ОШИБКИ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
— в общем случае это функционалы, характеризующие отклонение показателя качества работы (Ф) системы автоматического управления (САУ) от его заданного или экстремального значения  Показатель качества определяется
Показатель качества определяется  -эконом. требованиями к САУ и может представлять либо совокупность заданных (требуемых) значений регулируемых величин системы, напр., в системах автомат, регулирования (САР), либо некоторую функцию от этих величин (напр., в системах экстремального регулирования или в самонастраивающихся системах). В качестве меры отклонения обычно принимают разность
-эконом. требованиями к САУ и может представлять либо совокупность заданных (требуемых) значений регулируемых величин системы, напр., в системах автомат, регулирования (САР), либо некоторую функцию от этих величин (напр., в системах экстремального регулирования или в самонастраивающихся системах). В качестве меры отклонения обычно принимают разность  , причем величины, входящие в это выражение, в общем случае векторные. О. в с. а. у. зависят от процесса управления, т. е. являются ф-цией времени
, причем величины, входящие в это выражение, в общем случае векторные. О. в с. а. у. зависят от процесса управления, т. е. являются ф-цией времени  Эта зависимость определяет два вида ошибок: динамические (при
Эта зависимость определяет два вида ошибок: динамические (при  и установившиеся
и установившиеся  Динамические О. в
Динамические О. в
с. а. у. могут оцениваться по значениям, взятым в определенные моменты времени (напр., максимум ошибки в процессе управления), либо по интегральным критериям (напр., среднеквадратичная ошибка  , где Т — период наблюдения).
, где Т — период наблюдения).
О. в с. а. у. зависят прежде всего от структуры систем, а также от возмущений, действующих на объект управления, от ограниченности управляющего воздействия по величине и мощности, погрешностей в измерительных цепях и т. п. В связи с этим в линейных САУ выделяют вынужденную составляющую ошибки, определяемую действием возмущения на объект управления или задания, и свободную составляющую, определяемую начальным отклонением показателя качества работы САУ. Кроме того, рассматривают О. в с. а. у., связанные с действием случайных сигналов на объект управления и соответствующие оценки этих ошибок (например, математическое ожидание и дисперсия). В следящих САР вынужденная составляющая ошибки определяется изменением задания во времени  . При этом помимо основной ошибки
. При этом помимо основной ошибки  разности задания и регулируемой величины, называемой также ошибкой по положению, различают и ее производные по времени 1, 2-го и более высоких порядков, называемые соответственно ошибками по скорости, по ускорению и т. д. Для линейных следящих САР, если задание меняется медленно по сравнению с изменениями импульсной переходной ф-ции системы, вынужденная составляющая ошибки может быть представлена как линейная функция от задания и его производных по времени:
разности задания и регулируемой величины, называемой также ошибкой по положению, различают и ее производные по времени 1, 2-го и более высоких порядков, называемые соответственно ошибками по скорости, по ускорению и т. д. Для линейных следящих САР, если задание меняется медленно по сравнению с изменениями импульсной переходной ф-ции системы, вынужденная составляющая ошибки может быть представлена как линейная функция от задания и его производных по времени:

где  — порядок той производной задания, которая имеет достаточно малую величину и изменением которой во времени можно пренебречь,
— порядок той производной задания, которая имеет достаточно малую величину и изменением которой во времени можно пренебречь,  коэффициенты ошибок, определяемые как
коэффициенты ошибок, определяемые как

где  передаточная функция системы по ошибке. Пользуясь формулами (1) и (2), можно по передаточной ф-ции систем, по ошибке и по виду зависимости
передаточная функция системы по ошибке. Пользуясь формулами (1) и (2), можно по передаточной ф-ции систем, по ошибке и по виду зависимости  определить характер изменения вынужденной составляющей ошибки. Например, в случае задания
определить характер изменения вынужденной составляющей ошибки. Например, в случае задания  и системы с астатизмом 1-го порядка (один нулевой корень передаточной ф-ции) получают
и системы с астатизмом 1-го порядка (один нулевой корень передаточной ф-ции) получают  т. е. вынужденная составляющая ошибки равна нулю.
т. е. вынужденная составляющая ошибки равна нулю.
С помощью методов автоматического управления теории структура САУ может быть выбрана таким образом, чтобы минимизировать О. в с. а. у. при принятой ее оценке или минимизировать некоторый показатель, связанный с изменением ошибки во времени (напр., время переходного процесса). Путем рационального выбора структуры некоторые виды ошибок САУ могут быть сведены к нулю, напр., установившиеся ошибки в САР при интегральном регулирования законе или динамические ошибки, связанные с действием возмущений на объект управления в некоторых случаях инвариантных систем управления. См. также Астатизм  -го порядка, Инвариантность систем автоматического управления.
-го порядка, Инвариантность систем автоматического управления.
Лит.: Современные методы проектирования систем автоматического управления. М., 1967; Ивахненко А. Г. Электроавтоматика. К., 1957 [библиогр. с. 440—442]; Воронов А. А. Основы теории автоматического управления, ч. 1. М. Л., 1965 [библиогр. с. 382—392]. Л. М. Бойчук.
-
Виды ошибок регулирования и методы их снижения.
Прямые показатели качества подразделяются
на показатели качества динамического
и установившегося режимов.
Показателями качества динамических
режимов определяются из графика
переходного процесса и основными из
них являются (рис.1.42):
—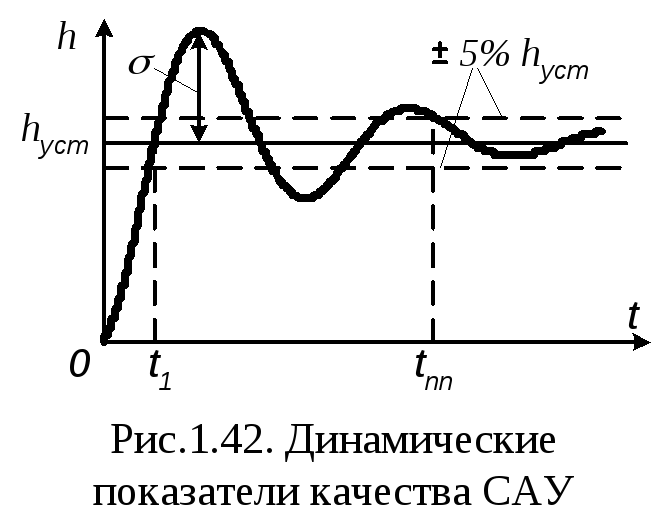 перерегулирование или забросσ,
перерегулирование или забросσ,
равный максимуму отклонения значения
переходного процесса относительно
установившегося значения процессаhycm;
— время первой установки t1,
определяемое моментом первого пересечения
графиком переходного процесса
установившегося значенияhycm;
— время переходного процесса tПП,
определяемое момент окончательного
входа графика переходного процесса в
зону допуска, равную±5%от
установившегося значения процессаhycm.
Для всех названных динамических
показателей качества невозможно в общем
случае получить формулы для их расчета.
Это является существенным препятствием
для решения задач анализа и синтеза
САУ.
Показателями качества установившихся
режимов являются ошибки регулирования,
равные абсолютной величине разности
между заданным и фактическим значениями
сигналов САУ и которые в зависимости
от вида входного сигнала САУ подразделяются
на статические (εСТ) и
скоростные ошибки (εСК) и
ошибки (εm)
при отработке гармонического входного
сигнала.
Д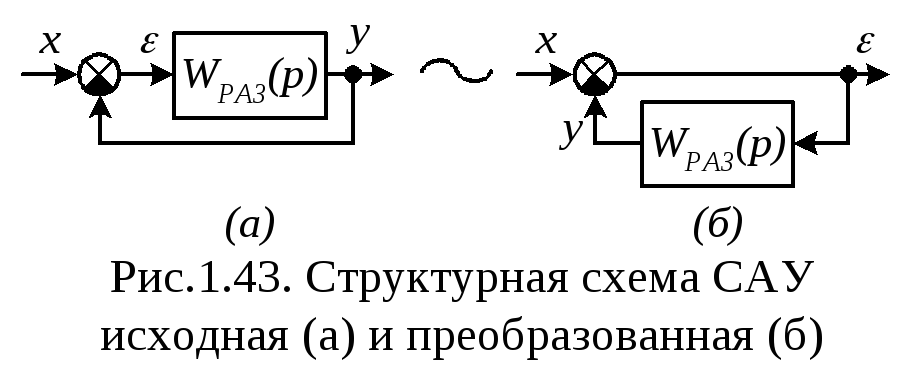 ля
ля
всех названных ошибок регулирования
можно в общем случае получить формулы
их расчета.
Из структурной схемы замкнутой САУ
(рис.1.43) следуют выражения передаточной
функции САУ Wε(p)по ошибке и изображенияε(р)ошибки
регулирования:
![]()
Расчет ошибки εmотработки гармонического входного
сигналаx=Xmsinωt
производится по формуле
![]()
где
![]() — модуль комплексного числа
— модуль комплексного числа![]() .
.
Статическая (εСТ) и
скоростная (εСК) ошибки
равны установившимся значениям оригинала![]() и
и![]() ,
,
или в общем виде, по формуле![]() .
.
Значение![]() вычисляют через изображениеε(р)
вычисляют через изображениеε(р)
по доказываемой в теории операционного
исчисления формуле предельного перехода,
![]() (1.54)
(1.54)
Выражение передаточной функции
разомкнутой САУ в общем случае может
быть приведено к виду:
 (1.55)
(1.55)
где К– общий коэффициент усиления
разомкнутой САУ:
ν— порядок астатизма САУ, причемνявляется целым неотрицательным
числом.
Для удобства вычислений по формуле
(1.54) подставим в нее выражение WРАЗ(р)из (1.55) и выполним предельный переход:
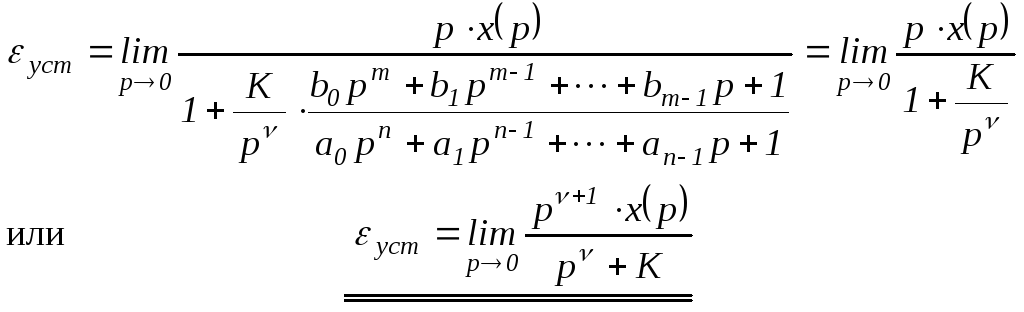 (1.56)
(1.56)
Статическая ошибка регулирования εСТрассчитывается при постоянном входном
сигналеx(t)=X=const,
а скоростнаяεСК— при
входном сигналеx=Vt,
изменяющемуся во времени с постоянной
скоростьюV=const.
Далее расчеты статической (εСТ)
и скоростной (εСК) ошибок
выполним раздельно.
Расчеты статической ошибки εСт регулирования
Входной сигнал x(t)=X=constи изображением его является![]() .
.
В соответствии с (1.56) статическую ошибкуεСТследует вычислять по
формуле
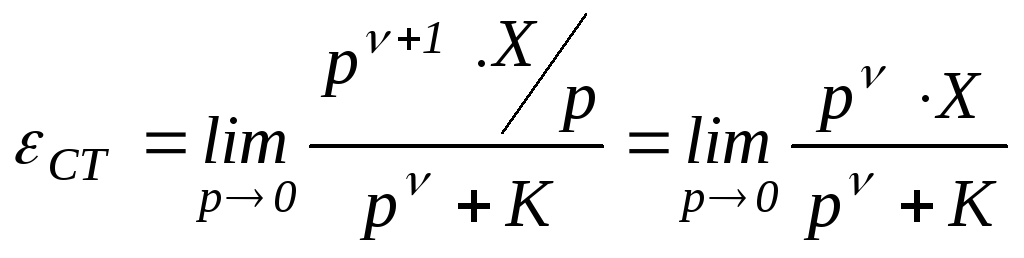 (1.57)
(1.57)
1). Пусть в (1.57) значение порядка νастатизма САУ равно нулю:ν=0. Такая
САУ называется статической. Тогда
статическая ошибкаεСТбудет равна
![]()
В статической САУ имеется статическая
ошибка εСТ, которую можно
только уменьшить путем увеличения
общего коэффициента усиленияКразомкнутой САУ, но обратить в ноль ее
нельзя.
2). Пусть в (1.57) значение порядка νастатизма САУ равно 1:ν=1. Такая САУ
называется астатической 1-го порядка.
Тогда статическая ошибкаεСТбудет равна
![]()
В астатической САУ 1-го порядка статическая
ошибка εСТравна нулю,
т.е САУ является абсолютно точной. Можно
проверить, что при астатизме САУ выше1, статическая ошибка регулирования
всегда будет нулевой.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Качество управления. Ошибка системы. Система автоматической стабилизации скорости вращения электродвигателя
Страницы работы
Фрагмент текста работы
6 Качество управления
Ошибка системы
Любая автоматическая система должна быть не
только устойчивой, но и достаточно точной в работе. В любой реальной системе
невозможно точное равенство задающего воздействия g
и управляемой величины y во всё время процесса управления. Возникает
ошибка системы x=g—y. Её можно представить в виде X=Xп+Хуст.,
где Xп – переходная ошибка, а Хуст. – это ошибка
системы по окончанию переходного процесса. Для определения Xп приходится
либо находить корни характеристического уравнения, либо использовать критерии
качества, не требующие нахождения ошибки Xп (частотный критерий качества, интегральный
критерий качества).
6.2 Ошибки САУ в установившемся режиме
Рассмотрим неподвижное состояние, когда g=const ,или f=const. Имеются 2 вида систем: статические и
астатические. Статической системой автоматического управления называется
система, переходная функция которой в разомкнутом состоянии при размыкании по
ошибке имеет вид: 
В статических САУ интегрирующие звенья или отсутствуют.
или охвачены обратной связью, т.е. нет множителя p
в знаменателе.
 |
Определим ошибку Хуст., если g=g0, f=f0,
тогда Хуст.=g0—yуст. (а),
Но yуст.=Х2уст.К2
= (Х1уст.+f0)К2= (Хуст.К1+f0)K2
(в).
Подставим (в) в (а): Хуст.= g0-К1К2
Хуст.-К2f0. Хуст.(1+K1K2)= g0—K2f0.
Пусть К1К2=К, тогда Хуст.=
(g0/1+К)-( К2f0/1+К).
Из выражения (в) следует, что для
уменьшения ошибки от задающего воздействия g
необходимо увеличивать общий коэффициент передачи звеньев, стоящих до
возмущения (К1) и уменьшать для стоящих после возмущения(K2). В
статических САУ ошибку от задающего воздействия легко ликвидировать
масштабированием. Этот метод рассмотрим позднее. Исследуем ошибку от
возмущающего воздействия.
Пример: Система автоматической стабилизации скорости вращения
электродвигателя.
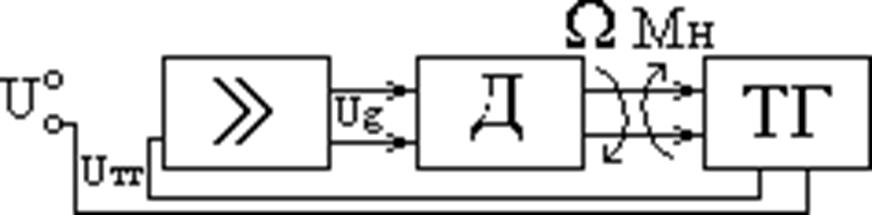
Мн – момент нагрузки.
При изменении Мн меняется скорость вращения
ω, что приводит к изменению Uтг (напряжения, вырабатываемого тахогенератором). При
правильном выборе знака обратной связи скорость вращения будет меняться
значительно меньше, чем при отсутствии обратной связи. Покажем, что в системе
будет установившаяся ошибка. При изменении момента нагрузки Мн
изменится и момент двигателя, потому что в установившемся режиме Mдв = Мн.
Mдв меняется при изменении ω или Uдвиг., но Uдвиг. (Uд) при постоянном U может измениться
лишь при изменении Uтг, т.е. Uд = U— Uтг. Поэтому при изменении Мн обязательно
меняется ω, т.е. появляется ошибка.
6.3 Оценка динамических
свойств САУ по переходной характеристике
1) Качество оценивается по перерегулированию
σ %= (ym-yуст.)/ yуст.·100%
.
σ %= |10-50|%.
 2) Быстродействие можно оценивать как время
2) Быстродействие можно оценивать как время
переходного процесса от момента подачи скачка до момента tп, начиная с
которого для всех t ≥ tп: |y(t)- yуст. | ≤ Δyуст., Δyуст.=1-5%.
6.4 Корневые оценки
динамических свойств САУ
О динамических свойствах САУ можно судить по
расположению полюсов и нулей замкнутой системы управления.
 1-й вариант: имеется один вещественный полюс.
1-й вариант: имеется один вещественный полюс.
 ;
;  =>
=>  .
.
Чем меньше Т, тем быстрее растёт сигнал на выходе.
 При приближении полюса к мнимой оси
При приближении полюса к мнимой оси
быстродействие уменьшается.
2-й вариант: два комплексно сопряжённых полюса.


 ;
;  .
.
Можно показать, что![]() . Перерегулирование зависит от
. Перерегулирование зависит от
параметра  —
—
этот параметр называется колебательностью. При равном удалении полюсов
от мнимой оси σ % больше в той системе, в которой полюсы дальше отстоят от
вещественной оси. Увеличение μ приводит к возрастанию перерегулирования, чтобы
колебательность системы не превышала заданной величины, полюса должны быть
расположены внутри области, в которой tgφ=μ.
 Если еще имеется и отрицательный нуль
Если еще имеется и отрицательный нуль
(корень числителя) – это эквивалентно действию дифференцирующего звена и
колебательность возрастает с приближением нуля к мнимой оси. Добавление
вещественного полюса уменьшает перерегулирование и увеличивает время
переходного процесса. Если имеется несколько полюсов и нулей, но они достаточно
удалены от мнимой оси, то их влиянием можно пренебречь.
Улучшение качества
правления
Способы уменьшения ошибки
Общими методами уменьшения ошибки
(повышения точности) САР являются:
1.
Увеличение
коэффициента усиления K
разомкнутой цепи
2.
Повышение порядка
астатизма r
3.
Применение
регулирования по производным
4.
Включение
масштабирующих устройств на входе или выходе
6.5.1.1 Повышение
точности систем увеличением коэффициента усиления
Метод эффективен, широко применяется, но обычно
увеличение K приводит к
уменьшению запаса устойчивости
Повышение точности
систем увеличением порядка астатизма
Астатическими называются системы, переходная функция которых в
разомкнутом виде имеет вид:  . Степень r
. Степень r
называется порядком астатизма.
В астатической системе обязательно имеются
интегрирующие звенья.
Кu/p– интегрирующее звено.

Рассмотрим установившееся состояние системы при g=g0, f1=f10, f2=f20. После
окончания переходного процесса y=yуст. Это может быть только если Х2=0,
иначе интегратор вырабатывал бы возрастающий сигнал Х3. Х2=К1Хуст.+
f10=0. Найдём отсюда Хуст.=- f10/ К1.
В выражение не входит f2 и К2.
Ошибка астатической системы в режиме неподвижного состояния зависит лишь от
возмущающего воздействия, приложенного до интегрирующего звена. Поэтому
надо создавать системы в которых возмущение приложено после интегрирующего
звена, тогда ошибка равна нулю.
 |
Статическую систему ,не имеющую интегрирующих звеньев,
будем называть
Похожие материалы
- Компенсация инерционности САУ. Методы повышения качества САУ с помощью программы МВТУ
- Самонастраивающиеся САУ. Виды самонастраивающихся САУ. Самонастраивающиеся системы с моделью
- Устойчивость линейных САУ. Основные понятия устойчивости. Решение линейного дифференциального уравнения для переходного процесса
Информация о работе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
Качество управления. Ошибка системы. Система автоматической стабилизации скорости вращения электродвигателя
Страницы работы
Фрагмент текста работы
6 Качество управления
Ошибка системы
Любая автоматическая система должна быть не
только устойчивой, но и достаточно точной в работе. В любой реальной системе
невозможно точное равенство задающего воздействия g
и управляемой величины y во всё время процесса управления. Возникает
ошибка системы x=g—y. Её можно представить в виде X=Xп+Хуст.,
где Xп – переходная ошибка, а Хуст. – это ошибка
системы по окончанию переходного процесса. Для определения Xп приходится
либо находить корни характеристического уравнения, либо использовать критерии
качества, не требующие нахождения ошибки Xп (частотный критерий качества, интегральный
критерий качества).
6.2 Ошибки САУ в установившемся режиме
Рассмотрим неподвижное состояние, когда g=const ,или f=const. Имеются 2 вида систем: статические и
астатические. Статической системой автоматического управления называется
система, переходная функция которой в разомкнутом состоянии при размыкании по
ошибке имеет вид:
В статических САУ интегрирующие звенья или отсутствуют.
или охвачены обратной связью, т.е. нет множителя p
в знаменателе.
|
Определим ошибку Хуст., если g=g0, f=f0,
тогда Хуст.=g0—yуст. (а),
Но yуст.=Х2уст.К2
= (Х1уст.+f0)К2= (Хуст.К1+f0)K2
(в).
Подставим (в) в (а): Хуст.= g0-К1К2
Хуст.-К2f0. Хуст.(1+K1K2)= g0—K2f0.
Пусть К1К2=К, тогда Хуст.=
(g0/1+К)-( К2f0/1+К).
Из выражения (в) следует, что для
уменьшения ошибки от задающего воздействия g
необходимо увеличивать общий коэффициент передачи звеньев, стоящих до
возмущения (К1) и уменьшать для стоящих после возмущения(K2). В
статических САУ ошибку от задающего воздействия легко ликвидировать
масштабированием. Этот метод рассмотрим позднее. Исследуем ошибку от
возмущающего воздействия.
Пример: Система автоматической стабилизации скорости вращения
электродвигателя.
Мн – момент нагрузки.
При изменении Мн меняется скорость вращения
ω, что приводит к изменению Uтг (напряжения, вырабатываемого тахогенератором). При
правильном выборе знака обратной связи скорость вращения будет меняться
значительно меньше, чем при отсутствии обратной связи. Покажем, что в системе
будет установившаяся ошибка. При изменении момента нагрузки Мн
изменится и момент двигателя, потому что в установившемся режиме Mдв = Мн.
Mдв меняется при изменении ω или Uдвиг., но Uдвиг. (Uд) при постоянном U может измениться
лишь при изменении Uтг, т.е. Uд = U— Uтг. Поэтому при изменении Мн обязательно
меняется ω, т.е. появляется ошибка.
6.3 Оценка динамических
свойств САУ по переходной характеристике
1) Качество оценивается по перерегулированию
σ %= (ym-yуст.)/ yуст.·100%
.
σ %= |10-50|%.
2) Быстродействие можно оценивать как время
переходного процесса от момента подачи скачка до момента tп, начиная с
которого для всех t ≥ tп: |y(t)- yуст. | ≤ Δyуст., Δyуст.=1-5%.
6.4 Корневые оценки
динамических свойств САУ
О динамических свойствах САУ можно судить по
расположению полюсов и нулей замкнутой системы управления.
1-й вариант: имеется один вещественный полюс.
; => .
Чем меньше Т, тем быстрее растёт сигнал на выходе.
При приближении полюса к мнимой оси
быстродействие уменьшается.
2-й вариант: два комплексно сопряжённых полюса.
; .
Можно показать, что![]() . Перерегулирование зависит от
. Перерегулирование зависит от
параметра —
этот параметр называется колебательностью. При равном удалении полюсов
от мнимой оси σ % больше в той системе, в которой полюсы дальше отстоят от
вещественной оси. Увеличение μ приводит к возрастанию перерегулирования, чтобы
колебательность системы не превышала заданной величины, полюса должны быть
расположены внутри области, в которой tgφ=μ.
Если еще имеется и отрицательный нуль
(корень числителя) – это эквивалентно действию дифференцирующего звена и
колебательность возрастает с приближением нуля к мнимой оси. Добавление
вещественного полюса уменьшает перерегулирование и увеличивает время
переходного процесса. Если имеется несколько полюсов и нулей, но они достаточно
удалены от мнимой оси, то их влиянием можно пренебречь.
Улучшение качества
правления
Способы уменьшения ошибки
Общими методами уменьшения ошибки
(повышения точности) САР являются:
1.
Увеличение
коэффициента усиления K
разомкнутой цепи
2.
Повышение порядка
астатизма r
3.
Применение
регулирования по производным
4.
Включение
масштабирующих устройств на входе или выходе
6.5.1.1 Повышение
точности систем увеличением коэффициента усиления
Метод эффективен, широко применяется, но обычно
увеличение K приводит к
уменьшению запаса устойчивости
Повышение точности
систем увеличением порядка астатизма
Астатическими называются системы, переходная функция которых в
разомкнутом виде имеет вид: . Степень r
называется порядком астатизма.
В астатической системе обязательно имеются
интегрирующие звенья.
Кu/p– интегрирующее звено.
Рассмотрим установившееся состояние системы при g=g0, f1=f10, f2=f20. После
окончания переходного процесса y=yуст. Это может быть только если Х2=0,
иначе интегратор вырабатывал бы возрастающий сигнал Х3. Х2=К1Хуст.+
f10=0. Найдём отсюда Хуст.=- f10/ К1.
В выражение не входит f2 и К2.
Ошибка астатической системы в режиме неподвижного состояния зависит лишь от
возмущающего воздействия, приложенного до интегрирующего звена. Поэтому
надо создавать системы в которых возмущение приложено после интегрирующего
звена, тогда ошибка равна нулю.
|
Статическую систему ,не имеющую интегрирующих звеньев,
будем называть
Похожие материалы
- Компенсация инерционности САУ. Методы повышения качества САУ с помощью программы МВТУ
- Самонастраивающиеся САУ. Виды самонастраивающихся САУ. Самонастраивающиеся системы с моделью
- Устойчивость линейных САУ. Основные понятия устойчивости. Решение линейного дифференциального уравнения для переходного процесса
Информация о работе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
Главная
»
Самолетостроение
»
Основы теории управления
»
Основные понятия и общие принципы построения автоматических систем. Дать определения и пояснить термины система автоматического управления (САУ), разомкнутые и замнкнутые САУ, сигнал ошибки (рассогласования).
Основные понятия и общие принципы построения автоматических систем. Дать определения и пояснить термины система автоматического управления (САУ), разомкнутые и замнкнутые САУ, сигнал ошибки (рассогласования).
Теория автоматического управления— это дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Основные понятия:
-Автоматика
-Управление
-Цель
-Объекты:
-Система автоматического управления.
-Устройство
-Объект управления
-Регулирование
-Регулятор
-Задающее воздействие g(t)
-Ошибка регулирования ε(t) = g(t) — y(t),
-Возмущающее воздействие f(t)
САУ- система состоящая из объекта управления и устройства управления, в которой автоматически выполняется заданный процесс.
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Примеры таких систем : таймер, блок управления светофора, автоматическая система полива газона, автоматическая стиральная машина и т. п.
В свою очередь различают:
Разомкнутые по задающему воздействию
Разомкнутые по возмущающему воздействию
Замкнутые САУ
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь входа системы с его выходом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
Сигнал ошибки ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим её значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
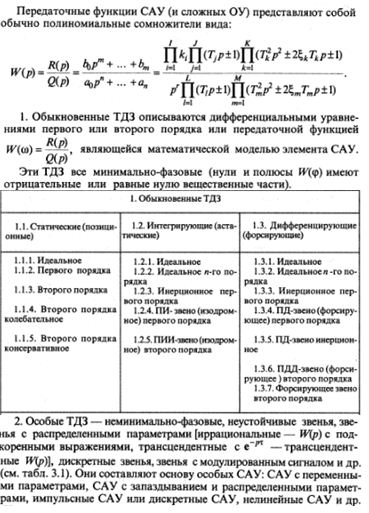
2. Классификация динамических звеньев САУ. Обыкновенные и типовые динамические звенья (ДТЗ) САУ.
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.