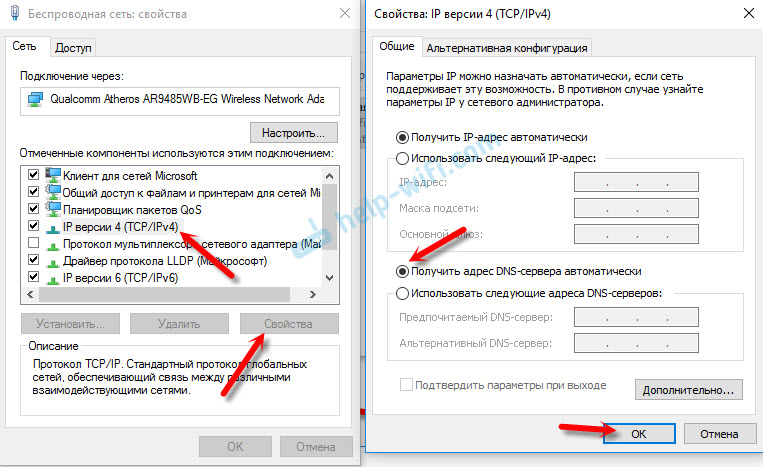
Но чаще всего помогает следующее: ставим переключатель возле «Использовать следующие адреса DNS-серверов», и прописываем DNS от Google:
8.8.8.8
8.8.4.4
Нажимаем «Ok» и перезагружаем компьютер.

Такое решение помогает очень часто. Если у вас проблема с получение DNS на всех устройствах, которые подключены через один роутер, то эти адреса можно прописать в настройках роутера, тогда они будут применяться для всех устройств. Как правило, сделать это можно в настройках вашего роутера, в разделе «Интернет», или «WAN». Где задаются параметры для подключения к провайдеру.
Для примера, покажу как это сделать на роутере TP-Link:

Не забудьте сохранить настройки.
Очищаем кэш DNS и другие сетевые параметры
Нужно просто запустить командную строку, и по очереди выполнить несколько команд, которые выполнять очистку кэша DNS-адресов, и других сетевых настроек. Этот способ подойдет как для Windows 10, так и для Windows 7 (8).
Командную строку нужно запустить от имени администратора. Если у вас Windows 10, то просто нажмите правой кнопкой мыши на меню пуск, и выберите «Командная строка (администратор)». В Windows 7, в поиске можно набрать «cmd», нажать правой кнопкой на «cmd» в результатах поиска, и выбрать «Запустить от имени администратора».
По очереди копируем и выполняем такие команды:
ipconfig /flushdns
ipconfig /registerdns
ipconfig /renew
ipconfig /release
Вот так:

В Windows 10 можно еще попробовать выполнить сброс сетевых настроек. Это практически то же самое.
После этого перезагрузите компьютер.
Обновление: отключаем или удаляем антивирус Avast
В комментариях Сергей написал, что ему помогло только удаление антивируса Avast. Если у вас установлен именно этот антивирус, то возможно он стал причиной того, что DNS-сервер перестал отвечать.
По своему опыту могу сказать, что антивирус Avast очень часто вмешивается в сетевые настройки Windows, из-за чего появляются разные проблемы с подключением к интернету. То интернет перестает работать после удаления антивируса, то ошибка DNS, или сетевой адаптер не имеет допустимых параметров настройки IP.
Можно попробовать для начала полностью остановить работу антивируса. Если это не решит проблему, то удалить его. Можно переустановить его, только без дополнительных модулей. Как это сделать, я писал в статье по ссылке выше (о решении проблемы с параметрами IP).
Что делать, если не получилось исправить ошибку?
Если вы все проделали правильно, но Windows по прежнему пишет что DNS-сервер не отвечает, то у меня есть еще пару советов:
- Смените статус сети с общественной на частную. У нас на сайте есть подробная инструкция.
- Попробуйте на время полностью отключить антивирус, или встроенный в него брандмауэр (веб-антивирус, сетевой экран).
- Если никак не можете исправить эту ошибку, то позвоните в поддержку своего интернет-провайдера. Не редко проблемы с DNS бывают по их вине.
Обязательно напишите, если у вас получилось избавится от этой ошибки. Напишите какой способ помог. Может у вас сработало какое-то другое решение, которого нет в статье. Ну и оставляйте свои отзывы в комментариях.
В
соответствии с четвёртой предпосылкой
МНК требуется, чтобы дисперсия остатков
была гомоскедастичной.
Это значит, что для каждого значения
фактора
![]() остатки
остатки![]() имеют одинаковую дисперсию
имеют одинаковую дисперсию![]() .
.
Если это условие применения МНК не
соблюдается, то имеет местогетероскедастичность.
В
качестве примера реальной гетероскедастичности
можно привести то, что люди с большим
доходом не только тратят в среднем
больше, чем люди с меньшим доходом, но
и разброс в их потреблении также больше,
поскольку они имеют больше простора
для распределения дохода.
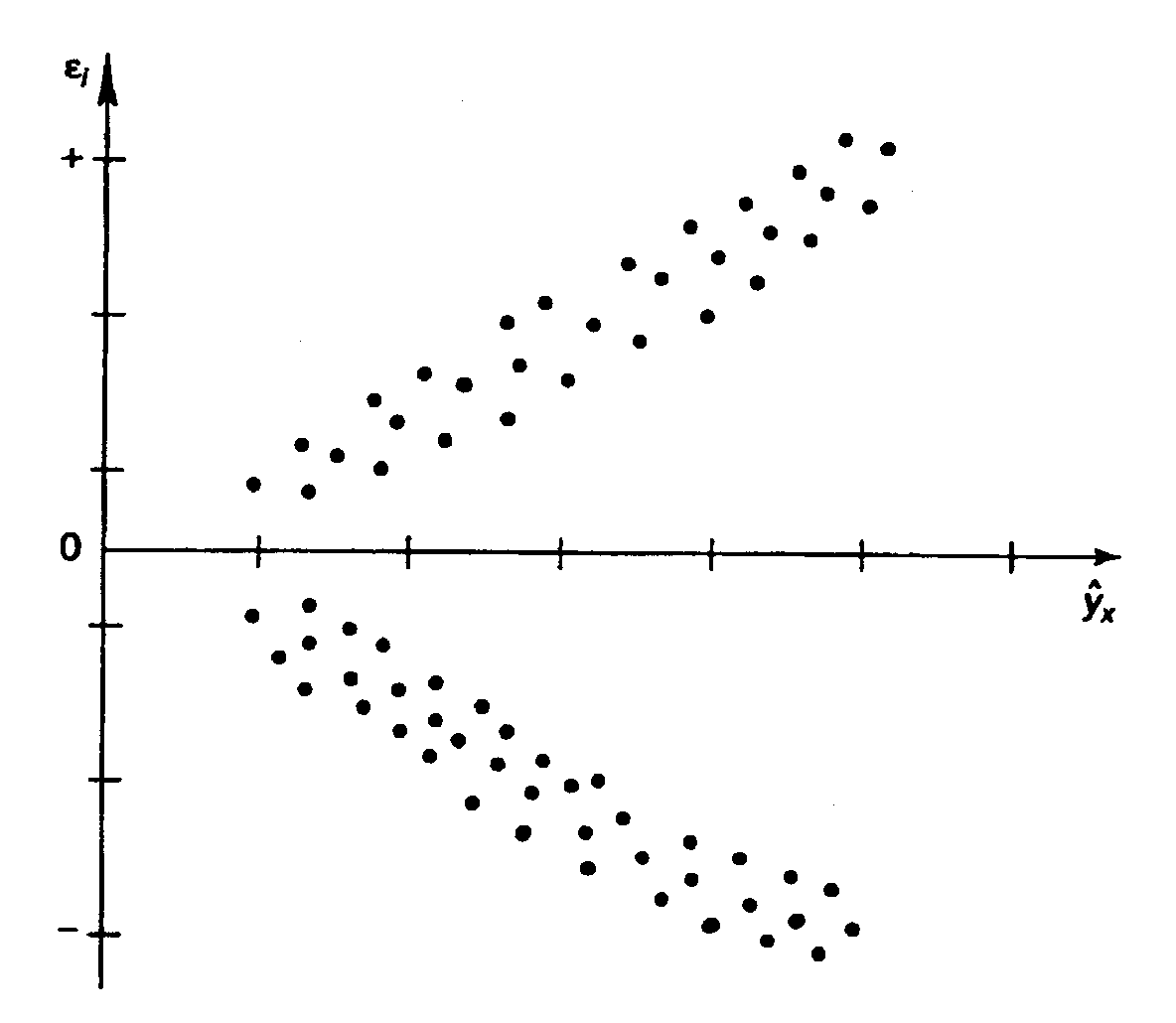
Наличие
гетероскедастичности можно наглядно
видеть из поля корреляции (- графический
метод
обнаружения гетероскедастичности).
|
(а) – дисперсия |
(б) – дисперсия |
(в)
– максимальная |



Наличие
гомоскедастичности или гетероскедастичности
можно видеть и по рассмотренному выше
графику зависимости остатков
![]() от теоретических значений результативного
от теоретических значений результативного
признака![]() .
.
|
(а‘) Гетероскедастичность: |
(б‘)
Гетероскедастичность, |
(в‘)
Гетероскедастичность, |
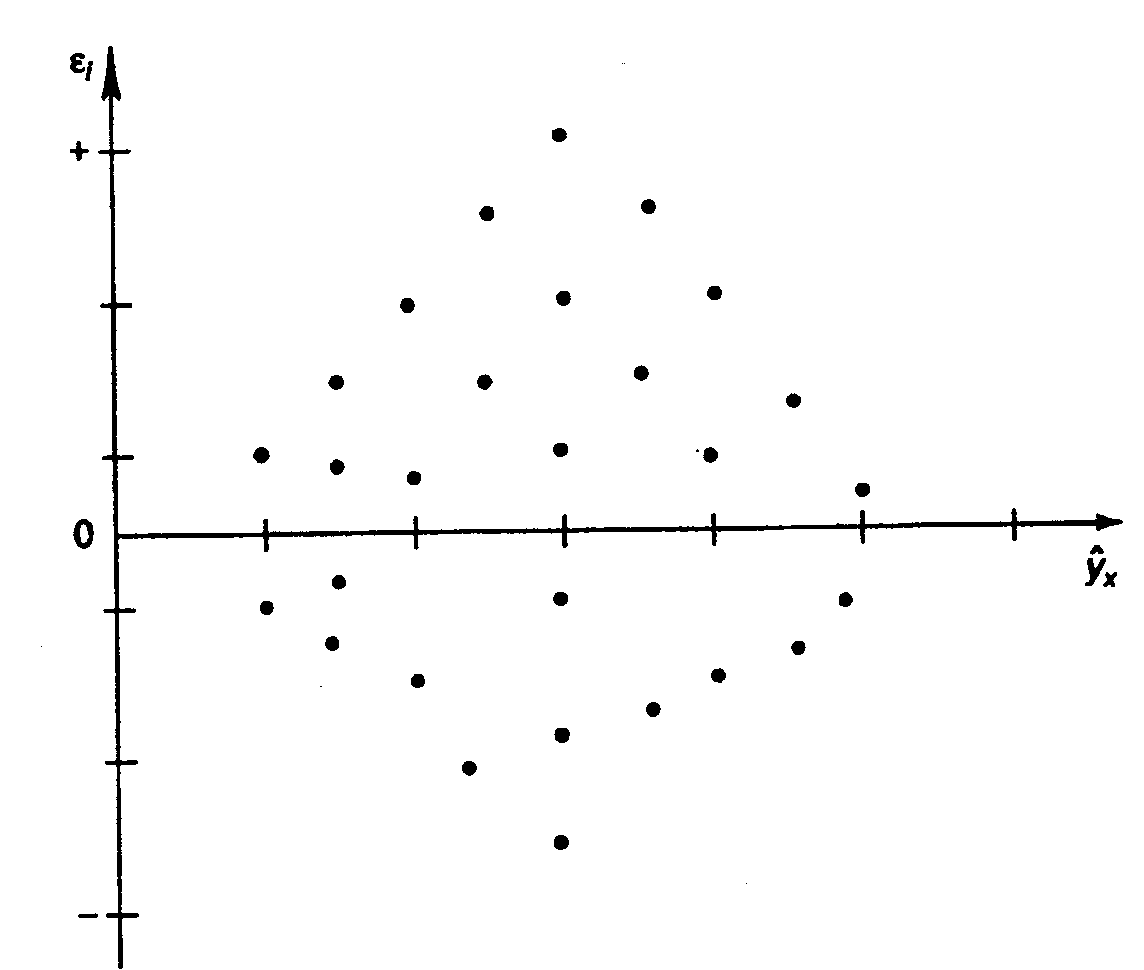

Для
множественной регрессии данный вид
графиков является наиболее приемлемым
визуальным способом изучения гомо- и
гетероскедастичности.
При
нарушении гомоскедастичности имеем
неравенства:
![]() ,
,
где![]() — постоянная дисперсия ошибки при
— постоянная дисперсия ошибки при
соблюдении предпосылки. Т.е. можно
записать, что дисперсия ошибки при![]() наблюдении пропорциональна постоянной
наблюдении пропорциональна постоянной
дисперсии:![]()
![]() .
.
![]() —
—
коэффициент
пропорциональности.
Он меняется при переходе от одного
значения фактора
![]() к другому.
к другому.
Задача
состоит в том, чтобы определить величину
![]() и внести поправку в исходные переменные.
и внести поправку в исходные переменные.
При этом используютобобщённый
МНК, который
эквивалентен обычному МНК, применённому
к преобразованным данным.
Чтобы
убедиться в обоснованности использования
обобщённого МНК проводят эмпирическое
подтверждение наличия гетероскедастичности.
При
малом объёме выборки, что наиболее
характерно для эмпирических исследований,
для оценки гетероскедастичности может
использоваться метод Гольдфельда-Квандта
(в 1965 г. они рассмотрели модель парной
линейной регрессии, в которой дисперсия
ошибок пропорциональна квадрату
фактора).
Пусть
рассматривается модель, в которой
дисперсия
![]() пропорциональна квадрату фактора:
пропорциональна квадрату фактора:
![]() ,
,
![]() .
.
А также остатки имеют нормальное
распределение и отсутствует автокорреляция
остатков.
Параметрический
тест (критерий) Гольдфельда – Квандта:
1.
Все n
наблюдений в выборке упорядочиваются
по величине x.
2.
Вся упорядоченная выборка разбивается
на три подвыборки (объёмом k,
С, k.)
![]() .
.
Исключаются из
рассмотрения С
центральных наблюдений. (По рекомендациям
специалистов, объём исключаемых данных
С
должен быть примерно равен четверти
общего объёма выборки n,
в частности, при
n =20, С=4;
при n
=30, С
= 8; при n
=60, С=16).
3.
Оцениваются отдельные регрессии для
первой подвыборки (k
первых наблюдений) и для последней
подвыборки (k
последних наблюдений).
4.
Определяются остаточные суммы квадратов
![]() для первой и второй
для первой и второй![]() групп.
групп.
Если предположение о пропорциональности
дисперсий отклонений значениямx
верно, то
![]() .
.
5.
Выдвигается нулевая гипотеза
![]() которая
которая
предполагает отсутствие гетероскедастичности.
Для проверки этой
гипотезы рассчитывается отношение
![]() ,
,
которое имеет распределение Фишера с![]() степеней свободы (здесьm
степеней свободы (здесьm
– число объясняющих переменных).
Если
![]() ,
,
то гипотеза об отсутствии гетероскедастичности
отклоняется при уровне значимостиα.
Этот же тест может
быть использован и при предположении
об обратной пропорциональности между
дисперсией и значениями объясняющей
переменной
![]() .
.
В этом случае статистика Фишера принимает
вид:
![]() .
.
При
установлении гетероскедастичности
возникает необходимость преобразования
модели с целью устранения данного
недостатка. Вид преобразования зависит
от того, известны или нет дисперсии
отклонений
![]() .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Правильные ответы выделены зелёным цветом.
Все ответы: Даны основы эконометрики и статистического анализа одномерных временных рядов.
Дисциплина эконометрика содержит следующие разделы
(1) моделирование данных, неупорядоченных во времени, теория временных рядов
(2) теория вероятностей и математическая статистика
(3) моделирование экономических процессов и прогнозирование ситуаций
(4) верны все вышеперечисленные варианты
Соответствие, максимальное приближение теоретических моделей к реальным производственно-экономическим процессам предполагает
(1) системность прогнозов
(2) адекватность поведения
(3) альтернативность прогнозирования
(4) все перечисленное
Сглаживание ряда называется центрированным при условии
(1) k = l + 3
(2) k = l
(3) k = l + 2
(4) k = l + 1
Для устранения трудностей построения уравнения регрессии при наличии коррелированности факторов и ошибок модели используют
(1) метод скользящей средней
(2) метод наименьших квадратов
(3) метод сглаживания
(4) метод инструментальных переменных
Построение моделей структуры средних позволяет
(1) проверить гипотезу о том, что матрица ковариации имеет определенный вид
(2) проверить корреляцию между факторами
(3) исследовать структуру средних одновременно с анализом дисперсий и ковариаций
(4) проанализировать корреляционную матрицу общих факторов
К критериям селекции относятся…
(1) критерий Шварца (SBC) и информационный критерий Акайке
(2) критерий Фишера и информационный критерий Акайке
(3) критерий Стьюдента
(4) критерий Стьюдента и информационный критерий Акайке
Стохастическая переменная с постоянной дисперсией называется
(1) основной
(2) гомоскедастической
(3) гетероскедастической
(4) явной
Тенденция к отрицанию гипотезы H0 возрастает по мере
(1) наличия связанных между собой нестационарных временных рядах
(2) увеличения объема выборки
(3) ошибочного обнаружения связей
(4) уменьшения объема выборки
Если при сборе данных об урожайности сельскохозяйственных структур результаты работы в отчетах занижаются, завышаются в зависимости от экономической политики или оцениваются «на глазок», то это объясняется
(1) неправильным выбором вида зависимости в уравнении
(2) отражением уравнением регрессии связи между агрегированными переменными
(3) невключением объясняющих переменных
(4) ошибками измерения
Матрица C = (XTX)-1, обратная матрице XTX, называется
(1) матрицей дисперсий-ковариаций или транспонированной матрицей случайного вектора Х
(2) транспонированной матрицей случайного вектора Х или ковариационной матрицей
(3) матрицей дисперсий-ковариаций или ковариационной матрицей
Каковы последствия гетероскедастичности в случая использования МНК для построения модели?
(1) результаты, основанные на анализе дисперсии коэффициентов, в случае гетероскедастичности применимы полностью
(2) результаты, основанные на анализе дисперсии коэффициентов, в случае гетероскедастичности неприменимы
(3) результаты, основанные на анализе дисперсии коэффициентов, в случае гетероскедастичности применимы в некоторых случаях
Впервые термин «эконометрия» ввел П. Цьемпа в
(1) 1980
(2) 1900
(3) 1910
(4) 1950
Величина Dx(t) характеризует
(1) квадрат колебаний значений процесса вокруг
(2) средний размах значений процесса
(3) размах квадрата колебаний значений процесса вокруг
(4) средний размах квадрата колебаний значений процесса вокруг mx(t)
Простейшим асимметричным фильтром является
(1) взвешенная средняя
(2) дисперсия
(3) скользящая средняя
(4) среднее квадратичное отклонение
Мультипликатор Кейнса характеризуется следующим высказыванием
(1) при увеличении объема инвестиций It на единицу совокупный выпуск возрастает на It единиц
(2) при уменьшении объема инвестиций It на единицу совокупный выпуск возрастает на 1/1-b единиц
(3) при увеличении объема инвестиций It на единицу совокупный выпуск возрастает на 1/1-b единиц
(4) при уменьшении объема инвестиций It на единицу совокупный выпуск возрастает на It единиц
Процесс структурного моделирования включает в себя следующие этапы
(1) все перечисленные этапы
(2) исследователь (пользователь) описывает (обычно с помощью диаграммы путей) модель, представляющую его понимание зависимостей между переменными
(3) программа проверяет, насколько хорошо полученные дисперсии и ковариации отвечают данной модели
(4) программа с помощью специальных внутренних методов определяет, какие значения дисперсий и ковариаций переменных получаются в текущей модели на основании входных данных
Для оценки так называемых моделей авторегрессии интегрированного скользящего среднего (АРИСС-моделей) применяют
(1) критерий Фишера
(2) критерий Стьюдента
(3) методологию Бокса — Дженкинса
(4) критерии Вальда — Вольфовица
В выражении для определения превышения доходности yt = mt + et, параметром mt обозначают
(1) ожидаемое превышение доходности от держания долгосрочных ценных бумаг
(2) непредсказуемые колебания показателей доходности долговременных рискованных ценных бумаг
(3) премию за риск, побуждающую избегающих риска агентов держать долгосрочные ценные бумаги
(4) белый шум
В случае если ряд содержит единичные корни и интегрирует с порядком d, он принадлежит классу
(1) I(d — b)
(2) I(d)
(3) CI(1,1)
(4) I(d + b)
Если регрессия значима, то
(1) Fнабл < Fкрит
(2) Fнабл > Fкрит
(3) Fнабл = Fкрит
К методам устранения мультиколлинеарности относятся
(1) все перечисленное верно
(2) методы, уменьшающие дисперсии оценок коэффициентов
(3) метод главных компонент
(4) метод гребневой регрессии (ридж-регрессии)
Обобщенная линейная модель множественной регрессии, теорема Айткена и обобщенный метод наименьших квадратов характерны для
(1) обоих методов устранения гетероскедастичности
(2) первого метода устранения гетероскедастичности
(3) второго метода устранения гетероскедастичности
Целью эконометрики как науки является
(1) разработка методов прогнозирования
(2) эмпирический анализ экономических законов
(3) разработка методик проведения социально-экономических исследований
(4) верны все вышеперечисленные варианты
Функция P(t) считается полностью определенной, если известны…
(1) все перечисленное
(2) частоты w = 2Пи/T
(3) период Т
(4) коэффициенты ряда Фурье
При сглаживании с помощью скользящей средней нет возможности получить сглаженные значения для
(1) свободного члена а полинома
(2) k первых и k последних членов ряда X(t)
(3) нечетных членов временного ряда
(4) k первых членов ряда X(t)
Число уравнений приведенной системы совпадает
(1) с числом экзогенных переменных
(2) с числом приведенных переменных
(3) с числом эндогенных переменных модели
(4) с числом составляющих переменных
Диаграммы путей используются для
(1) простого и изоморфного представления системы линейных уравнений
(2) составления сетевых графиков
(3) прогнозирования
(4) отражения причинных связей в наборе переменных
При q = 0 уравнение авторегрессии называется
(1) СС(q)-модель
(2) АРСС(p, q)-модель
(3) АРИСС(p, s, q)-моделью
(4) AP(q)-модель
Для определения превышения дохода от держания шестимесячной облигации (без учета квадратичных членов) можно использовать выражение
(1) yt = -0,0241 + 0,687ht + et
(2) yt = 2Rt — rt + 1 — rt
(3) yt = mt + et
(4) yt = 2Rt — rt
Следствием ложных корреляций являются
(1) образование новых стационарных переменных
(2) ложные связи между переменными
(3) образование детерминированных переменных времени
Значимость уравнения регрессии осуществляется по
(1) коэффициенту детерминации
(2) F-критерию Фишера
(3) по дисперсии
(4) все перечисленное
Предельными значениями коэффициента корреляции являются
(1) от 0 до +1
(2) от -1 до 0
(3) от -1 до + 1
Первый подход к решению проблемы гетероскедастичности
(1) предполагает такое преобразование данных, чтобы для них модель приобретала со временем свойство гетероскедастичности
(2) предполагает такое преобразование данных, чтобы для них модель уже обладала свойством гетероскедастичности
(3) состоит в построении моделей, учитывающих гетероскедастичность ошибок наблюдений
Исследование моделей по независимым неупорядоченным наблюдениям включает следующие этапы
(1) выявление тренда, лагов
(2) выделение зависимых и независимых переменных согласно некоторой экономической гипотезе
(3) проверка остатков на гетероскедастичность
(4) выявление циклической компоненты
Предварительную оценку случайности поведения остатков проводят на основе
(1) все перечисленное
(2) критерия поворотных точек
(3) критерия Пирсена
(4) критерия Стъюдента
Для уменьшения амплитуды колебаний у сглаженного ряда Y(t) необходимо
(1) увеличивать ширину интервала сглаживания m и проводить процедуру сглаживания повторно
(2) увеличивать ширину интервала сглаживания m либо проводить процедуру сглаживания повторно
(3) уменьшать ширину интервала сглаживания m
(4) все перечисленное не верно
Экзогенные переменные никогда не коррелируют
(1) с эндогенными переменными
(2) с ошибками модели
(3) с предопределенными переменными
(4) c лаговыми переменными
Явные переменные на путевых диаграммах указываются
(1) внутри овалов
(2) над стрелками
(3) внутри прямоугольников
(4) над дугами
Одним из априорных предположений при применении параметрических тестов для проверки стационарности является
(1) предположение о Пуассоновском законе распределения
(2) предположение о наличии корреляционных связей
(3) предположение о нормальном законе распределения значений временного ряда
(4) все перечисленное не верно
В выражении ln(yt) = a0 + a1ln(xt — 1) + et параметр et = ln et означает
(1) переменная уровня доходности
(2) белый шум
(3) слагаемое ошибок
(4) все перечисленное не верно
В процессе случайного блуждания используются переменные
(1) коррелированные нестационарные переменные
(2) некоррелированные нестационарные переменные
(3) стационарные переменные
(4) детерминированные переменные
Проверка значимости коэффициентов уравнения регрессии производится по
(1) критерию Фишера
(2) коэффициенту корреляции
(3) критерию Стьюдента
(4) коэффициенту детерминации
Если случайная величина является нормированной нормально распределенной величиной, то выполняется условие
(1) дисперсия равна нулю
(2) дисперсия равна единице
(3) все перечисленное
Устранение гетероскедастичности путем применения обобщенного метода наименьших квадратов (ОМНК) требует знания
(1) матрицы случайных ошибок
(2) матрицы ковариаций ошибок наблюдений
(3) матрицы систематических ошибок
(4) все перечисленное
Первой книгой, которую можно назвать эконометрической, была книга ученого
(1) Ф. Гальтона
(2) Дж. Э. Юла
(3) Г. Хукера
(4) Г. Мура
Уравнение кривой можно свести к многочлену посредством
(1) все перечисленное
(2) логарифмирования
(3) дифференцирования
(4) интегрирования
Сглаженный ряд короче исходного на величину
(1) k + l + 1
(2) k + 1
(3) 2k + 1
(4) k — l + 1
Коэффициент структурного уравнения системы называется идентифицируемым, если выполняются условия…
(1) существует не одна формула, связывающая этот коэффициент с коэффициентами приведенной формы
(2) коэффициент однозначно определяется с помощью косвенного метода наименьших квадратов
(3) коэффициент неоднозначно определяется с помощью косвенного метода наименьших квадратов
(4) все перечисленное
Путевые диаграммы наглядно показывают
(1) какие переменные являются значимыми
(2) какие переменные не вызывают изменения в других переменных
(3) какие переменные являются основными
(4) какие переменные вызывают изменения в других переменных
Для проверки условия стационарности ряда последовательность разбивается
(1) на два участка
(2) на три участка
(3) на четыре участка
(4) не разбивается
Коррелируют между собой следующие тренды
(1) нестационарные
(2) временные
(3) стационарные
(4) постоянные
Максимальное значение коэффициента детерминации равно
Для случая парной регрессии справедливым является выражение
(1) Qобщ = Qост — Qрегр
(2) Qобщ = Qост/Qрегр
(3) Qобщ = Qост + Qрегр
(4) все выражения
Ранг неслучайной (детерминированной) матрицы X предполагается равным
(1) p + 3 < n
(2) p + 2 < n
(3) p + 5 < n
(4) p + 1 < n
Начальным этапом применения теории эконометрики является
(1) прогнозирование экономической политики
(2) тестирование гипотез
(3) разработка теоретической модели экономической теории
(4) оценка модели
К приемам, позволяющим подобрать соответствующую (адекватную) действительности форму кривой, относятся…
(1) все перечисленное верно
(2) вычисление последовательных разностей
(3) визуальный
К экзогенным переменным относятся…
(1) все перечисленное
(2) денежная масса
(3) процентная ставка
(4) временной тренд
Третьим этапом структурного моделирования является следующий
(1) программа сообщает пользователю полученные результаты статистических испытаний, а также выводит оценки параметров и стандартные ошибки для численных коэффициентов в линейных уравнениях и одновременно выдает большое количество дополнительной диагностической информации
(2) программа проверяет, насколько хорошо полученные дисперсии и ковариации отвечают данной модели
(3) программа с помощью специальных внутренних методов определяет, какие значения дисперсий и ковариаций переменных получаются в текущей модели на основании входных данных
(4) исследователь (пользователь) описывает (обычно с помощью диаграммы путей) модель, представляющую его понимание зависимостей между переменными
К условиям стационарности модели относятся…
(1) однородное решение не должно быть равно нулю
(2) однородное решение должно быть равно нулю и характеристический корень а1 должен быть по абсолютной величине меньше 1
(3) однородное решение должно быть равно нулю и характеристический корень а1 не должен быть по абсолютной величине меньше 1
(4) однородное решение не должно быть равно нулю и характеристический корень а1 должен быть по абсолютной величине меньше 1
В динамическую модель могут входить следующие переменные
(1) детерминированные переменные
(2) зависимые переменные Y
(3) зависимые переменные X
(4) стационарные переменные
Коэффициент детерминации характеризует
(1) все перечисленное
(2) показатель сложности уравнения
(3) показатель качества построенного уравнения регрессии
(4) показатель выбора вида кривой
Для cov(bi, bj) справедливо следующее равенство
(1) cov(bi, bj) = M{(bi — M(bi))(bj — M(bj))} = M{(bi * bi)(bj * bj)}
(2) cov(bi, bj) = M{(bi — M(bi))(bj — M(bj))} = M{(bi + bi)(bj + bj)}
(3) cov(bi, bj) = M{(bi — M(bi))(bj — M(bj))} = M{(bi/bi)(bj/bj)}
(4) cov(bi, bj) = M{(bi — M(bi))(bj — M(bj))} = M{(bi — bi)(bj — bj)}
Существуют следующие подходы к решению проблемы гетероскедастичности…
(1) все перечисленное
(2) применение обобщенного метода наименьших квадратов
(3) применение взвешенного метода наименьших квадратов
(4) преобразование данных
Эконометрика как отрасль науки возникла на стыке
(1) четырех дисциплин
(2) двух дисциплин
(3) трех дисциплин
(4) пяти дисциплин
Ряды имеют «долговременную память» если убывание коэффициента корреляции носит…
(1) степенной или линейный характер
(2) экспоненциальный или линейный характер
(3) экспоненциальный или степенной характер
(4) все перечисленное не верно
В кейнсианской модели переменная It называется
(1) составляющими переменными
(2) экзогенной переменной
(3) приведенными переменными
(4) экзогенными переменными
Четвертым этапом структурного моделирования является следующий
(1) программа с помощью специальных внутренних методов определяет, какие значения дисперсий и ковариаций переменных получаются в текущей модели на основании входных данных
(2) программа сообщает пользователю полученные результаты статистических испытаний, а также выводит оценки параметров и стандартные ошибки для численных коэффициентов в линейных уравнениях и одновременно выдает большое количество дополнительной диагностической информации
(3) программа проверяет, насколько хорошо полученные дисперсии и ковариации отвечают данной модели
Гипотеза о постоянстве математического ожидания временного ряда принимается в случае
(1) все перечисленное
(2) Tнабл < Tтабл(a, n1 + n2 — 2)
(3) Tнабл = Tтабл(a, n1 + n2 — 2)
(4) Tнабл > Tтабл(a, n1 + n2 — 2)
Временной тренд может быть исключен из результирующей переменной путем
(1) построения регрессии этой переменной по времени
(2) путем введения времени в качестве одной из переменных-регрессоров
(3) перехода к остаткам, свободных от тренда
Перечислите основные причины отклонений от прямой регрессии
(1) верны все перечисленные варианты
(2) отражение уравнением регрессии связи между агрегированными переменными
(3) неправильный выбор вида зависимости в уравнении
(4) ошибки измерения
Система нормальных МНК-уравнений позволяет
(1) осуществлять прогнозную оценку процесса выраженного уравнением регрессии
(2) оценивать оптимальное значение функци
(3) все перечисленное
(4) оценивать коэффициенты b0, b1, b2, …, bk уравнения регрессии
Тесты для определения наличия гетероскедастичности основаны на
(1) предположении о наличии значимых факторов в моделях
(2) предположении о наличии связи между дисперсиями остатков моделей и объясняющими переменными
(3) предположении о наличии значимых коэффициентов регрессии
(4) предположении об отсутствии связи между дисперсиями остатков моделей
Основными характеристиками случайного процесса являются…
(1) все перечисленное
(2) автокорреляционная функция
(3) дисперсия
(4) математическое ожидание
Одной из причин корреляции между факторами и ошибками уравнения регрессии является
(1) неправильный выбор факторов
(2) неправильный выбор вида уравнения регрессии
(3) неправильное измерение объясняющих переменных
(4) в модель подставляются не истинные, а искаженные наблюдения
Основными задачами, для решения которых используются структурные уравнения, являются…
(1) все перечисленное верно
(2) подтверждающий факторный анализ
(3) причинное моделирование, или анализ путей
(4) факторный анализ второго порядка
Гипотеза о постоянстве дисперсии проверяется
(1) по критерию Вальда — Вольфовица
(2) по параметрическим тестам
(3) все перечисленное
(4) по критерию Фишера
Большие значения, близкие к 1, величины (1 — а1) модели корректировки ошибок (МКО) свидетельствуют о том, что
(1) МКО обладает иммунитетом к ложной регрессии
(2) экономические факторы сильно изменяют результат
(3) контроль и достижение долговременной стабилизации происходят медленно
Впервые термин «регрессия» ввел
(1) Дж. Э. Юл
(2) Г. Хукер
(3) Ф. Гальтон
(4) Р. Фриш
Критерий Шварца и критерий Акайке применяют
(1) все перечисленное
(2) если точная спецификация модели неизвестна
(3) если точная спецификация модели не существует
(4) если точная спецификация модели известна
Какие вопросы решают при исследовании моделей?
(1) все перечисленное
(2) как решать проблему гетероскедастичности
(3) какие следствия для оценок, получаемых по методу наименьших квадратов, влечет гетероскедастичность
(4) как правильно провести диагностику существования гетероскедастичности
При построении прогнозных моделей могут использоваться следующие методы…
(1) все перечисленное верно
(2) метод минимизации суммы модулей
(3) регрессионные методы
(4) методы распознавания образов
Нулевая гипотеза при использовании теста Чоу состоит в предположении
(1) все перечисленное
(2) о неравенстве истинных соответствующих параметров регрессии для всех моделей
(3) о равенстве истинных соответствующих параметров регрессии для всех моделей
В случае включения в модель нескольких качественных факторов необходимо выполнение следующих условий…
(1) чтобы в информационной матрице X скалярные произведения столбцов, отвечающих за качественные переменные, были равны нулю
(2) включаемые факторы не были линейно независимы
(3) в информационной матрице X скалярные произведения столбцов, отвечающих за качественные переменные, были равны единице
(4) все перечисленное верно
Для математического ожидания матрицы, элементами которой являются центрированные случайные величины, должно соблюдаться условие
(1) M(XiXj) < cov(Xi,Xj)
(2) M(XiXj) > cov(Xi,Xj)
(3) M(XiXj) = cov(Xi,Xj)
Укажите дисциплины, использующие математические методы применительно к экономике
(1) информатика
(2) многомерный статистический анализ данных, математические методы в экономике
(3) естествознание
(4) социология
К основным принципам разработки прогнозов относится
(1) многозадачность, устойчивость
(2) надежность, массовость, дискретность
(3) системность, адекватность, альтернативность
(4) все перечисленное
Число значений исходного ряда, одновременно участвующих в сглаживании, называется
(1) граничными значениями интервала сглаживания
(2) диапазоном интервала сглаживания
(3) шириной интервала сглаживания
(4) длиной интервала сглаживания
Ошибка наблюдения в модели случае, когда подставляются не истинные, а искаженные наблюдения, состоит
(1) из одного слагаемого
(2) из трех слагаемых
(3) из двух слагаемых
(4) из четырех слагаемых
Моделирование ковариационной структуры позволяет
(1) проанализировать корреляционную матрицу общих факторов
(2) проверить корреляцию между факторами
(3) проверить гипотезу о равенстве дисперсий у всех переменных
(4) проверить гипотезу о том, что матрица ковариации имеет определенный вид
По обучающей выборке определяются следующие числовые характеристики временного ряда
(1) модифицированную последовательность ковариаций
(2) автоковариации и автокорреляционные функции
(3) параметры скользящего среднего
(4) все перечисленное
Ключевым моментом в ОАРУГ-моделях являются
(1) АКФ квадраты остатков, позволяющие идентифицировать порядок ОАРУГ-процесса
(2) АКФ и ЧАКФ остатки
(3) возмущения {yt}-последовательности, образующие АРСС-процесс
(4) возмущения {yt}-последовательности, образующие ОАРУГ-процесс
Результативным признаком в регрессионном анализе называют
(1) фактором
(2) независимую переменную
(3) зависимую переменную
Для установления значимости факторов в шаговой регрессии используют следующие методы
(1) все перечисленное верно
(2) метод включения факторов
(3) метод исключения факторов
(4) комбинированный метод
В обобщенной линейной модели множественной регрессии дисперсии и ковариации ошибок наблюдений
(1) не произвольные
(2) всегда постоянны
(3) могут быть произвольными
Эконометрика как отрасль науки возникла на стыке следующих дисциплин
(1) политологии, социологии, психологии
(2) экономической теории, методов математического анализа, математической статистики
(3) информатики, теории анализа, естествознания
(4) математической статистики, информатики
С увеличением запаздывания объем выборки, по которой вычисляется коэффициент корреляции
(1) остается без изменения
(2) увеличивается
(3) уменьшается
Асимметричные фильтры используются для
(1) сглаживания временных рядов
(2) прогнозирования временных рядов
(3) усреднения временных рядов
(4) все перечисленное
Если система уравнений помимо экзогенных и эндогенных переменных содержит еще и значения эндогенных переменных, полученные в предыдущие периоды времени, то такие значения называют
(1) составляющим переменными
(2) лаговыми переменными
(3) приведенными переменными
(4) экзогенными переменными
Если набор чисел X связан с другим набором чисел Y зависимостью Y = 4X, то дисперсия Y должна быть
(1) в 32 раза больше, чем дисперсия X
(2) в 16 раз больше, чем дисперсия X
(3) в 64 раза больше, чем дисперсия X
(4) в 4 раза больше, чем дисперсия X
Для проверки постоянства математического ожидания используют
(1) тест Сиджела — Тьюки
(2) критерий Фишера
(3) тест Манна — Уитни
(4) критерий Стьюдента
Модель, одновременно оценивающую среднее и дисперсию ряда, предложил
(1) Р. Фриш
(2) Р. Энгл
(3) Л. Клейн
(4) В. Джакоб
Для определения числа степеней свободы для суммы квадратов используют выражение
(1) n — 4
(2) n — 5
(3) n — 3
(4) n — 2
К методам смягчения мультиколлинеарности относятся
(1) отбор из множества объясняющих переменных тех переменных, которые имеют наиболее низкие взаимные коэффициенты корреляции
(2) радикальное увеличение числа опытов
(3) уменьшение дисперсии остатков путем введения упущенной в первоначальной модели важной переменной
(4) все перечисленное
В чем заключается второй подход к решению проблемы гетероскедастичности?
(1) в таком преобразовании данных, чтобы для них модель уже обладала свойством гетероскедастичности
(2) в построении моделей, учитывающих гетероскедастичность ошибок наблюдений
(3) в таком преобразовании данных, чтобы для них модель не обладала свойством гетероскедастичности
(4) все перечисленное
Выявление трендов, лагов, циклической компоненты определяются при проведении исследований
(1) моделей прогнозирования
(2) моделей по независимым неупорядоченным наблюдениям
(3) моделей временных рядов
Задачей гармонического анализа является определение основных гармонических колебаний, входящих в
(1) непериодическую составляющую q(t)
(2) периодическую составляющую ряда P(t)
(3) погрешность ряда e(t)
(4) все перечисленное
В случае если сглаживание происходит на основе уравнения параболы, составляется система m уравнений
(1) m = 2k + 2
(2) m = 2k — 1
(3) m = 2k + 1
(4) m = 2k — 2
Коэффициент b в упрощенной кейнсианской модели формирования доходов в закрытой экономике без государственного вмешательства называют
(1) ликвидными средствами
(2) скрытыми затратами
(3) неликвидными средствами
(4) склонностью к потреблению
Латентными переменными называются
(1) явные переменные
(2) значимые переменные
(3) скрытые переменные, которые нельзя непосредственно измерить
(4) незначимые переменные
Сериальный критерий стационарности применяется для
(1) проверки стационарности коэффициентов модели
(2) проверки стационарности временного ряда
(3) проверки стационарности переменных
Превышение доходности yt от держания рискованных ценных бумаг над государственными облигациями, рассчитанными на погашение в течение одного периода времени, принятого за единицу, определяется выражениием
(1) Mt — 1yt = mt
(2) yt = 2Rt — rt + 1 — rt
(3) yt = mt + et
(4) yt = -0,0241 + 0,687ht + et
Для оценки параметров a, b уравнения регрессии применяют метод
(1) метод правдоподобия
(2) наименьших квадратов (МНК)
(3) метод корректировки ошибок
Показателем статистической связи между двумя переменными является
(1) частный коэффициент ковариации
(2) частный коэффициент детерминации
(3) частный коэффициент корреляции
Сколько существует основных подходов к решению проблемы гетероскедастичности?
(1) два
(2) один
(3) три
(4) четыре
За вклад в развитие эконометрической науки присуждены Нобелевские премии следующим ученым
(1) К. Гауссу, П. Лапласу
(2) Дж. Боксу, Г. Дженкинсу
(3) Р. Фришу, Я. Тинбергену
(4) Р. Фришу, К. Гауссу
Выравнивание считается удовлетворительным, если остатки e(t) образуют стационарный процесс
(1) с математическим ожиданием m e(t) = M[e(t)] = бесконечность
(2) с математическим ожиданием m e(t) = M[e(t)] = 1
(3) с нулевым математическим ожиданием m e(t) = M[e(t)] = 0
Для удобства сопоставления сглаженного и исходного рядов ширину интервала сглаживания чаще выбирают исходя из условия
(1) m = 2k + 3
(2) m = 2k + 2
(3) m = 2k + 4
(4) m = 2k + 1
Необходимое условие идентификации формулируется следующим образом: коэффициенты уравнения идентифицируемы
(1) при k + 1 > r
(2) при k + 1 < r
(3) при k + 1 = r
Однозначное отображение, сохраняющее структуру модели, называется
(1) гетероморфизмом
(2) стереоморфизмом
(3) изоморфизмом
(4) все перечисленное
Для АР(1)-модели частные автокорреляционные функции между yt и yt — 2 равны
(1) единице
(2) бесконечности
(3) нулю
(4) равны между собой
Одним из методов прогнозирования дисперсии является
(1) введение последовательных значений xt
(2) введение независимой переменной
(3) линеаризация модели
Уровень надежности равный 0,95 характеризует
(1) 5%-ный уровень надежности прогноза
(2) 95%-ный уровень надежности прогноза
Если случайная величина является нормированной нормально распределенной величиной, то выполняется условие
(1) математическое ожидание равно 1
(2) математическое ожидание равно 0
Для проверки ошибок модели на гомоскедастичность используют
(1) тест Голдфелда — Квандта
(2) метод Гаусса — Маркова
(3) критерий Спирмена
(4) все перечисленное не верно
Закон, в котором выяснялись закономерности спроса на основе соотношений между урожаем зерновых и ценами на зерно, носит название
(1) закон Л. Клейна
(2) закон Г. Люсака
(3) закон Р. Фриша
(4) закон Кинга
Корреляционным полем временного ряда X(t) называется
(1) множество точек M(X(t)) на плоскости (t, OX)
(2) множество точек Dx(t) на плоскости (t, OX)
(3) множество точек (t, X(t)) на плоскости (t, OX)
(4) множество точек (Dx, X(t)) на плоскости (t, OX)
Как обычно называют сглаживание временного ряда?
(1) оператором
(2) фильтром
(3) фильтрованием
(4) все перечисленное верно
Возможность нескольких вариантов расчета структурных коэффициентов кейнсианской модели называется
(1) неидентифицируемостью
(2) идентифицируемостью
(3) сверхидентифицируемостью
(4) все перечисленное не верно
Каждая связь диаграммы путей включает в себя
(1) все перечисленное
(2) две переменные
(3) не менее пяти переменных
(4) четыре переменные
Возможность получения оценок по одной реализации процесса называется
(1) стохастичность
(2) стационарность
(3) автокорреляция
(4) эргодичность
Коэффициент детерминации определяется выражением
(1) D(Y) = D(Y1 + e) = D(Y1) + D(e) + 2cov(Y1,e)
(2) R2 = D(Y1)/D(Y)
(3) D(Y) = D(a + bx) + D(e)
При хорошем качестве построенной модели средняя относительная ошибка аппроксимации составляет
(1) 24–29%
(2) 14-19%
(3) 34–39%
(4) 4–9%
Согласно теореме Гаусса — Маркова случайные возмущения…
(1) коррелированы друг с другом
(2) не коррелированы друг с другом,имеют постоянную дисперсию
(3) имеют дисперсии равные единице
(4) все перечисленное
Одним из первых количественных законов стал закон
(1) закон Дж. Кларка
(2) закон Л. Клейна
(3) закон Кинга
(4) закон Р. Фриша
Процесс выделения тренда (выравнивание ряда) включает следующие этапы…
(1) определение числовых значений параметров кривой
(2) выбор типа кривой, соответствующей характеру изменения ряда
(3) оценка качества подобранной модели тренда
(4) все перечисленное верно
В кейнсианской модели переменные Yt и Сt называются
(1) приведенной переменной
(2) экзогенной переменной
(3) составляющей переменной
(4) эндогенными переменными
Вторым этапом структурного моделирования является следующий
(1) программа проверяет, насколько хорошо полученные дисперсии и ковариации отвечают данной модели
(2) исследователь (пользователь) описывает (обычно с помощью диаграммы путей) модель, представляющую его понимание зависимостей между переменными
(3) программа сообщает пользователю полученные результаты статистических испытаний, а также выводит оценки параметров и стандартные ошибки для численных коэффициентов в линейных уравнениях и одновременно выдает большое количество дополнительной диагностической информации
(4) программа с помощью специальных внутренних методов определяет, какие значения дисперсий и ковариаций переменных получаются в текущей модели на основании входных данных
Автоковариации предельных значений yt
(1) конечны и не зависят от времени
(2) конечны и зависят от времени
(3) бесконечные
(4) бесконечные и не зависят от времени
Укажите все ограничения на поведение случайного слагаемого e в условиях Гаусса — Маркова, выполнение которых предполагается при использовании для оценки коэффициентов модели метода наименьших квадратов
(1) все перечисленное верно
(2) для всех i = 1, 2, 3, …, n случайные ошибки ei распределены по нормальному закону, а x = (x1, x2, … xn) — фиксированный вектор
(3) ошибки модели ei при разных наблюдениях независимы
(4) нулевое математическое ожидание, М(ei) = 0, i = 1, 2, …, n
При оценке математических ожиданий справедливо следующее
(1) My = M(Xb + e) = M(Xb) + M(e) = -M(Xb) = -Xb
(2) My = M(Xb + e) = M(Xb) + M(e) = M(Xb) = Xb
(3) My = M(Xb + e) = M(Xb)/M(e) = M(Xb) = Xb
(4) My = M(Xb + e) = M(Xb) — M(e) = M(Xb) = Xb
Тест ранговой корреляции Спирмена не требует предположения о
(1) нормальности распределения коэффициента корреляции
(2) нормальности распределения регрессоров
(3) нормальности распределения регрессионных остатков
(4) все перечисленное неверно
Впервые термин «эконометрия» ввел
(1) Л. Клейн
(2) Р. Фриш
(3) П. Цьемпа
(4) В. Джакоб
Коррелограмма показывает убывание положительных rl при возрастании l в случаях…
(1) ряд имеет относительно небольшие колебания вокруг тренда
(2) если ряд имеет тренд
(3) существует явная зависимость между прошлым и будущим ряда
(4) все перечисленное верно
В кейнсианской модели переменная It формируется под воздействием…
(1) внешних факторов и политической надстройки
(2) внутренних факторов и политической надстройки
(3) внутренних факторов
(4) все перечисленное
Подтверждающий факторный анализ используется…
(1) для анализа корреляционной матрицы общих факторов
(2) проверки гипотезы о равенстве дисперсий у всех переменных
(3) все перечисленное
(4) для проверки определенных гипотез о структуре факторных нагрузок
Гипотеза о постоянстве дисперсии принимается при условии
(1) Fрасч > Fтабл(a, n1 — 1, n2 — 1), (a — уровень значимости)
(2) Fрасч = Fтабл(a, n1 — 1, n2 — 1), (a — уровень значимости)
(3) Fрасч < Fтабл(a, n1 — 1, n2 — 1), (a — уровень значимости)
(4) во всех случаях
Простейшая регрессионная модель имеет вид
(1) Y = a2 + bx2
(2) Y = a + bx + e
(3) Y = a — bx
(4) Y =(a/bx) + e
при использовании метода наименьших квадратов (МНК) минимизируется
(1) произведение остатков модели
(2) разность квадратов остатков модели
(3) сумма квадратов остатков модели
(4) произведение квадратов остатков модели
Для определения наличия гетероскедастичности применяют
(1) наблюдения
(2) эксперименты
(3) тесты
(4) расчеты
Анализ временных рядов проводится
(1) методами распознавания образов
(2) методами теории случайных процессов
(3) методами кластерного анализа
(4) методом наименьших квадратов
К причинам возникновения в экономических моделях зависимости между объясняющими переменными Xiu и случайными ошибками eu относится и такая
(1) один из факторов может влиять на поведение объясняющей переменной
(2) один из факторов может одновременно влиять на поведение случайной ошибки и объясняющей переменной
(3) один из факторов может влиять на поведение случайной ошибки
(4) один из факторов не может одновременно влиять на поведение случайной ошибки и объясняющей переменной
Техника моделирования структурными уравнениями основывается на…
(1) все перечисленное верно
(2) факторном анализе
(3) множественной регрессии
(4) многомерном анализе
При априорном предположении о нормальном законе распределения значений временного ряда применяют
(1) критерий Фишера
(2) методологию Бокса — Дженкинса
(3) критерий Стьюдента
(4) параметрические тесты проверки стационарности
Зависимую переменную в регрессионном анализе называют
(1) регрессором
(2) предиктором
(3) результативным признаком
Включение несущественной переменной в модель оказывает следующие последствия
(1) вызывает рост стандартных ошибок коэффициентов
(2) оценки становятся статистически незначимыми
(3) не приводит к смещению оценок коэффициентов
(4) все перечисленное верно
Предположение о том, что ошибки ei наблюдений имеют разные дисперсии, называется
(1) гомоскедастичностью наблюдений
(2) регрессией наблюдений
(3) гетероскедастичностью
(4) ковариацией наблюдений
Основным содержанием ПЭП является…
(1) выявления объективных условий, факторов и тенденций развития
(2) количественный анализ реальных экономических процессов
(3) качественный анализ реальных экономических процессов
(4) все перечисленное верно
При использовании Теста Чоу строятся следующие регрессионные модели
(1) по всей выборке наблюдений
(2) по наблюдениям после происшедших изменений в структуре связей
(3) по наблюдениям, проведенным до изменений
(4) все перечисленное верно
Фиктивные переменные позволяют
(1) строить модели для исследования будущих структурных изменений
(2) строить модели для исследования случайных изменений
(3) все перечисленное
(4) строить модели для исследования структурных изменений
Стандартная процедура регрессионного анализа, выполняемого на основе метода наименьших квадратов, требует выполнения условий
(1) Стьюдента
(2) Гаусса — Маркова
(3) Фишера
(4) Гаусса
Для чего используются эконометрические методы
(1) верны все перечисленные варианты
(2) для прогнозирования в финансах
(3) для прогнозирования в банковском деле
(4) для прогнозирования в бизнесе
Коррелограммой называют
(1) значения M(X(t)), нанесенные на плоскость с осями i и r и соединенные ломаной
(2) все перечисленное
(3) значения Dx(t), нанесенные на плоскость с осями i и r и соединенные прямой
(4) значения ri, нанесенные на плоскость с осями i и r и соединенные ломаной
Причинные модели могут включать
(1) эндогенные переменные
(2) явные переменные и латентные переменные
(3) экзогенные переменные и латентные переменные
(4) явные переменные и эндогенные переменные
В случае, когда в модель не включена существенная переменная, наблюдаются следующие последствия
(1) коэффициенты при оставшихся переменных становятся смещенными
(2) стандартные ошибки коэффициентов и t-статистики некорректны
(3) исчезает возможность правильной оценки и интерпретации уравнений
(4) все перечисленное
Укажите случайную составляющую выражения Y(t) = q(t) + P(t) + e(t)
(1) P(t) — периодическая составляющая
(2) q(t) — непериодическая составляющая
(3) e(t) — погрешность ряда
(4) все перечисленное верно
Сглаживание является центрированным и симметричным при условии
(1) а — r = ar + 1
(2) а — r = a/r
(3) а — r = ar — 1
(4) а — r = ar
Латентные переменные указываются
(1) над стрелками
(2) внутри прямоугольников
(3) над дугами
(4) внутри овалов или окружностей
При значениях k близких к объему выборки N можно получить следующее значение Rвыб в квадрате
(1) близкое к нулю
(2) близкое к единице
(3) все перечисленное
Временной ряд — это
(1) значения величины X(t), расположенные в определенной последовательности
(2) последовательности значений случайной величины X
(3) последовательность значений случайной величины X(t)
(4) последовательности значений случайной величины t
Техника моделирования структурными уравнениями в пакете STATISTICA имеет аббревиатуру
(1) PATH
(2) SEPA
(3) SEPATH
(4) ATH
Теорема Гаусса — Маркова предполагает
(1) все перечисленное верно
(2) нулевую корреляцию между e и Хi
(3) некоррелированность случайного члена и регрессоров
Предположение о том, что ошибки ei наблюдений имеют одинаковые дисперсии, называется
(1) регрессией наблюдений
(2) гомоскедастичностью наблюдений
(3) ковариацией наблюдений
(4) гетероскедастичностью наблюдений
Для уменьшения амплитуды колебаний у сглаженного ряда Y(t) необходимо
(1) уменьшать ширину интервала сглаживания m
(2) увеличивать ширину интервала сглаживания m
(3) сокращать количество определяющих переменных
(4) увеличивать количество определяющих переменных
Структурные модели с линейными зависимостями являются
(1) прогнозными
(2) точными
(3) приближенными
Для проверки стационарности временного ряда применяют
(1) критерий Фишера
(2) сериальный критерий стационарности
(3) тест Сиджела — Тьюки
(4) тест Манна — Уитни
Проверка значимости коэффициентов уравнения регрессии производится по
(1) критерию Уитни
(2) критерию Стьюдента
(3) коэффициенту корреляции
(4) коэффициенту детерминации
Нулевая гипотеза о незначимости уравнения регрессии отвергается и принимается гипотеза о значимости уравнения регрессии, если
(1) Fнабл =Fкрит(a, nрегр, nост)
(2) Fнабл < Fкрит(a, nрегр, nост)
(3) во всех случаях
(4) Fнабл > Fкрит(a, nрегр, nост)
Коэффициент a в выражении Y(t) = Y(t — 1) + a(X(t) — Y(t — 1) является
(1) коэффициентом поправки на систематические ошибки
(2) коэффициентом поправки на «новизну»
(3) коэффициентом поправки на неучтенные факторы
(4) все перечисленное не верно
Всегда ли построенные зависимости отражают реальные связи между переменными?
(1) всегда отражают
(2) отражают причинные связи в наборе переменных, но не предполагают реального наличия таких связей
(3) отражают только в линейных моделях регрессии
(4) отражают причинные связи в наборе переменных, и предполагают реальное наличие таких связей
Под мультиколлинеарностью понимается
(1) низкая степень коррелированности объясняющих переменных
(2) высокая степень не коррелированности объясняющих переменных
(3) высокая степень коррелированности объясняющих переменных
(4) низкая степень не коррелированности объясняющих переменных
Ширина интервала для сглаживания ряда рассчитывается по формуле
(1) k + l — 1
(2) k — l — 1
(3) k + l + 2
(4) k + l + 1
Коэффициенты уравнений, входящие в структурную систему уравнений, можно разделить на две группы…
(1) подлежащие определению и заранее известные из исходных теоретических предположений о модели
(2) экзогенные и предопределенные
(3) подлежащие определению и экзогенные
(4) подлежащие определению и предопределенные
Диаграммы путей представляют собой
(1) ломаные линии
(2) блок-схемы и содержат переменные, связанные линиями, которые отображают причинные связи
(3) блок схемы
(4) ломаные линии, которые отображают причинные связи
Показателями качества построенной модели являются
(1) математическое ожидание
(2) дисперсия
(3) средняя относительная ошибка аппроксимации
(4) коэффициент корреляции
Структурный параметр называется неидентифицируемым, если
(1) если существует несколько формул расчета этого коэффициента через коэффициенты приведенной формы модели
(2) не существует формула расчета этого коэффициента через коэффициенты приведенной формы модели
(3) существует формула расчета этого коэффициента через коэффициенты приведенной формы модели
Путевая диаграмма содержит следующие элементы…
(1) все перечисленное
(2) дисперсию независимых переменных
(3) независимые переменные
(4) линейные уравнения
Первым этапом структурного моделирования является следующий
(1) программа с помощью специальных внутренних методов определяет, какие значения дисперсий и ковариаций переменных получаются в текущей модели на основании входных данных
(2) программа проверяет, насколько хорошо полученные дисперсии и ковариации отвечают данной модели
(3) исследователь (пользователь) описывает (обычно с помощью диаграммы путей) модель, представляющую его понимание зависимостей между переменными
(4) программа сообщает пользователю полученные результаты статистических испытаний, а также выводит оценки параметров и стандартные ошибки для численных коэффициентов в линейных уравнениях и одновременно выдает большое количество дополнительной диагностической информации
Какие условия отрицательно сказываются на объясняющих свойствах модели?
(1) все перечисленное верно
(2) избыточное присутствие незначимой объясняющей переменной
(3) отсутствие значимой переменной
Для чего применяется Тест Чоу?
(1) проверки нулевой гипотезы в задаче выявления мультиколлинеарности
(2) проверки структурных изменений модели
(3) проверки значимости коэффициентов регрессионной модели
(4) расчета коэффициента корреляции
В моделях с бинарными переменными переменные принимают следующие значения
(1) 0 и -1
(2) 0 и 1
(3) -1 и 1
Если случайные величины Xi не только центрированы, но и нормированы, выполняются следующие условия
(1) M(Xi) = 1 D(Xi) = 1
(2) M(Xi) = 1 D(Xi) = 0
(3) M(Xi) = 0, D(Xi) = 0
(4) M(Xi) = 0, D(Xi) = 1
При расчетах первое сглаженное значение Y(k + 1) вычисляется по формуле
(1) Y(k + 1) = (X(1) + X(2) + … + X(m))/2m
(2) Y(k + 1) = (X(1) + X(2) + … + X(m)) * m
(3) Y(k + 1) = (X(1) + X(2) + … + X(m)) — m
(4) Y(k + 1) = (X(1) + X(2) + … + X(m))/m
Одним из основных условий для главных компонент z1 и z2 является
(1) компоненты коррелируют между собой
(2) компоненты имеют сильную корреляцию между собой
(3) компоненты не коррелируют между собой
(4) компоненты имеют слабую корреляцию между собой
Процесс сглаживания ряда называют
(1) отбором
(2) фильтрованием
(3) упрощением
(4) сглаживанием
В случае если объясняющие переменные модели могут принимать любые значения в некотором интервале данных, их называют
(1) качественными переменными
(2) категорийными переменными
(3) количественными переменными
(4) бинарными переменными
Для центрированных случайных величин выполняется следующее условие
(1) М(Xi) = 1
(2) М(Xi) = -1
(3) М(Xi) = 0
(4) М(Xi) =стремится к 1
Дисперсия сглаженного по квадратичному полиному ряда Y(t) при увеличении числа m уравнений
(1) остается без изменения
(2) увеличивается
(3) уменьшается
Одним из распространенных способов выявления тренда является
(1) все перечисленное
(2) сглаживание временного ряда
(3) разложение рада на множители
(4) логарифмирование ряда
Дисперсия сглаженного ряда
(1) больше дисперсии исходного ряда
(2) меньше дисперсии исходного ряда
(3) остается неизменной
В сглаженном временном ряде Y(t) процедуру сглаживания начинают
(1) с последнего члена ряда
(2) с первого члена ряда
(3) с максимального члена ряда
(4) со второго члена ряда
Главная / Экономика /
Введение в эконометрику / Тест 9
Упражнение 1:
Номер 1
Каковы последствия гетероскедастичности в случая использования МНК для построения модели?
Ответ:
(1) результаты, основанные на анализе дисперсии коэффициентов, в случае гетероскедастичности применимы полностью
(2) результаты, основанные на анализе дисперсии коэффициентов, в случае гетероскедастичности неприменимы
(3) результаты, основанные на анализе дисперсии коэффициентов, в случае гетероскедастичности применимы в некоторых случаях
Номер 2
В обобщенной линейной модели множественной регрессии дисперсии и ковариации ошибок наблюдений
Ответ:
(1) не произвольные
(2) всегда постоянны
(3) могут быть произвольными
Упражнение 2:
Номер 1
Обобщенная линейная модель множественной регрессии, теорема Айткена и обобщенный метод наименьших квадратов характерны для
Ответ:
(1) обоих методов устранения гетероскедастичности
(2) первого метода устранения гетероскедастичности
(3) второго метода устранения гетероскедастичности
Номер 2
В чем заключается второй подход к решению проблемы гетероскедастичности?
Ответ:
(1) в таком преобразовании данных, чтобы для них модель уже обладала свойством гетероскедастичности
(2) в построении моделей, учитывающих гетероскедастичность ошибок наблюдений
(3) в таком преобразовании данных, чтобы для них модель не обладала свойством гетероскедастичности
(4) все перечисленное
Упражнение 3:
Номер 1
Первый подход к решению проблемы гетероскедастичности
Ответ:
(1) предполагает такое преобразование данных, чтобы для них модель приобретала со временем свойство гетероскедастичности
(2) предполагает такое преобразование данных, чтобы для них модель уже обладала свойством гетероскедастичности
(3) состоит в построении моделей, учитывающих гетероскедастичность ошибок наблюдений
Номер 2
Сколько существует основных подходов к решению проблемы гетероскедастичности?
Ответ:
(1) два
(2) один
(3) три
(4) четыре
Упражнение 4:
Номер 1
Устранение гетероскедастичности путем применения обобщенного метода наименьших квадратов (ОМНК) требует знания
Ответ:
(1) матрицы случайных ошибок
(2) матрицы ковариаций ошибок наблюдений
(3) матрицы систематических ошибок
(4) все перечисленное
Номер 2
Для проверки ошибок модели на гомоскедастичность используют
Ответ:
(1) тест Голдфелда — Квандта
(2) метод Гаусса — Маркова
(3) критерий Спирмена
(4) все перечисленное не верно
Упражнение 5:
Номер 1
Ранг неслучайной (детерминированной) матрицы X предполагается равным
Ответ:
(1) p + 3 < n
(2) p + 2 < n
(3) p + 5 < n
(4) p + 1 < n
Номер 2
Согласно теореме Гаусса — Маркова случайные возмущения…
Ответ:
(1) коррелированы друг с другом
(2) не коррелированы друг с другом,имеют постоянную дисперсию
(3) имеют дисперсии равные единице
(4) все перечисленное
Упражнение 6:
Номер 1
Существуют следующие подходы к решению проблемы гетероскедастичности…
Ответ:
(1) все перечисленное
(2) применение обобщенного метода наименьших квадратов
(3) применение взвешенного метода наименьших квадратов
(4) преобразование данных
Номер 2
Тест ранговой корреляции Спирмена не требует предположения о
Ответ:
(1) нормальности распределения коэффициента корреляции
(2) нормальности распределения регрессоров
(3) нормальности распределения регрессионных остатков
(4) все перечисленное неверно
Упражнение 7:
Номер 1
Тесты для определения наличия гетероскедастичности основаны на
Ответ:
(1) предположении о наличии значимых факторов в моделях
(2) предположении о наличии связи между дисперсиями остатков моделей и объясняющими переменными
(3) предположении о наличии значимых коэффициентов регрессии
(4) предположении об отсутствии связи между дисперсиями остатков моделей
Номер 2
Для определения наличия гетероскедастичности применяют
Ответ:
(1) наблюдения
(2) эксперименты
(3) тесты
(4) расчеты
Упражнение 8:
Номер 1
Какие вопросы решают при исследовании моделей?
Ответ:
(1) все перечисленное
(2) как решать проблему гетероскедастичности
(3) какие следствия для оценок, получаемых по методу наименьших квадратов, влечет гетероскедастичность
(4) как правильно провести диагностику существования гетероскедастичности
Номер 2
Предположение о том, что ошибки ei наблюдений имеют разные дисперсии, называется
Ответ:
(1) гомоскедастичностью наблюдений
(2) регрессией наблюдений
(3) гетероскедастичностью
(4) ковариацией наблюдений
Номер 3
Предположение о том, что ошибки ei наблюдений имеют одинаковые дисперсии, называется
Ответ:
(1) регрессией наблюдений
(2) гомоскедастичностью наблюдений
(3) ковариацией наблюдений
(4) гетероскедастичностью наблюдений
Тенденция к отрицанию гипотезы H0 возрастает по мере

Процесс выделения тренда (выравнивание ряда) включает следующие этапы…
Корреляционным полем временного ряда X(t) называется
Ряды имеют «долговременную память» если убывание коэффициента корреляции носит…
В обобщенной линейной модели множественной регрессии дисперсии и ковариации ошибок наблюдений
Основными характеристиками случайного процесса являются…
Если случайные величины Xi не только центрированы, но и нормированы, выполняются следующие условия
Для чего применяется Тест Чоу?
Целью эконометрики как науки является
При построении прогнозных моделей могут использоваться следующие методы…
Устранение гетероскедастичности путем применения обобщенного метода наименьших квадратов (ОМНК) требует знания
Большие значения, близкие к 1, величины (1 — а1) модели корректировки ошибок (МКО) свидетельствуют о том, что
Для оценки параметров a, b уравнения регрессии применяют метод
Показателями качества построенной модели являются
Превышение доходности yt от держания рискованных ценных бумаг над государственными облигациями, рассчитанными на погашение в течение одного периода времени, принятого за единицу, определяется выражениием
При сглаживании с помощью скользящей средней нет возможности получить сглаженные значения для
Для устранения трудностей построения уравнения регрессии при наличии коррелированности факторов и ошибок модели используют
К экзогенным переменным относятся…
Временной тренд может быть исключен из результирующей переменной путем
Зависимую переменную в регрессионном анализе называют
Четвертым этапом структурного моделирования является следующий
Гипотеза о постоянстве дисперсии проверяется
Задачей гармонического анализа является определение основных гармонических колебаний, входящих в
Автоковариации предельных значений yt
Эконометрика как отрасль науки возникла на стыке следующих дисциплин
В случае если ряд содержит единичные корни и интегрирует с порядком d, он принадлежит классу
Коррелируют между собой следующие тренды
В процессе случайного блуждания используются переменные
Критерий Шварца и критерий Акайке применяют
Выравнивание считается удовлетворительным, если остатки e(t) образуют стационарный процесс
Укажите дисциплины, использующие математические методы применительно к экономике
Исследование моделей по независимым неупорядоченным наблюдениям включает следующие этапы
Первой книгой, которую можно назвать эконометрической, была книга ученого
Начальным этапом применения теории эконометрики является
Эконометрика как отрасль науки возникла на стыке
Проверка значимости коэффициентов уравнения регрессии производится по
Для определения числа степеней свободы для суммы квадратов используют выражение
Проверка значимости коэффициентов уравнения регрессии производится по
Максимальное значение коэффициента детерминации равно
Укажите все ограничения на поведение случайного слагаемого e в условиях Гаусса — Маркова, выполнение которых предполагается при использовании для оценки коэффициентов модели метода наименьших квадратов
Перечислите основные причины отклонений от прямой регрессии
Одним из основных условий для главных компонент z1 и z2 является
Под мультиколлинеарностью понимается
Показателем статистической связи между двумя переменными является
Если случайная величина является нормированной нормально распределенной величиной, то выполняется условие
При оценке математических ожиданий справедливо следующее
В случае, когда в модель не включена существенная переменная, наблюдаются следующие последствия
Нулевая гипотеза при использовании теста Чоу состоит в предположении
Фиктивные переменные позволяют
Стандартная процедура регрессионного анализа, выполняемого на основе метода наименьших квадратов, требует выполнения условий
Каковы последствия гетероскедастичности в случая использования МНК для построения модели?
Обобщенная линейная модель множественной регрессии, теорема Айткена и обобщенный метод наименьших квадратов характерны для
Сколько существует основных подходов к решению проблемы гетероскедастичности?
Согласно теореме Гаусса — Маркова случайные возмущения…
Существуют следующие подходы к решению проблемы гетероскедастичности…
Тесты для определения наличия гетероскедастичности основаны на
Предположение о том, что ошибки ei наблюдений имеют разные дисперсии, называется
К основным принципам разработки прогнозов относится
Величина Dx(t) характеризует
К приемам, позволяющим подобрать соответствующую (адекватную) действительности форму кривой, относятся…
Коррелограммой называют
Временной ряд — это
Основным содержанием ПЭП является…
При расчетах первое сглаженное значение Y(k + 1) вычисляется по формуле
Коэффициент a в выражении Y(t) = Y(t — 1) + a(X(t) — Y(t — 1) является
Для удобства сопоставления сглаженного и исходного рядов ширину интервала сглаживания чаще выбирают исходя из условия
Сглаженный ряд короче исходного на величину
Ошибка наблюдения в модели случае, когда подставляются не истинные, а искаженные наблюдения, состоит
Мультипликатор Кейнса характеризуется следующим высказыванием
Число уравнений приведенной системы совпадает
Необходимое условие идентификации формулируется следующим образом: коэффициенты уравнения идентифицируемы
Возможность нескольких вариантов расчета структурных коэффициентов кейнсианской модели называется
В кейнсианской модели переменные Yt и Сt называются
В кейнсианской модели переменная It формируется под воздействием…
Одной из причин корреляции между факторами и ошибками уравнения регрессии является
Структурные модели с линейными зависимостями являются
Всегда ли построенные зависимости отражают реальные связи между переменными?
Латентными переменными называются
Однозначное отображение, сохраняющее структуру модели, называется
Каждая связь диаграммы путей включает в себя
Первым этапом структурного моделирования является следующий
Техника моделирования структурными уравнениями в пакете STATISTICA имеет аббревиатуру
К критериям селекции относятся…
Для оценки так называемых моделей авторегрессии интегрированного скользящего среднего (АРИСС-моделей) применяют
При q = 0 уравнение авторегрессии называется
Для АР(1)-модели частные автокорреляционные функции между yt и yt — 2 равны
Возможность получения оценок по одной реализации процесса называется
К условиям стационарности модели относятся…
Гипотеза о постоянстве математического ожидания временного ряда принимается в случае
При априорном предположении о нормальном законе распределения значений временного ряда применяют
Стохастическая переменная с постоянной дисперсией называется
Модель, одновременно оценивающую среднее и дисперсию ряда, предложил
Одним из методов прогнозирования дисперсии является
Следствием ложных корреляций являются
В динамическую модель могут входить следующие переменные
Подтверждающий факторный анализ используется…
Выявление трендов, лагов, циклической компоненты определяются при проведении исследований
Впервые термин «эконометрия» ввел П. Цьемпа в
Сглаживание ряда называется центрированным при условии
С увеличением запаздывания объем выборки, по которой вычисляется коэффициент корреляции
Для чего используются эконометрические методы
Система нормальных МНК-уравнений позволяет
Впервые термин «регрессия» ввел
Для случая парной регрессии справедливым является выражение
К методам смягчения мультиколлинеарности относятся
Сглаживание является центрированным и симметричным при условии
Функция P(t) считается полностью определенной, если известны…
Дисциплина эконометрика содержит следующие разделы
Если при сборе данных об урожайности сельскохозяйственных структур результаты работы в отчетах занижаются, завышаются в зависимости от экономической политики или оцениваются «на глазок», то это объясняется
В кейнсианской модели переменная It называется
Коэффициент структурного уравнения системы называется идентифицируемым, если выполняются условия…
В чем заключается второй подход к решению проблемы гетероскедастичности?
Построение моделей структуры средних позволяет
Коэффициент b в упрощенной кейнсианской модели формирования доходов в закрытой экономике без государственного вмешательства называют
Для проверки постоянства математического ожидания используют
Предположение о том, что ошибки ei наблюдений имеют одинаковые дисперсии, называется
За вклад в развитие эконометрической науки присуждены Нобелевские премии следующим ученым
Одним из первых количественных законов стал закон
Коэффициент детерминации определяется выражением
Коэффициент детерминации характеризует
Матрица C = (XTX)-1, обратная матрице XTX, называется
К методам устранения мультиколлинеарности относятся
Предельными значениями коэффициента корреляции являются
Если случайная величина является нормированной нормально распределенной величиной, то выполняется условие
Для cov(bi, bj) справедливо следующее равенство
Теорема Гаусса — Маркова предполагает
При использовании Теста Чоу строятся следующие регрессионные модели
Для проверки ошибок модели на гомоскедастичность используют
Ранг неслучайной (детерминированной) матрицы X предполагается равным
Тест ранговой корреляции Спирмена не требует предположения о
Для определения наличия гетероскедастичности применяют
Какие вопросы решают при исследовании моделей?
Предварительную оценку случайности поведения остатков проводят на основе
Анализ временных рядов проводится
Для уменьшения амплитуды колебаний у сглаженного ряда Y(t) необходимо
Асимметричные фильтры используются для
Как обычно называют сглаживание временного ряда?
Если система уравнений помимо экзогенных и эндогенных переменных содержит еще и значения эндогенных переменных, полученные в предыдущие периоды времени, то такие значения называют
Экзогенные переменные никогда не коррелируют
Моделирование ковариационной структуры позволяет
Если набор чисел X связан с другим набором чисел Y зависимостью Y = 4X, то дисперсия Y должна быть
Путевая диаграмма содержит следующие элементы…
Путевые диаграммы наглядно показывают
Третьим этапом структурного моделирования является следующий
Техника моделирования структурными уравнениями основывается на…
Для проверки стационарности временного ряда применяют
Для проверки условия стационарности ряда последовательность разбивается
Гипотеза о постоянстве дисперсии принимается при условии
Для определения превышения дохода от держания шестимесячной облигации (без учета квадратичных членов) можно использовать выражение
В выражении ln(yt) = a0 + a1ln(xt — 1) + et параметр et = ln et означает
Впервые термин «эконометрия» ввел
Одним из априорных предположений при применении параметрических тестов для проверки стационарности является
Ключевым моментом в ОАРУГ-моделях являются
Уровень надежности равный 0,95 характеризует
Соответствие, максимальное приближение теоретических моделей к реальным производственно-экономическим процессам предполагает
Дисперсия сглаженного ряда
Укажите случайную составляющую выражения Y(t) = q(t) + P(t) + e(t)
Первый подход к решению проблемы гетероскедастичности
Простейшим асимметричным фильтром является
В случае включения в модель нескольких качественных факторов необходимо выполнение следующих условий…
При хорошем качестве построенной модели средняя относительная ошибка аппроксимации составляет
Закон, в котором выяснялись закономерности спроса на основе соотношений между урожаем зерновых и ценами на зерно, носит название
Результативным признаком в регрессионном анализе называют
Если регрессия значима, то
Простейшая регрессионная модель имеет вид
При значениях k близких к объему выборки N можно получить следующее значение Rвыб в квадрате
Какие условия отрицательно сказываются на объясняющих свойствах модели?
В случае если объясняющие переменные модели могут принимать любые значения в некотором интервале данных, их называют
Для математического ожидания матрицы, элементами которой являются центрированные случайные величины, должно соблюдаться условие
Одним из распространенных способов выявления тренда является
Коэффициенты уравнений, входящие в структурную систему уравнений, можно разделить на две группы…
К причинам возникновения в экономических моделях зависимости между объясняющими переменными Xiu и случайными ошибками eu относится и такая
Явные переменные на путевых диаграммах указываются
Диаграммы путей представляют собой
Основными задачами, для решения которых используются структурные уравнения, являются…
Сериальный критерий стационарности применяется для
В выражении для определения превышения доходности yt = mt + et, параметром mt обозначают
Для уменьшения амплитуды колебаний у сглаженного ряда Y(t) необходимо
Структурный параметр называется неидентифицируемым, если
Уравнение кривой можно свести к многочлену посредством
Для установления значимости факторов в шаговой регрессии используют следующие методы
при использовании метода наименьших квадратов (МНК) минимизируется
Для центрированных случайных величин выполняется следующее условие
В случае если сглаживание происходит на основе уравнения параболы, составляется система m уравнений
Латентные переменные указываются
По обучающей выборке определяются следующие числовые характеристики временного ряда
Диаграммы путей используются для
Значимость уравнения регрессии осуществляется по
Нулевая гипотеза о незначимости уравнения регрессии отвергается и принимается гипотеза о значимости уравнения регрессии, если
Число значений исходного ряда, одновременно участвующих в сглаживании, называется
Вторым этапом структурного моделирования является следующий
В моделях с бинарными переменными переменные принимают следующие значения
Процесс сглаживания ряда называют
Включение несущественной переменной в модель оказывает следующие последствия
Коррелограмма показывает убывание положительных rl при возрастании l в случаях…
Дисперсия сглаженного по квадратичному полиному ряда Y(t) при увеличении числа m уравнений
В сглаженном временном ряде Y(t) процедуру сглаживания начинают
Процесс структурного моделирования включает в себя следующие этапы
Причинные модели могут включать

Учебный курс «Теория Автоматического Управления» Современная ТАУ • Описание одномерных и многомерных объектов и систем в пространстве состояний • Связь матрично-векторной и вход-выходной моделей объектов и систем • Понятия управляемости и наблюдаемости • Понятие базиса в пространстве состояний • Основные формы представления математических моделей • Наблюдатели состояний Далее

Современная ТАУ • Системы с обратной связью по состоянию • Управление и наблюдение в многомерных системах. Разделяющее преобразование. • Закономерности движения • Оценка устойчивости состояния автоматических систем • Оценка устойчивости замкнутых систем с использованием функции Ляпунова • Математическое описание и исследование дискретно-непрерывных систем управления.

Описание одномерных и многомерных объектов и систем в пространстве состояний • Основные понятия и определения • Математическое описание в пространстве состояний

Связь матрично-векторной и вход-выходной моделей объектов и систем • Построение МВ ММ по вход-выходной модели • Построение МВ ММ по структурной схеме • Построение вход-выходных моделей по матрично-векторным • Техника вычисления передаточных матриц

Понятия управляемости и наблюдаемости • Понятие управляемости • Понятие наблюдаемости и полноты • Понятие стабилизируемости, детектируемости и идентифицируемости

Понятия базиса в пространстве состояний • Основные понятия и определения • Общие закономерности преобразования МВ ММ к произвольно выбранному базису

Наблюдатели состояний • Основные понятия и определения • Редуцированный наблюдатель

Системы с обратной связью по состояниям • Основные понятия и определения • Модальное управление одномерными объектами • Модальное управление многомерными объектами

Управление и наблюдение в многомерных системах. Разделяющее преобразование. • Многомерный ДНС Луенбергера. Преобразования, разделяющиеся по наблюдениям. • Преобразование, разделяющееся по наблюдению • Преобразование, разделяющееся по управлению • Возможности систем обратных связей для многовходовых объектов. Примеры построения многовходовых объектов

Закономерности движения • Понятия возмущенного и невозмущенного движений • Свободное движение • Вынужденное движение

Оценка устойчивости состояния автоматических систем • Понятие устойчивости в пространстве состояний • Оценка устойчивости по Ляпунову • Оценка устойчивости по переходной матрице • Оценка устойчивости по спектру линейной системной матрицы

Оценка устойчивости замкнутых систем с использованием функции Ляпунова • Основные понятия и определения • Построение функции Ляпунова на основе матрично-векторной модели. • Теорема Ляпунова для линейных систем • Оценка качества переходных процессов

Математическое описание и исследование дискретнонепрерывных систем управления • Основные понятия и определения • Переходные уравнения состояния ДНС • Вычисление переходной матрицы состояния ДНСУ • Эквивалентные преобразования матрично-векторных моделей линейных ДНСУ • Оценка фундаментальных свойств ДНСУ • Математические модели процессов в ДНСУ

Описание одномерных и многомерных объектов и систем в пространстве состояний Основные понятия и определения. Переменные состояния – это некоторые внутренние переменные объекта или системы, характеризующие ее динамические свойства. Описание в пространстве состояний – это представление математической модели объекта или системы с использованием переменных состояния.
 строится на основе системы дифференциальных")
Математическое описание в пространстве состояний Матрично-векторная математическая модель (МВММ) строится на основе системы дифференциальных уравнений в форме Коши уравнение состояний уравнение наблюдений — вектора — матрицы — системная матрица (характеризует фундаментальные свойства объекта или системы, n – размерность объекта) — матрица управлений (m – количество управляющих входов) — матрица возмущений (r – количество возмущающих входов) — матрица выходов (показывает взаимосвязь между переменными состояния и выходами, p – количество выходов) — матрица взаимосвязей управлений с выходами — матрица взаимосвязей возмущений с выходами

Связь матрично-векторной и вход-выходной моделей объектов и систем Построение МВ ММ по вход-выходной модели В зависимости от соотношения степеней полиномов числителя и знаменателя передаточной функции возможны 3 случая перехода: После применения обратного преобразования Лапласа
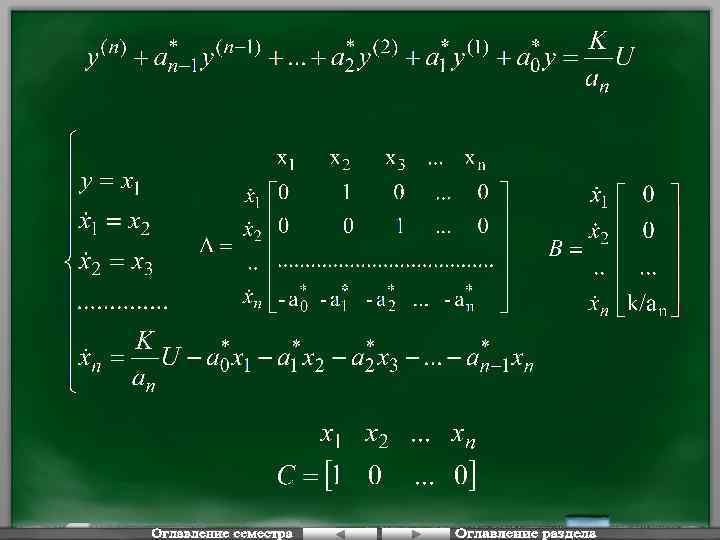
![Пример Дан объект управления Необходимо построить МВ ММ С=[1 0 0]](https://present5.com/presentation/75461770_438078903/image-19.jpg "Пример Дан объект управления Необходимо построить МВ ММ С=[1 0 0]")
Пример Дан объект управления Необходимо построить МВ ММ С=[1 0 0]
 формируются матрицы А и В по первому случаю 2) формируется матрица С, после")
1) формируются матрицы А и В по первому случаю 2) формируется матрица С, после обратного преобразования Лапласа C =[1 0 … 0]
 Исходная математическая модель, представленная в")
Построение МВ ММ по структурной схеме. Алгоритм построения: 1) Исходная математическая модель, представленная в графической форме преобразуется к структуре, содержащей только элементарные звенья нулевого или первого порядков (ПЗ или ИЗ). 2) На выходах динамических звеньев первого порядка назначаются переменные состояния выходы звеньев нулевого порядка не обозначаются (они входят в МВ ММ в качестве коэффициентов). 3) Формируются сигналы на входах динамических звеньев, согласно полученной на первых этапах структуре, при этом участвуют как назначенные переменные состояния, так и сумматоры и звенья нулевого порядка. 4) Составляется система операторных алгебраических уравнений, после применения обратного преобразования Лапласа она преобразуется в систему дифференциальных уравнений в форме Коши, по которой строится МВ ММ.

Пример: Дана структурная схема объекта управления Необходимо построить МВ ММ
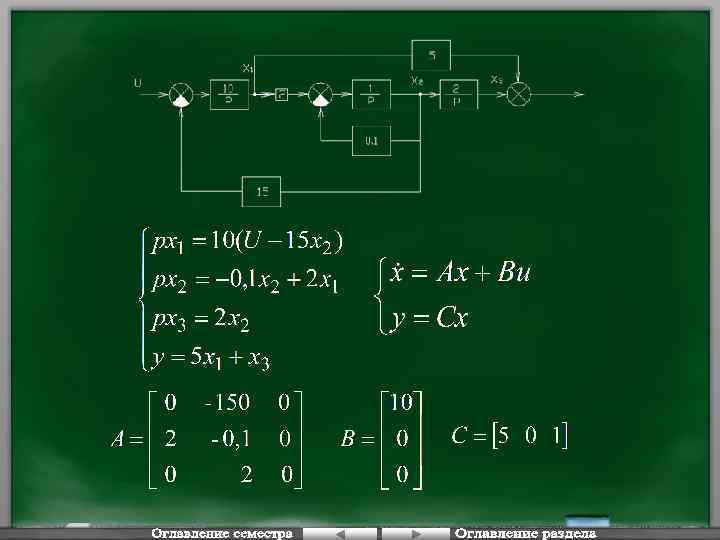
 по")
Построение вход-выходных моделей по матрично-векторным 1 характеристическая матрица характеристический полином Передаточные матрицы (ПМ) по состоянию

2 Передаточные матрицы по выходам Передаточная матрица – это матрица, в ячейках которой стоят передаточные функции по соответствующим каналам Пример

Техника вычисления передаточных матриц Основной задачей при построении передаточных матриц является нахождение обратной характеристической матрицы и определителя. В случае высокой размерности объекта это может представлять особые трудности, поэтому для построения передаточной матрицы использую специальные алгоритмы. Самым распространенным является алгоритм Леверье-Фадеева. проверочный шаг — след матрицы
 a 2=1; 2) 3) а 1=1")
Пример Пусть объект управления имеет ММ: 1) a 2=1; 2) 3) а 1=1

Заключение: Полученные результаты показывают, что переход от вход-выходной к матрично-векторной форме записи не всегда является правомерным и однозначным, т. к. матрично-векторная форма является наиболее полной формой записи, в которой присутствуют все внутренние и внешние объекты, а во вход-выходной форме известны свойства только по одному каналу; важное значение при переходе из одной формы в другую имеет свойство управляемости и наблюдаемости объекта. Если объект является полным, то взаимные переходы являются правомерными и однозначными.

Понятия управляемости и наблюдаемости динамических систем. Пренебрежением фактором управления или наблюдения объекта может привести к ошибочным результатам, в связи с этим рассматривается два важных понятия: — наблюдаемость ; — управляемость. В результате возникают два важных вопроса: 1. Можно ли, выбрав соответствующим образом входы U(t) перевести ОУ из некоторого произвольного состояния в другое произвольное состояние 2. Можно ли, наблюдая вектор выходов Y(t) в течение достаточно длительного промежутка времени определить начальное состояние объекта?

Понятие управляемости. Объект называется полностью управляемым, если для любых моментов времени t 0, t 1 (t 1> t 0), любых заданных состояний x(t 0), x(t 1) существует управление U(t), где t 0

Понятия наблюдаемости и полноты Объект называется полностью наблюдаемым, если по данным измерения, наблюдения, на конечном интервале времени t 0

Понятие стабилизируемости, детектируемости и идентифицируемости Частично управляемый объект является стабилизируемым в том случае, если собственные числа системной матрицы, его неуправляемой части имеют отрицательные вещественные части (являются устойчивыми). Объект называется детектируемым, если системная матрица его не наблюдаемой части имеет устойчивый спектр корней. Объект называется идентифицируемым, если по измерениям переменных состояния на некотором интервале можно найти матрицу A.

Пример № 1: — полная — управляемая — неполная — неуправляемая

Пример № 2: Определим управляемость и наблюдаемость: Объект является частично управляемым, т. к. неуправляемая одна переменная и частично наблюдаемым, т. к. не наблюдается одна переменная ; объект является неполным, поэтому переменные и нежелательно использовать в законе управления, т. к. устройство будет работать некорректно.

Понятие базиса в пространстве состояний Система всегда записана относительно некоторых конкретных базовых векторов , которые называются базисом (векторы при этом должны быть линейно независимыми решениями между собой). Форма записи матрично-векторных моделей не является единственной для каждых конкретных A, B, C, конкретные A, B, C соответствуют некоторому конкретному базису в пространстве состояний. Любое n-мерное линейное пространство имеет множество различных базисов. Для перехода к новому базису существует некоторое преобразование, которое обозначается: . Это преобразование должно удовлетворять следующим условиям: — p – квадратная матрица и невырожденная [ ].

Общие закономерности преобразования МВ ММ к произвольно выбранному базису Поиск необходимого преобразования P может быть различным в зависимости от того, какова исходная предпосылка преобразования. 1) Преобразование на основе управляемости Необходимо, чтобы объект был полностью управляемым. После определения преобразования обязательно необходимо сделать его проверку. (1) Если преобразование из исходного базиса в новый не дает положительного результата, то преобразовать объект исходного базиса в заданный невозможно. 2) Преобразование на основе свойств наблюдаемости Для его построения необходимо, чтобы объект был полностью наблюдаемым. (2)

Основные формы представления МВ ММ и способы перехода к ним Для исследования динамических систем в пространстве состояний в теории управления используется семь основных форм: 1) Основная нормальная форма (ОН) В ОН форме управляемой матрица В имеет стандартную форму, а С может быть произвольной. В ОН форме наблюдаемой матрица С должна быть стандартной, а В может быть произвольной. Для перехода к ОН форме используют преобразования (1) и (2).
 Транспонированная ОН (ТОН) Для перехода к данной форме, обычно используют специальные преобразования: а)")
2) Транспонированная ОН (ТОН) Для перехода к данной форме, обычно используют специальные преобразования: а) Исходный базис должен быть в ОН – форме. б) , где — матрица управляемости
 Дополнительная нормальная форма 4) Обратная нормальная форма Для перехода к ней применяют преобразования")
3) Дополнительная нормальная форма 4) Обратная нормальная форма Для перехода к ней применяют преобразования (1) или (2). 5) Каноническая диагональная форма (КД) где — собственные числа матрицы А

Для перехода к данной форме записи используют специальные преобразования с помощью матрицы Вандермонда: Для перехода к диагональной форме записи необходимо сначала преобразовать к ОН форме. 6) Жорданово — каноническая форма , где 7) Треугольная форма — клетки Жордана Из данных 7 форм, наибольшее распространение получили три: а) ОН б) ТОН в) КД
 состояния линейных динамических объектов и систем Динамический наблюдатель состояния (ДНС) – техническое")
Наблюдатели (идентификаторы) состояния линейных динамических объектов и систем Динамический наблюдатель состояния (ДНС) – техническое устройство, позволяющее с использованием доступных измерению вход-выходных переменных объекта, получать текущую оценку состояния объекта с некоторой, достаточной степенью точности. Схема наблюдателя:

Для синтеза наблюдателя необходимо ввести понятие, регламентирующее точность наблюдения переменных состояния, как самое важное свойство наблюдателя. Для этого вводится понятие асимптотической сходимости. , где М – допустимое значение отклонения наблюдения Однако для динамических систем М какой-либо величины от действительного значения приводит к искажению оцениваемой динамики. Поэтому вводится понятие асимптотической ошибки наблюдения. 0 0
 Наблюдатель состояния Калмана (так называемый")
В теории управления применяется 2 типа наблюдателей состояний: 1) Наблюдатель состояния Калмана (так называемый полный наблюдатель). 2) Наблюдатель состояния Луенбергера (так называемый редуцированный наблюдатель). Наиболее распространенным в инженерной практике является ДНС Калмана. Условия асимптотической оценки наблюдателя состояния: ( — вектор обратных связей наблюдателя, формирующий его динамические свойства). Модель наблюдателя (Калмана):

Для обеспечения асимптотического затухания ошибки наблюдения необходимо, чтобы имела устойчивый спектр корней и чтобы характер затухания удовлетворял условиям асимптотической ошибки необходимо выполнение условия: Из второго условия можно определить вектор обратных связей наблюдателя: 1) Вывод: Основная нормальная форма записи является непригодной для формирования вектора обратных связей ДНС, т. к. невозможно определить все его ( ) коэффициенты.
 - коэффициент характеристического полинома наблюдателя.")
2) — коэффициент характеристического полинома наблюдателя.

Пример: Выберем корни наблюдателя:
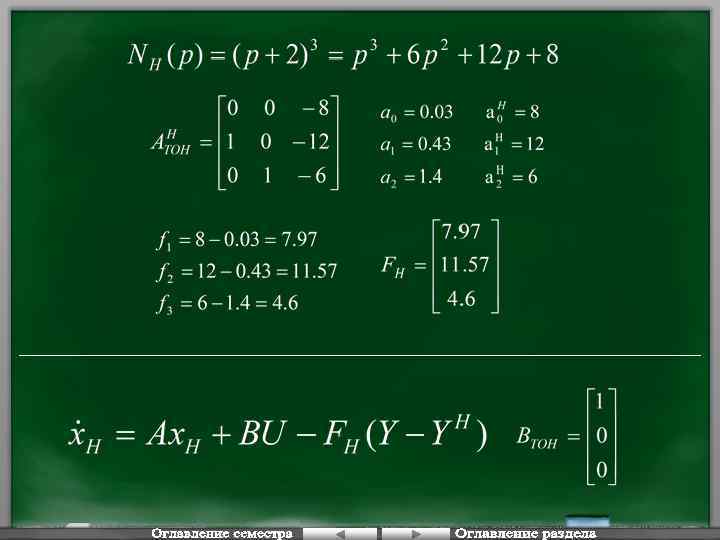
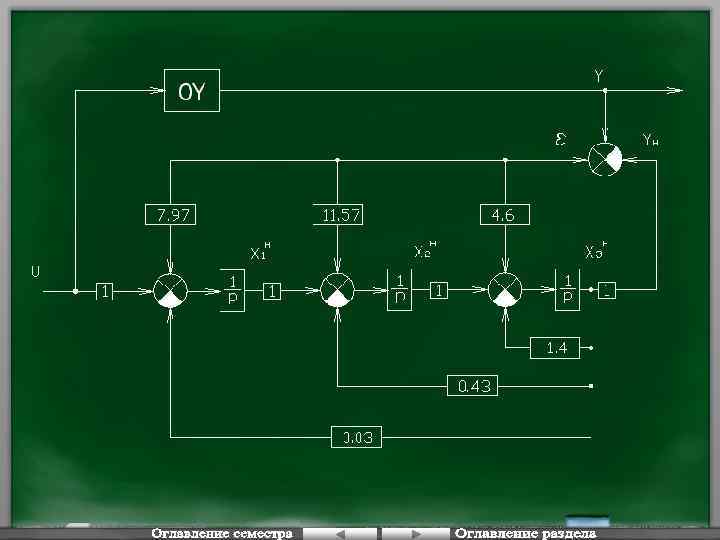

Преимуществом использования ДНС при построении САУ по сравнению с классическими вход — выходными методами является то, что появляется возможность для формирования закона управления не только непосредственно изменяемых Y и входных воздействий U, но и всех наблюдаемых переменных состояния, оценивающих реальные переменные с точностью определенной выбранными параметрами асимптотической оценки. Достоинство асимптотического ДНС Калмана состоит в его универсальности и в высокой эффективности наблюдаемых переменных состояния, т. е. независимо от причин отклонения действительных значений этих переменных, наблюдаемые переменные сводятся к ним со скоростью, определяемой выбранными значениями собственных чисел наблюдателя.

Недостатком является его большая сложность при высокой размерности объекта, т. к. он является полным. Во многих реальных случаях выходная переменная Y совпадает с одной из переменных состояния, тогда оценка соответствующей переменной оказывается лишней, кроме того практически всегда базис объекта можно преобразовать так, чтобы указанное условие соблюдалось, более того в многомерных объектах базис можно построить таким образом, чтобы выходные переменные совпадали с таким же количеством переменных состояния, тогда появляется возможность создать редуцированный или усеченный наблюдатель с общей экономией, соответствующий общему количеству выходных переменных Y.

Редуцированный наблюдатель состояния. Для синтеза ДНС необходимо объект преобразовать к ТОН форме записи наблюдаемой. Необходимо применить преобразование: — коэффициент характеристического полинома наблюдателя состояний. Свойства ДНС выбираются аналогично ДНС Калмана, но размерность наблюдателя на единицу меньше размерности объекта.

— некоторые коэффициенты, которые фигурируют в коэффициентах характеристического полинома и наблюдателя.

После преобразования матрица имеет ТОН форму коэффициент γ определяет ее свойства, задавая их с учетом точности наблюдения можно сформировать ДНС. — уравнение редуцированного наблюдателя Луенберга. определяет точность работы наблюдателя, т. е. скорость схождения ошибки к нулю, определяется собственными числами матрицы (коэффициент γ), который выбирается по аналогии с ДНС Калмана.

Пример: Математическая модель объекта имеет вид:

Недостатком наблюдателя Луенбергера по сравнению с наблюдателем Калмана является то, что в нем отсутствует сравнение действительного и наблюдаемого значения переменной состояния и подстройка переменных состояния к истинным значениям с помощью обратной связи. Осуществляется в плане участия переменной в формировании динамики переменной состояния в соответствии с исходной моделью. В результате, выигрывая в простоте реализации наблюдателя проигрывают в точности оценки состояния. При спонтанных отклонениях начальных значений переменная ошибка наблюдения подавляется с интенсивностью, заданной коэффициентами γ, но при наличии постоянно действующего неконтролируемого воздействия наблюдаемость осуществляется также с постоянной, не равной нулю ошибкой. В этом отношении наблюдатель Калмана более эффективен, чем наблюдатель Луенбергера.

Системы с обратной связью по состоянию Модальное управление объектами. Рассмотрение объектов и систем в пространстве состояний имеет то преимущество, что при замыкании такой системы обратной связью имеется возможность выбора эффективных (наилучших) значений коэффициентов операторов обратной связи по каждой переменной состояния. Такой подход дает больше возможностей для формирования устойчивой системы и придания ей заданного качества, так как n-мерный статический регулятор обратной связи имеет n-степеней свободы, тогда как П — регулятор при вход-выходном описании имеет только одну степень свободы.

Модальное управление одномерными объектами. Замыкая такой объект обратными связями по переменным состояния можно получить вектор управляющих воздействий. — корни объекта — корни системы должны быть лучше, чем корни объекта

Для построения вектора обратной связи необходимо матричновекторную модель объекта преобразовать к основной нормальной управляемой форме записи.
 характеристического полинома системы принимают заранее заданные значения называется модальным.")
Управление, при котором корни (моды) характеристического полинома системы принимают заранее заданные значения называется модальным. Пример: Построить систему модального управления для объекта вида: Выберем корни будущей системы исходя из условия устойчивости системы.

Замечание 1 Модальное управление не позволяет повышать точность работы системы, так как УУ является статическим, поэтому для обеспечения высокой точности работы системы необходимо изначально повысить порядок астатизма объекта за счет включения интегрирующих звеньев.

Замечание 2 Ограниченность модального управления состоит в том, что обратная связь по переменным состояния изменяет моды только характеристического полинома. Если вход-выходная модель объекта имеет полином в правой части, то он переходит во вход-выходное описание системы без изменений. Но так как числитель не влияет на устойчивость системы, то его необходимо учитывать только в случае обеспечения высокого качества функционирования систем. Корни системы выбираются лучше, чем у объекта и они должны обеспечивать заданное качество. В данном случае необходимо, чтобы время регулирования было в 5 раз меньше.

Модальное управление многомерными объектами. Если у объекта количество вводов больше одного, то модальное управление также можно реализовать как и в одномерном случае, с той лишь разницей, что вектор k превратится в матрицу k -> m x n, где m – число входных воздействий

Управление и наблюдение в многомерных системах. Разделяющиеся преобразования. Многомерный ДНС Луенбергера. Преобразования, разделяющиеся по наблюдениям. Для построения такого наблюдателя в многомерном cлучае, необходимо преобразовать ММ объекта таким образом, чтобы она была представлена таким же количеством подсистем, сколько измеряемых выходов имеет объект, тогда возможно построение одномерных НЛ. (r — количество выходов)

Необходимо разделить объект на подсистемы. Для обеспечения правильного разделения необходимо, чтобы объект был наблюдаемым (частично). Алгоритм построения преобразования, разделяющегося по наблюдению. 1) Выбираем в качестве элементов промежуточной матрицы Q, используемой для построения матрицы разделяющейся по наблюдению. R – линейно-независимых строк матрицы C
 К выбранным r строкам добавляем последовательно, начиная, например, со строки С 1 А,")
2) К выбранным r строкам добавляем последовательно, начиная, например, со строки С 1 А, С 1 А 2 и т. д. , проверяя каждую на линейную независимость от всего предыдущего набора. Если некоторая очередная строка окажется линейно зависимой, то ее выбрасываем, а остальные не проверяем, т. к. все они будут линейно зависимы. Поэтому выбранный набор ограничивается членом
 Из выбранных n строк строим матрицу Q по правилу: 4) С использованием обратной")
3) Из выбранных n строк строим матрицу Q по правилу: 4) С использованием обратной матрицы Q, строится матрица преобразования.
 Построение оставшихся матриц * - любые числовые значения")
5) Построение оставшихся матриц * — любые числовые значения

Согласно полученной структуре разделяющихся матриц, последнею переменную из подсистем можно приравнять к выходам и благодаря этому построить r одномерных наблюдателей Луенбергера. Преобразование, разделяющееся по управлению. Исходными данными также является система уравнений. Пусть объект является управляемым и матрица В имеет размерность. Для построения преобразований, разделяющихся по управлению, можно использовать 2 алгоритма:
 В качестве первых m столбцов для преобразования")
Первый алгоритм аналогичен алгоритму по наблюдению: 1) В качестве первых m столбцов для преобразования Выбирается m – столбцов матрицы В; 2) К выбранным столбцам последовательно присоединяются столбцы Ab 1, Ab 2, … и проверяется линейная независимость каждого последующего от всех предыдущих. Если какой-либо очередной столбец линейно зависим, то дальше наращивание на базе этого столбца не происходит.

На базе столбцов строится матрица преобразования, ее столбцы располагаются также, как располагались строки в преобразования, разделяющиеся по наблюдению. С помощью рассмотренного преобразования одна математическая модель разлогается на m подсистем, размерностью является одномерной по входу. Таким образом появляется возможность последовательного синтеза по каждой из компонент управления отдельно. В результате преобразования матрица

При линейной зависимости столбцов матрицы В или при необходимости выделить достаточное подмножество управляемых воздействий для управляемости объекта можно применить второй алгоритм:
 Строится матрица управляемости (МУ) и из нее выбираются столбцы для преобразования в следующем")
1) Строится матрица управляемости (МУ) и из нее выбираются столбцы для преобразования в следующем порядке последний линейно независимый столбец из набора 2) Если то выбираем из второго столбца или до последнего линейно независимого столбца (до n линейно независимых). 3) Аналогично для b 3, b 4, …, тогда последний член набора показывает, что можно выделить количество управлений q, который меньше m, обеспечивающих управляемость объекта. Если на базе новой матрицы построить новый базис, то объект примет вид но иметь вид верхней, треугольной клеточной матрицы, где количество клеток равно q.

Второй способ построения имеет то преимущество, что выделяет необходимое и достаточное для управления количество элементов входных воздействий и понижает размерность системы по входам. Пример:

или При построении системы управления чаще приходится использовать ДНС и построив ДНС необходимо помнить, что схема получена в соответствующем базисе, отличным от того в котором построено управление, поэтому после расчета ДНС и формирования модального управления, необходимо привести модели к общему базису.

Возможности систем обратных связей для многовходовых объектов. Примеры построения многовходовых объектов с использованием разделяющих преобразований. Пример № 1 — необходимо построить модальное управление объектом, разделенным на подсистемы в предыдущем примере. — матрица

Для сохранения структуры матрицы Ас необходимо некоторые элементы матрицы Вк положить нулевыми, а остальные варьировать в зависимости от заданных требований. Требования к новой системе: Корень -1 заменить на -5 (p+5) Остальные корни должны иметь максимум по модулю вещественные части при условии изменения только коэффициента а 0 На компьютере можно подобрать оптимальное значение а 0, обеспечивающее второе условие:

Для правильного построения модального управления необходимо преобразовать объект и вектор обратных связей к исходному базису.

Пример № 2: Необходимо получить преобразование, разделяющее по управлению и реализовать модальное управление объекта. В качестве разделяющих преобразований можно использовать матрицу Вандермонда, которая приводит объект к диагональной форме записи.
")
(!)

Закономерности движения линейных систем в пространстве состояний. Понятие возмущенных и невозмущенных движений. Одно или несколько движений устанавливающихся в системе при отсутствии внешних воздействий называются невозмущенными. Все остальные движения, являющиеся следствием любых воздействий на систему, называются возмущенными. — это уравнение описывает состояние объекта. Если объект не возмущен, то x(t)=0 х – состояние t – время v – вектор входных воздействий F – нелинейная функция — справедлива для стационарных систем

Для анализа свойств стационарных систем, обязательным условием является задание начального состояния объекта, которые называются начальными условиями. Ненулевые начальные условия движения исследования объекта называются возмущениями. Возмущенные движения системы на некотором интервале времени в отсутствии влияния внешних воздействий называются свободными движениями объекта. Аналогичное движение при наличии воздействий называется вынужденным.

В практике теории управления распространенным является случай, когда переменные состояния связаны между собой выражением:

В этом случае переменные состояния принято называть фазовыми координатами, траектории – фазовыми. Часто для наглядности эти траектории отображают на плоскости. Изображение сечения фазовой траектории на плоскости называется портретом. Положение равновесия исследуемого объекта соответствует равенство нулю всех производных: означающее прекращение движения по всем 0 переменным состояния. Такая точка называется особой. У всех линейных систем такая точка одна – начало координат. У нелинейных где — нелинейная функция.
 Для оценки свободного движения объекта необходимо принять")
Свободные движения в линейной динамической системе. (1) Для оценки свободного движения объекта необходимо принять уравнение равным нулю, тогда система превратится в однородное уравнение Динамическая система, описываемая уравнением (1), при условии U(t)=0 называется автономной системой. Матрица Х(t), [n x n] называется фундаментальной для системы (2) когда ее столбцы образованы линейно независимыми решениями этой системы — называется определителем Вронского. (2)
 Должна быть не особенной, т. е. определитель Вронского не должен")
Свойства фундаментальной матрицы: 1) Должна быть не особенной, т. е. определитель Вронского не должен обращаться в ноль; 2) Должна удовлетворять уравнению Если матрица X(t) неособенная и удовлетворяет решению данной системы, то она является фундаментальной. Если Х(t) есть фундаментальная матрица, то называется переходной матрицей. На основании свойств фундаментальной матрицы дать свойства переходной матрице: 1) 2) Для каждого 3) 4) Переходная матрица представляет собой фундаментальную, построенную для единичных начальных условий

Поэтому переходную матрицу можно определить как решение матричного уравнения: Если х0 — вектор произвольных не нулевых начальных условий, то решение системы можно найти по следующей формуле: Определение переходной матрицы и ее свойств относятся к системам, описываемыми ДУ с постоянными и переменными коэффициентами.

Так как в данном разделе рассматриваются объекты и системы с постоянными коэффициентами, то для более подробного анализа свойств переходной матрицы рассмотрим линейное однородное ДУ первого порядка: В соответствии со свойствами переходной матрицы, это одно из решений матричного ДУ, обращающееся в единичную матрицу каждый раз, когда элементы t и t 0 равны руг другу. В случае системы первого порядка переходная матрица вырождается в скалярную функцию. Следовательно роль переходной матрицы играет решение равное (1). при t = t 0 (3)
 можно ввести понятия матричного экспоненциала, для этого можно использовать")
По аналогии с экспонентной (3) можно ввести понятия матричного экспоненциала, для этого можно использовать разложение экспоненты в ряд по степеням разности : Если в этой формуле α заменить на матрицу А, то получится некоторая функциональная матрица, которая и называется матричным экспоненциалом: (4) Переходной матрицей системы (1) является матричный экспоненциал, определенный равенством (4).

Таким образом можно записать еще несколько свойств переходной матрицы, вытекающих из понятия матричного экспоненциала: а) если системная матрица А – постоянная, то б) если А – скаляр и А=α, то в) г) д) е)

Вынужденные движения в линейных динамических системах. Если математическая модель объекта описывается неоднородной системой уравнений то для получения ее решения можно воспользоваться переходной матрицей вида (4), которая позволяет найти это решение методом варьируемых постоянных интегрирования (метод Лагранжа). Теорема: Если Φ(t, t 0) есть переходная матрица объекта, то единственное решение системы уравнений, при x(t 0)=x 0 задается формулой (5)
 – формула Коши, она определяет значение переменных состояния в любой момент времени t")
(6) – формула Коши, она определяет значение переменных состояния в любой момент времени t > t 0 Частным случаем для определения переходной матрицы является вариант, когда t 0=0 :
, но существуют и")
Наиболее часто решение для переходной матрицы находится с помощью выражения (4), но существуют и другие подходы. Пусть объект описывается неоднородным ДУ. Применим к уравнению Преобразование Лапласа при нулевых начальных условиях: (7)

Пример: Для получения переходной матрицы через разложение в ряд удобно использовать КД форму записи, т. к. для нее легко вычислить любые степени. Подставляя в последнее выражение формулу (4), при t 0 = 0 получим: откуда

Для применения данного подхода необходимо, чтобы матрица А не имела кратных корней, комплексно-сопряженных. Пример 1: Пусть системная матрица объекта имеет вид: где — собственные числа матрицы,

Пример 2: Необходимо вычислить переходную матрицу для объекта, заданного системой ДУ

Оценка устойчивости состояния автоматических систем по матрично-векторной модели. Понятие устойчивости в пространстве состояний. Оценка устойчивости объектов и систем по вход-выходным критериям является производной от более общей и фундаментальной оценки устойчивости для систем в пространстве состояний. Для произвольных систем (линейных, нелинейных, в полных и частных производных, стационарных и нестационарных) является очень сложной задачей, иногда не решаемой. Понятие устойчивости является относительным, по своей природе любой объект является физически устойчивым (техническая устойчивость). В то же время по управляемой входной переменной он может быть неустойчивым, при этом при рассмотрении объектов и измерений может рассматриваться как устойчивый, так и неустойчивый, потому говорят не об устойчивости объекта, а устойчивости движения.

Для определения большинства понятий устойчивости обычно используют конечномерное евклидово пространство состояния Для общего понятия определения устойчивости назначим 2 множества: 1) Множество начальных состояний 2) Множество конечных состояний Gk в общем случае также задается в Rn и времени t. Его элементы обычно удовлетворяют уравнению движения объекта и системы. Область G 0 обычно имеет ту же размерность, что и пространство состояний (n), область Gk (
 Если уравнение (*) x ≡ 0 и рассматривается устойчивость этого состояния, то множество")
(*) Если уравнение (*) x ≡ 0 и рассматривается устойчивость этого состояния, то множество Gk состоит из одной точки – начало координат (0), при этом возможно 2 варианта: а) внутри G 0 находится Gk (распространен в технических системах). б) Gk вне этой области 0 0
 и имеющий параметрическое представление,")
Если Gk представляет собой одну из траекторий удовлетворяющей уравнению (*) и имеющий параметрическое представление, то размерность множества Gk=1 0 Рисунок 2 На рисунке 1 траектория движения – предельный цикл (автоколебаний), характерный для нелинейных систем с гладкими и разрывными функциями. На рисунке 2 – это отрезок прямой (крайне редко).
, любой размерности, на котором лежат траектории,")
В качестве множества Gk может выступать поверхность (цилиндр), любой размерности, на котором лежат траектории, которые соответствуют уравнению (*). Множество Gk будем называть множеством невозмущенных состояния или движений, а множество G 0 — областью притяжения при наличии устойчивости. Одна и та же система может иметь несколько множеств невозмущенных движений и соответствует области притяжения, примером является автоколебательная система с некоторыми предельными циклами. 0 Множество невозмущенных состояний (движений) называется асимптотически устойчивым с областью притяжения G 0, если всякие движения начавшиеся в G 0 в силу уравнений или законов движения динамической системы, приходит сколь угодно малую окрестность Gk с течением времени.

Если множество G 0 охватывает все пространство состояний или некоторую область, ограниченную для данной системы, то соответствующую устойчивость называется устойчивостью в целом. — норма вектора состояний x Служит мерой возмущенного движения

Оценка устойчивости по Ляпунову. Основополагающий подход к оценке устойчивости связан с рассмотрением невозмущенных движений, для ее оценки нужно доказать, что возмущенное движение в окрестности ограниченно по возрастанию переменных в пространстве состояний. Определение. Невозмущенное движение называется устойчивым по Ляпунову, если для любого положительного числа оно ни было, можно найти , как бы мало некоторое число , такое, что из неравенства , где для каждого — фиксированный начальный момент времени. Устойчивость по Ляпунову называют малой или локальной устойчивостью.

0 Определение. Движение и соответственно его равновесное положение, устойчивое по Ляпунову и отвечающее дополнительному относительно предыдущего определения свойству называется асимптотически устойчивым. Устойчивые линейные системы всегда являются асимптотически устойчивым. Здесь подменяется , т. е. 0 при
 2) Странный аттрактор Консервативное звено (генератор синусоидальных колебаний) 0")
Примеры движений различных систем 1) 2) Странный аттрактор Консервативное звено (генератор синусоидальных колебаний) 0
 Колебательное звено (минимально-фазовое) 0 0")
3) Колебательное звено (минимально-фазовое) 0 0
 Колебательное звено (неминимально-фазовое) 0 0")
4) Колебательное звено (неминимально-фазовое) 0 0

Оценка устойчивости по переходной матрице. Для оценки устойчивости достаточно анализировать только собственные движения объекта или системы. возможно три случая: При исследовании 1) Переходная матрица является ограниченной: для каждого если переходная матрица ограничена, то можно показать, что то будет выполняться если условие устойчивости по Ляпунову. 2) Переходная матрица – асимптотически затухающая функция времени т. е. второй случай устойчивости. соответствует асимптотической 3) Неограниченная матрица, т. е. в ней есть хотя бы один элемент, который неограничен на интервале времени т. е. движение того элемента является расходящимся – неустойчивое движение.
 Объект является устойчивым по Ляпунову, если")
Оценка устойчивости по спектру линейной системной матрицы. 1) Объект является устойчивым по Ляпунову, если выполняется условие: 2) Неустойчивым, если условие следующее: 3) Является асимптотически устойчивым, если Доказательством этих условий является решение однородных уравнений по формуле Коши:

Оценка устойчивости замкнутых систем с использованием функции Ляпунова. Основные понятия и определения. Ляпунов предложил исследовать устойчивость движения с помощью специальных знакоопределенных функций, которые называются функцией Ляпунова. Функция Ляпунова — это непрерывная вещественная функция, определенная в n-мерном пространстве , имеющая определенный знак, непрерывные частные производные в области начале координат. Другими словами, и равная нулю только в — шаг радиуса R. Для оценки устойчивости функции Ляпунова необходимо знать понятия знакоопределенности функции. Функцию назовем определенно положительной в области (*), если всюду в этой области, кроме начала координат, имеет смысл неравенство Если же выполняется неравенство то функция называется определенно отрицательной (общее название — функция знакоопределенная).
 имеет место всюду неравенство или то функция называется знакопостоянной. определенно")
Если в области (*) имеет место всюду неравенство или то функция называется знакопостоянной. определенно положительной , функция К примеру функция будет знакопостоянной в пространстве Функция является определенно отрицательной в пространстве Теорема 1: (об устойчивости) Если для системы (**) существует в области R знакопостоянная функция V(x, t), производная которой по времени, взятая в силу системы (**), является знакопостоянной функцией знака, противоположного знаку функции V(x, t), то положение равновесия устойчиво в смысле Ляпунова. Теорема 2: (об асимптотической устойчивости) Если для системы (**) существует знакоопределенная функция V(x, t), полная производная которой по времени, найденная в силу системы (**), будет также знакоопределенной, знака противоположного с V(x, t), то положение равновесия будет асимптотически устойчивым.
 метода Ляпунова. В соответствии")
Исследования устойчивости с помощью функции Ляпунова получило название второго (прямого) метода Ляпунова. В соответствии с представленными теоремами для оценки устойчивости можно построить знакоопределенную функцию и убедившись в отрицательной определенности ее производной доказать неустойчивость. Построение функции Ляпунова на основе матрично-векторной модели. Наибольшее распространение получила квадратичная форма функции Ляпунова: — положительно определенная симметричная матрица Условие определенной положительности квадратичных форм задается неравенствами Сильвестра, согласно которых, проверка знакоопределенности функций Ляпунова делается очень легко. Считается что если собственные числа матрицы Q положительны.

Т. к. функция Ляпунова в n-мерном пространстве, то она является функцией n-переменных, которые зависят от времени, поэтому производная по времени от функции квадратичной формы определяется как производная от сложной функции. — уравнение Ляпунова (***), где L – положительно определенная матрица.

Теорема Ляпунова для линейных систем. Для того, чтобы системная матрица A принадлежала устойчивой системе необходимо и достаточно, чтобы полученное уравнение (***) имело положительно определенное решение при любой «+» определенности матрицы L. Таким образом, задавшись любой положительно определенной матрицей L , можно построить функцию Ляпунова (для линейных систем с устойчивой матрицей A (***) существует всегда). 1) т. е. она является симметричной 2) наблюдается взаимно-однозначное При построении функции Ляпунова рекомендуется задавать матрицу L в диагональной форме записи, по диагонали стоят собственные числа, определяется знак матрицы, а выше и ниже диагонали нули, определяющие симметричность матрицы.
 т. к. функция Ляпунова является определенной")
В Mat. Lab это функция — lyap(A, L) т. к. функция Ляпунова является определенной положительной, а ее производная определенно отрицательной, то согласно теореме Ляпунова система является асимптотически устойчивой.

Оценка качества переходных процессов с использованием функции Ляпунова. Оценка времени затухания возмущенного движения. Функция Ляпунова наряду с основной задачей получения достаточных условий устойчивости могут использоваться также для оценки отдельных показателей качества, т. е. качества собственных движений замкнутой системы. — наименьшее и наибольшее собственные числа матрицы Q. После дифференцирования, интегрирования и экспонирования получится неравенство вида: (*. 1) t – время; — значение функции Ляпунова для определенных начальных условий.
 следует верхняя оценка времени затухания переходного процесса, как время достижения")
Из выражения (*. 1) следует верхняя оценка времени затухания переходного процесса, как время достижения и не выхода за Если в выражении (*. 1) вместо х подставить — окрестность. можно получить оценку переходного процесса. (*. 2) Если требуется нижняя оценка времени затухания возмущенного движения, то используют (*. 1). Выводы по использованию второго метода Ляпунова. 1) Является эффективным методом оценки устойчивости систем управления без решения их математических моделей, даже в нелинейном случае, а для линейных систем существуют регулярные алгоритмы построения функции Ляпунова для системы линейного порядка.
 Функция Ляпунова заключает в себе значительную информацию о качественных показателях решения математических моделей")
2) Функция Ляпунова заключает в себе значительную информацию о качественных показателях решения математических моделей системы, в частности позволяет определить пределы затухания переходных процессов. Пример: (применение прямого метода Ляпунова) т. к. система имеет второй порядок и является линейной, то можно использовать квадратичную форму записи функции Ляпунова. Для обеспечения положения определенности функции Ляпунова необходимо взять

Для обеспечения отрицательной определенности производной функции Ляпунова необходимо выполнить условие, т. е. приравнять коэффициенты, которые мы имеем: (но дополнительным условием нужно, чтобы — положительно) (*. 3) – условие обеспечения устойчивости для системы второго порядка.

Математическое описание и исследование дискретнонепрерывных систем управления. Общие сведения о дискретно-непрерывных системах. Интенсивное развитие современных средств вычислительной техники привело к появлению и внедрению в инженерную практику цифровых ЭВМ, в связи с чем возник новый класс систем управления. Внедрению таких систем способствовало создание микропроцессоров и построение на их основе микро -ЭВМ. Методы проектирования таких систем существенно отличаются от классических методов, применяемых при анализе и синтезе непрерывных систем. Это связано с тем, что основой математического аппарата проектирования цифровых систем являются разностные уравнения, которые заменяют дифференциальные уравнения, описывающие непрерывные системы. Методы с использованием обычного преобразования Лапласа, заменяются различными формами z-преобразования. Затем алгоритмы, применяемые при расчете цифровых систем, в частности построение дискретно-непрерывных моделей, зачастую могут быть использованы только с помощью ЭВМ.
 объект и дискретно работающее")
Таким образом промышленная цифровая система управления всегда содержит непрерывный (аналоговый) объект и дискретно работающее устройство управления. Согласование этих разнообразно работающих устройств осуществляется с помощью АЦП и ЦАП. ДНСУ (дискретно-непрерывная система управления) такая система содержит хотя бы один преобразователь аналогового сигнала в дискретную форму. Устройства, с помощью которых аналоговый сигнал преобразуется в дискретный называются квантователями. Процесс преобразования называется квантованием. Квантование бывает трех типов: 1) по уровню; 2) по времени; 3) смешанное. По форме представления квантованного сигнала в дискретном виде различают: 1) импульсный; 2) релейный; 3)цифровой. При этом импульсное квантование связано с квантованием по времени, релейное — по уровню, смешанное — с цифровым.

Иногда смешанное квантование приводит к тому, что после импульсного представления сигнала, он затем преобразуется в релейную форму (с помощью фиксаторов или экстраполяторов). Поскольку квантование производится через некоторые переменные или постоянные промежутки времени, то квантованный сигнал представляется последовательностью импульсов прямоугольной формы. Формирование дискретного сигнала осуществляется посредством пропускания непрерывного сигнала через ключ, который периодически, с тактом квантования Т (период), замыкается на время , которое называется длительностью импульса. 0 0 Одним из основных параметром дискретного сигнала является скважность:

Любой из параметров импульсной последовательности порознь или вместе может быть функцией измеряемого сигнала. Если T= const, то процесс квантования является синхронным, иначе — асинхронным. В зависимости от того какой параметр используется для информационного представления системы различают типы модуляции: амплитудно-импульсную, широтноимпульсную и время-импульсную модуляцию. Если длительность импульса существенно меньше Т, то последовательность импульсов xd(t) можно рассматривать как дискретный сигнал. 0 0 Ключ действует как идеальный квантователь
Появление ЭВМ и внедрение ее в технику управления. 2)Повышенная")
Причины построения дискретно-непрерывных систем управления: 1)Появление ЭВМ и внедрение ее в технику управления. 2)Повышенная чувствительность, высокая надежность, отсутствие дрейфа, высокая помехоустойчивость по сравнению аналоговыми, кроме того, небольшие габариты и масса, низкая стоимость и удобство при программировании. 3)Экономичность, связанная с высокой гибкостью по сравнению с аналоговыми регуляторами, заключающаяся в изменении программноцифрового сигнала или адаптации к характеристикам цифрового управления без каких-либо изменений в аппаратных средствах. 4)Возможность работы в режиме разделения времени (позволяет по одному и тому же каналу передавать несколько различных сигналов). 5)В период между моментами квантования дискретная система движется как разомкнутая, что упрощает анализ системы, особенно для нелинейных систем. В период размыкания системы возможно решение различных фоновых задач на ЭВМ.
 Дискретизируем сигнал")
Получение матрично-векторных математических моделей ДНСУ Пусть матрично-векторная модель имеет вид: (*) Дискретизируем сигнал
, кроме того, что")
Последнее выражение по математической записи ничем не отличаются от исходного (*), кроме того, что в него входят дискретные управляющие воздействия, имеющие разрыва первого рода. Вторым этапом получения математической модели ДНСУ является отражение в ней факта съема информации о состоянии объекта. А так как состояние объекта характеризуется некоторым абстрактным вектором состояния x, элементы которого в общем случае не наблюдаются, и в реальных системах оцениваются по текущим значениям u и y. Можно считать, что и на выходах объекта по состоянию также стоят устройства дискретизации, состоящие из квантователей и фиксаторов.
 на дискретную переменную простой подстановкой нельзя, поскольку в моменты квантования,")
Заменить в уравнении (*) на дискретную переменную простой подстановкой нельзя, поскольку в моменты квантования, переменные состояния имеют бесконечные значения производной. В связи с этим переход осуществляется по формуле Коши. — системная матрица дискрено-непрерывного объекта. Элементы этой матрицы являются зависимыми от периода дискретизации.

Пример: Дана переходная матрица непрерывной системы. Уравнения наблюдений, в отличии от состояния останутся прежними. Для упрощения математической записи ДНСУ часто применяют прием нормирования по независимому аргументу. (***) Система записана для стационарного объекта. Если объект не стационарный, то матрицы входящие в систему становятся зависимыми от момента времени K.
, то, как")
Переходные уравнения состояния ДНС Если состояния и движения системы описываются уравнением (***), то, как показано ранее системная матрица ДНСУ имеет вид. Форма этого выражения показывает, что функция будет сходится асимптотически только в том случае, если матрица А имеет все собственные числа с отрицательной вещественной частью. Для определения переходной матрицы дискретной системы можно применить итерационную процедуру, поскольку первое уравнение в системе (***) записано для момента времени K и K+1, где К – произвольный текущий момент, то его можно сдвинуть на любое число позиций в левой и правой части одновременно. Устойчивость ДНСУ будет определяться тем: затухающая, ограниченная или расходящаяся функция матрицы перехода. Поскольку в последнем выражении системная матрица AT может быть представлена в любой эквивалентной форме, то ее можно привести к диагональной форме.

По диагонали такой матрицы стоят ее собственные числа, а при перемножении диагональных матриц по диагонали оказываются соответствующие степени диагональных элементов. Естественно, что сходимость каждого элемента матрицы будет обеспечена при условии: При этом условии все элементы матрицы будут стремиться к 0, а сама матрица — к нулевой матрице. Если какой — то из корней = 1, то получится ограниченная матрица (астатическая система). При наличии хотя бы одного корня больше 1 соответствующий элемент матрицы при стремится к , и вся матрица оказывается неограниченной. Пример: Непрерывная динамическая система имеет системную матрицу вида: Необходимо определить системную матрицу ДНСУ. Для решения задачи необходимо определить переходную матрицу непрерывной системы и осуществив дискретизацию получить дискретную матрицу.

Преобразуем системную матрицу к диагональной форме записи. Будем считать, что объект системной матрицы А снабжен техническими устройствами дискретизации по входу и выходу. Объект квантованный с периодом является устойчивым в дискретной области, т. к. диагональные элементы системной матрицы меньше 1, а объект с — устойчивым в дискретной области, но на границе устойчивости, т. к. диагональные элементы стремятся к единице.

Вычисление переходной матрицы состояния ДНСУ Вычисление переходной матрицы дискретных состояний путем последовательного перемножения матриц при большом шаге N требует слишком громоздких вычислений. Поэтому применяют различные способы, упрощения переходных матриц, либо вычисляют состояния на заданной области. Одним из способов вычисления переходных матриц является метод, приводящий процедуру определения степени к последовательному сложению матриц. Метод основан на теореме Гамильтона-Кэли: Любая квадратная матрица удовлетворяет собственному характеристическому уравнению. , т. е. для вычисления переходной матрицы на N-ном шаге достаточно иметь степени матриц вплоть до N-ной. продолжая эту процедуру можно получить матрицу любой степени.

Эквивалентные преобразования матрично-векторных моделей линейных ДНСУ: Преобразование дискретной модели из одного базиса в другой осуществляется по алгоритмам, идентичным непрерывным системам. 1) Каноническая форма записи При этой форме записи, каждая переменная состояния в k+1 момент времени зависит только в k-ый момент времени и от управления.
 Основная нормальная управляемая форма При такой форме записи связь между будущими и текущими")
2) Основная нормальная управляемая форма При такой форме записи связь между будущими и текущими значениями переменных состояния имеет следующий вид: каждая i-тая переменная состояния вплоть до n-1 на k+1 шаге совпадает со значениями i+1 на k-том шаге, таким образом имея значение на n шагов квантования в данном базисе можно получить состояние системы в начальный момент.
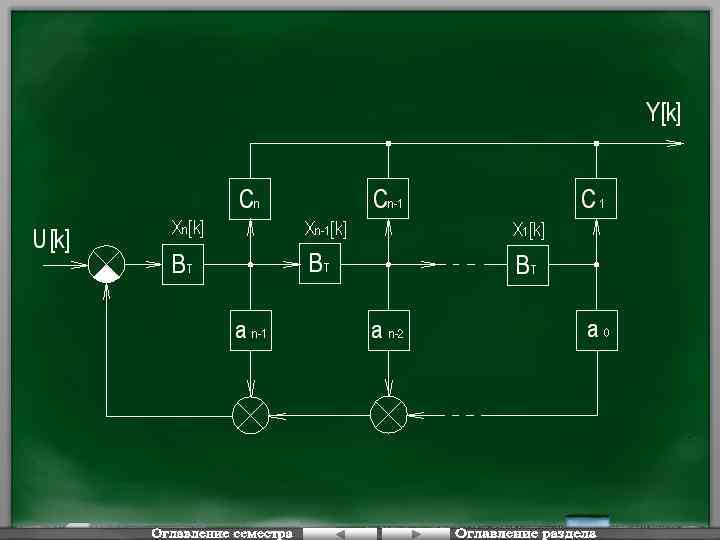

Оценка фундаментальных свойств ДНСУ как и непрерывные системы оцениваются на устойчивость, управляемость и наблюдаемость. Оценка управляемости: составляется матрица управляемости и оценивается ее ранг. Оценка наблюдаемости: далее оценивается ранг. Оценка устойчивости: Областью устойчивости является окружность единичного радиуса.

Математические модели процессов в ДНСУ Основной особенностью математического описания процессов, протекающих в дискретной системе является наличие взаимодействия между дискретной и непрерывной частями. В зависимости от формы математического описания этого процесса и принимаемых при этом допущений могут меняться формы математических моделей. Понятие идеального квантователя: Наиболее распространенным математическим методом описания дискретных функций является замена последовательности импульсов, чаще всего прямоугольных, полученных при квантовании решетчатой функции состоящей из идеальных импульсов. Если продолжительность замыкания ключа значительно меньше периода Т, то импульсы дискретной последовательности можно приближенно заменить идеальными импульсами идеальной площади: Решетчатая функция физически нереализуема. Введение идеального квантователя позволяет значительно упростить математический аппарат. Пусть , тогда сигнал

При анализе дискретных систем с ключами синхронно работающими на входе и выходе, продолжительность замыкания фактически не играет роли, если за ключом стоит экстраполятор. Отсюда следовательно выходные сигналы умножаются на идеальные импульсы.

Применение преобразования Лапласа для анализа дискретных сигналов Преобразуем по Лапласу сигнал Очевидно, что подынтегральное выражение не равно 0 при , при этом остается постоянным. Из выражя видно, что функция является периодической с частотой повторенияени Теорема прерывания: Если непрерывный сигнал имеет ограниченную полосу частот, его преобразование Фурье удовлетворяет условиям: 0 0

Предположим, что сигнал подвергается квантованию с малым периодом Т, после чего аппроксимируется последовательностью. Если величина Т достаточно мала, то преобразование Фурье распадается на “основной спектр” и совокупность повторяющихся с периодом “дополнительных спектров”. 0 0 Таким образом, в спектре квантованного сигнала по сравнению со спектром непрерывного появляются дополнительные высокочастотные составляющие. Операция восстановления исходного сигнала по изображению может быть выполнена без ошибки только при условии: Если же частота квантования не достаточно велика, т. е. , то на основной сигнал накладываются дополнительные спектры и точнее выделение исходного спектра становится невозможным. — теорема о прерывании Котельникова. В теории цифрового управления частота называется Шенноновской: определяет полосу пропускания дискретной системы.

Анализ качества дискретных систем: Для анализа качества функционирования ДНС используются такие же показатели качества, как и коэффициенты ошибок, непрерывной системы: время регулирования, запасы устойчивости по модулю и фазе, колебательность. На качество и на фундаментальные свойства ДНС существенно влияет период дискретизации, поэтому выбор периода дискретизации является важным этапом анализа и синтеза ДНСУ. Анализ качества во временной области: Замечание: сложность анализа качества ДНСУ состоит в том, что отсутствует информация о поведении системы между тактами квантования, в этих случаях используют модифицированное z – преобразование. Связь показателей качества ДНСУ с корнями имеет более сложный вид, чем в непрерывном случае.

0 0

Выделение области с заданной степенью устойчивости: 0 0
: 0 0")
Выделение области равной степени затухания (или колебательности): 0 0
Наблюдатели полного порядка
Рассмотрим
описание системы в стандартном виде:
![]()
В
реальных системах r<n, т.е. число
измеряемых координат меньше размерности.
Обычноr— число датчиков и их всегда
меньше числа координат состояния.
Для
того чтобы реализовать закон управления
в виде
![]() необходимо знать все координаты
необходимо знать все координаты
состояния. Чтобы знать недостающие
координаты необходимо дополнительное
устройство, их определяющее. Таким
устройством является наблюдатель.
Наблюдатель
вводится в систему для оценки переменных
состояния по реально измеряемым
координатам.
С точки
зрения реализации наблюдатель — это
математический объект, который описывается
соответствующими дифференциальными
уравнениями.
Обозначим
![]() —
—
оценка вектора состояния![]() .
.![]() — это координаты наблюдателя, которые
— это координаты наблюдателя, которые
можно использовать. Таким образом,
наблюдатель представляет модель
системы.
Рассмотрим
дифференциальное уравнение:
![]() ,
,
еслиАиВтакие же, как у исходной
системы, то это есть модель исходной
системы:
 uy
uy
![]()
Рис. 9.4 Схема объекта с моделью
Можно
ли такую модель непосредственно
использовать для получения оценок
состояния? Рассмотрим ошибку:
![]() .
.
Дифференциальное уравнение для ошибки
получим вычитанием из уравнения модели
уравнения системы:
![]()
Если
![]() начальная ошибка.
начальная ошибка.![]() — начальное состояние объекта, то
— начальное состояние объекта, то![]() .
.
Из этого уравнения следует, что процесс
изменения ошибок полностью определяется
матрицей системыА. Это плохо, т.к.
если система неустойчива (т.е. имеет
собственные значения в правой
полуплоскости) или собственные значения
имеют малую отрицательную вещественную
часть то и ошибка наблюдателя будет
расходиться, либо меняться слишком
медленно.
Вывод:
Наблюдатель, представляющий модель
системы, практически никогда не удается
использовать из-за характера изменения
ошибок наблюдения, полностью определяемого
матрицей динамики системыА.
Модифицируем
модель системы введя матрицу К,
умноженную на разность![]() :
:
![]() .
.
Решением
этого уравнения является:
![]() .
.
Задавая
матрицу наблюдения Kможно получить
различные процессы изменения ошибок
наблюдения во времени.
Чтобы
ошибка наблюдения стремилась к нулю
необходимо соответствующим образом
выбрать собственные значения матрицы![]() ,
,
а именно: они должны иметь отрицательную
вещественную часть; и соответственно
насчитать матрицу наблюдателяК.
Матрицу
Кбудем засчитывать по желаемым
собственным значениям и векторам матрицы![]() ,
,
и этот расчет аналогичен расчету матрицы
обратной связи по вектору состояния.
Сравнение:
![]() —
—
модальный синтез, определяетсяL
Для
наблюдателя
![]() рассчитывается
рассчитывается
матрицаK.
Получим
основные соотношения. Схема замкнутой
системы с наблюдателем будет иметь вид:

Рис. 9.5 Схема замкнутой системы с
наблюдателем
Основные соотношения наблюдателя полного порядка
Соотношения
для наблюдателя аналогичны соотношениям
для модального синтеза с некоторыми
особенностями. Чтобы не путать, вводят
новые обозначения.
Основное утверждение
Матрица
![]() подобна жордановой матрице
подобна жордановой матрице![]() тогда и только тогда, когда существует
тогда и только тогда, когда существует
невырожденная матрица![]() и вспомогательная матрица
и вспомогательная матрица![]() такие, что выполняются следующие
такие, что выполняются следующие
соотношения:
![]()
Доказательство
аналогично модальному синтезу, но
повторим для закрепления.
а)
Необходимость:
![]() —
—
из определения подобия, тогда умножив
слева на![]() получим:
получим:![]() ,
,
обозначим![]() или
или![]() ,
,
имеем:
![]() .
.
б)
Достаточность: имеем
![]() и
и![]() ,
,
тогда![]() подставив его в первое уравнение имеем:
подставив его в первое уравнение имеем:![]() ,
,
далее:![]() ,
,
умножим слева на![]()
![]() ,
,
что и требовалось доказать.
Соседние файлы в папке ОТУ студентам
- #
- #
- #
- #
- #
- #
- #
- #