Недочеты в обучении ML-алгоритмов часто приводят к забавным казусам. Например, айфон моего друга определяет его собаку как кошку. Или вот эти два парня, которые не могут воспользоваться лифтом с голосовым управлением, потому что он не понимает их акцент. Или то, как Amazon Alexa пыталась заказать сотни кукольных домиков, потому что приняла выпуск новостей за голос своего владельца. Еще появились шутки про покупку Whole Foods компанией Amazon, которые тоже отлично передают суть дефективных алгоритмов.

Джефф Безос: Алекса, купи мне что-нибудь из Whole Foods.
Alexa: Покупаю Whole Foods.
Безос: ЧТОООО… а, ладно, валяй.
Ключевой принцип науки о данных
Пока я заканчивала работу над обучающей программой Galvanize Data Science, мне пришлось провести немало времени за изучением такого явления, как ошибка алгоритма.
Я сотрудничала с организацией, которая помогает бывшим заключенным вернуться к обучению и таким образом снижает вероятность повторного совершения преступлений. Мне дали задание рассчитать полную стоимость тюремного заключения, то есть прямые и косвенные затраты на содержание одного человека в исправительном учреждении.
При изучении темы я натолкнулась на статью под названием «Машинная ошибка» (Machine Bias), в которой рассказывается о том, что в алгоритмы оценки рисков заложены расовые предрассудки. Оказалось, что из-за алгоритма, который выдает чрезвычайно много ложных положительных результатов для афроамериканцев, людей отправляют за решетку на более долгий срок и не дают права на досрочное освобождение. Деньги налогоплательщиков уходят на содержание в тюрьмах тех, кто на свободе мог бы служить на благо общества, при этом их дети попали в систему государственной опеки.
Из-за необъективного алгоритма люди теряют работу и связи, а после выхода из тюрьмы вынуждены начинать жизнь сначала. В то же время те, кто более способен на преступление, остается на свободе, потому что алгоритм остается слеп к их предрасположенности к криминалу.
Из-за чего появляются эти ложные положительные и отрицательные ответы и так ли это важно? Для начала давайте определим три термина из Матрицы ошибок: точность, полнота и доля правильных ответов.
Точность
Точность – это процент верно классифицированных положительных ответов. При высокой точности алгоритм правильно размечает максимальное количество верных элементов. К примеру, инструменты медицинской диагностики должны быть очень точными, так как болезнь может осложниться, если ее вовремя не обнаружить.
В ситуации, когда время настолько ценно, нужно минимизировать количество ложных негативных откликов. Точно так же, если в системе вашей компании произойдет сбой, лучше иметь точную модель, чтобы:
- устранить проблему,
- найти виновника как можно быстрее, чтобы не отрывать сотрудников от исполнения их обязанностей.
Полнота
В свою очередь, полнота – это доля в процентах возвращенных релевантных элементов. К примеру, если искать в гугле книги из серии про Гарри Поттера, возврат будет равен количеству книг, разделенному на семь.
В идеале полнота равна единице. В этом случае нас ждут проблемы, и пользователям придется вручную копаться в нерелевантных результатах поиска. Вдобавок к этому, если пользователь не получит релевантной выдачи, он вряд ли станет что-то покупать, и это навредит финансовым показателям.
Доля правильных ответов
Рассчитывается как доля верных предсказаний от общего количества элементов в процентах. Этот показатель нельзя считать индикатором качества работы модели, особенно если классы разбалансированы. Чтобы работа с точностью, полнотой, долей правильных ответов и матрицами ошибок имела смысл, обучающие данные должны содержать достоверную информацию о населении, и тогда модель сможет обучиться правильно.
| n=165 | Предсказание: НЕТ | Предсказание: ДА |
| В действительности: НЕТ | 50 | 10 |
| В действительности: ДА | 5 | 100 |
Матрицы ошибок
Матрицы ошибок – это основа матриц эффективности затрат, то есть итоговой стоимости. Для бизнеса этот термин понять легко на примере анализа доходов и расходов. Думаю, в случае с дискриминацией одного класса относительно другого все будет сложнее.
Тем не менее эта работа, пожалуй, даже более срочная и важная. Нашим продуктам уделяют все больше внимания, и ошибки будут все более заметными и значимыми для компаний.
Ошибки машинного обучения, вызванные исходными данными
Крупнейший по объему этап работы в машинном обучении – это сбор и очищение данных, на которых будет учиться модель. Преобразование данных – это не так уж интересно, и постоянно думать о формировании отсчетов, выбросах и распределении генеральной совокупности может быть скучным и утомительным делом. Однако затем из-за таких упущений при обработке данных и появляются ошибки алгоритмов.
Каждый день в мире генерируется 2,5 эксабайт информации, так что данных для обучения наших моделей предостаточно. Есть фотографии лиц с разным цветом кожи, в очках и без них, с широкими или узкими, карими или серыми глазами.
Источник: Giphy
Существуют мужские и женские голоса с самыми разными акцентами. Нежелание принимать во внимание эти культурные особенности данных может привести нас к моделям, которые будут игнорировать, и таким образом маргинализировать, определенную демографическую группу. К примеру, тот случай, когда алгоритм от Google по ошибке принимал лица афроамериканцев за горилл. Или подушки безопасности, которые должны защищать пассажиров, едва не убивали женщин в аварийной ситуации. Эти ложноположительные отклики, то есть заключения алгоритма о том, что все в порядке, когда риск действительно есть, могут стоить кому-то жизни.
Человеческий фактор
Недавно одна моя подруга – инженер ПО – узнавала у консультанта по развитию карьеры, стоит ли ей использовать в резюме и LinkedIn гендерно-нейтральное второе имя, чтобы быстрее найти работу. У ее опасений есть основания: в профессиональном мире сознательные и подсознательные гендерные предрассудки очень сильны. Был случай, когда мужчина и женщина на время обменялись почтовыми адресами и заметили, что отношение к ним в переписке значительно изменилось.
Как бороться с ошибками машинного обучения
Между тем, если нам предстоит обучать машины работе с LinkedIn и резюме, то появляется научный инструмент борьбы с предрассудками, победить которые люди не в состоянии. Некорректные алгоритмы оценки рисков появляются из-за обучения моделей по наборам данных, уже содержащим эти перекосы вследствие исторических причин. Это можно исправить, если работать с историческими предрассудками так, чтобы модель учитывала пол, возраст и расу человека без дискриминации какого-либо меньшинства.
Данные, которые содержатся в моделях обучения с подкреплением, могут привести к резкому улучшению или ухудшению результатов. Экспоненциальный рост или падение качества может привести к более надежным беспилотным автомобилям, которые учатся при каждой своей поездке, или же они могут убедить человека из Северной Каролины в существовании в Вашингтоне банды по торговле людьми, которой на самом деле нет.
Почему машины начинают ошибаться? Мы учим их этому, используя ошибочные тренировочные данные.
Источник
Материалы по теме:
Кто и зачем использует слабый искусственный интеллект
Искусственный интеллект научился определять сексуальную ориентацию по фотографии
Линейная алгебра помогла найти в языке скрытый сексизм
Виртуальные ассистенты часто терпят сексуальные домогательства
Фото на обложке: Франческо Дацци/Shutterstock
Во многих популярных курсах машинного и глубокого обучения вас научат классифицировать собак и кошек, предсказывать цены на недвижимость, покажут еще десятки задач, в которых машинное обучение вроде как отлично работает. Но вам расскажут намного меньше (или вообще ничего) о тех случаях, когда ML-модели не работают так, как ожидалось.
Частой проблемой в машинном обучении является неспособность ML-моделей корректно работать на большем разнообразии примеров, чем те, что встречались при обучении. Здесь идет речь не просто о других примерах (например, тестовых), а о других типах примеров. Например, сеть обучалась на изображениях коровы, в которых чаще всего корова был на фоне травы, а при тестировании требуется корректное распознавание коровы на любом фоне. Почему ML-модели часто не справляются с такой задачей и что с этим делать – мы рассмотрим далее. Работа над этой проблемой важна не только для решения практических задач, но и в целом для дальнейшего развития ИИ.
Конечно, этим проблемы машинного обучения не ограничиваются, существуют также сложности с интерпретацией моделей, проблемы предвзятости и этики, ресурсоемкости обучения и прочие. В данном обзоре рассмотрим только проблемы обобщения.
Содержание
Проблемы обобщения
Задача обобщения в машинном обучении
Утечка данных
Shortcut learning: «right for the wrong reasons»
Shortcut learning в языковых моделях
Уровни обобщения моделей машинного обобщения
Состязательные атаки
Проблема неконкретизации в ML-задачах
Выводы
Способы решения проблем обобщения
Стресс-тесты для диагностики работы модели
Доменная адаптация
Еще больше данных?
Более крупные или более эффективные модели?
Модификации способов обучения языковых моделей
Архитектура моделей и структура данных
Направления исследований
Общий искусственный интеллект
Заключение
Проблемы обобщения
Задача обобщения в машинном обучении
Задача машинного обучения заключается в написании алгоритмов, которые автоматически выводят общие закономерности из частных случаев (обучающих примеров). Этот процесс называется обобщением (generalization), или индукцией. Часто требуется найти зависимость между исходными данными  и целевыми данными
и целевыми данными  в виде функции
в виде функции  .
.
Например, требуется определить по фотографии тип или положение изображенного объекта. Для решения этой задачи можно собрать большое количество размеченных данных (supervised learning), можно также использовать ненадежно размеченные данные (weakly-supervised learning), например фотографии из Instagram c хештегами, или даже неразмеченные данные (self-supervised learning). Но в любом случае мы используем некий набор конкретных примеров.
Понятно, что чем больше доступно примеров, тем выше будет качество полученного решения (при прочих равных условиях). Больше данных – выше точность. Все логично?
Существуют даже теоремы, доказывающие для различных ML-алгоритмов стремление получаемого решения к идеалу при неограниченном увеличении количества обучающих данных и размера модели (это свойство называется universal consistency; например, для нейронных сетей см. Faragó and Lugosi, 1993). При доказательстве подобных теорем считается, что данные  берутся из некоего фиксированного, но неизвестного распределения
берутся из некоего фиксированного, но неизвестного распределения  . Такой подход называется statistical learning framework, он излагается почти в любой книге по машинному обучению (например, см. Deep Learning book, раздел 5.2, есть также русское издание).
. Такой подход называется statistical learning framework, он излагается почти в любой книге по машинному обучению (например, см. Deep Learning book, раздел 5.2, есть также русское издание).
С развитием технологий стали доступны дешевые вычисления и огромные объемы данных, что позволило эффективно решать очень сложные задачи. Например, языковая модель GPT-3 (Brown et al., 2020) от компании OpenAI обучалась на 570 Гб текстов и имеет 175 миллиардов параметров, по приблизительным подсчетам обучение стоило миллионы долларов. Примеры текстов, которые генерирует GPT-3, можно найти здесь, здесь, здесь и здесь. В Google обучили сеть с 1.6 триллиона параметров (Fedus et al., 2021), в Китае – сеть с 1.75 триллиона параметров, и это далеко не предел: уже делаются попытки обучать сеть со 120 триллионами параметров, что примерно равно количеству синапсов в человеческом мозге. Более крупные модели и больше обучающих данных — выше точность.
Казалось бы, что может пойти не так?
Рассмотрим несколько примеров, когда простого увеличения объема обучающих данных может оказаться недостаточно. Начнем с проблемы утечки данных, и затем рассмотрим более общую проблему ограниченного разнообразия обучающих данных и ситуации, когда модель лишь «делает вид», что обучается.
Утечка данных
Утечкой данных называется ситуация, когда существует некий признак, который при обучении содержал больше информации о целевой переменной, чем при последующем применении модели на практике. Утечка данных может возникать в самых разных формах.
Пример 1. При диагностике заболеваний по рентгеновским снимкам модель обучается и тестируется на данных, собранных с разных больниц. Рентгеновские аппараты в разных больницах выдают снимки с немного разной тональностью, при этом различия могут быть даже незаметны человеческим глазом. Модель может обучиться определять больницу на основе тональности снимка, а значит и вероятный диагноз (в разных больницах лежат люди с разными диагнозами), при этом вообще не анализируя изображение на снимке. Такая модель покажет отличную точность при тестировании, так как тестовые снимки взяты из той же выборки данных.
Пример 2. В задаче диагностики реальных и фейковых вакансий почти все фейковые вакансии относились к Европе. Обученная на этих данных модель может не считать подозрительными любые вакансии из других регионов. При применении на практике такая модель станет бесполезна, как только фейковые вакансии станут размещаться в других регионах. Конечно можно удалить регион из признаков, но тогда модель будет пытаться предсказать регион по другим признакам (скажем, по отдельным словам в описании и требованиях), и проблема сохранится.
Пример 3. В той же задаче есть признак «имя компании», и у компаний может быть по нескольку вакансий. Если компания фейковая, то все ее вакансии фейковые. Если мы разделим данные на обучающую и тестовую часть (или на фолды) таким образом, что вакансии одной и той же компании попадут и в обучающую, и в тестовую часть, то модели достаточно будет запомнить имена фейковых компаний для предсказания на тестовой выборке, в результате на тесте мы получим сильно завышенную точность.

Все описанные проблемы нельзя решить просто увеличением количества обучающих данных без изменения подхода к обучению. Здесь можно возразить, что утечка данных не является проблемой самих ML-алгоритмов, поскольку алгоритм и не может знать о том, какой признак нужно учитывать, а какой нет. Но давайте посмотрим на другие похожие примеры.
Shortcut learning: «right for the wrong reasons»
В начале XX века жила лошадь по имени Умный Ганс, которая якобы умела решать сложные арифметические задачи, постукивая копытом нужное число раз. В итоге оказалось, что лошадь определяет момент, когда нужно прекращать стучать копытом, по выражению лица того, кто задает вопрос. С тех пор имя «умного Ганса» стало нарицательным (1, 2) – оно означает получение решения обходным путем, не решая при этом саму задачу в том смысле, какой мы хотим. Такое обходное «решение» внезапно перестает работать, если меняются условия (например, человек, задающий вопрос лошади, сам не знает ответа на него).
Исследователи давно заметили, что многие современные модели глубокого обучения похожи на «умного Ганса». Вспомним хотя бы легендарную статью на Хабре про «леопардовый диван»:
… Где-то в этот момент в мозг начинает прокрадываться ужасная догадка — а что если вот это различие в текстуре пятен и есть главный критерий, по которому алгоритм отличает три возможных класса распознавания [леопарда, ягуара, гепарда] друг от друга? То есть на самом деле сверточная сеть не обращает внимания на форму изображенного объекта, количество лап, толщину челюсти, особенности позы и все вот эти тонкие различия, которые, как мы было предположили, она умеет понимать — и просто сравнивает картинки как два куска текстуры?
Это предположение необходимо проверить. Давайте возьмем для проверки простую, бесхитростную картинку, без каких-либо шумов, искажений и прочих факторов, осложняющих жизнь распознаванию. Уверен, эту картинку с первого взгляда легко опознает любой человек.

… Похоже, что наша догадка насчет текстуры близка к истине. … Я сделал еще пару проверок (Microsoft, Google) — некоторые из них ведут себя лучше, не подсовывая ягуара, но победить повернутый набок диван не смог никто. Неплохой результат в мире, где уже мелькают заголовки в духе «{Somebody}’s Deep Learning Project Outperforms Humans In Image Recognition».
В самом деле, зачем модели, решающей задачу классификации, выучивать форму и другие комплексные свойства объекта, называемого «леопард», если простое присутствие нужной текстуры на изображении дает почти 100%-ю точность выявления леопарда в обучающей (и тестовой) выборке из ImageNet?
То же самое касается предсказания объекта с учетом фона. Мы не закладывали при обучении никакой информации о том, на основании чего мы хотим получать предсказание: на основании объекта или окружающего его фона. Было даже обнаружено (Zhu et al., 2016), что нейронные сети способны с хорошей точностью предсказывать класс объекта, если сам объект вырезан и оставлен только фон.
Shortcut learning — явление, когда модели получают верный ответ с помощью неверных в общем случае рассуждений («right for the wrong reasons»), которые хорошо работают только для обучающего распределения данных. Поскольку обучающая и тестовая выборка обычно берутся из одного распределения, то такие модели могут давать хорошую точность и при тестировании.
Shortcuts are decision rules that perform well on standard benchmarks but fail to transfer to more challenging testing conditions, such as real-world scenarios.
Другие примеры можно найти в замечательной статье Shortcut Learning in Deep Neural Networks (Geirhos et al., 2020), опубликованной в журнале Nature и основанной на обобщении информации из более чем 140 источников.
Смена угла поворота объекта, появление его в необычном (с точки зрения обучающей выборки) окружении, добавление необычного шума может полностью испортить работу модели. На иллюстрации ниже слева показаны пары изображений, одинаково классифицируемые с точки зрения человека, но совершенно разные с точки зрения сверточной нейронной сети. Справа показаны, наоборот, изображения, имеющие одинаковый класс для нейронной сети и разный для человека.
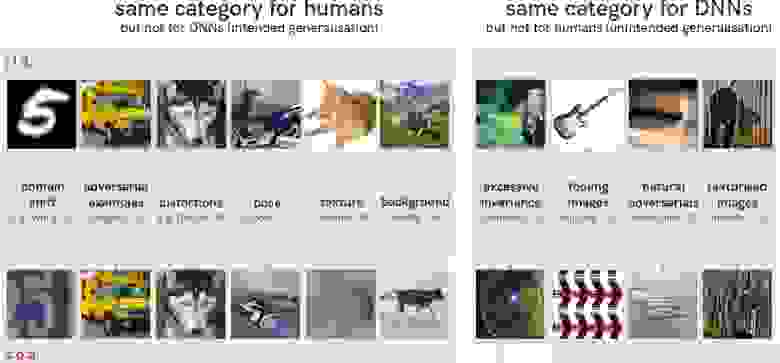
В целом исследователями был сделан вывод о том, что многие современные сверточные нейронные сети предпочитают ориентироваться на локальные участки текстур (Jo and Bengio, 2017; Geirhos et al., 2018), которые могут относиться как к объекту, так и к фону, и не классифицируют объект на основании его общей формы (Baker et al., 2018).
Сейчас нейронные сети начинают решать очень сложные задачи, такие как работа с трехмерными сценами, анимация объектов и прочее. Казалось бы, задача классификации собак и кошек уже давно решена? Оказывается, что нет. Как показано на примерах ниже, одна из самых современных нейронных сетей для детектирования объектов YOLOv5 может быть легко обманута необычными деталями, не относящимися к самому объекту, либо может принимать несколько объектов за один. Предсказания получены с помощью интерактивной версии YOLOv5, интерпретация выполнена с помощью Grad-CAM (Selvaraju et al., 2016; репозиторий). Оригиналы изображений можно найти по ссылкам: 1, 2, 3, 4.

Добавление собачьего корма в последнем изображении существенно повышает уверенность в распознавании собаки, хотя сам корм сеть распознает как «книгу». При этом на GradCAM зависимость ответа от наличия собачьего корма в кадре не видна, так как рамка ограничена рамкой объекта. В целом даже небольшие изменения, такие как кадрирование с обрезкой 5% фона или пересохранение в jpeg сильно меняет предсказание модели в сложных для нее случаях.
Сверточные сети для классификации, даже самые современные, часто классифицируют черных котов как породу собак схипперке (которые тоже имеют черную шерсть), даже если по морде и форме тела видно, что это кот. Имеются в виду, конечно, сети общего назначения, которые не дообучались специально для точного распознавания пород собак и кошек, хотя и в этом случае нет гарантии точного распознавания.
Jo and Bengio, 2017 используют фильтрацию, основанную на преобразовании Фурье, для внесения в изображения помех, которые не мешают распознаванию их человеком, но сильно снижают качество работы сверточных нейронных сетей. Увеличение глубины сетей не избавляет от этой проблемы. Более того, если добавить в обучающий датасет один из типов Фурье-искажений, то это не делает сеть устойчивее к другим типам Фурье-искажений (которых может быть очень много).
The current incarnation of deep neural networks exhibit a tendency to learn surface statistical regularities as opposed to higher level abstractions in the dataset. For tasks such as object recognition, … [this is] sufficient for high performance generalization, but in a narrow distributional sense.
To this end, we draw an analogy to adversarial training: augmenting the training set with a specific subset of adversarial examples does not make the network immune to adversarial examples in general. …we do not believe that this sort of data augmentation is sufficient for learning higher level abstractions in the dataset.
Shortcut learning в языковых моделях
Та же проблема есть и в языковых моделях. Например, модель BERT (Devlin et al., 2018) обучена на таком объеме текстов, который человек не прочитает за всю жизнь, но при этом она в основном выучивает поверхностные, стереотипные ассоциации слов друг с другом (word co-occurence), и вряд ли хорошо понимает смысл текста.
Some of BERT’s world knowledge success comes from learning stereotypical associations, e. g. a person with an Italian-sounding name is predicted to be Italian, even when it is incorrect. (Rogers et al., 2020)
Попробуем протестировать некоторые из наиболее популярных на сегодняшний день языковых моделей: RoBERTa (Liu et al., 2019), ALBERT (Lan et al., 2019) и mT5 (Xue et al., 2020), взяв для тестирования их крупные варианты из репозитория HuggingFace: roberta-large, albert-xxlarge-v2 и mt5-xl. Эти модели обучались на разных задачах, в числе которых была задача предсказания закрытых маской слов в тексте, называемая masked language model objective, или cloze task. Проверим их работу на различных примерах.
Примечание. Вы можете сами повторить эксперимент, используя окно «Hosted inference API» по приведенным выше ссылкам; для mT5 можно использовать этот ноутбук, требуется GPU с большим объемом памяти.

Как видим, модели иногда неплохо запоминают простые факты, но при этом все рассмотренные модели часто делают ошибки там, где нужно понимать логику повествования. Если логика повествования противоречит статистике совместной встречаемости слов, то модели обычно предпочитают статистику. Например, в последних двух примерах модель ALBERT вероятно работает так: если «approaches», то «discuss», если «approach», то «propose» – потому при обучении часто встречались такие сочетания. Слово «existing» при этом ее не смущает.
Здесь можно возразить, что слова, вставленные моделью, могут быть не цельными предложениями, а их частями, например «those who are eaten by whales are tiny animals», но этим нельзя объяснить все случаи в таблице.
Также можно возразить, что эти модели не обучались генерировать тексты без логических ошибок, они обучались воспроизводить реальные тексты, даже если в них есть ошибки. Но даже с учетом этого, те варианты слов, которые выбирают модели, часто оказываются абсурдны и практически не могли встретиться в написанных человеком текстах.
Вполне вероятно, что будь модели еще в 100 раз крупнее, обучаясь в 100 раз дольше и на большем объеме данных – они не совершили бы таких очевидных ошибок. Но даже эти модели очень большие (3.7 миллиарда параметров в mT5-XL) и обучались на сотнях гигабайт текстов, чему качество их работы на нетипичных примерах явно не соответствует – это наводит на мысль о неоптимальности подхода в целом.
Проблема shortcut learning присутствует и в тех моделях, которые специально дообучались для лидербордов GLUE (Wang et al., 2018) и SuperGLUE (Wang et al., 2019). Эти бенчмарки нацелены на измерение уровня «понимания естественного языка» моделями машинного обучения. SuperGLUE содержит 8 задач, на некоторых из которых уже побит уровень человека (имеется в виду средний уровень человека, отличающегося от разметчика, т. к. разметка тоже делалась людьми).
Но действительно ли уровень человека побит? Как выясняется, высокая метрика качества в SuperGLUE достигается в основном с помощью shortcut learning, при этом модели эксплуатируют систематические проблемы в разметке датасета для предсказания ответа «обходным путем» (Gururangan et al., 2018; Du et al., 2021), и мнение многих исследователей (1, 2, 3, 4 и др.) сходится в том, что на текущий момент языковые модели-трансформеры далеки от понимания смысла текстов в том смысле, в каком их понимает человек. Во введении мы рассматривали языковую модель GPT-3, имеющую огромный размер и генерирующую реалистичные тексты. Вот, что о ней думает Ян Лекун:
Some people have completely unrealistic expectations about what large-scale language models such as GPT-3 can do. … GPT-3 doesn’t have any knowledge of how the world actually works. It only appears to have some level of background knowledge, to the extent that this knowledge is present in the statistics of text. But this knowledge is very shallow and disconnected from the underlying reality. …trying to build intelligent machines by scaling up language models is like building a high-altitude airplanes to go to the moon. You might beat altitude records, but going to the moon will require a completely different approach.

Cовременные языковые модели вроде GPT-3 (а также Gohper, InstructGPT, Wu Dao и другие) не стоит переоценивать, но, как мне кажется, не стоит и недооценивать. Со многими задачами они действительно очень хорошо справляются. Поскольку данный обзор посвящен проблемам машинного обучения, то в нем делается акцент на недостатках текущих ML-моделей (а значит и путях дальнейших исследований), но и преимуществ у них тоже много.
Уровни обобщения моделей машинного обобщения
Почти любой датасет имеет ограниченное разнообразие и не покрывает всех ситуаций, в которых желательна корректная работа модели. Особенно это проявляется в случае сложных данных, таких как изображения, тексты и звукозаписи. В данных могут существовать «паразитные корреляции» (spurious correlations), позволяющие с хорошей точностью предсказывать ответ только на данной выборке без «комплексного» понимания изображения или текста.
Это как раз и есть рассмотренные выше предсказания на основе фона, отдельных текстурных пятен или отдельных рядом стоящих слов. Датасеты, в которых паразитные корреляции явно выражены, называются biased (предвзятыми). Пожалуй, что все датасеты в задачах CV и NLP в той или иной степени предвзяты.
В статье о shortcut learning (Geirhos et al., 2020) авторы рассматривают несколько уровней обобщения, которые могут достигать модели машинного обучения:

Uninformative features. Сеть использует признаки, которые не позволяют эффективно предсказывать ответ даже на обучающей выборке, например, нейронная сеть со случайно инициализированным выходным слоем.
Overfitting features. Сеть использует признаки, которые позволяют эффективно предсказывать ответ на обучающей выборке, но не на всем распределении, из которого получена эта выборка. Под «распределением» здесь понимается вероятностное совместное распределение  , из которого взяты данные (более подробно см. также этот обзор, раздел «распределение данных»).
, из которого взяты данные (более подробно см. также этот обзор, раздел «распределение данных»).
Shortcut features. Сеть использует признаки, которые позволяют эффективно предсказывать ответ на распределении данных  , из которого взята обучающая (и, как правило, тестовая) выборка. Поскольку выборка является набором независимых примеров, используется термин independent and identically distributed (i. i. d.). Способность алгоритма с хорошей точностью работать на некоем фиксированном распределении данных авторы называют i. i. d. обобщением. Как мы видели выше, для этого вовсе не обязательно уметь решать саму поставленную задачу в общем виде, часто можно использовать «обходные пути» или утечки данных.
, из которого взята обучающая (и, как правило, тестовая) выборка. Поскольку выборка является набором независимых примеров, используется термин independent and identically distributed (i. i. d.). Способность алгоритма с хорошей точностью работать на некоем фиксированном распределении данных авторы называют i. i. d. обобщением. Как мы видели выше, для этого вовсе не обязательно уметь решать саму поставленную задачу в общем виде, часто можно использовать «обходные пути» или утечки данных.
Intended features. Сеть использует признаки, которые позволяют эффективно предсказывать ответ в общем случае. Такие признаки будут хорошо работать и вне обучающего распределения данных, когда «обходные пути» закрыты (например, объект находится на необычном фоне, в необычной позиции, имеет необычную текстуру и пр.).
Ситуация, когда распределение данных отличается при обучении и применении называется сдвигом распределения данных (distributional shift). Иными словами, данные, на которых модель будет применяться, среднестатистически отличаются от тех, на которых модель обучалась и тестировалась. В частности, может идти речь о появлении новых типов примеров или изменении соотношения количества примеров разных типов. Это происходит из-за того, что обучающие данные часто недостаточно разнообразны и не покрывают все те типы примеров, на которых желательна корректная работа модели (либо покрывают их в неправильном соотношении).
Хорошая работа модели в условиях сдвига данных называется out-of-distribution обобщением (OOD generalization), она также известна под названием domain generalization (Zhou et al., 2021; Wang et al., 2021; см. также на paperswithcode.com), очевидна ее связь с преодолением проблемы shortcut learning.
If an image classifier was trained on photo images, would it work on sketch images? What if a car detector trained using urban images is tested in rural environments? Is it possible to deploy a semantic segmentation model trained using sunny images under rainy or snowy weather conditions? Can a health status classifier trained using one patient’s electrocardiogram data be used to diagnose another patient’s health status? … Indeed, without access to target domain data, training a generalizable model that can work effectively in any unseen target domain is arguably one of the hardest problems in machine learning. (Zhou et al., 2021)
Еще один типичный пример – системы распознавания лиц. В обучающем датасете, даже очень большом, может ни быть ни одного изображения человеческого лица, на которое нанесен некий рисунок. Модель, обученная на таком датасете, научится быть инвариантной к положению лица в кадре и его выражению, и почти безошибочно идентифицировать человека. Однако модель может перестать корректно работать в случае, если надеты необычные очки или на лицо нанесен рисунок, потому что изображений такого типа не встречалось при обучении (либо они встречались чрезвычайно редко и практически не оказали влияния на обучение).
В результате люди придумывают все новые и новые способы обманывать системы распознавания лиц, не пряча при этом полностью лицо. Модель не встречалась с такими изображениями при обучении и распознает лица неправильно, даже если человек на месте модели легко опознал бы знакомое лицо.

Конечно, распознавание лиц может не всегда использоваться во благо обществу, но здесь речь идет об общей проблеме систем машинного обучения. Эффективное out-of-distribution обобщение остается открытой проблемой, которую необходимо решать, если мы хотим дальнейшего развития ИИ. В целом, ее можно описать так:
Generalizing beyond one’s experiences – a hallmark of human intelligence from infancy – remains a formidable challenge for modern AI. (Battaglia et al., 2018)
Состязательные атаки
С работы Szegedy et al., 2013 начались исследования в области так называемых состязательных атак на нейронные сети (adversarial attacks). Авторы показали, что наложением на изображение незначительного шума можно заставить нейронные сети ошибаться в задаче классификации, предсказывая совсем другой класс. Конечно, для этого подходит не любой шум, а специальный паттерн шума, найти который можно с помощью оптимизации.
Еще более неожиданным оказалось то, что в точности тот же паттерн шума заставлял ошибаться на том же изображении и другие сети, обученные с другими гиперпараметрами и на других подвыборках обучающих данных. Кроме этого, авторы работы исследовали интерпретируемость фильтров промежуточных слоев сверточных сетей.
В дальнейшем было обнаружено (Kurakin et al., 2016), что «обманывать» модель с помощью зашумленных изображений можно даже в том случае, когда зашумленное изображение фотографируется камерой (см. видео). При этом разные модели удается обманывать одним и тем же паттерном шума, что позволяет осуществлять подобные атаки (с переменным успехом) даже тогда, когда используемая модель неизвестна.
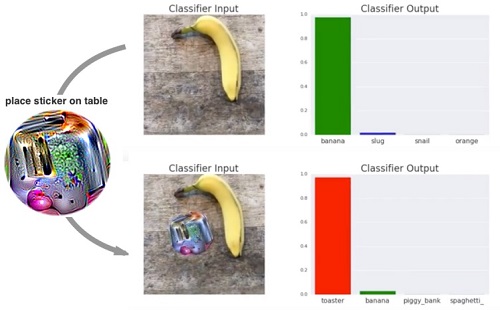
В 2017 году изобрели совсем простой способ «обмануть» сверточную нейронную сеть: достаточно наклеить на объект стикер со специальным рисунком, и сеть перестанет правильно классифицировать объект (Brown et al., 2017). Впрочем, такой стикер не универсален и будет работать только для определенных сетей, против которых он создавался.
Обзор других многочисленных работ по состязательным атакам можно найти в Akhtar and Mian, 2018 и Akhtar et al., 2021. Проблемы состязательных атак и недостаточного out-of-distribution обобщения в компьютерном зрении, вероятно, связаны между собой. Человеческое зрение тоже подвержено такому типу атак, что доказывают оптические иллюзии.
Проблема неконкретизации в ML-задачах
Рассмотрим еще одну работу, изучающую поведение ML-моделей за пределами обучающего распределения данных.
Для каждой задачи может существовать бесконечное количество разных обученных моделей с разными весами и вычислительными архитектурами, дающих примерно одинаковую точность на обучающей выборке. Это известная и центральная проблема машинного обучения (Mitchell, 1980). Но эта же проблема существует и в другом варианте: для каждой задачи может существовать бесконечное количество разных обученных моделей, дающих примерно одинаковую точность на обучающем распределении данных, из которого взята тестовая выборка.
В работе D’Amour et al., 2020 эту проблему называют проблемой неконкретизации ML-задачи (underspecification of ML-pipeline). Например, если задачей является обучить систему распознавания изображений с помощью сверточной сети, то может существовать огромное множество разных сверточных сетей с разной архитектурой и инициализацией весов, дающих примерно одинаковую точность на тестовой выборке. При смене условий (выходе за пределы обучающего распределения) эти модели могут начать работать сильно по-разному.
В одном из экспериментов авторы обучили на ImageNet 50 сверточных нейронных сетей ResNet-50 (He et al., 2015). На валидационной части ImageNet все сети давали примерно одинаковую точность 75.9% ± 0.1% (указано одно стандартное отклонение). Затем авторы протестировали сети на датасете ImageNet-С (Hendrycks and Dietterich, 2019), содержащем изображения с различными шумами и искажениями (out-of-distrubiton данные с точки зрения ImageNet). В результате на изображениях с пикселизацией сети давали точность 19.7% ± 2.4%, на изображениях с уменьшенной или увеличенной контрастностью сети давали точность 9.1% ± 0.8% и так далее. Аналогичная ситуация наблюдалась на сетях ResNet-101×3 BiT (Kolesnikov et al., 2019).

Видно, что точность моделей не только стала намного хуже, но и увеличился разброс значений точности среди моделей (2.4% против 0.1%). Более того, отклонения от средней точности на разных типах искажений почти не коррелируют. Это означает, что если модель  справляется лучше модели
справляется лучше модели  на изображениях с пикселизацией, то это не означает, что она будет лучше справляться на изображениях с измененной контрастностью.
на изображениях с пикселизацией, то это не означает, что она будет лучше справляться на изображениях с измененной контрастностью.
Подобный эксперимент авторы повторили и с другими данными: на медицинских изображениях, где использовались изображения и 5 камер (первые 4 камеры – обучающее распределение, 5-я камера — out-of-distrubiton данные), и получили аналогичный результат. Таким образом, поведение моделей, имеющих одинаковую точность на тестовой выборке из обучающего распределения, может быть существенно разным за пределами этого распределения.
А ведь в описанных выше экспериментах речь шла о моделях лишь с разной инициализацией весов, что уж говорить о моделях с разной архитектурой? Авторы предполагают, что не только архитектура, но и, скажем, оптимизатор и стратегия управления learning rate может сильно влиять на свойства модели (помимо общей точности на обучающем распределении) и точность работы полученной модели на тех или иных примерах за пределами обучающего распределения.
Выводы
-
ML-модели часто полагаются на «обходные» способы получения ответа (shortcuts), вызванные недостаточным разнообразием обучающего распределения данных и наличия в нем паразитных корреляций (это напоминает утечку данных). Такая модель лишь имитирует решение задачи, и поэтому может перестать корректно работать, если условия изменятся.
-
Следовательно, модели часто показывают низкую точность работы на таких данных, вероятность встретить которые в обучающем датасете была невелика: например, диван леопардовой расцветки, лицо с нанесенной краской, объекты в необычном окружении или текст, в котором используются нестереотипные словосочетания. Например, исходная цель обучения CV-систем обычно такова: мы хотим, чтобы система распознавала интересующие нас объекты в тех случаях, когда это может сделать человек. Но проблема в том, что мы не достигаем этой цели.
-
Модели, показывающие одинаковую среднюю точность при тестировании, могут работать существенно по-разному, что особенно проявляется за пределами распределения данных, на котором модели обучались и тестировались.
-
Системы компьютерного зрения (и не только) подвержены состязательным атакам, при которых внесение различных помех или добавление незначительных деталей может испортить работу модели. Человеческое зрение намного устойчивее к таким атакам.
Здесь еще можно вспомнить платформу Kaggle для проведения ML-соревнований. Часто считают, что рейтинг на Kaggle не полностью отражает уровень ML-специалиста из-за того, что реальный процесс ML-разработки содержит намного больше шагов, чем просто обучения модели. Однако при этом считается, что Kaggle хорошо развивает умение обучать качественные ML-модели. Исходя из рассмотренного выше можно усомниться и в этом факте. На Kaggle качество моделей как правило оценивается на том же распределении, из которого взята обучающая выборка, поэтому проблемы shortcut learning и устойчивость модели к сдвигу данных не играет особой роли. Кроме того, утечки данных (как разновидность сдвига данных) в реальной работе вредны, а на Kaggle скорее полезны.
Способы решения проблем обобщения
Закончив раздел «кто виноват», перейдем к разделу «что делать». Вопрос в том, как изгнать «умного Ганса» из ML-моделей и обучить их в полной мере решать поставленную задачу. Рассмотрим сначала наиболее прямолинейные способы, и закончим исследовательскими гипотезами и обзором работ, посвященных разработкам новых архитектур и методов обучения.
Стресс-тесты для диагностики работы модели
Авторы статей о shortcut learning (Geirhos et al., 2020) и неконкретизации (D’Amour et al., 2020) сходятся в том, что необходимо не только оценивать общую точность модели на тестовой выборке, но и оценивать точность на отдельных типах примеров. В частности, авторы предлагают следующие типы тестов:
-
Stratified evaluations. Разбиение тестовой выборки на типы (например, по значению какого-то признака, по классу) и оценка точности модели отдельно на каждом типе примеров. Процитирую пример из другого обзора:
Пусть модель тестировалась на датасете, в котором 80% изображений были высокого качества (HQ), а применяться будет в условиях, когда, наоборот, 80% изображений будут низкого качества (LQ). Пусть мы сравниваем две модели: на HQ-изображениях точность первой модели лучше, чем второй, а на LQ-изображениях, наоборот, точность второй модели лучше, чем первой. Если при тестировании большая часть изображений были HQ, то мы сделаем вывод, что первая модель лучше, тогда как на самом деле лучше была бы вторая.
-
Shifted evaluations. Тестирование модели на всех типах данных, на которых желательна ее хорошая работа. Например, на зашумленных данных, на фотографиях с разных времен года и так далее.
-
Contrastive evaluations. Вместо расчета средней метрики качества модели по какой-либо выборке, мы изучаем изменение метрики качества при изменении выборки (или одного примера). Например, поворачиваем фотографии на один и тот же угол и сравниваем метрику качества.
В задачах обработки естественного языка Ribeiro et al., 2020 предлагают целый ряд проверок, которые стоит проделать на обученных моделях.
Доменная адаптация
Перечисленные способы помогут вывить проблемы в функционировании модели. После этого соответствующие примеры можно добавить в обучающие данные (или увеличить их процентное соотношение). Обучая модель на недостающих типах данных, мы превращаем out-of-distribution данные в in-distribution данные и повышаем качество работы модели на этих данных. Это наиболее прямолинейное решение проблемы сдвига данных называется доменной адаптацией (см. на paperswithcode.com). Для дообучения можно использовать и неразмеченные данные (см. обзор на Хабре: часть 1, часть 2). Но такой способ не универсален. Мы можем не знать заранее всех свойств данных, с которыми будет работать модель, и не иметь возможности собрать обучающие данные.
Существует так называемая «проблема черного лебедя» (black swan), когда ошибка на очень редком типе примеров может привести к значительным последствиям: например, автоматически управляемый автомобиль попадет в ДТП из-за сбоя в работе его систем компьютерного зрения. Есть много примеров, когда электромобили Tesla неправильно распознавали происходящее вокруг, например, принимали луну за светофор. Насколько бы разнообразным ни был датасет, все равно может оставаться шанс, что мы что-то не учли и не добавили в него какой-то тип примеров.
Если задачей является обучение модели общего назначения для дальнейшего файн-тюнинга, например, предобучение языковой модели, сети для распознавания изображений, сети для распознавания речи или же мультимодальной сети, наподобие CLIP (Radford et al., 2021), то скрытых bias’ов в данных и возможностей для shortcut learning неисчислимое множество, и невозможно устранить их все.
В целом, система с низким out-of-distribution обобщением производит впечатление не слишком «интеллектуальной», а доменная адаптация часто напоминает подстановку «костылей» под модель, не способную хорошо обобщаться. Это напоминает ученика, который научился решать уравнения вида  , но не может решить уравнения
, но не может решить уравнения  , потому что буква стала другой и незнакомой. Дообучив его решать уравнения с
, потому что буква стала другой и незнакомой. Дообучив его решать уравнения с  , мы выясняем, что теперь он не умеет решать уравнения с
, мы выясняем, что теперь он не умеет решать уравнения с  , и так далее, при этом логика его действий сильно зависит от того, какой буквой обозначена неизвестная переменная. Нужно ли искать новые архитектуры и способы обучения, способные лучше обобщаться и более устойчивые к сдвигу данных?
, и так далее, при этом логика его действий сильно зависит от того, какой буквой обозначена неизвестная переменная. Нужно ли искать новые архитектуры и способы обучения, способные лучше обобщаться и более устойчивые к сдвигу данных?
Еще больше данных?
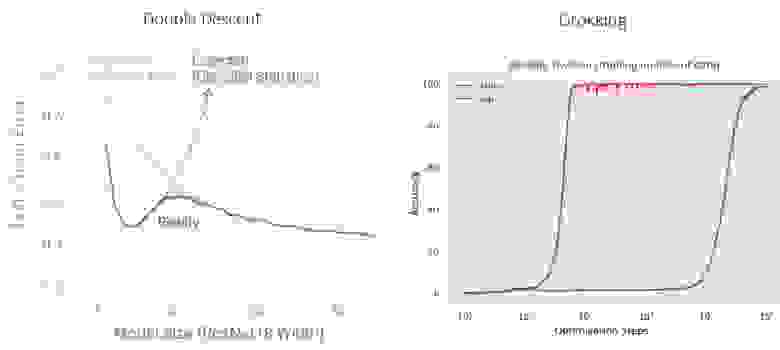
От себя могу предположить, что, как ни странно, еще большее увеличение объема обучающих данных может помочь. С увеличением объема данных почти всегда растет разнообразие данных (умозрительно можно предположить, что если объем растет линейно, то разнообразие растет логарифмически). А ведь разнообразие данных — это именно то, что нужно? Возможно, с какого-то момента, когда loss уже нельзя будет еще сильнее понизить простым запоминанием поверхностной статистики (т. е. с помощью shortcut’ов), процесс оптимизации будет стагнировать и будет вынужден начать искать другие пути понижения loss, в том числе через систематическое обобщение.
Конечно эта лишь гипотеза, и вероятно неверная. Но на мой взгляд важно иметь в виду, что зависимость качества обучения от размера модели и объема данных может быть необычной и непредсказуемой. Например, в Nakkiran et al., 2019 (double descent) была показана необычная зависимость точности на валидации от размера модели, а в Power et al., 2022 (grokking) от длительности обучения.
Более крупные или более эффективные модели?
Сейчас глубокое обучение в основном идет по пути экстенсивного развития, при котором улучшения достигаются увеличением объема обучающих данных и размера моделей («stack more layers»). Разработке принципиально иных архитектур и способов обучения уделяется мало внимания и финансирования, что и понятно: в таких исследованиях нет никакой гарантии успеха и получения работающего решения в обозримые сроки. Но как мы увидели выше, простое увеличение объема данных не всегда дает решение, обладающее желаемым уровнем обобщения. Об этом говорят авторы работы, посвященной графовым сетям (Battaglia et al., 2018):
The question of how to build artificial systems which exhibit combinatorial generalization has been at the heart of AI since its origins, and was central to many structured approaches, including logic, grammars, classic planning, graphical models, causal reasoning, Bayesian nonparametrics, and probabilistic programming (Chomsky, 1957; Nilsson and Fikes, 1970; Pearl, 1986, 2009; Russell and Norvig, 2009; Hjort et al., 2010; Goodman et al., 2012; Ghahramani, 2015). … A key reason why structured approaches were so vital to machine learning in previous eras was, in part, because data and computing resources were expensive, and the improved sample complexity afforded by structured approaches’ strong inductive biases was very valuable.
In contrast with past approaches in AI, modern deep learning methods (LeCun et al., 2015; Schmidhuber, 2015; Goodfellow et al., 2016) often follow an «end-to-end» design philosophy which emphasizes minimal a priori representational and computational assumptions, and seeks to avoid explicit structure and «hand-engineering». This emphasis has fit well with — and has perhaps been affirmed by — the current abundance of cheap data and cheap computing resources, which make trading off sample efficiency for more flexible learning a rational choice. …
Despite deep learning’s successes, however, important critiques (Marcus, 2001; Shalev-Shwartz et al., 2017; Lake et al., 2017; Lake and Baroni, 2018; Marcus, 2018a, 2018b; Pearl, 2018; Yuille and Liu, 2018) have highlighted key challenges it faces in complex language and scene understanding, reasoning about structured data, transferring learning beyond the training conditions, and learning from small amounts of experience. These challenges demand combinatorial generalization, and so it is perhaps not surprising that an approach which eschews compositionality and explicit structure struggles to meet them.
Авторы работы, посвященной системам компьютерного зрения (Yuille and Liu, 2018), также делают вывод о том, что больших данных может быть недостаточно, и нужно искать новые подходы к обучению и оценке качества моделей.
We argue that Deep Nets in their current form are unlikely to be able to overcome the fundamental problem of computer vision, namely how to deal with the combinatorial explosion, caused by the enormous complexity of natural images, and obtain the rich understanding of visual scenes that the human visual achieves. We argue that this combinatorial explosion takes us into a regime where «big data is not enough» and where we need to rethink our methods for benchmarking performance and evaluating vision algorithms. … We question whether Deep Nets will be sufficient to address these challenges and argue that methods that are compositional, generative, and combine signal and symbolic processing will be needed.
Рост результатов на различных бенчмарках, например SuperGLUE, тоже в основном обусловлен ростом размера моделей и количества обучающих данных. Но обучающие данные все же не бесконечны. Современные языковые модели и так обучаются почти на всех данных, какие удалось собрать со всего интернета.
В какой-то момент, скорее всего, потребуется прекратить рост размера моделей, объема датасетов и сосредоточиться на разработке совершенно иных подходов, стандартизировав наборы обучающих данных (как предлагает Linzen, 2020) для лучшего сравнения эффективности подходов.

Модификации способов обучения языковых моделей
Современные языковые модели предобучаются, например, на следующих задачах:
-
Предсказание токенов (т. е. слов или их частей), закрытых маской (masked language modeling, BERT, Devlin et al., 2018). Иногда используют модификацию этой задачи, в которой закрываются маской словосочетания, представляющие собой целостные сущности (knowledge masking, ERNIE, Sun et al., 2019).
-
Предсказания следующего токена в тексте (generative pre-training, GPT, Radford et al., 2018). При этом на архитектуру модели накладывается ограничение:
 -й входной токен не должен влиять на выходные токены с индексами меньше
-й входной токен не должен влиять на выходные токены с индексами меньше  .
. -
Предсказание отдельных токенов в тексте, полученном конкатенацией предложения из энциклопедии и информации из графа знаний (universal knowledge-text prediction, ERNIE 3.0, Sun et al., 2021). Кроме этой задачи, модель ERNIE 3.0 также обучается на задачах generative pre-training и knowledge masked language modeling.
-
Наборы sequence-to-sequence задач, генерируемых в self-supervised режиме, в том числе аналоги задачи masked language modeling (T5, Raffel et al., 2019, см. figure 2, table 3).
Чтобы лучше понять свойства этих задач, можно попробовать порешать их самостоятельно. Я сделал Colab-ноутбук для генерации случайных обучающих примеров в задаче masked language modeling (MLM). Из примеров можно видеть следующее:
-
Существенная часть замаскированных токенов определяется тривиально
-
Во многих случаях предсказать замаскированные токены исходя из контекста невозможно, а значит для решения задачи на большом корпусе текста нужно запоминать множество различных фактов: сюжеты литературных произведений, историю, политику и так далее, а также множество статистики совместной встречаемости слов в тексте (shortcuts). Даже выучив множество фактов и статистики, решить задачу MLM можно далеко не всегда.
-
Лишь изредка возможно предсказать замаскированный токен на основании контекста и логики, и чаще всего эта логика достаточно простая. Исчезающе редки примеры, где для предсказания нужна нетривиальная логика, которую нельзя имитировать запоминанием фактов и статистики.
Следовательно, приоритетом для снижения loss на задаче MLM является запоминание фактов и статистики. Способность рассуждать и делать выводы (отображая слова в некую модель мира и обратно, как это делает человек) для снижения loss является лишь второстепенным фактором, при этом выучить эту способность должно быть намного сложнее, чем запомнить факты.
Получается, что мы обучаем сеть на такой задаче, которую нельзя хорошо решить, обладая одной лишь логикой и пониманием смысла общеупотребимых слов, но можно неплохо решить с помощью запоминания огромного объема фактов и shortcut’ов. Обученная таким способом модель действительно может оказаться способной генерировать правдоподобные тексты, но лишь «вспоминая», что когда-то видела что-то похожее. Таким образом, модель долго и старательно обучается, но вовсе не тому, чего мы от нее хотим.
Отсюда можно сделать вывод о том, что обучение сетей, которые действительно понимают смысл текста в том смысле, в каком его понимает человек (вместо использования shortcut’ов для имитации понимания текста) будет затруднительным, если принципиально не менять задачу предобучения или архитектуру модели.
Архитектура моделей и структура данных
Модель эффективно обобщается, если ее структура соответствует структуре моделируемых данных. По этой причине на выборке, сгенерированной случайно инициализированной нейронной сетью, хорошо обобщается другая нейронная сеть (Gorishniy et al., 2021), на выборке, сгенерированной случайным решающим деревом, хорошо обобщаются другие деревья, сверточные сети хорошо обобщаются на текстурах и составленных из них изображениях (Ulyanov et al., 2017), а AlphaFold 2 за счет структурного модуля хорошо обобщается на трехмерных структурах белков (Jumper et al., 2021). Какова же структура текстов и изображений? Можно назвать два основных уровня:
Уровень 1. Низкоуровневая локальная структура. В изображениях это набор локальных признаков (текстуры и границы), в текстах это буквы и морфология слов. Также сюда можно отнести уровень звукового/визуального восприятия текста и интонацию.
Уровень 2. Высокоуровневая иерархическая разреженная структура. В текстах эта структура начинается с синтаксиса, следующим уровнем является связь между предложениями, абзацами и более крупными частями текста. В изображениях обычно тоже есть некая иерархическая структура, соответствующая объектам и их частям в трехмерном пространстве на разном расстоянии. При этом между элементами иерархической структуры имеется разреженный граф смысловых и причинно-следственных взаимосвязей. Например, рассуждая о человеке на фотографии, мы никак не будем учитывать цвет стоящего неподалеку автомобиля. Разреженность помогает не обращать внимание на паразитные корреляции и избегать shortcut learning’а.
Кроме того, когда человек воспринимает фотографию, иерархическая структура изображения отображается в модель мира, и человек сознательно или подсознательно выводы о том, логично ли изображенное на фотографии, в каком контексте и зачем оно сделано и каково развитие событий в момент съемки. С текстом все в целом аналогично.
Судя по всему, для исправления проблемы shortcut learning модель должна реализовывать именно такой способ обработки изображения или текста, то есть уметь представлять входные данные (изображение или текст) как иерархическую комбинацию составляющих частей с разреженными взаимосвязями, что соответствует уровню 2, и быть способной корректно интерпретировать те же части в необычных комбинациях. По сравнению с абстрактным свойством out-of-distribution обобщения, это более конкретное желаемое свойство называют систематическим, композиционным, или комбинаторным обобщением (Bahdanau et al., 2018; Furrer et al., 2020). Достижение такого уровня обобщения остается открытой проблемой машинного обучения.
If you think about child learning, for example, their world is changing over time, their body is changing over time, and so we need systems that are going to be able to handle those changes and do things like continual learning, life-long learning and so on. This has been a long-standing goal for machine learning, but I think we haven’t yet built the solutions to this. And one of the crucial elements in order to be successful in this … is introducing more forms of compositionality. It means being able to learn from some finite sets of combinations about a much larger set of combinations. (Yoshua Bengio, NeurIPS 2019)
Здесь часто вспоминают символьные подходы, с которых и начинались исследования ИИ в XX веке. По структуре такие системы, кажется, обладают всем необходимым: они могут работать с объектами и их частями, то есть с интерпретируемыми промежуточными данными, работать иерархически, реализовывать сложные цепочки рассужедний, а вычисления внутри них могут затрагивать лишь немногие объекты и взаимосвязи, что означает разреженность. Непонятно лишь одно: как их обучать, чтобы они могли быть сложными и достаточно гибкими одновременно.
Например, пусть некая подсистема решает, какую из операций из набора  применить к данным
применить к данным  . Для этого она выдает вероятности
. Для этого она выдает вероятности  и выбирает операцию с наибольшей вероятностью. Допустим, на текущем примере мы выбрали операцию
и выбирает операцию с наибольшей вероятностью. Допустим, на текущем примере мы выбрали операцию  , и в итоге получили значение функции потерь
, и в итоге получили значение функции потерь  . Производные
. Производные  равны нулю, поэтому такую систему не получится обучить обычным градиентным спуском. Можно попробовать рассчитать ответ, используя по очереди все
равны нулю, поэтому такую систему не получится обучить обычным градиентным спуском. Можно попробовать рассчитать ответ, используя по очереди все  , и снизить вероятности
, и снизить вероятности  для тех
для тех  , на которых loss получился выше, чем на других. Но если граф принятия решений содержит не одну, а много операций принятия решения (
, на которых loss получился выше, чем на других. Но если граф принятия решений содержит не одну, а много операций принятия решения ( ), тогда придется перебирать очень много разных вариантов последовательностей решений. Аналогичная проблема возникает, если мы выбираем не операцию, а один или несколько элементов среди доступных данных (hard attention).
), тогда придется перебирать очень много разных вариантов последовательностей решений. Аналогичная проблема возникает, если мы выбираем не операцию, а один или несколько элементов среди доступных данных (hard attention).
Направления исследований
В машинном обучении каждый день публикуется множество научных статей. Что-то модно, что-то вышло из моды, какие-то работы еще ждут признания, а какие-то так и остались незамеченными. Приведенный ниже список статей не претендует на полноту и описывает лишь некоторые из современных направлений исследований.
В перечисленных ниже работах изучаются проблемы современных систем компьютерного зрения. В некоторых из них также предлагаются различные модификации процесса обучения и способа оценки качества моделей, в том числе с помощью meta-learning.
-
Szegedy et al., 2013. Intriguing properties of neural networks.
-
Peng et al., 2017. Zero-Shot Deep Domain Adaptation.
-
Yuille and Liu, 2018 Deep Nets: What have they ever done for Vision?
-
Li et al., 2017. Learning to Generalize: Meta-Learning for Domain Generalization.
-
Beery et al., 2018. Recognition in Terra Incognita.
-
Baker et al., 2018. Deep convolutional networks do not classify based on global object shape.
-
Balaji et al., 2018. MetaReg: Towards Domain Generalization using Meta-Regularization.
-
Hendrycks et al., 2019. Natural Adversarial Examples.
-
Brendel and Bethge, 2019. Approximating CNNs with Bag-of-local-Features models works surprisingly well on ImageNet.
-
Lapuschkin et al., 2019. Unmasking Clever Hans Predictors and Assessing What Machines Really Learn.
-
Wang et al., 2019. High Frequency Component Helps Explain the Generalization of CNN.
-
Ilyas et al., 2019. Adversarial Examples Are Not Bugs, They Are Features.
-
Bucher et al., 2019. Zero-Shot Semantic Segmentation.
-
Taori et al., 2020. Measuring Robustness to Natural Distribution Shifts in Image Classification.
-
Djolonga et al., 2020. On Robustness and Transferability of Convolutional Neural Networks.
-
Mahajan et al., 2020. Domain Generalization using Causal Matching.
-
Zhou et al., 2020. Deep Domain-Adversarial Image Generation for Domain Generalisation.
-
Fabbrizzi et al., 2021. A Survey on Bias in Visual Datasets.
-
Shu et al., 2021. Open Domain Generalization with Domain-Augmented Meta-Learning.
-
Zhou et al., 2021. MixStyle Neural Networks for Domain Generalization and Adaptation.
Проблемы современных языковых моделей, проблемы данных, на которых они обучаются, и некоторые способы улучшения данных и способов обучения описаны в следующих работах:
-
Gururangan et al., 2018. Annotation Artifacts in Natural Language Inference Data.
-
Kaushik and Lipton, 2018. How Much Reading Does Reading Comprehension Require? A Critical Investigation of Popular Benchmarks.
-
Jawahar et al., 2019. What does BERT learn about the structure of language?
-
Goldberg, 2019. Assessing BERT’s Syntactic Abilities.
-
McCoy et al., 2019. Right for the Wrong Reasons: Diagnosing Syntactic Heuristics in NLI.
-
Zellers et al., 2019. HellaSwag: Can a Machine Really Finish Your Sentence?
-
Lin et al., 2019. Open Sesame: Getting Inside BERT’s Linguistic Knowledge.
-
Kovaleva et al., 2019. Revealing the Dark Secrets of BERT.
-
Kavumba et al., 2019. When Choosing Plausible Alternatives, Clever Hans can be Clever.
-
McCoy et al., 2019. BERTs of a feather do not generalize together: Large variability in generalization across models with similar test set performance.
-
Keysers et al., 2019. Measuring Compositional Generalization: A Comprehensive Method on Realistic Data.
-
Rogers, 2020. A Primer in BERTology: What we know about how BERT works.
-
Goodwin et al., 2020. Probing Linguistic Systematicity.
-
Ribeiro et al., 2020. Beyond Accuracy: Behavioral Testing of NLP models with CheckList.
-
Linzen, 2020. How Can We Accelerate Progress Towards Human-like Linguistic Generalization?
-
Bender and Koller, 2020. Climbing towards NLU: On Meaning, Form, and Understanding in the Age of Data.
-
Yu and Ettinger, 2020. Assessing Phrasal Representation and Composition in Transformers.
-
Liu et al., 2021. GPT Understands, Too.
-
Du et al., 2021. Towards Interpreting and Mitigating Shortcut Learning Behavior of NLU Models.
-
Shin et al., 2021. Constrained Language Models Yield Few-Shot Semantic Parsers.
-
Yanaka et al., 2021. SyGNS: A Systematic Generalization Testbed Based on Natural Language Semantics.
-
Sanh et al., 2021. Multitask Prompted Training Enables Zero-Shot Task Generalization.
-
Shavrina and Malykh, 2021. How not to Lie with a Benchmark: Rearranging NLP Leaderboards.
-
Veres, 2021. Language Models are not Models of Language.
-
Wei et al., 2021. Finetuned Language Models Are Zero-Shot Learners.
-
Ouyang et al., 2022. Training language models to follow instructions with human feedback.
В том числе, с помощью языковых моделей успешно решаются задачи генерации программного кода и решения математических задач, что само по себе интересно и может помочь лучше понять свойства такого типа моделей:
-
Cobbe et al., 2021. Training Verifiers to Solve Math Word Problems.
-
Polu et al., 2022. Formal Mathematics Statement Curriculum Learning.
Исследователи давно ищут возможность обучить модели систематическому обобщению, пониманию понятий части и целого и оперированию абстрактными концепциями. Некоторые из последних работ по этой теме:
-
Lake et al., 2015. Human-level concept learning through probabilistic program induction.
-
Bengio, 2017. The Consciousness Prior.
-
Sabour et al., 2017 Dynamic Routing Between Capsules.
-
Evans and Grefenstette, 2017. Learning Explanatory Rules from Noisy Data.
-
Bahdanau et al., 2018. Systematic Generalization: What Is Required and Can It Be Learned?
-
Battaglia et al., 2018. Relational inductive biases, deep learning, and graph networks.
-
Vlastelica et al., 2021. Neuro-algorithmic Policies enable Fast Combinatorial Generalization.
-
Hinton, 2021. How to represent part-whole hierarchies in a neural network.
Высокая способность к обобщению также требуется при обучении агентов, так как окружение может быть очень разнообразным и меняться от действий самих агентов, а значит важным является способность агентов корректно функционировать в новых условиях, не встречавшихся раньше.
-
Gupta et al., 2021. Embodied Intelligence via Learning and Evolution.
-
Hazra et al., 2021. Zero-Shot Generalization using Intrinsically Motivated Compositional Emergent Protocols.
-
Jang et al., 2021. BC-Z: Zero-Shot Task Generalization with Robotic Imitation Learning.
Мнение многих исследователей сходится в том, что для создания ML-систем следующего поколения, способных исправить важные недостатки текущих систем, нужно пробовать объединять нейронные сети и символьные вычисления:
-
Besold et al., 2017. Neural-Symbolic Learning and Reasoning: A Survey and Interpretation.
-
Mao et al., 2019. The Neuro-Symbolic Concept Learner: Interpreting Scenes, Words, and Sentences From Natural Supervision.
-
Vankov and Bowers, 2019. Training neural networks to encode symbols enables combinatorial generalization.
-
Latapie et al., 2021. Neurosymbolic Systems of Perception & Cognition: The Role of Attention.
-
Niepert et al., 2021. Implicit MLE: Backpropagating Through Discrete Exponential Family Distributions.
Одним из многообещающих подходов к повышению обобщающей способности моделей считается meta-learning («learning-to-learn»):
-
Hospedales et al., 2020. Meta-Learning in Neural Networks: A Survey.
Много работ посвящено попыткам улучшения трансформера (Vaswani et al., 2017), а также попыткам перенести его обобщающие свойства (inductive biases) на другие архитектуры или найти более простые альтернативы. Трансформер можно рассматривать как графовую нейронную сеть, в которой вершины хранят информацию, а ребра не хранят информации. Однако недавно были опубликованы работы, в которых предлагаются модификации трансформера с хранением информации в ребрах (подобный подход уже использовался, например, в AlphaFold 2). Также была обнаружена интересная взаимосвязь трансформера с сетями Хопфилда.
-
Kerg et al., 2019. Untangling tradeoffs between recurrence and self-attention in neural networks.
-
Gao et al., 2020. Systematic Generalization on gSCAN with Language Conditioned Embedding.
-
Ramsauer et al., 2020. Hopfield Networks is All You Need.
-
Tay et al., 2020. Efficient Transformers: A Survey.
-
Dosovitskiy et al., 2020. An Image is Worth 16×16 Words: Transformers for Image Recognition at Scale.
-
Bello, 2021. LambdaNetworks: Modeling Long-Range Interactions Without Attention.
-
Lu et al., 2021. Pretrained Transformers as Universal Computation Engines.
-
Jaegle et al., 2021. Perceiver: General Perception with Iterative Attention.
-
Pan et al., 2021. On the Integration of Self-Attention and Convolution.
-
Liu et al., 2021. Pay Attention to MLPs.
-
Lee-Thorp et al., 2021. FNet: Mixing Tokens with Fourier Transforms.
-
Peng et al., 2021. Random Feature Attention.
-
Nguyen et al., 2021. FMMformer: Efficient and Flexible Transformer via Decomposed Near-field and Far-field Attention.
-
Xu et al., 2021. CDTrans: Cross-domain Transformer for Unsupervised Domain Adaptation.
-
Nawrot et al., 2021. Hierarchical Transformers Are More Efficient Language Models.
-
Bergen et al., 2021. Systematic Generalization with Edge Transformers.
-
Hussain et al., 2021. Edge-augmented Graph Transformers: Global Self-attention is Enough for Graphs.
-
Wang et al., 2022. When Shift Operation Meets Vision Transformer: An Extremely Simple Alternative to Attention Mechanism.
Если модель встречается с необычным примером и не может выдать на нем корректный ответ, то можно по крайней мере научить модель сомневаться, то есть оценивать уверенность в предсказании. Это может помочь не только в случае сдвига данных, но и на тех примерах, на которых точечная оценка условного распределения  даст высокую ожидаемую ошибку (то есть ответ нельзя с уверенностью предсказать из исходных данных). В этом контексте часто упоминают байесовские методы, ансамблирование и генеративные модели. Некоторые из работ по теме байесовских методов и оценки уверенности в предсказаниях:
даст высокую ожидаемую ошибку (то есть ответ нельзя с уверенностью предсказать из исходных данных). В этом контексте часто упоминают байесовские методы, ансамблирование и генеративные модели. Некоторые из работ по теме байесовских методов и оценки уверенности в предсказаниях:
-
Wang and Vasconcelos, 2018. Towards Realistic Predictors.
-
Maddox et al., 2019. A Simple Baseline for Bayesian Uncertainty in Deep Learning.
-
Nalisnick et al., 2019. Detecting Out-of-Distribution Inputs to Deep Generative Models Using Typicality.
-
Ren et al., 2019. Likelihood Ratios for Out-of-Distribution Detection.
-
Jospin et al., 2020. Hands-on Bayesian Neural Networks — a Tutorial for Deep Learning Users.
-
Lakshminarayanan, 2020. Uncertainty & Out-of-Distribution Robustness in Deep Learning.
-
Yang et al., 2021. Generalized Out-of-Distribution Detection: A Survey.
-
Henning et al., 2021. Are Bayesian neural networks intrinsically good at out-of-distribution detection?
-
Huyen, 2022. Data Distribution Shifts and Monitoring.
Еще несколько общих статей о проблемах современного машинного обучения, паразитных корреляциях в данных и подходах к повышению обобщающей способности (некоторые из них подробно разбирались в этом обзоре):
-
Tommasi et al., 2015. A Deeper Look at Dataset Bias.
-
Ross et al., 2017. Right for the Right Reasons: Training Differentiable Models by Constraining their Explanations.
-
Shalev-Shwartz et al., 2017. Failures of Gradient-Based Deep Learning.
-
Marcus, 2018. Deep Learning: A Critical Appraisal.
-
Mehrabi et al., 2019. A Survey on Bias and Fairness in Machine Learning.
-
Geirhos et al., 2020. Shortcut Learning in Deep Neural Networks.
-
D’Amour et al., 2020. Underspecification Presents Challenges for Credibility in Modern Machine Learning.
-
Xu et al., 2020. How Neural Networks Extrapolate: From Feedforward to Graph Neural Networks.
-
Pezeshki et al., 2021. Gradient Starvation: A Learning Proclivity in Neural Networks.
-
Balestriero et al., 2021. Learning in High Dimension Always Amounts to Extrapolation.
-
Shen et al., 2021. Towards Out-Of-Distribution Generalization: A Survey.
Многие исследователи считают, что важно не только обучить модели выявлять статистические зависимости, но и находить в данных причинно-следственные связи. Имея лишь выборку из распределения данных, это не всегда можно сделать. Например, пусть мы имеем набор фотографий с неизвестной планеты, и на некоторых фотографиях есть огонь и есть неопознанные существа, при этом появление существ и огня на фотографиях сильно коррелирует. Что является причиной, а что следствием? Разводят ли существа огонь сами, приходят ли к уже появившемуся огню, или же оба явления имеют общую причину (прилетает звездолет, высаживает существ и оставляет на земле огонь после взлета)? Это практически невозможно определить из фотографий (или же очень сложно, по косвенным признакам). Поиска причинно-следственных связей является более сложной задачей, чем поиск статистических зависимостей. Следующие книги и статьи посвящены именно этой теме:
-
Pearl, 2009. Causality: Models, Reasoning and Inference, 2nd edition.
-
Guo et al., 2018. A Survey of Learning Causality with Data: Problems and Methods
-
Pearl, 2018. Theoretical Impediments to Machine Learning With Seven Sparks from the Causal Revolution.
-
Pearl, 2018. The Seven Tools of Causal Inference with Reflections on Machine Learning.
-
Schölkopf, 2019. Causality for Machine Learning.
-
Arjovsky et al., 2019. Invariant Risk Minimization.
-
Träuble et al., 2020. On Disentangled Representations Learned From Correlated Data
Отдельно можно отметить работу группы Йошуа Бенжио в институте MILA (Канада):
-
Bengio et al., 2019. A Meta-Transfer Objective for Learning to Disentangle Causal Mechanisms.
-
Goyal et al., 2019. Recurrent Independent Mechanisms.
-
Ke et al., 2019. Learning Neural Causal Models from Unknown Interventions.
-
Ahmed et al., 2020. Systematic generalisation with group invariant predictions.
-
Goyal and Bengio, 2020. Inductive Biases for Deep Learning of Higher-Level Cognition.
-
Krueger et al., 2020. Out-of-Distribution Generalization via Risk Extrapolation (REx).
-
Goyal et al., 2021. Neural Production Systems.
-
Schölkopf et al., 2021. Towards Causal Representation Learning.
-
Xia et al., 2021. The Causal-Neural Connection: Expressiveness, Learnability, and Inference.
-
Zhao et al., 2021. A Consciousness-Inspired Planning Agent for Model-Based Reinforcement Learning.
-
Ahuja et al., 2021. Invariance Principle Meets Information Bottleneck for OOD Generalization.
-
Liu et al., 2021. Discrete-Valued Neural Communication.
-
Rahaman et al., 2021. Dynamic Inference with Neural Interpreters.
Различные модальности (изображения, текст и др.) могут дополнять друг друга и формировать более целостную картину мира, чем каждая модальность по отдельности, поэтому мультимодальное обучение кажется многообещающим. В последние пару лет в этой области были достигнуты впечатляющие результаты.
-
Su et al., 2019. VL-BERT: Pre-training of Generic Visual-Linguistic Representations.
-
Ramesh et al., 2021. Zero-Shot Text-to-Image Generation.
-
Radford et al., 2021. Learning Transferable Visual Models From Natural Language Supervision.
-
Goh et al., 2021. Multimodal Neurons in Artificial Neural Networks.
-
Singh et al., 2021. Illiterate DALL-E Learns to Compose.
-
Lin et al., 2021. M6: A Chinese Multimodal Pretrainer.
-
Wang et al., 2022. Unifying Architectures, Tasks, and Modalities Through a Simple Sequence-to-Sequence Learning Framework.
Одним из возможных путей к созданию ML-систем следующего поколения может стать обучение систем, способных анализировать видео и предсказывать следующие события (далее чем несколько кадров), в том числе в текстовом виде. Такие системы могут быть способы отличать статистические зависимости от причинно-следственных связей, а также соотносить текст с происходящими событиями. Похожая задача возникает при обучении агентов, которым необходимо предсказывать последствия своих и чужих действий. Агента может заменить на наблюдателя, задача которого — лишь предсказывать последствия чужих действий. Можно искать и другие способы создания самообучающейся модели мира, какая существует, например, в сознании человека.
-
Ha and Schmidhuber, 2018. World Models.
-
Lotter et al., 2018. A neural network trained to predict future video frames mimics critical properties of biological neuronal responses and perception.
-
Zhang and Tao, 2019. Slow Feature Analysis for Human Action Recognition.
-
Xu et al., 2020. Video Prediction via Example Guidance.
-
Apostolidis et al., 2021. Video Summarization Using Deep Neural Networks: A Survey.
-
Lee et al., 2021. Revisiting Hierarchical Approach for Persistent Long-Term Video Prediction.
-
Wu et al., 2021. Generative Video Transformer: Can Objects be the Words?
Общий искусственный интеллект
Исследователей всегда интересовала тема общего искусственного интеллекта и создания систем, которые мыслят как люди. Проблема здесь начинается с того, что разные люди по-разному определяют, что же конкретно это означает. Как мне кажется, здесь может помочь введение более узких терминов с более конкретными определениями, вместо расплывчатых и спорных понятий «общего ИИ» и «сильного ИИ». Если разные люди хотят предложить разные определения, то пусть придумают для них разные термины.
Например, можно предложить такое определение: полнофункциональный искусственный интеллект — это система, способная решать все задачи, которые может решать человек. Если больше не останется таких типов задач, которые может решить практически любой человек, но не может решить ИИ (качество решения оценивается голосованием людей), то тогда можно будет считать, что создан полнофункциональный ИИ, согласно его определению. Конечно, не обязательно требовать от ИИ выполнения механических движений или, скажем, мимики лица. Поэтому можно предложить более узкое понятие: полнофункциональный текстовый искусственный интеллект — это система, способная решать все задачи, которые может решать человек в текстовом виде, будь он по ту сторону монитора и имея достаточно времени. Конечно, и такое определение может породить споры, но все же оно несколько более конкретно.
Я никоим образом не являюсь специалистом по вопросу общего ИИ, но как автор обзора выскажу мнение по поводу его достижения. Меня привлекает идея постепенного улучшения, когда на каждом шаге ищутся недостатки систем текущего поколения и находятся способы их преодоления для создания систем следующего поколения. Можно провести аналогию с градиентным спуском или методом отжига: мы постепенно улучшаем решение, не пытаясь все выбросить и начать с нуля, и периодически пробуем внедрить какие-то принципиальные изменения. Тогда на текущем этапе развития машинного обучения нужно сосредоточиться на решении проблем обобщения, которым и был посвящен этот обзор.
Приведу также несколько работ, в которых рассматривается вопрос общего искусственного интеллекта и сопоставления биологического интеллекта с текущими ML-системами.
-
Marcus, 2001. The Algebraic Mind: Integrating Connectionism and Cognitive Science.
-
Marcus, 2004. The Birth of the Mind: How a Tiny Number of Genes Creates The Complexities of Human Thought.
-
Griffiths et al., 2010. Probabilistic models of cognition: exploring representations and inductive biases.
-
Goertzel, 2014. Artificial General Intelligence: Concept, State of the Art, and Future Prospects.
-
Lake et al., 2016. Building machines that learn and think like people.
-
Hassabis, 2017. Neuroscience-Inspired Artificial Intelligence.
-
Goertzel, 2018. From Here to Human-Level AGI in 4 Simple Steps.
-
Chollet, 2019. On the Measure of Intelligence.
-
Wang, 2019. On Defining Artificial Intelligence.
-
Wang et al., 2020. On Defining Artificial Intelligence – Commentaries and Author’s Response.
-
Marcus, 2020. The Next Decade in AI: Four Steps Towards Robust Artificial Intelligence.
-
Fjelland, 2020. Why general artificial intelligence will not be realized.
-
Chollet, 2020. A Definition of Intelligence for the Real World?
-
Stoop, 2021. Note on the Reliability of Biological vs. Artificial Neural Networks.
-
Goertzel, 2021. The General Theory of General Intelligence: A Pragmatic Patternist Perspective.
Интересны работы с участием нейробиолога Карла Фристона, который исследует принципы работы человеческого мозга и их возможную связь с вариационными байесовскими методами в математической статистике:
-
Friston, 2010. The free-energy principle: a unified brain theory?
-
Isomura et al., 2022. Canonical neural networks perform active inference.
-
Friston et al., 2022. The free energy principle made simpler but not too simple.
-
Parr et al., 2022. Active Inference: The Free Energy Principle in Mind, Brain, and Behavior.
Заключение
Как мне кажется, проблемы содержатся не только в алгоритмах, но и в человеческом сознании. Людям неинтересно изучать и исследовать. Чтение статей, изучение информации воспринимается лишь как скучная необходимость, сложные вопросы и исследовательские задачи не занимают людей, а интересует в основном лишь заработок.
Еще одна сложность в том что количество научных статей и книг в области исследовательского ML стремительно растет. На конференции NeurIPS 2021 было опубликовано более 2300 статей (больше, чем за 2010-2015 годы вместе взятые): одни только аннотации заняли бы целый том. Возникает острая потребность в систематизации информации. Читать статьи в оригинале долго и тяжело по нескольким причинам.
-
Каждая статья содержит обзор других работ, и если вы читаете, скажем, 20 статей по одной и той же области, то эти обзоры во многом дублируют друг друга и отбивают интерес к чтению.
-
Материал статьи может быть изложен не лучшим образом, непонятно или с повторениями. Сейчас не принято, как раньше, публиковать короткие статьи, хотя содержание многих статей можно было бы изложить на одной странице.
-
Раздел про гиперпараметры, датасеты и детали эксперимента может быть важен тем, кто будет имплементировать это на практике через месяц после выхода статьи, но через 5 лет станет не особенно интересен, хотя предложенный в статье метод может сохранить свою актуальность. Если же совсем не читать экспериментальный раздел, то можно упустить что-то важное.
-
При чтении статьи восприятие происходит однобоко. Непонятно, был ли предложенный в статье метод признан эффективным на практике, получил ли широкое распространение, или же вскоре был предложен более эффективный подход? Актуален ли метод по сей день, или если нет то почему? Часто не хватает взгляда со стороны от компетентного специалиста, желательно от нескольких.
Исходя из всего этого, систематизация и изложение статей в сокращенном варианте, как мне кажется, могло бы принести огромную пользу для сообщества. Конечно, многими прилагаются усилия в этом направлении, но этого пока недостаточно. Краткие изложения статей остаются бесплатной работой для энтузиастов, тогда как пользу они приносят вполне реальную.
На мой взгляд, будь эта практика более широко распространена, и будь у людей больше интереса к исследованиям, мы могли бы уже создавать такие системы искусственного интеллекта, которую бы приносили огромную пользу человечеству (в медицине, физике, интернет-технологиях, оптимизации работы людей и, стало быть, сокращении рабочей недели) и которые пока что остаются лишь в области фантастики.
Данный обзор первоначально размещен на сайте generalized.ru, где вы можете найти и другие обзоры.
Каковы типы ошибок обучающих данных ИИ?

Ошибки маркировки, ненадежные данные, несбалансированные данные, предвзятость данных
Мы рассмотрим четыре наиболее распространенные ошибки обучающих данных и способы их избежать.
Ошибки маркировки
Ошибки в маркировке являются одними из самых распространенные ошибки найти в обучающих данных. Если модель данные испытаний имеет неправильную маркировку наборов данных, результирующее решение будет бесполезным. Исследователи данных не будут делать точных или осмысленных выводов о производительности или качестве модели.
Ошибки маркировки бывают разных форм. Мы используем простой пример, чтобы продвинуть точку. Если аннотаторы данных имеют простую задачу рисования ограничивающих рамок вокруг каждой кошки на изображениях, могут возникнуть следующие типы ошибок маркировки.
- Неточная подгонка: переоснащение модели происходит, когда ограничивающие рамки не нарисованы как можно ближе к объекту (кошке), оставляя несколько пробелов вокруг предполагаемой вещи.
- Отсутствующие ярлыки: В этом случае аннотатор может не отметить кошку на изображениях.
- Неверная интерпретация инструкции: Инструкции, предоставленные аннотаторам, не ясны. Вместо того, чтобы помещать одну ограничивающую рамку вокруг каждой кошки на изображениях, аннотаторы размещают одну ограничивающую рамку, охватывающую всех кошек.
- Обработка окклюзии: Вместо того, чтобы размещать ограничивающую рамку вокруг видимой части кота, аннотатор размещает ограничивающие рамки вокруг ожидаемой формы частично видимой кошки.
Неструктурированные и ненадежные данные
Объем проекта машинного обучения зависит от типа набора данных, на котором он обучается. Компании должны использовать свои ресурсы для получения наборов данных, которые являются обновленными, надежными и репрезентативными для необходимого результата.
Когда вы обучаете модель на данных, которые не обновляются, это может привести к долгосрочным ограничениям в приложении. Если вы обучаете свои модели на нестабильных и непригодных для использования данных, это будет отражать полезность модели ИИ.
Несбалансированные данные
Любой дисбаланс данных может привести к отклонениям в производительности вашей модели. При построении высокопроизводительных или сложных моделей следует тщательно продумать состав обучающих данных. Дисбаланс данных может быть двух видов:
- Дисбаланс классов: Дисбаланс классов возникает, когда данные обучения имеет крайне несбалансированное распределение классов. Другими словами, нет репрезентативного набора данных. Когда в наборах данных есть дисбаланс классов, это может вызвать много проблем при создании реальных приложений.
Например, если алгоритм обучается распознавать кошек, в обучающих данных будут только изображения кошек на стенах. Тогда модель будет хорошо работать при идентификации кошек на стенах, но плохо в других условиях. - Актуальность данных: Ни одна модель не является полностью современной. Все модели подвергаются вырождению, т.к. реальный мир окружающая среда постоянно трансформируется. Если модель не обновляется регулярно с учетом этих изменений окружающей среды, ее полезность и ценность, вероятно, уменьшатся.
Например, до недавнего времени беглый поиск термина «Спутник» мог выдать результаты о российской ракете-носителе. Однако постпандемические результаты поиска будут совершенно другими и заполнены российской вакциной от Covid.
Смещение в маркировке данных
Предвзятость в обучающих данных — это тема, которая время от времени возникает. Смещение данных может быть вызвано в процессе маркировки или аннотаторами. Смещение данных может возникнуть при использовании значительной разнородной команды аннотаторов или когда для маркировки требуется определенный контекст.
Уменьшение предвзятости это возможно, если у вас есть аннотаторы со всего мира или аннотаторы из конкретных регионов, выполняющие задачи. Если вы используете наборы данных со всего мира, существует высокая вероятность того, что аннотаторы допустят ошибки в маркировке.
Например, если вы работаете с различными кухнями разных стран мира, аннотатор в Великобритании может не знать кулинарных предпочтений азиатов. Полученный набор данных будет иметь уклон в пользу английского языка.
Как избежать ошибок в обучающих данных ИИ?
Лучший способ избежать ошибок в обучающих данных — осуществлять строгий контроль качества на каждом этапе процесса маркировки.
Вы можете избежать маркировка данных ошибки, предоставляя аннотаторам четкие и точные инструкции. Это может обеспечить единообразие и точность набора данных.
Чтобы избежать дисбаланса в наборах данных, закупайте свежие, обновленные и репрезентативные наборы данных. Убедитесь, что наборы данных являются новыми и неиспользованными, прежде чем обучение и тестирование МЛ модели.
Мощный проект искусственного интеллекта процветает на свежих, непредвзятых и надежных данных обучения, чтобы работать с максимальной эффективностью. Крайне важно проводить различные проверки качества и меры на каждом этапе маркировки и тестирования. Ошибки обучения могут стать серьезной проблемой, если они не будут идентифицированы и исправлены до того, как они повлияют на результат проекта.
Лучший способ обеспечить качественные обучающие наборы данных ИИ для вашего проекта, основанного на машинном обучении, — это нанять разнообразную группу аннотаторов, у которых есть необходимые навыки. знание предметной области и опыт работы над проектом.
Вы можете добиться быстрого успеха с командой опытных аннотаторов в Шаип которые предоставляют интеллектуальные услуги по маркировке и аннотации для различных проектов на основе ИИ. Позвоните нам и обеспечьте качество и производительность ваших проектов ИИ.
Мы часто слышим о том, как очередной сложный алгоритм искусственного интеллекта начал ошибаться или стал следовать предрассудкам, которым машины не должны быть подвержены. Почему так происходит?
Из-за чего появляются эти ложные положительные и отрицательные ответы и так ли это важно? Для начала давайте определим три термина из Матрицы смешения: точность, возврат и правильность.
Точность
Точность – это процент верно классифицированных положительных ответов. При высокой точности алгоритм правильно размечает максимальное количество верных элементов. К примеру, инструменты медицинской диагностики должны быть очень точными, так как болезнь может осложниться, если ее вовремя не обнаружить.
В ситуации, когда время настолько ценно, нужно минимизировать количество ложных негативных откликов. Точно так же, если в системе вашей компании произойдет сбой, лучше иметь точную модель, чтобы:
- устранить проблему,
- найти виновника как можно быстрее, чтобы не отрывать сотрудников от исполнения их обязанностей.
Возврат
В свою очередь, возврат – это доля в процентах возвращенных релевантных элементов. К примеру, если искать в гугле книги из серии про Гарри Поттера, возврат будет равен количеству книг, разделенному на семь.
В идеале возврат равен единице. В этом случае нас ждут проблемы, и пользователям придется вручную копаться в нерелевантных результатах поиска. Вдобавок к этому, если пользователь не получит релевантной выдачи, он вряд ли станет что-то покупать, и это навредит финансовым показателям.
Правильность
Правильность – это доля верных предсказаний от общего количества элементов в процентах. Правильность плохо служит в качестве показателя качества работы модели, особенно если классы разбалансированы. Чтобы работа с точностью, возвратом, правильностью и матрицами смешения имела смысл, обучающие данные должны содержать достоверную информацию о населении, и тогда модель сможет обучиться правильно.
Матрицы смешения
Матрицы смешения – это основа матриц эффективности затрат, то есть итоговой стоимости. Для бизнеса этот термин понять легко на примере анализа доходов и расходов. Думаю, в случае с дискриминацией одного класса относительно другого все будет сложнее.
Тем не менее эта работа, пожалуй, даже более срочная и важная. Нашим продуктам уделяют все больше внимания, и ошибки будут все более заметными и значимыми для компаний.
Ошибки машинного обучения, вызванные исходными данными
Крупнейший по объему этап работы в машинном обучении – это сбор и очищение данных, на которых будет учиться модель. Преобразование данных – это не так уж интересно, и постоянно думать о формировании отсчетов, выбросах и распределении генеральной совокупности может быть скучным и утомительным делом. Однако затем из-за таких упущений при обработке данных и появляются ошибки алгоритмов.
Каждый день в мире генерируется 2,5 эксабайт информации, так что данных для обучения наших моделей предостаточно. Есть фотографии лиц с разным цветом кожи, в очках и без них, с широкими или узкими, карими или серыми глазами.
Существуют мужские и женские голоса с самыми разными акцентами. Нежелание принимать во внимание эти культурные особенности данных может привести нас к моделям, которые будут игнорировать, и таким образом маргинализировать, определенную демографическую группу. К примеру, тот случай, когда алгоритм от Google по ошибке принимал лица афроамериканцев за горилл. Или подушки безопасности, которые должны защищать пассажиров, едва не убивали женщин в аварийной ситуации. Эти ложноположительные отклики, то есть заключения алгоритма о том, что все в порядке, когда риск действительно есть, могут стоить кому-то жизни.
Как бороться с ошибками машинного обучения
Между тем, если нам предстоит обучать машины работе с LinkedIn и резюме, то появляется научный инструмент борьбы с предрассудками, победить которые люди не в состоянии. Некорректные алгоритмы оценки рисков появляются из-за обучения моделей по наборам данных, уже содержащим эти перекосы вследствие исторических причин. Это можно исправить, если работать с историческими предрассудками так, чтобы модель учитывала пол, возраст и расу человека без дискриминации какого-либо меньшинства.
Данные, которые содержатся в моделях обучения с подкреплением, могут привести к резкому улучшению или ухудшению результатов. Экспоненциальный рост или падение качества может привести к более надежным беспилотным автомобилям, которые учатся при каждой своей поездке, или же они могут убедить человека из Северной Каролины в существовании в Вашингтоне банды по торговле людьми, которой на самом деле нет.
Почему машины начинают ошибаться? Мы учим их этому, используя ошибочные тренировочные данные.
Источник
Оригинал
Регрессия как задача машинного обучения
38 мин на чтение
(55.116 символов)
Постановка задачи регрессии

Источник: Analytics Vidhya.
Задача регрессии — это одна из основных задач машинного обучения. И хотя, большинство задач на практике относятся к другому типу — классификации, мы начнем знакомство с машинным обучением именно с регрессии. Регрессионные модели были известны задолго до появления машинного обучения как отрасли и активно применяются в статистике, эконометрике, математическом моделировании. Машинное обучение предлагает новый взгляд на уже известные модели. И этот новый взгляд позволит строить более сложные и мощные модели, чем классические математические дисциплины.
Задача регрессии относится к категории задач обучения с учителем. Это значит, что набор данных, который используется для обучения, должен иметь определенную структуру. Обычно, наборы данных для машинного обучения представляют собой таблицу, в которой по строкам перечислены разные объекты наблюдений или измерений. В столбцах — различные характеристики, или атрибуты, объектов. А на пересечении строк и столбцов — значение данной характеристики у данного объекта. Обычно один атрибут (или переменная) имеет особый характер — именно ее значение мы и хотим научиться предсказывать с помощью модели машинного обучения. Эта характеристика объекта называется целевая переменная. И если эта целевая переменная выражена числом (а точнее, некоторой непрерывной величиной) — то мы говорим о задаче регрессии.
Задачи регрессии на практике встречаются довольно часто. Например, предсказание цены объекта недвижимости — классическая регрессионная задача. В таких проблемах атрибутами выступают разные характеристики квартир или домов — площадь, этажность, расположение, расстояние до центра города, количество комнат, год постройки. В разных наборах данных собрана разная информация И, соответственно, модели тоже должны быть разные. Другой пример — предсказание цены акций или других финансовых активов. Или предсказание температуры завтрашним днем.
Во всех таких задачах нам нужно иметь данные, которые позволят осуществить такое предсказание. Да, “предсказание” — это условный термин, не всегда мы говорим о будущих событиях. Регрессионные модели используют информацию об объектах в обучающем наборе данных, чтобы сделать вывод о возможном значении целевой переменной. И для этого нужно, чтобы ее значение имело какую-то зависимость от имеющихся у нас атрибутов. Если построить модель предсказания цены акции, но на вход подать информацию о футбольных матчах — ничего не получится. Мы предполагаем, что в наборе данных собраны именно те атрибуты объектов, которые имеют влияние на на значение целевой переменной. И чем больше это предположение выполняется, тем точнее будет потенциально наша модель.
Немного поговорим о терминах. Набор данных который мы используем для обучения модели называют датасетом (dataset) или обучающей выборкой (training set). Объекты, которые описываются в датасете еще называют точками данных (data points). Целевую переменную еще называют на статистический манер зависимой переменной (dependent variable) или результативной, выходной (output), а остальные атрибуты — независимыми переменными (dependent variables), или признаками (features), или факторами, или входными переменными (input). Значения одного конкретного атрибута для всех объектов обучающей выборки часто представляют как вектор этого признака (feature vector). А всю таблицу всех атрибутов называют матрицей атрибутов (feature matrix). Соответственно, еще есть вектор целевой переменной, он не входит в матрицу атрибутов.
С точки зрения информатики, регрессионная модель — это функция, которая принимает на вход значения атрибутов какого-то конкретного объекта и выдает на выходе предполагаемое значение целевой переменной. В большинстве случаев мы предполагаем, что целевая переменная у нас одна. Если стоит задача предсказания нескольких характеристик, то их чаще воспринимают как несколько независимых задач регрессии на одних и тех же атрибутах.
Мы пока ничего не говорили о том, как изнутри устроена регрессионная модель. Это потому, что она может быть какой угодно. Это может быть математическое выражение, условный алгоритм, сложная программа со множеством ветвлений и циклов, нейронная сеть — все это можно представить регрессионной моделью. Единственное требование к модели машинного обучения — она должна быть параметрической. То есть иметь какие-то внутренние параметры, от которых тоже зависит результат вычисления. В простых случаях, чаще всего в качестве регрессионной модели используют аналитические функции. Таких функций бесконечное количество, но чаще всего используется самая простая функция, с которой мы и начнем изучение регрессии — линейная функция.
Так же надо сказать, что иногда регрессионные модели подразделяют на парную и множественную регрессии. Парная регрессия — это когда у нас всего один атрибут. Множественная — когда больше одного. Конечно, на практике парная регрессия почти не встречается, но на примере такой простой модели мы поймем основные концепции машинного обучения. Плюс, парную регрессию очень удобно и наглядно можно изобразить на графике. Когда у нас больше двух переменных, графики уже не особо построишь, и модели приходится визуализировать иначе, более косвенно.
Выводы:
- Регрессия — это задача машинного обучения с учителем, которая заключается в предсказании некоторой непрерывной величины.
- Для использования регрессионных моделей нужно, чтобы в датасете были характеристики объектов и “правильные” значения целевой переменной.
- Примеры регрессионных задач — предсказание цены акции, оценка цены объекта недвижимости.
- Задача регрессии основывается на предположении, что значение целевой переменной зависит от значения признаков.
- Регрессионная модель принимает набор значений и выдает предсказание значения целевой переменной.
- В качестве регрессионных моделей часто берут аналитические функции, например, линейную.
Линейная регрессия с одной переменной
Функция гипотезы

Напомним, что в задачах регрессии мы принимаем входные переменные и пытаемся получить более-менее достоверное значение целевой переменной. Любая функция, даже самая простая линейная может выдавать совершенно разные значения для одних и тех же входных данных, если в функции будут разные параметры. Поэтому, любая регрессионная модель — это не какая-то конкретная математическая функция, а целое семейство функций. И задача алгоритма обучения — подобрать значения параметров таким образом, чтобы для объектов обучающей выборки, для которых мы уже знаем правильные ответы, предсказанные (или теоретические, вычисленные из модели) значения были как можно ближе к тем, которые есть в датасете (эмпирические, истинные значения).
Парная, или одномерная (univariate) регрессия используется, когда вы хотите предсказать одно выходное значение (чаще всего обозначаемое $y$), зависящее от одного входного значения (обычно обозначается $x$). Сама функция называется функцией гипотезы или моделью. В качестве функции гипотезы для парной регрессии можно выбрать любую функцию, но мы пока потренируемся с самой простой функцией одной переменной — линейной функцией. Тогда нашу модель можно назвать парной линейной регрессией.
В случае парной линейной регрессии функция гипотезы имеет следующий общий вид:
[hat{y} = h_b (x) = b_0 + b_1 x]
Обратите внимание, что это похоже на уравнение прямой. Эта модель соответствует множеству всех возможных прямых на плоскости. Когда мы конкретизируем модель значениями параметров (в данном случае — $b_0$ и $b_1$), мы получаем конкретную прямую. И наша задача состоит в том, чтобы выбрать такую прямую, которая бы лучше всего “легла” в точки из нашей обучающей выборки.
В данном случае, мы пытаемся подобрать функцию h(x) таким образом, чтобы отобразить данные нам значения x в данные значения y.
Допустим, мы имеем следующий обучающий набор данных:
| входная переменная x | выходная переменная y |
| 0 | 4 |
| 1 | 7 |
| 2 | 7 |
| 3 | 8 |
Мы можем составить случайную гипотезу с параметрами $ b_0 = 2, b_1 = 2 $. Тогда для входного значения $ x=1 $ модель выдаст предсказание, что $ y=4 $, что на 3 меньше данного. Значение $y$б которое посчитала модель будем называть теоретическим или предсказанным (predicted), а значение, которое дано в наборе данных — эмпирическим или истинным (true). Задача регрессии состоит в нахождении таких параметров функции гипотезы, чтобы она отображала входные значения в выходные как можно более точно, или, другими словами, описывала линию, наиболее точно ложащуюся в данные точки на плоскости $(x, y)$.
Выводы:
- Модель машинного обучения — это параметрическая функция.
- Задача обучения состоит в том, чтобы подобрать параметры модели таким образом, чтобы она лучше всего описывала обучающие данные.
- Парная линейная регрессия работает, если есть всего одна входящая переменная.
- Парная линейная регрессия — одна из самых простых моделей машинного обучения.
- Парная линейная регрессия соответствует множеству всех прямых на плоскости. Из них мы выбираем одну, наиболее подходящую.
Функция ошибки
Как мы уже говорили, разные значения параметров дают разные модели. Для того, чтобы подобрать наилучшую модель, нам нужно средство измерения “точности” модели, некоторая функция, которая показывает, насколько модель хорошо или плохо соответствует имеющимся данным.

В простых случаях мы можем отличить хорошие модели от плохих, только взглянув на график. Но это затруднительно, если количество признаков очень велико, если модели лишь немного отличаются друг от друга. Да и для автоматизации процесса нужен способ формализовать наше общее представление о том, что модель “ложится” в точки данных.
Такая функция называется функцией ошибки (cost function). Она измеряет отклонения теоретических значений (то есть тех, которые предсказывает модель) от эмпирических (то есть тех, которые есть в данных). Чем выше значение функции ошибки, тем хуже модель соответствует имеющимся данным, хуже описывает их. Если модель полностью соответствует данным, то значение функции ошибки будет нулевым.

В задачах регрессии в качестве функции ошибки чаще всего берут среднеквадратичное отклонение теоретических значений от эмпирических. То есть сумму квадратов отклонений, деленную на удвоенное количество измерений.
[J(b_0, b_1)
= frac{1}{2m} sum_{i=1}^{m} (hat{y_i} — y_i)^2
= frac{1}{2m} sum_{i=1}^{m} (h_b(x_i) — y_i)^2]
Эту функцию называют «функцией квадрата ошибки» или «среднеквадратичной ошибкой» (mean squared error, MSE). Среднее значение уменьшено вдвое для удобства вычисления градиентного спуска, так как производная квадратичной функции будет отменять множитель 1/2. Вообще, функцию ошибки можно свободно домножить или разделить на любое число (положительное), ведь нам не важна конкретная величина этой функции. Нам важно, что какие-то модели (то есть наборы значений параметров модели) имеют низкую ошибку, они нам подходят больше, а какие-то — высокую ошибку, они подходят нам меньше.
Возведение в квадрат в этой формуле нужно для того, чтобы положительные отклонения не компенсировали отрицательные. Можно было бы для этого брать, например, абсолютное значение, но эта функция не везде дифференцируема, а это станет нам важно позднее.
Обратите внимание, что в качестве аргументов у функции ошибки выступают параметры нашей функции гипотезы. Ведь функция ошибки оценивает отклонение конкретной функции гипотезы (то есть набора значений параметров этой функции) от эмпирических значений, то есть ставит в соответствие каждому набору параметров модели число, характеризующее ошибку этого набора.
Давайте проследим формирование функции ошибки на еще более простом примере. Возьмем упрощенную форму линейной модели — прямую пропорциональность. Она выражается формулой:
[hat{y} = h_b (x) = b_1 x]
Эта модель поможет нам, так как у нее всего один параметр. И функцию ошибки можно будет изобразить на плоскости. Возьмем фиксированный набор точек и попробуем несколько значений параметра для вычисления функции ошибки. Слева на графике изображены точки данных и текущая функция гипотезы, а на правом графике бы будем отмечать значение использованного параметра (по горизонтали) и получившуюся величину функции ошибки (по вертикали):

При значении $b_1 = -1$ линия существенно отклоняется от точек. Отметим уровень ошибки (примерно 10) на правом графике.

Если взять значение $b_1 = 0$ линия гораздо ближе к точкам, но ошибка все еще есть. Отметим новое значение на правом графике в точке 0.

При значении $b_1 = 1$ график точно ложится в точки, таким образом ошибка становится равной нулю. Отмечаем ее так же.

При дальнейшем увеличении $b_1$ линия становится выше точек. Но функция ошибки все равно будет положительной. Теперь она опять станет расти.

На этом примере мы видим еще одно преимущество возведения в квадрат — это то, что такая функция в простых случаях имеет один глобальный минимум. На правом графике формируется точка за точкой некоторая функция, которая похожа очертаниями на параболу. Но мы не знаем аналитического вида этой параболы, мы можем лишь строить ее точка за точкой.
В нашем примере, в определенной точке функция ошибки обращается в ноль. Это соответствует “идеальной” функции гипотезы. То есть такой, когда она проходит четко через все точки. В нашем примере это стало возможно благодаря тому, что точки данных и так располагаются на одной прямой. В общем случае это не выполняется и функция ошибки, вообще говоря, не обязана иметь нули. Но она должна иметь глобальный минимум. Рассмотрим такой неидеальный случай:





Какое бы значение параметра мы не использовали, линейная функция неспособна идеально пройти через такие три точки, которые не лежат на одной прямой. Эта ситуация называется “недообучение”, об этом мы еще будем говорить дальше. Это значит, что наша модель слишком простая, чтобы идеально описать данные. Но зачастую, идеальная модель и не требуется. Важно лишь найти наилучшую модель из данного класса (например, линейных функций).
Выше мы рассмотрели упрощенный пример с функцией гипотезы с одним параметром. Но у парной линейной регрессии же два параметра. В таком случае, функция ошибки будет описывать не параболу, а параболоид:

Теперь мы можем конкретно измерить точность нашей предсказывающей функции по сравнению с правильными результатами, которые мы имеем, чтобы мы могли предсказать новые результаты, которых у нас нет.
Если мы попытаемся представить это наглядно, наш набор данных обучения будет разбросан по плоскости x-y. Мы пытаемся подобрать прямую линию, которая проходит через этот разбросанный набор данных. Наша цель — получить наилучшую возможную линию. Лучшая линия будет такой, чтобы средние квадраты вертикальных расстояний точек от линии были наименьшими. В лучшем случае линия должна проходить через все точки нашего набора данных обучения. В таком случае значение J будет равно 0.


В более сложных моделях параметров может быть еще больше, но это не важно, ведь нам не нужно строить функцию ошибки, нам нужно лишь оптимизировать ее.
Выводы:
- Функция ошибки нужна для того, чтобы отличать хорошие модели от плохих.
- Функция ошибки показывает численно, насколько модель хорошо описывает данные.
- Аргументами функции ошибки являются параметры модели, ошибка зависит от них.
- Само значение функции ошибки не несет никакого смысла, оно используется только в сравнении.
- Цель алгоритма машинного обучения — минимизировать функцию ошибки, то есть найти такой набор параметров модели, при которых ошибка минимальна.
- Чаще всего используется так называемая L2-ошибка — средний квадрат отклонений теоретических значений от эмпирических (метрика MSE).
Метод градиентного спуска
Таким образом, у нас есть функция гипотезы, и способ оценить, насколько хорошо конкретная гипотеза вписывается в данные. Теперь нам нужно подобрать параметры функции гипотезы. Вот где приходит на помощь метод градиентного спуска.
Это происходит при помощи производной функции ошибки. Необходимое условие минимума функции — обращение в ноль ее производной. А так как мы знаем, что квадратичная функция имеет один глобальный экстремум — минимум, то наша задача очень проста — вычислить производную функции ошибки и найти, где она равна нулю.
Давайте найдем производную среднеквадратической функции ошибки:
[J(b_0, b_1) = frac{1}{2m} sum_{i=1}^{m} (h_b(x_i) — y_i)^2]
[J(b_0, b_1) = frac{1}{2m} sum_{i=1}^{m} (h_b(x_i) — y_i)^2]
[frac{partial}{partial b_i} J =
frac{1}{m} sum_{i=1}^{m} (h_b(x_i) — y^{(i)}) cdot frac{partial}{partial b_i} h_b(x_i)]
[J(b_0, b_1) = frac{1}{2m} sum_{i=1}^{m} (b_0 + b_1 x_i — y_i)^2]
[frac{partial J}{partial b_0} =
frac{1}{m} sum (b_0 + b_1 x_i — y_i) =
frac{1}{m} sum (h_b(x_i) — y_i)]
[frac{partial J}{partial b_1} =
frac{1}{m} sum (b_0 + b_1 x_i — y_i) cdot x_i =
frac{1}{m} sum (h_b(x_i) — y_i) cdot x_i]
Проблема в том, что мы не можем просто решить эти уравнения аналитически. Ведь мы не знаем общий вид функции ошибки, не то, что ее производной. Ведь он зависит, от всех точек данных. Но мы можем вычислить эту функцию (и ее производную) в любой точке. А точка на этой функции — это конкретный набор значений параметров модели. Поэтому пришлось изобрести численный алгоритм. Он работает следующим образом.
Сначала, мы выбираем произвольное значение параметров модели. То есть, произвольную точку в области определения функции. Мы не знаем, является ли эта точка оптимальной (скорее нет), не знаем, насколько она далека от оптимума. Но мы можем вычислить направление к оптимуму. Ведь мы знаем наклон касательной к графику функции ошибки.

Наклон касательной является производной в этой точке, и это даст нам направление движения в сторону самого крутого уменьшения значения функции. Если представить себе функцию одной переменной (параболу), то там все очень просто. Если производная в точке отрицательна, значит функция убывает, значит, что оптимум находится справа от данной точки. То есть, чтобы приблизиться к оптимуму надо увеличить аргумент функции. Если же производная положительна, то все наоборот — функция возрастает, оптимум находится слева и нам нужно уменьшить значение аргумента. Причем, чем дальше от оптимума, тем быстрее возрастает или убывает функция. То есть значение производной дает нам не только направление, но и величину нужного шага. Сделав шаг, пропорциональный величине производной и в направлении, противоположном ей, можно повторить процесс и еще больше приблизиться к оптимуму. С каждой итерацией мы будем приближаться к минимуму ошибки и математически доказано, что мы можем приблизиться к ней произвольно близко. То есть, данный метод сходится в пределе.
В случае с функцией нескольких переменных все немного сложнее, но принцип остается прежним. Только мы оперируем не полной производной функции, а вектором частных производных по каждому параметру. Он задает нам направление максимального увеличения функции. Чтобы получить направление максимального спада функции нужно просто домножить этот вектор на -1. После этого нужно обновить значения каждого компонента вектора параметров модели на величину, пропорциональную соответствующему компоненту вектора градиента. Таким образом мы делаем шаги вниз по функции ошибки в направлении с самым крутым спуском, а размер каждого шага пропорционален определяется параметром $alpha$, который называется скоростью обучения.
Алгоритм градиентного спуска:
повторяйте до сходимости:
[b_j := b_j — alpha frac{partial}{partial b_j} J(b_0, b_1)]
где j=0,1 — представляет собой индекс номера признака.
Это общий алгоритм градиентного спуска. Она работает для любых моделей и для любых функций ошибки. Это итеративный алгоритм, который сходится в пределе. То есть, мы никогда не придем в сам оптимум, но можем приблизиться к нему сколь угодно близко. На практике нам не так уж важно получить точное решение, достаточно решения с определенной точностью.
Алгоритм градиентного спуска имеет один параметр — скорость обучения. Он влияет на то, как быстро мы будем приближаться к оптимуму. Кажется, что чем быстрее, тем лучше, но оказывается, что если значение данного параметра слишком велико, то мы буем постоянно промахиваться и алгоритм будет расходиться.

Алгоритм градиентного спуска для парной линейной регрессии:
повторяйте до сходимости:
[b_0 := b_0 — alpha frac{1}{m} sum_{i=1}^{m} (h_b(x^{(i)} )- y^{(i)})]
[b_1 := b_1 — alpha frac{1}{m} sum_{i=1}^{m} (h_b(x^{(i)}) — y^{(i)}) cdot x^{(i)}]
На практике “повторяйте до сходимости” означает, что мы повторяем алгоритм градиентного спуска до тех пор, пока значение функции ошибки не перестанет значимо изменяться. Это будет означать, что мы уже достаточно близко к минимуму и дальнейшие шаги градиентного спуска слишком малы, чтобы быть целесообразными. Конечно, это оценочное суждение, но на практике обычно, нескольких значащих цифр достаточно для практического применения моделей машинного обучения.
Алгоритм градиентного спуска имеет одну особенность, про которую нужно помнить. Он в состоянии находить только локальный минимум функции. Он в принципе, по своей природе, локален. Поэтому, если функция ошибки будет очень сложна и иметь несколько локальных оптимумов, то результат работы градиентного спуска будет зависеть от выбора начальной точки:


На практике эту проблему решают методом семплирования — запускают градиентный спуск из множества случайных точек и выбирают то минимум, который оказался меньше по значению функции ошибки. Но этот подход понадобится нам при рассмотрении более сложных и глубоких моделей машинного обучения. Для простых линейных, полиномиальных и других моделей метод градиентного спуска работает прекрасно. В настоящее время этот алгоритм — это основная рабочая лошадка классических моделей машинного обучения.
Выводы:
- Метод градиентного спуска нужен, чтобы найти минимум функции, если мы не можем ее вычислить аналитически.
- Это численный итеративный алгоритм локальной оптимизации.
- Для запуска градиентного спуска нужно знать частную производную функции ошибки.
- Для начала мы берем произвольные значения параметров, затем обновляем их по данной формуле.
- Доказано, что этот метод сходится к локальному минимуму.
- Если функция ошибки достаточно сложная, то разные начальные точки дадут разный результат.
- Метод градиентного спуска имеет свой параметр — скорость обучения. Обычно его подстаивают автоматически.
- Метод градиентного спуска повторяют много раз до тех пор, пока функция ошибки не перестанет значимо изменяться.
Регрессия с несколькими переменными
Множественная линейная регрессия

Парная регрессия, как мы увидели выше, имеет дело с объектами, которые характеризуются одним числовым признаком ($x$). На практике, конечно, объекты характеризуются несколькими признаками, а значит в модели должна быть не одна входящая переменная, а несколько (или, что то же самое, вектор). Линейная регрессия с несколькими переменными также известна как «множественная линейная регрессия». Введем обозначения для уравнений, где мы можем иметь любое количество входных переменных:
$ x^{(i)} $- вектор-столбец всех значений признаков i-го обучающего примера;
$ x_j^{(i)} $ — значение j-го признака i-го обучающего примера;
$ x_j $ — вектор j-го признака всех обучающих примеров;
m — количество примеров в обучающей выборке;
n — количество признаков;
X — матрица признаков;
b — вектор параметров регрессии.
Задачи множественной регрессии уже очень сложно представить на графике, ведь количество параметров каждого объекта обучающей выборки соответствует измерению, в котором находятся точки данных. Плюс нужно еще одно измерение для целевой переменной. И вместо того, чтобы подбирать оптимальную прямую, мы будем подбирать оптимальную гиперплоскость. Но в целом идея линейной регрессии остается неизменной.
Для удобства примем, что $ x_0^{(i)} = 1 $ для всех $i$. Другими словами, мы ведем некий суррогатный признак, для всех объектов равный единице. Это никак не сказывается на самой функции гипотезы, это лишь условность обозначения, но это сильно упростит математические выкладки, особенно в матричной форме.
Теперь определим множественную форму функции гипотезы следующим образом, используя несколько признаков. Она очень похожа на парную, но имеет больше входных переменных и, как следствие, больше параметров.
Общий вид модели множественной линейной регрессии:
[h_b(x) = b_0 + b_1 x_1 + b_2 x_2 + … + b_n x_n]
Или в матричной форме:
[h_b(x) = X cdot vec{b}]
Используя определение матричного умножения, наша многопараметрическая функция гипотезы может быть кратко представлена в виде: $h(x) = B X$.
Обратите внимание, что в любой модели линейной регрессии количество параметров на единицу больше количества входных переменных. Это верно для любой линейной модели машинного обучения. Вообще, всегда чем больше признаков, тем больше параметров. Это будет важно для нас позже, когда мы будем говорить о сложности моделей.
Теперь, когда мы знаем виды функции гипотезы, то есть нашей модели, мы можем переходить к следующему шагу: функции ошибки. Мы построим ее по аналогии с функцией ошибки для парной модели. Для множественной регрессии функция ошибки от вектора параметров b выглядит следующим образом:
Функция ошибки для множественной линейной регрессии:
[J(b) = frac{1}{2m} sum_{i=1}^{m} (h_b(x^{(i)}) — y^{(i)})^2]
Или в матричной форме:
[J(b) = frac{1}{2m} (X b — vec{y})^T (X b — vec{y})]
Обратите внимание, что мы специально не раскрываем выражение (h_b(x^{(i)})). Это нужно, чтобы подчеркнуть, что форма функции ошибки не зависит от функции гипотезы, она выражается через нее.
Теперь нам нужно взять производную этой функции ошибки. Здесь уже нужно знать производную самой функции гипотезы, так как:
[frac{partial}{partial b_i} J =
frac{1}{m} sum_{i=1}^{m} (h_b(x^{(i)}) — y^{(i)}) cdot frac{partial}{partial b_i} h_b(x^{(i)})]
В такой формулировке мы представляем частные производные функции ошибки (градиент) через частную производную функции гипотезы. Это так называемое моделенезависимое представление градиента. Ведь для этой формулы совершенно неважно, какой функцией будет наша гипотеза. Пока она является дифференцируемой, мы можем использовать градиент ее функции ошибки. Именно поэтому метод градиентного спуска работает с любыми аналитическими моделями, и нам не нужно каждый раз заново “переизобретать” математику градиентного спуска, адаптировать ее к каждой конкретной модели машинного обучения. Достаточно изучить этот метод один раз, в общей форме.
Метод градиентного спуска для множественной регрессии определяется следующими уравнениями:
повторять до сходимости:
[b_0 := b_0 — alpha frac{1}{m} sum_{i=1}^{m} (h_b(x^{(i)}) — y^{(i)}) cdot x_0^{(i)}]
[b_1 := b_1 — alpha frac{1}{m} sum_{i=1}^{m} (h_b(x^{(i)}) — y^{(i)}) cdot x_1^{(i)}]
[b_2 := b_2 — alpha frac{1}{m} sum_{i=1}^{m} (h_b(x^{(i)}) — y^{(i)}) cdot x_2^{(i)}]
[…]
Или в матричной форме:
[b := b — frac{alpha}{m} X^T (X b — vec{y})]
Выводы:
- Множественная регрессия очень похожа на парную, но с большим количеством признаков.
- Для удобства и однообразия, почти всегда обозначают $x_0 = 1$.
- Признаки образуют матрицу, поэтому уравнения множественной регрессии часто приводят в матричной форме, так короче.
- Алгоритм градиентного спуска для множественной регрессии точно такой же, как и для парной.
Нормализация признаков
Мы можем ускорить сходимость метода градиентного спуска, преобразовав входные данные таким образом, чтобы все атрибуты имели значения примерно в том же диапазоне. Это называется нормализация данных — приведение всех признаков к одной шкале. Это ускоряет сходимость градиентного спуска за счет эффекта масштаба. Дело в том, что зачастую значения разных признаков измеряются по шкалам с очень разным порядком величины. Например, $x_1$ измеряется в миллионах, а $x_2$ — в долях единицы.
В таком случае форма функции ошибки будет очень вытянутой. Это не проблема для математической формализации градиентного спуска — при достаточно малых $alpha$ метод все равно рано или поздно сходится. Проблема в практической реализации. Получается, что если выбрать скорость обучения выше определенного предела по самому компактному признаку, спуск разойдется. Значит, скорость обучения надо делать меньше. Но тогда в направлении второго признака спуск будет проходить слишком медленно. И получается, что градиентный спуск потребует гораздо больше итераций для завершения.
Эту проблему можно решить если изменить диапазоны входных данных, чтобы они выражались величинами примерно одного порядка. Это не позволит одному измерению численно доминировать над другим. На практике применяют несколько алгоритмов нормализации, самые распространенные из которых — минимаксная нормализация и стандартизация или z-оценки.
Минимаксная нормализация — это изменение входных данных по следующей формуле:
[x’ = frac{x — x_{min}}{x_{max} — x_{min}}]
После преобразования все значения будут лежать в диапазоне $x in [0; 1]$.
Z-оценки или стандартизация производится по формуле:
[x’ = frac{x — M[x]}{sigma_x}]
В таком случае данный признак приводится к стандартному распределению, то есть такому, у которого среднее 0, а дисперсия — 1.
У каждого из этих двух методов нормализации есть по два параметра. У минимаксной — минимальное и максимальное значение признака. У стандартизации — выборочные среднее и дисперсия. Параметры нормализации, конечно, вычисляются по каждому признаку (столбцу данных) отдельно. Причем, эти параметры надо запомнить, чтобы при использовании модели для предсказании использовать именно их (вычисленные по обучающей выборке). Даже если вы используете тестовую выборку, ее надо нормировать с использованием параметров, вычисленных по обучающей. Да, при этом может получиться, что при применении модели на данных, которых не было в обучающей выборке, могут получиться значения, например, меньше нуля или больше единицы (при использовании минимаксной нормализации). Это не страшно, главное, что будет соблюдена последовательность вычисления нормированных значений.
Целевая переменная не нормируется.
При использовании библиотечных моделей машинного обучения беспокоиться о нормализации входных данных вручную, как правило, не нужно. Большинство готовых реализаций моделей уже включают нормализацию как неотъемлемый этап подготовки данных. Более того, некоторые типы моделей обучения с учителем вовсе не нуждаются в нормализации. Но об этом пойдет речь в следующих главах.
Выводы:
- Нормализация нужна для ускорения метода градиентного спуска.
- Есть два основных метода нормализации — минимаксная и стандартизация.
- Параметры нормализации высчитываются по обучающей выборке.
- Нормализация встроена в большинство библиотечных методов.
- Некоторые методы более чувствительны к нормализации, чем другие.
- Нормализацию лучше сделать, чем не делать.
Полиномиальная регрессия

Функция гипотезы не обязательно должна быть линейной, если это не соответствует данным. На практике вы не всегда будете иметь данные, которые можно хорошо аппроксимировать линейной функцией. Наглядный пример вы видите на иллюстрации. Вполне очевидно, что в среднем увеличение целевой переменной замедляется с ростом входной переменной. Это значит, что данные демонстрируют нелинейную динамику. И это так же значит, что мы никак не сможем их хорошо приблизить линейной моделью.
Надо подчеркнуть, что это не свидетельствует о несовершенстве наших методов оптимизации. Мы действительно можем найти самую лучшую линейную функцию для данных точек, но проблема в том, что мы всегда выбираем лучшую функцию из некоторого класса функций, в данном случае — линейных. То есть проблема не в алгоритмах оптимизации, а в ограничении самого вида модели.
вполне логично предположить, что для описания таких нелинейных наборов данных следует использовать нелинейные же функции моделей. Но очень бы не хотелось, для каждого нового класса функций изобретать собственный метод оптимизации, поэтому мы постараемся максимально “переиспользовать” те подходы, которые описали выше. И механизм множественной регрессии в этом сильно поможет.
Мы можем изменить поведение или кривую нашей функции гипотезы, сделав ее квадратичной, кубической или любой другой формой.
Например, если наша функция гипотезы
$ hat{y} = h_b (x) = b_0 + b_1 x $,
то мы можем добавить еще один признак, основанный на $ x_1 $, получив квадратичную функцию
[hat{y} = h_b (x) = b_0 + b_1 x + b_2 x^2]
или кубическую функцию
[hat{y} = h_b (x) = b_0 + b_1 x + b_2 x^2 + b_3 x^3]
В кубической функции мы по сути ввели два новых признака:
$ x_2 = x^2, x_3 = x^3 $.
Точно таким же образом, мы можем создать, например, такую функцию:
[hat{y} = h_b (x) = b_0 + b_1 x + b_2 sqrt{x}]
В любом случае, мы из парной линейной функции сделали какую-то другую функцию. И к этой нелинейной функции можно относиться по разному. С одной стороны, это другой класс функций, который обладает нелинейным поведением, а следовательно, может описывать более сложные зависимости в данных. С другой стороны, это линейна функция от нескольких переменных. Только сами эти переменные оказываются в функциональной зависимости друг от друга. Но никто не говорил, что признаки должны быть независимы.
И вот такое представление нелинейной функции как множественной линейной позволяет нам без изменений воспользоваться алгоритмом градиентного спуска для множественной линейной регрессии. Только вместо $ x_2, x_3, … , x_n $ нам нужно будет подставить соответствующие функции от $ x_1 $.

Источник: Wikimedia.
Очевидно, что нелинейных функций можно придумать бесконечное количество. Поэтому встает вопрос, как выбрать нужный класс функций для решения конкретной задачи. В случае парной регрессии мы можем взглянув на график точек обучающей выборки сделать предположение о том, какой вид нелинейной зависимости связывает входную и целевую переменные. Но если у нас множество признаков, просто так проанализировать график нам не удастся. Поэтому по умолчанию используют полиномиальную регрессию, когда в модель добавляют входные переменные второго, третьего, четвертого и так далее порядков.
Порядок полиномиальной регрессии подбирается в качестве компромисса между качеством получаемой регрессии, и вычислительной сложностью. Ведь чем выше порядок полинома, тем более сложные зависимости он может аппроксимировать. И вообще, чем выше степень полинома, тем меньше будет ошибка при прочих равных. Если степень полинома на единицу меньше количества точек — ошибка будет нулевая. Но одновременно с этим, чем выше степень полинома, тем больше в модели параметров, тем она сложнее и занимает больше времени на обучение. Есть еще вопросы переобучения, но про это мы поговорим позднее.
А что делать, если изначально в модели было несколько признаков? Тогда обычно для определенной степени полинома берутся все возможные комбинации признаком соответствующей степени и ниже. Например:
Для регрессии с двумя признаками.
Линейная модель (полином степени 1):
[h_b (x) = b_0 + b_1 x_1 + b_2 x_2]
Квадратичная модель (полином степени 2):
[h_b (x) = b_0 + b_1 x + b_2 x_2 + b_3 x_1^2 + b_4 x_2^2 + b_5 x_1 x_2]
Кубическая модель (полином степени 3):
[hat{y} = h_b (x) = b_0 + b_1 x_1 + b_2 x_2 + b_3 x_1^2 + b_4 x_2^2 + b_5 x_1 x_2 + b_6 x_1^3 + b_7 x_2^3 + b_7 x_1^2 x_2 + b_8 x_1 x_2^2]
При этом количество признаков и, соответственно, количество параметров растет экспоненциально с ростом степени полинома. Поэтому полиномиальные модели обычно очень затратные в обучении при больших степенях. Но полиномы высоких степеней более универсальны и могут аппроксимировать более сложные данные лучше и точнее.
Выводы:
- Данные в датасете не всегда располагаются так, что их хорошо может описывать линейная функция.
- Для описания нелинейных зависимостей нужна более сложная, нелинейная модель.
- Чтобы не изобретать алгоритм обучения заново, можно просто ввести в модель суррогатные признаки.
- Суррогатный признак — это новый признак, который считается из существующих атрибутов.
- Чаще всего используют полиномиальную регрессию — это когда в модель вводят полиномиальные признаки — степени существующих атрибутов.
- Обычно берут все комбинации факторов до какой-то определенной степени полинома.
- Полиномиальная регрессия может аппроксимировать любую функцию, нужно только подобрать степень полинома.
- Чем больше степень полиномиальной регрессии, тем она сложнее и универсальнее, но вычислительно сложнее (экспоненциально).
Практическое построение регрессии
В данном разделе мы посмотрим, как можно реализовать методы линейной регрессии на практике. Сначала мы попробуем создать алгоритм регрессии с нуля, а затем воспользуемся библиотечной функцией. Это поможет нам более полно понять, как работают модели машинного обучения в целом и в библиотеке sckikit-learn (самом популярном инструменте для создания и обучения моделей на языке программирования Python) в частности.
Для понимания данного раздела предполагаем, что читатель знаком с основами языка программирования Python. Нам понадобится знание его базового синтаксиса, немного — объектно-ориентированного программирования, немного — использования стандартных библиотек и модулей. Никаких продвинутых возможностей языка (типа метапрограммирования или декораторов) мы использовать не будем.
Как должны быть представлены данные для машинного обучения?
Применение любых моделей машинного обучения начинается с подготовки данных в необходимом формате. Для этого очень удобными для нас будут библиотеки numpy и pandas. Они практически всегда используются совместно с библиотекой sckikit-learn и другими инструментами машинного обучения. В первую очередь мы будем использовать numpy для создания массивов и операций с векторами и матрицами. Pandas нам понадобится для работы с табличными структурами — датасетами.
Если вы хотите самостоятельно задать в явном виде данные обучающей выборки, то нет ничего лучше использования обычных массивов ndarray. Обычно в одном массиве хранятся значения атрибутов — x, а в другом — значения целевой переменной — y.
1
2
3
4
5
6
7
8
9
10
11
import numpy as np
x = np.array([1.46, 1.13, -2.30, 1.74, 0.04,
-0.61, 0.32, -0.76, 0.58, -1.10,
0.87, 1.62, -0.53, -0.25, -1.07,
-0.38, -0.17, -0.32, -2.06, -0.88, ])
y = np.array([101.16, 78.44, -159.24, 120.72, 2.92,
-42.33, 22.07, -52.67, 40.32, -76.10,
59.88, 112.38, -36.54, -17.25, -74.24,
-26.57, -11.93, -22.31, -142.54, -60.74,])
Если мы имеем дело с задачей множественной регрессии, то в массиве атрибутов будет уже двумерный массив, состоящий из нескольких векторов атрибутов, вот так:
1
2
3
4
5
x = np.array([
[0, 1, 2, 3, 4],
[5, 4, 9, 6, 3],
[7.8, -0.1, 0.0, -2.14, 10.7],
])
Важно следить за тем, чтобы в массиве атрибутов в каждом вложенном массиве количество элементов было одинаковым и в свою очередь совпадало с количеством элементов в массиве целевой переменной. Это называется соблюдение размерности задачи. Если размерность не соблюдается, то модели машинного обучения будут работать неправильно. А библиотечные функции чаще всего будут выдавать ошибку, связанную с формой массива (shape).
Но чаще всего вы не будете задавать исходные данные явно. Практически всегда их приходится читать из каких-либо входных файлов. Удобнее всего это сделать при помощи библиотеки pandas вот так:
1
2
3
4
import pandas as pd
x = pd.read_csv('x.csv', index_col=0)
y = pd.read_csv('y.csv', index_col=0)
Или, если данные лежат в одном файле в общей таблице (что происходит чаще всего), тогда его читают в один датафрейм, а затем выделяют целевую переменную, и факторные переменные:
1
2
3
4
5
6
7
8
import pandas as pd
data = pd.read_csv('data.csv', index_col=0)
y = data.Y
y = data["Y"]
x = data.drop(["Y"])
Обратите внимание, что матрицу атрибутов проще всего сформировать, удалив из полной таблицы целевую переменную. Но, если вы хотите выбрать только конкретные столбцы, тогда можно использовать более явный вид, через перечисление выбранных колонок.
Если вы используете pandas или numpy для формирования массивов данных, то получившиеся переменные будут разных типов — DataFrame или ndarray, соответственно. Но на дальнейшую работу это не повлияет, так как интерфейс работы с этими структурами данных очень похож. Например, неважно, какие именно массивы мы используем, их можно изобразить на графике вот так:
1
2
3
4
5
import maiplotlib.pyplot as plt
plt.figure()
plt.scatter(x, y)
plt.show()
Конечно, такая визуализация будет работать только в случае задачи парной регрессии. Если x многомерно, то простой график использовать не получится.
Давайте соберем весь наш код вместе:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
import numpy as np
import pandas as pd
import maiplotlib.pyplot as plt
# x = pd.read_csv('x.csv', index_col=0)
x = np.array([1.46, 1.13, -2.30, 1.74, 0.04,
-0.61, 0.32, -0.76, 0.58, -1.10,
0.87, 1.62, -0.53, -0.25, -1.07,
-0.38, -0.17, -0.32, -2.06, -0.88, ])
# y = pd.read_csv('y.csv', index_col=0)
y = np.array([101.16, 78.44, -159.24, 120.72, 2.92,
-42.33, 22.07, -52.67, 40.32, -76.10,
59.88, 112.38, -36.54, -17.25, -74.24,
-26.57, -11.93, -22.31, -142.54, -60.74,])
plt.figure()
plt.scatter(x, y)
plt.show()
Это код генерирует вот такой вот график:

Как работает метод машинного обучения “на пальцах”?
Для того, чтобы более полно понимать, как работает метод градиентного спуска для линейной регрессии, давайте реализуем его самостоятельно, не обращаясь к библиотечным методам. На этом примере мы проследим все шаги обучения модели.
Мы будем использовать объектно-ориентированный подход, так как именно он используется в современных библиотеках. Начнем строить класс, который будет реализовывать метод парной линейной регрессии:
1
2
3
4
5
class hypothesis(object):
"""Модель парной линейной регрессии"""
def __init__(self):
self.b0 = 0
self.b1 = 0
Здесь мы определили конструктор класса, который запоминает в полях экземпляра параметры регрессии. Начальные значения этих параметров не очень важны, так как градиентный спуск сойдется из любой точки. В данном случае мы выбрали нулевые, но можно задать любые другие начальные значения.
Реализуем метод, который принимает значение входной переменной и возвращает теоретическое значение выходной — это прямое действие нашей регрессии — метод предсказания результата по факторам (в случае парной регрессии — по одному фактору):
1
2
def predict(self, x):
return self.b0 + self.b1 * x
Название выбрано не случайно, именно так этот метод называется и работает в большинстве библиотечных классов.
Теперь зададим функцию ошибки:
1
2
def error(self, X, Y):
return sum((self.predict(X) - Y)**2) / (2 * len(X))
В данном случае мы используем простую функцию ошибки — среднеквадратическое отклонение (mean squared error, MSE). Можно использовать и другие функции ошибки. Именно вид функции ошибки будет определять то, какой вид регрессии мы реализуем. Существует много разных вариаций простого алгоритма регрессии. О большинстве распространенных методах регрессии можно почитать в официальной документации sklearn.
Теперь реализуем метод градиентного спуска. Он должен принимать массив X и массив Y и обновлять параметры регрессии в соответствии в формулами градиентного спуска:
1
2
3
4
5
6
def BGD(self, X, Y):
alpha = 0.5
dJ0 = sum(self.predict(X) - Y) /len(X)
dJ1 = sum((self.predict(X) - Y) * X) /len(X)
self.b0 -= alpha * dJ0
self.b1 -= alpha * dJ1
О выборе конкретного значения alpha мы говорить пока не будем,на практике его довольно просто подбирают, мы же возьмем нейтральное значение.
Давайте создадим объект регрессии и проверим начальное значение ошибки. В примерах приведены значения на модельном наборе данных, но этот метод можно использовать на любых данных, которые подходят по формату — x и y должны быть одномерными массивами чисел.
1
2
3
4
5
6
7
8
hyp = hypothesis()
print(hyp.predict(0))
print(hyp.predict(100))
J = hyp.error(x, y)
print("initial error:", J)
0
0
initial error: 36271.58344889084
Как мы видим, для начала оба параметра регрессии равны нулю. Конечно, такая модель не дает надежных предсказаний, но в этом и состоит суть метода градиентного спуска: начиная с любого решения мы постепенно его улучшаем и приходим к оптимальному решению.
Теперь все готово к запуску градиентного спуска.
1
2
3
4
5
6
7
8
9
10
hyp.BGD(x, y)
J = hyp.error(x, y)
print("error after gradient descent:", J)
error after gradient descent: 6734.135540194945
X0 = np.linspace(60, 180, 100)
Y0 = hyp.predict(X0)
plt.figure()
plt.scatter(x, y)
plt.plot(X0, Y0, 'r')
plt.show()
Как мы видим, численное значение ошибки значительно уменьшилось. Да и линия на графике существенно приблизилась к точкам. Конечно, наша модель еще далека от совершенства. Мы прошли всего лишь одну итерацию градиентного спуска. Модифицируем метод так, чтобы он запускался в цикле пока ошибка не перестанет меняться существенно:
1
2
3
4
5
6
7
8
9
10
11
12
13
def BGD(self, X, Y, alpha=0.5, accuracy=0.01, max_steps=5000):
step = 0
old_err = hyp.error(X, Y)
new_err = hyp.error(X, Y)
dJ = 1
while (dJ > accuracy) and (step < max_steps):
dJ0 = sum(self.predict(X) - Y) /len(X)
dJ1 = sum((self.predict(X) - Y) * X) /len(X)
self.b0 -= alpha * dJ0
self.b1 -= alpha * dJ1
old_err = new_err
new_err = hyp.error(X, Y)
dJ = abs(old_err - new_err)
Заодно мы проверяем, насколько изменилось значение функции ошибки. Если оно изменилось на величину, меньшую, чем заранее заданная точность, мы завершаем спуск. Таким образом, мы реализовали два стоп-механизма — по количеству итераций и по стабилизации ошибки. Вы можете выбрать любой или использовать оба в связке.
Запустим наш градиентный спуск:
1
2
3
4
5
hyp = hypothesis()
hyp.BGD(x, y)
J = hyp.error(x, y)
print("error after gradient descent:", J)
error after gradient descent: 298.76881676471504
Как мы видим, теперь ошибка снизилась гораздо больше. Однако, она все еще не достигла нуля. Заметим, что нулевая ошибка не всегда возможна в принципе из-за того, что точки данных не всегда будут располагаться на одной линии. Нужно стремиться не к нулевой, а к минимально возможной ошибке.
Посмотрим, как теперь наша регрессия выглядит на графике:
1
2
3
4
5
6
X0 = np.linspace(60, 180, 100)
Y0 = hyp.predict(X0)
plt.figure()
plt.scatter(x, y)
plt.plot(X0, Y0, 'r')
plt.show()

Уже значительно лучше. Линия регрессии довольно похожа на оптимальную. Так ли это на самом деле, глядя на график, сказать сложно, для этого нужно проанализировать, как ошибка регрессии менялась со временем:
Как оценить качество регрессионной модели?
В простых случаях качество модели можно оценить визуально на графике. Но если у вас многомерная задача, это уже не представляется возможным. Кроме того, если ошибка и сама модель меняется незначительно, то очень сложно определить, стало хуже или лучше. Поэтому для диагностики моделей машинного обучения используют кривые.
Самая простая кривая обучения — зависимость ошибки от времени (итерации градиентного спуска). Для того, чтобы построить эту кривую, нам нужно немного модифицировать наш метод обучения так, чтобы он возвращал нужную нам информацию:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
def BGD(self, X, Y, alpha=0.1, accuracy=0.01, max_steps=1000):
steps, errors = [], []
step = 0
old_err = hyp.error(X, Y)
new_err = hyp.error(X, Y) - 1
dJ = 1
while (dJ > accuracy) and (step < max_steps):
dJ0 = sum(self.predict(X) - Y) /len(X)
dJ1 = sum((self.predict(X) - Y) * X) /len(X)
self.b0 -= alpha * dJ0
self.b1 -= alpha * dJ1
old_err = new_err
new_err = hyp.error(X, Y)
dJ = abs(old_err - new_err)
step += 1
steps.append(step)
errors.append(new_err)
return steps, errors
Мы просто запоминаем в массивах на номер шаа и ошибку на каждом шаге. Получив эти данные можно легко построить их на графике:
1
2
3
4
5
6
hyp = hypothesis()
steps, errors = hyp.BGD(x, y)
plt.figure()
plt.plot(steps, errors, 'g')
plt.show()

На этом графике наглядно видно, что в начале обучения ошибка падала быстро, но в ходе градиентного спуска она вышла на плато. Учитывая, что мы используем гладкую функцию ошибки второго порядка, это свидетельствует о том, что мы достигли локального оптимума и дальнейшее повторение алгоритма не принесет улучшения модели.
Если бы мы наблюдали на графике обучения ситуацию, когда по достижении конца обучения ошибка все еще заметно снижалась, это значит, что мы рано прекратили обучение, и нужно продолжить его еще на какое-то количество итераций.
При анализе графиков с библиотечными моделями не получится таких гладких графиков, они больше напоминают случайные колебания. Это из-за того, что в готовых реализациях используется очень оптимизированный вариант метода градиентного спуска. А он может работать с произвольными флуктуациями. В любом случае, нас интересует общий вид этой кривой.
Как подбирать скорость обучения?
В нашей реализации метода градиентного спуска есть один параметр — скорость обучения — который нам приходится так же подбирать руками. Какой смысл автоматизировать подбор параметров линейной регрессии, если все равно приходится вручную подбирать какой-то другой параметр?
На самом деле подобрать скорость обучения гораздо легче. Нужно использовать тот факт, что при превышении определенного порогового значения ошибка начинает возрастать. Кроме того, мы знаем, что скорость обучения должна быть положительна, но меньше единицы. Вся проблема в этом пороговом значении, которое сильно зависит от размерности задачи. При одних данных хорошо работает $ alpha = 0.5 $, а при каких-то приходится уменьшать ее на несколько порядков, например, $ alpha = 0.00000001 $.
Мы еще не говорили о нормализации данных, которая тоже практически всегда применяется при обучении. Она “благотворно” влияет на возможный диапазон значений скорости обучения. При использовании нормализации меньше вероятность, что скорость обучения нужно будет уменьшать очень сильно.
Подбирать скорость обучения можно по следующему алгоритму. Сначала мы выбираем $ alpha $ близкое к 1, скажем, $ alpha = 0.7 $. Производим одну итерацию градиентного спуска и оцениваем, как изменилась ошибка. Если она уменьшилась, то ничего не надо менять, продолжаем спуск как обычно. Если же ошибка увеличилась, то скорость обучения нужно уменьшить. Например, раа в два. После чего мы повторяем первый шаг градиентного спуска. Таким образом мы не начинаем спуск, пока скорость обучения не снизится настолько, чтобы он начал сходиться.
Как применять регрессию с использованием scikit-learn?
Для серьезной работы, все-таки рекомендуется использовать готовые библиотечные решения. Они работаю гораздо быстрее, надежнее и гораздо проще, чем написанные самостоятельно. Мы будем использовать библиотеку scikit-learn для языка программирования Python как наш основной инструмент реализации простых моделей. Сегодня это одна их самых популярных библиотек для машинного обучения. Мы не будем повторять официальную документацию этой библиотеки, которая на редкость подробная и понятная. Наша задача — на примере этих инструментов понять, как работают и как применяются модели машинного обучения.
В библиотеке scikit-learn существует огромное количество моделей машинного обучения и других функций, которые могут понадобиться для их работы. Поэтому внутри самой библиотеки есть много разных пакетов. Все простые модели, например, модель линейной регрессии, собраны в пакете linear_models. Подключить его можно так:
1
from sklearn import linear_model
Надо помнить, что все модели машинного обучения из это библиотеки имеют одинаковый интерфейс. Это очень удобно и универсально. Но это значит, в частности, что все модели предполагают, что массив входных переменных — двумерный, а массивы целевых переменных — одномерный. Отдельного класса для парной регрессии не существует. Поэтому надо убедиться, что наш массив имеет нужную форму. Проще всего для преобразования формы массива использовать метод reshape, например, вот так:
Если вы используете DataFrame, то они обычно всегда настроены правильно, поэтому этого шага может не потребоваться. Важно запомнить, что все методы библиотечных моделей машинного обучения предполагают, что в x будет двумерный массив или DataFrame, а в y, соответственно, одномерный массив или Series.
Эта строка преобразует любой массив в вектор-столбец. Это если у вас один признак, то есть парная регрессия. Если признаков несколько, то вместо 1 следует указать число признаков. -1 на первой позиции означает, что по нулевому измерению будет столько элементов, сколько останется в массиве.
Само использование модели машинного обучения в этой библиотеке очень просто и сводится к трем действиям: создание экземпляра модели, обучение модели методом fit(), получение предсказаний методом predict(). Это общее поведение для любых моделей библиотеки. Для модели парной линейной регрессии нам понадобится класс LinearRegression.
1
2
3
4
5
6
reg = linear_model.LinearRegression()
reg.fit(x, y)
y_pred = reg.predict(x)
print(reg.score(x, y))
print("Коэффициенты: n", reg.coef_)
В этом классе кроме уже упомянутых методов fit() и predict(), которые есть в любой модели, есть большое количество методов и полей для получения дополнительной информации о моделях. Так, практически в каждой модели есть встроенный метод score(), который оценивает качество полученной модели. А поле coef_ содержит коэффициенты модели.
Обратите внимание, что в большинстве моделей коэффициентами считаются именно параметры при входящих переменных, то есть $ b_1, b_2, …, b_n $. Коэффициент $b_0$ считается особым и хранится отдельно в поле intercept_
Так как мы работаем с парной линейной регрессией, результат можно нарисовать на графике:
1
2
3
4
plt.figure(figsize=(12, 9))
plt.scatter(x, y, color="black")
plt.plot(x, y_pred, color="blue", linewidth=3)
plt.show()
Как мы видим, результат ничем не отличается от модели, которую мы обучили сами, вручную:

Соберем код вместе и получим пример довольно реалистичного фрагмента работы с моделью машинного обучение. Примерно такой код можно встретить и в промышленных проектах по интеллектуальному анализу данных:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
from sklearn.linear_model import LinearRegression
x = x.reshape((-1, 1))
reg = LinearRegression()
reg.fit(x, y)
print(reg.score(x, y))
from sklearn.metrics import mean_squared_error, r2_score
y_pred = reg.predict(x)
print("Коэффициенты: n", reg.coef_)
print("Среднеквадратичная ошибка: %.2f" % mean_squared_error(y, y_pred))
print("Коэффициент детерминации: %.2f" % r2_score(y, y_pred))
plt.figure(figsize=(12, 9))
plt.scatter(x, y, color="black")
plt.plot(x, y_pred, color="blue", linewidth=3)
plt.show()