Время на прочтение
14 мин
Количество просмотров 83K
Привет. Я хочу продолжить тему реализации методов машинного обучения на c#, и в этой статье я расскажу про алгоритм обратного распространения ошибки для обучения нейронной сети прямого распространения, а также приведу его реализацию на языке C#. Особенность данной реализации в том, что реализация алгоритма абстрагирована от реализаций целевой функции (той, которую нейросеть пытается минимизировать) и функции активации нейронов. В итоге получится некий конструктор, с помощью которого можно поиграться с различными параметрами сети и алгоритма обучения, посмотреть и сравнить результат. Предполагается, что вы уже знакомы с тем, что такое искусственная нейросеть (если нет, то настоятельно рекомендую для начала изучить википедию или одну из подобных статей). Интересно? Лезем под кат.
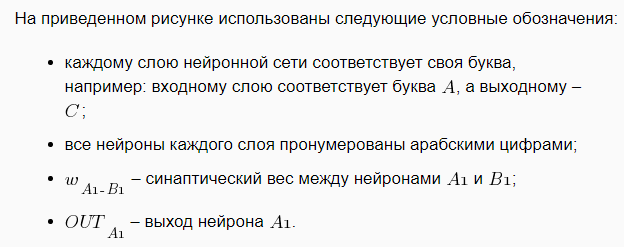
Обозначения
Для начала рассмотрим обозначения, которые я буду использовать в статье, а за одно вспомним основные понятия, я не буду приводить картинок с нейронами и слоями, этого всего полно в википедии и здесь, на хабре. Итак, сразу в бой, индуцированное локальное поле нейрона (или просто сумматор) выглядит следующим образом:
Функция активации нейрона, или передаточная функция от значения сумматора:
- у каждого нейрона сети может быть своя функция активации
- для всех слоев кроме первого, входным вектором будет являться выходной вектор предыдущего слоя, так что
От нейрона перейдем к самой сети. Нейросеть — это модель, она обладает параметрами, и задача алгоритма обучения заключается в подборе таких параметров сети, чтобы минимизоровать значение функции ошибки. Функцию ошибки будем обозначать через E. Параметрами модели являются веса нейронов:  — вес j-ого нейрона слоя n, который берет свое начало в i-ом нейроне слоя (n — 1).
— вес j-ого нейрона слоя n, который берет свое начало в i-ом нейроне слоя (n — 1).
Греческой эта  обозначим гиперпараметр алгоритма обучения — скорость обучения.
обозначим гиперпараметр алгоритма обучения — скорость обучения.
Изменение веса обозначим через дельта:

- направление градиента показывает нам в сторону роста значения функции, но нам для минимизации необходимо двигаться в обратном направлении
Таким образом, новый вес нейрона выглядит следующим образом: 
Стоит упомянуть, что к изменению веса еще можно (или, скорее, нужно) добавить регуляризацию. Функция регуляризации R — это функция от параметров модели, в нашем случае это веса нейронов. Таким образом, новая функция ошибки выглядит как E + R, а формула изменения веса преобразуется в следующую:
- лямбда — гиперпараметр обучения, коэффициент регуляризации (похож на скорость обучения)
- m — размер обучающей выборки
Вообще говоря, реализацию регуляризации тоже можно абстрагировать от алгоритма обучения, но я пока этого делать не буду, поскольку текущая реализация алгоритма обучения и так не самая быстрая, поскольку в противному случае на каждой эпохе обучения (прогон всех обучающих примеров) придется в одном цикле считать аккумулированную ошибку, а в другом — регуляризацию.Еще одна причина заключается в том, что существует не так много видов регуляризации (я, например, знаю только L1 и L2), которые применяются при обучении нейросетей. В данной реализации я буду использовать L2 норму, и она будет неотъемлемой частью алгоритма обучения.
Алгоритм обратного распространения ошибки
Для начала остановимся на режимах обучения. Изменять веса можно несколькими способами:
- либо после каждого обучающего примера (обучение в реальном режиме времени, online обучение, batchSize = 1)
- либо накопить изменения для всей обучающей выборки, а затем изменить все веса (full-batch, batchSize = trainingSet.Length)
- либо после прогона некоторого количества обучающих примеров (mini-batch, batchSize = any_number < trainingSet.Length)
Рассмотрим ситуацию с онлайн-обучением, так будет проще. Итак, на вход сети пришел импульс  , сеть выдала отклик
, сеть выдала отклик  , хотя правильной реакцией на x, является
, хотя правильной реакцией на x, является  .
.
Рассмотрим частную производную функции ошибки E:
Дальнейшее рассуждение разделяется на две ветки: для последнего слоя и для остальных слоев.
Выходной слой
Для выходного слоя все просто, для коррекции ошибки нам достаточно вычислить производную целевой функции по одному из весов и вычислить значение дельты. Учтем, что целевая функция полностью зависит только от выходного значения нейрона, или значения функции активации, а сама функция активации зависит только от сумматора

Тут видно, что для вычисления ошибки выходного слоя нужно вычислить значение частных производных в точках, независимо от того, какая у нас целевая функция или же функция активации нейрона.
Любой скрытый слой
Но если слой не выходной, то нам нужно аккумулировать значения ошибок всех последующих слоев.
PS: я заметил, что в верхних индексах забыл ставить скобки, чтобы обозначить, что это не степень, а индекс слоя; учтите это, пока степеней нигде не было.
Что же мы имеем:
- вычисление производной некой функции активации — это как раз то что нужно
- вычисление частной производной целевой функции по значению сумматора следующего слоя; тут тоже все просто, мы ведь находимся не на последнем слое, и вычисление изменений весов ведем от последнего к первому, так что это значение уже вычислено на предыдущем шаге
- в случае, если следующий слой последний, то мы вычислим это значение для текущего слоя, и таким образом распространим решение на всю сеть
Реализация
Функция ошибки
С формулами покончили, давайте перейдем к реализации, и начнем с понятия функции ошибки. У меня это представлено в виде метрики (по сути, это так и есть). Метод CalculatePartialDerivaitveByV2Index вычисляет значение частной производной функции для входных векторов по индексу переменное из v2.
public interface IMetrics<T>
{
double Calculate(T[] v1, T[] v2);
/// <summary>
/// Calculate value of partial derivative by v2[v2Index]
/// </summary>
T CalculatePartialDerivaitveByV2Index(T[] v1, T[] v2, int v2Index);
}
Таким образом, мы можем вычислить значение частной производной функции ошибки для последнего слоя по реальному выходу сети  .
.
Для примера давайте напишем несколько реализаций.
Минимизация половины квадрата Евклидова расстояния
А производная будет выглядеть следующим образом:

internal class HalfSquaredEuclidianDistance : IMetrics<T>
{
public override double Calculate(double[] v1, double[] v2)
{
double d = 0;
for (int i = 0; i < v1.Length; i++)
{
d += (v1[i] - v2[i]) * (v1[i] - v2[i]);
}
return 0.5 * d;
}
public override double CalculatePartialDerivaitveByV2Index(double[] v1, double[] v2, int v2Index)
{
return v2[v2Index] - v1[v2Index];
}
}
Минимизация логарифмического правдоподобия

internal class Loglikelihood : IMetrics<double>
{
public override double Calculate(double[] v1, double[] v2)
{
double d = 0;
for (int i = 0; i < v1.Length; i++)
{
d += v1[i]*Math.Log(v2[i]) + (1 - v1[i])*Math.Log(1 - v2[i]);
}
return -d;
}
public override double CalculatePartialDerivaitveByV2Index(double[] v1, double[] v2, int v2Index)
{
return -(v1[v2Index]/v2[v2Index] - (1 - v1[v2Index])/(1 - v2[v2Index]));
}
}
Здесь главное не забыть, что логарифмическое правдоподобие вычисляется со знаком минус в начале, и производная тоже будет с минусом. Я не заостряю внимания на проверках или избегания случаев деления на ноль, или логарифма от нуля.
Функция активации нейрона
Аналогичным способом опишем функцию активации нейрона.
public interface IFunction
{
double Compute(double x);
double ComputeFirstDerivative(double x);
}
И примеры.
Сигмоид

internal class SigmoidFunction : IFunction
{
private double _alpha = 1;
internal SigmoidFunction(double alpha)
{
_alpha = alpha;
}
public double Compute(double x)
{
double r = (1 / (1 + Math.Exp(-1 * _alpha * x)));
//return r == 1f ? 0.9999999f : r;
return r;
}
public double ComputeFirstDerivative(double x)
{
return _alpha * this.Compute(x) * (1 - this.Compute(x));
}
}
Гиперболический тангенс


internal class HyperbolicTangensFunction : IFunction
{
private double _alpha = 1;
internal HyperbolicTangensFunction(double alpha)
{
_alpha = alpha;
}
public double Compute(double x)
{
return (Math.Tanh(_alpha * x));
}
public double ComputeFirstDerivative(double x)
{
double t = Math.Tanh(_alpha*x);
return _alpha*(1 - t*t);
}
}
Нейрон, слой и сеть
В данном разделе рассмотрим представление основных элементов сети, реализацию их я приводить не буду, т.к. она очевидно. Алгоритм будет приведен для полносвязной «слоеной» сети, так что и реализацию сети нужно будет делать соответствующую.
Итак, нейрон выглядит следующим образом.
public interface INeuron
{
/// <summary>
/// Weights of the neuron
/// </summary>
double[] Weights { get; }
/// <summary>
/// Offset/bias of neuron (default is 0)
/// </summary>
double Bias { get; set; }
/// <summary>
/// Compute NET of the neuron by input vector
/// </summary>
/// <param name="inputVector">Input vector (must be the same dimension as was set in SetDimension)</param>
/// <returns>NET of neuron</returns>
double NET(double[] inputVector);
/// <summary>
/// Compute state of neuron
/// </summary>
/// <param name="inputVector">Input vector (must be the same dimension as was set in SetDimension)</param>
/// <returns>State of neuron</returns>
double Activate(double[] inputVector);
/// <summary>
/// Last calculated state in Activate
/// </summary>
double LastState { get; set; }
/// <summary>
/// Last calculated NET in NET
/// </summary>
double LastNET { get; set; }
IList<INeuron> Childs { get; }
IList<INeuron> Parents { get; }
IFunction ActivationFunction { get; set; }
double dEdz { get; set; }
}
Т.к. мы рассматриваем полносвязную «слоеную» сеть, то Childs и Parents можно не имплементировать, но если делать общий алгоритм, то придется. Рассмотрим поля, которые особо важны для алгоритма обучения:
- LastNET — сумматор нейрона, тут хранится последнее вычисленное значение
- LastState — выход нейрона, тут хранится последнее вычисленное значение
- dEdz — это то самое dE/dz нейрона, что упоминается выше, и вычисляется в зависимости от того на каком слое находится текущий нейрон; частная производная функции ошибки по сумматору нейрона
Слой сети выглядит проще:
public interface ILayer
{
/// <summary>
/// Compute output of the layer
/// </summary>
/// <param name="inputVector">Input vector</param>
/// <returns>Output vector</returns>
double[] Compute(double[] inputVector);
/// <summary>
/// Get last output of the layer
/// </summary>
double[] LastOutput { get; }
/// <summary>
/// Get neurons of the layer
/// </summary>
INeuron[] Neurons { get; }
/// <summary>
/// Get input dimension of neurons
/// </summary>
int InputDimension { get; }
}
И представление сети:
public interface INeuralNetwork
{
/// <summary>
/// Compute output vector by input vector
/// </summary>
/// <param name="inputVector">Input vector (double[])</param>
/// <returns>Output vector (double[])</returns>
double[] ComputeOutput(double[] inputVector);
Stream Save();
/// <summary>
/// Train network with given inputs and outputs
/// </summary>
/// <param name="inputs">Set of input vectors</param>
/// <param name="outputs">Set if output vectors</param>
void Train(IList<DataItem<double>> data);
}
Но мы рассматриваем многослойную нейросеть, так что будет использоваться особое представление:
public interface IMultilayerNeuralNetwork : INeuralNetwork
{
/// <summary>
/// Get array of layers of network
/// </summary>
ILayer[] Layers { get; }
}
Алгоритм обучения
Алгоритм обучения будет реализован через паттерн стратегия:
public interface ILearningStrategy<T>
{
/// <summary>
/// Train neural network
/// </summary>
/// <param name="network">Neural network for training</param>
/// <param name="inputs">Set of input vectors</param>
/// <param name="outputs">Set of output vectors</param>
void Train(T network, IList<DataItem<double>> data);
}
Для более наглядного понимания приведу типичную функцию Train любой нейросети в контексте данной реализации:
public void Train(IList<DataItem<double>> data)
{
_learningStrategy.Train(this, data);
}
Формат входных данных
Я использую следующий формат входных данных:
public class DataItem<T>
{
private T[] _input = null;
private T[] _output = null;
public DataItem()
{
}
public DataItem(T[] input, T[] output)
{
_input = input;
_output = output;
}
public T[] Input
{
get { return _input; }
set { _input = value; }
}
public T[] Output
{
get { return _output; }
set { _output = value; }
}
}
Как видно из кода в предыдущих частях, нейросеть работает с
DataItem.Параметры алгоритма обучения
Данным классом описываются параметры алгоритма обучения, я думаю названия полей говорят сами за себя (и комментарии), так что не буду дублировать текстом:
public class LearningAlgorithmConfig
{
public double LearningRate { get; set; }
/// <summary>
/// Size of the butch. -1 means fullbutch size.
/// </summary>
public int BatchSize { get; set; }
public double RegularizationFactor { get; set; }
public int MaxEpoches { get; set; }
/// <summary>
/// If cumulative error for all training examples is less then MinError, then algorithm stops
/// </summary>
public double MinError { get; set; }
/// <summary>
/// If cumulative error change for all training examples is less then MinErrorChange, then algorithm stops
/// </summary>
public double MinErrorChange { get; set; }
/// <summary>
/// Function to minimize
/// </summary>
public IMetrics<double> ErrorFunction { get; set; }
}
Алгоритм
Ну и наконец, показав весь контекст, можно перейти к собственно реализации алгоритма обучения нейросети
internal class BackpropagationFCNLearningAlgorithm : ILearningStrategy, функция public void Train(IMultilayerNeuralNetwork network, IList<DataItem> data).
Для начала подготавливаем некоторые переменные (общие для всех эпох обучения) для работы алгоритма:
if (_config.BatchSize < 1 || _config.BatchSize > data.Count)
{
_config.BatchSize = data.Count;
}
double currentError = Single.MaxValue;
double lastError = 0;
int epochNumber = 0;
Logger.Instance.Log("Start learning...");
Затем запустится основной цикл работы алгоритма, в котором происходит прямой и обратный прогон всего массива данных, один прогон называется эпохой:
do
{
//...
} while (epochNumber < _config.MaxEpoches &&
currentError > _config.MinError &&
Math.Abs(currentError - lastError) > _config.MinErrorChange);
Заходим в цикл, и перед тем как пройтись по всем примерам, инициализируем вспомогательные переменные важные только для текущей эпохи. В случае, если batch не полный, то перемешиваем данные.
lastError = currentError;
DateTime dtStart = DateTime.Now;
//preparation for epoche
int[] trainingIndices = new int[data.Count];
for (int i = 0; i < data.Count; i++)
{
trainingIndices[i] = i;
}
if (_config.BatchSize > 0)
{
trainingIndices = Shuffle(trainingIndices);
}
Далее наступает процесс обработки данных, в зависимости от размера пачки, и изменение весов, это выглядит так:
//process data set
int currentIndex = 0;
do
{
#region initialize accumulated error for batch, for weights and biases
double[][][] nablaWeights = new double[network.Layers.Length][][];
double[][] nablaBiases = new double[network.Layers.Length][];
for (int i = 0; i < network.Layers.Length; i++)
{
nablaBiases[i] = new double[network.Layers[i].Neurons.Length];
nablaWeights[i] = new double[network.Layers[i].Neurons.Length][];
for (int j = 0; j < network.Layers[i].Neurons.Length; j++)
{
nablaBiases[i][j] = 0;
nablaWeights[i][j] = new double[network.Layers[i].Neurons[j].Weights.Length];
for (int k = 0; k < network.Layers[i].Neurons[j].Weights.Length; k++)
{
nablaWeights[i][j][k] = 0;
}
}
}
#endregion
//process one batch
for (int inBatchIndex = currentIndex; inBatchIndex < currentIndex + _config.BatchSize && inBatchIndex < data.Count; inBatchIndex++)
{
//forward pass
double[] realOutput = network.ComputeOutput(data[trainingIndices[inBatchIndex]].Input);
//backward pass, error propagation
//last layer
//.......................................ОБРАБОТКА ПОСЛЕДНЕГО СЛОЯ
//hidden layers
//.......................................ОБРАБОТКА СКРЫТЫХ СЛОЕВ
}
//update weights and bias
for (int layerIndex = 0; layerIndex < network.Layers.Length; layerIndex++)
{
for (int neuronIndex = 0; neuronIndex < network.Layers[layerIndex].Neurons.Length; neuronIndex++)
{
network.Layers[layerIndex].Neurons[neuronIndex].Bias -= nablaBiases[layerIndex][neuronIndex];
for (int weightIndex = 0; weightIndex < network.Layers[layerIndex].Neurons[neuronIndex].Weights.Length; weightIndex++)
{
network.Layers[layerIndex].Neurons[neuronIndex].Weights[weightIndex] -=
nablaWeights[layerIndex][neuronIndex][weightIndex];
}
}
}
currentIndex += _config.BatchSize;
} while (currentIndex < data.Count);
Рассмотрим обработку последнего слоя:
- инициализировали "наблЫ", там мы храним аккумулированное значение градиента для пачки входных данных (при онлайн обучении, там окажется просто градиент по одному примеру)
- пробегаемся по всем нейронам последнего слоя
- вычисляем dE/dz
- а затем вычисляем значение градиента для весов и смещения
//last layer
for (int j = 0; j < network.Layers[network.Layers.Length - 1].Neurons.Length; j++)
{
network.Layers[network.Layers.Length - 1].Neurons[j].dEdz =
_config.ErrorFunction.CalculatePartialDerivaitveByV2Index(data[inBatchIndex].Output,
realOutput, j) *
network.Layers[network.Layers.Length - 1].Neurons[j].ActivationFunction.
ComputeFirstDerivative(network.Layers[network.Layers.Length - 1].Neurons[j].LastNET);
nablaBiases[network.Layers.Length - 1][j] += _config.LearningRate *
network.Layers[network.Layers.Length - 1].Neurons[j].dEdz;
for (int i = 0; i < network.Layers[network.Layers.Length - 1].Neurons[j].Weights.Length; i++)
{
nablaWeights[network.Layers.Length - 1][j][i] +=
_config.LearningRate*(network.Layers[network.Layers.Length - 1].Neurons[j].dEdz*
(network.Layers.Length > 1 ?
network.Layers[network.Layers.Length - 1 - 1].Neurons[i].LastState :
data[inBatchIndex].Input[i])
+
_config.RegularizationFactor *
network.Layers[network.Layers.Length - 1].Neurons[j].Weights[i]
/ data.Count);
}
}
Очень похоже на последний слой выглядит обработка всех скрытых слоев сети:
- пробегаемся по всем скрытым слоям
- инициализировали "наблЫ", там мы храним аккумулированное значение градиента для пачки входных данных (при онлайн обучении, там окажется просто градиент по одному примеру)
- пробегаемся по всем нейронам последнего слоя
- вычисляем dE/dz, но уже для этого мы используем значения вычисленные, на слое старше текущего
- а затем вычисляем значение градиента для весов и смещения
//hidden layers
for (int hiddenLayerIndex = network.Layers.Length - 2; hiddenLayerIndex >= 0; hiddenLayerIndex--)
{
for (int j = 0; j < network.Layers[hiddenLayerIndex].Neurons.Length; j++)
{
network.Layers[hiddenLayerIndex].Neurons[j].dEdz = 0;
for (int k = 0; k < network.Layers[hiddenLayerIndex + 1].Neurons.Length; k++)
{
network.Layers[hiddenLayerIndex].Neurons[j].dEdz +=
network.Layers[hiddenLayerIndex + 1].Neurons[k].Weights[j]*
network.Layers[hiddenLayerIndex + 1].Neurons[k].dEdz;
}
network.Layers[hiddenLayerIndex].Neurons[j].dEdz *=
network.Layers[hiddenLayerIndex].Neurons[j].ActivationFunction.
ComputeFirstDerivative(
network.Layers[hiddenLayerIndex].Neurons[j].LastNET
);
nablaBiases[hiddenLayerIndex][j] += _config.LearningRate*
network.Layers[hiddenLayerIndex].Neurons[j].dEdz;
for (int i = 0; i < network.Layers[hiddenLayerIndex].Neurons[j].Weights.Length; i++)
{
nablaWeights[hiddenLayerIndex][j][i] += _config.LearningRate * (
network.Layers[hiddenLayerIndex].Neurons[j].dEdz *
(hiddenLayerIndex > 0 ? network.Layers[hiddenLayerIndex - 1].Neurons[i].LastState : data[inBatchIndex].Input[i])
+
_config.RegularizationFactor * network.Layers[hiddenLayerIndex].Neurons[j].Weights[i] / data.Count
);
}
}
}
Тут основной код заканчивается, и остается сделать пару штрихов в виде вычисления средней ошибки сети на массиве данных (с учетом регуляризации), и логирование:
//recalculating error on all data
//real error
currentError = 0;
for (int i = 0; i < data.Count; i++)
{
double[] realOutput = network.ComputeOutput(data[i].Input);
currentError += _config.ErrorFunction.Calculate(data[i].Output, realOutput);
}
currentError *= 1d/data.Count;
//regularization term
if (Math.Abs(_config.RegularizationFactor - 0d) > Double.Epsilon)
{
double reg = 0;
for (int layerIndex = 0; layerIndex < network.Layers.Length; layerIndex++)
{
for (int neuronIndex = 0; neuronIndex < network.Layers[layerIndex].Neurons.Length; neuronIndex++)
{
for (int weightIndex = 0; weightIndex < network.Layers[layerIndex].Neurons[neuronIndex].Weights.Length; weightIndex++)
{
reg += network.Layers[layerIndex].Neurons[neuronIndex].Weights[weightIndex] *
network.Layers[layerIndex].Neurons[neuronIndex].Weights[weightIndex];
}
}
}
currentError += _config.RegularizationFactor * reg / (2 * data.Count);
}
epochNumber++;
Logger.Instance.Log("Eposh #" + epochNumber.ToString() +
" finished; current error is " + currentError.ToString() +
"; it takes: " +
(DateTime.Now - dtStart).Duration().ToString());
Этот блок находится прямиком перед выходом из основного цикла, продублирую код для наглядности:
} while (epochNumber < _config.MaxEpoches &&
currentError > _config.MinError &&
Math.Abs(currentError - lastError) > _config.MinErrorChange);
Итог
Собственно все. От себя хочу вот что добавить, данный текст я привел примерно в том виде, в каком я его хотел бы видеть, когда первый раз читал про алгоритм обратного распространения. Обычно в литературе авторы заранее говорят что будет использоваться такая то функция ошибки и активации нейрона. И в процессе вывода формул с частными производными они вставляют эти производные в вывод, и в итоге получается примерно так же, как, например, в википедии, где рассматривается алгоритм для минимизации квадрата Евклидова расстояния.
Вот формула для последнего слоя:

и для остальных:
 .
.
Конечно, если вы очень умны, то вам не составит труда понять что тут от какого дифференциала, но я смог понять это только когда взял в руки ручку и бумагу, и написал весь вывод. Потом то же самое сделал для другой функции ошибки и только потом обобщил и осознал -)
Нейронные сети обучаются с помощью тех или иных модификаций градиентного спуска, а чтобы применять его, нужно уметь эффективно вычислять градиенты функции потерь по всем обучающим параметрам. Казалось бы, для какого-нибудь запутанного вычислительного графа это может быть очень сложной задачей, но на помощь спешит метод обратного распространения ошибки.
Открытие метода обратного распространения ошибки стало одним из наиболее значимых событий в области искусственного интеллекта. В актуальном виде он был предложен в 1986 году Дэвидом Э. Румельхартом, Джеффри Э. Хинтоном и Рональдом Дж. Вильямсом и независимо и одновременно красноярскими математиками С. И. Барцевым и В. А. Охониным. С тех пор для нахождения градиентов параметров нейронной сети используется метод вычисления производной сложной функции, и оценка градиентов параметров сети стала хоть сложной инженерной задачей, но уже не искусством. Несмотря на простоту используемого математического аппарата, появление этого метода привело к значительному скачку в развитии искусственных нейронных сетей.
Суть метода можно записать одной формулой, тривиально следующей из формулы производной сложной функции: если $f(x) = g_m(g_{m-1}(ldots (g_1(x)) ldots))$, то $frac{partial f}{partial x} = frac{partial g_m}{partial g_{m-1}}frac{partial g_{m-1}}{partial g_{m-2}}ldots frac{partial g_2}{partial g_1}frac{partial g_1}{partial x}$. Уже сейчас мы видим, что градиенты можно вычислять последовательно, в ходе одного обратного прохода, начиная с $frac{partial g_m}{partial g_{m-1}}$ и умножая каждый раз на частные производные предыдущего слоя.
Backpropagation в одномерном случае
В одномерном случае всё выглядит особенно просто. Пусть $w_0$ — переменная, по которой мы хотим продифференцировать, причём сложная функция имеет вид
$$f(w_0) = g_m(g_{m-1}(ldots g_1(w_0)ldots)),$$
где все $g_i$ скалярные. Тогда
$$f'(w_0) = g_m'(g_{m-1}(ldots g_1(w_0)ldots))cdot g’_{m-1}(g_{m-2}(ldots g_1(w_0)ldots))cdotldots cdot g’_1(w_0)$$
Суть этой формулы такова. Если мы уже совершили forward pass, то есть уже знаем
$$g_1(w_0), g_2(g_1(w_0)),ldots,g_{m-1}(ldots g_1(w_0)ldots),$$
то мы действуем следующим образом:
-
берём производную $g_m$ в точке $g_{m-1}(ldots g_1(w_0)ldots)$;
-
умножаем на производную $g_{m-1}$ в точке $g_{m-2}(ldots g_1(w_0)ldots)$;
-
и так далее, пока не дойдём до производной $g_1$ в точке $w_0$.
Проиллюстрируем это на картинке, расписав по шагам дифференцирование по весам $w_i$ функции потерь логистической регрессии на одном объекте (то есть для батча размера 1):

Собирая все множители вместе, получаем:
$$frac{partial f}{partial w_0} = (-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
$$frac{partial f}{partial w_1} = x_1cdot(-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
$$frac{partial f}{partial w_2} = x_2cdot(-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
Таким образом, мы видим, что сперва совершается forward pass для вычисления всех промежуточных значений (и да, все промежуточные представления нужно будет хранить в памяти), а потом запускается backward pass, на котором в один проход вычисляются все градиенты.
Почему же нельзя просто пойти и начать везде вычислять производные?
В главе, посвящённой матричным дифференцированиям, мы поднимаем вопрос о том, что вычислять частные производные по отдельности — это зло, лучше пользоваться матричными вычислениями. Но есть и ещё одна причина: даже и с матричной производной в принципе не всегда хочется иметь дело. Рассмотрим простой пример. Допустим, что $X^r$ и $X^{r+1}$ — два последовательных промежуточных представления $Ntimes M$ и $Ntimes K$, связанных функцией $X^{r+1} = f^{r+1}(X^r)$. Предположим, что мы как-то посчитали производную $frac{partialmathcal{L}}{partial X^{r+1}_{ij}}$ функции потерь $mathcal{L}$, тогда
$$frac{partialmathcal{L}}{partial X^{r}_{st}} = sum_{i,j}frac{partial f^{r+1}_{ij}}{partial X^{r}_{st}}frac{partialmathcal{L}}{partial X^{r+1}_{ij}}$$
И мы видим, что, хотя оба градиента $frac{partialmathcal{L}}{partial X_{ij}^{r+1}}$ и $frac{partialmathcal{L}}{partial X_{st}^{r}}$ являются просто матрицами, в ходе вычислений возникает «четырёхмерный кубик» $frac{partial f_{ij}^{r+1}}{partial X_{st}^{r}}$, даже хранить который весьма болезненно: уж больно много памяти он требует ($N^2MK$ по сравнению с безобидными $NM + NK$, требуемыми для хранения градиентов). Поэтому хочется промежуточные производные $frac{partial f^{r+1}}{partial X^{r}}$ рассматривать не как вычисляемые объекты $frac{partial f_{ij}^{r+1}}{partial X_{st}^{r}}$, а как преобразования, которые превращают $frac{partialmathcal{L}}{partial X_{ij}^{r+1}}$ в $frac{partialmathcal{L}}{partial X_{st}^{r}}$. Целью следующих глав будет именно это: понять, как преобразуется градиент в ходе error backpropagation при переходе через тот или иной слой.
Вы спросите себя: надо ли мне сейчас пойти и прочитать главу учебника про матричное дифференцирование?
Встречный вопрос. Найдите производную функции по вектору $x$:
$$f(x) = x^TAx, Ain Mat_{n}{mathbb{R}}text{ — матрица размера }ntimes n$$
А как всё поменяется, если $A$ тоже зависит от $x$? Чему равен градиент функции, если $A$ является скаляром? Если вы готовы прямо сейчас взять ручку и бумагу и посчитать всё, то вам, вероятно, не надо читать про матричные дифференцирования. Но мы советуем всё-таки заглянуть в эту главу, если обозначения, которые мы будем дальше использовать, покажутся вам непонятными: единой нотации для матричных дифференцирований человечество пока, увы, не изобрело, и переводить с одной на другую не всегда легко.
Мы же сразу перейдём к интересующей нас вещи: к вычислению градиентов сложных функций.
Градиент сложной функции
Напомним, что формула производной сложной функции выглядит следующим образом:
$$left[D_{x_0} (color{#5002A7}{u} circ color{#4CB9C0}{v}) right](h) = color{#5002A7}{left[D_{v(x_0)} u right]} left( color{#4CB9C0}{left[D_{x_0} vright]} (h)right)$$
Теперь разберёмся с градиентами. Пусть $f(x) = g(h(x))$ – скалярная функция. Тогда
$$left[D_{x_0} f right] (x-x_0) = langlenabla_{x_0} f, x-x_0rangle.$$
С другой стороны,
$$left[D_{h(x_0)} g right] left(left[D_{x_0}h right] (x-x_0)right) = langlenabla_{h_{x_0}} g, left[D_{x_0} hright] (x-x_0)rangle = langleleft[D_{x_0} hright]^* nabla_{h(x_0)} g, x-x_0rangle.$$
То есть $color{#FFC100}{nabla_{x_0} f} = color{#348FEA}{left[D_{x_0} h right]}^* color{#FFC100}{nabla_{h(x_0)}}g$ — применение сопряжённого к $D_{x_0} h$ линейного отображения к вектору $nabla_{h(x_0)} g$.
Эта формула — сердце механизма обратного распространения ошибки. Она говорит следующее: если мы каким-то образом получили градиент функции потерь по переменным из некоторого промежуточного представления $X^k$ нейронной сети и при этом знаем, как преобразуется градиент при проходе через слой $f^k$ между $X^{k-1}$ и $X^k$ (то есть как выглядит сопряжённое к дифференциалу слоя между ними отображение), то мы сразу же находим градиент и по переменным из $X^{k-1}$:

Таким образом слой за слоем мы посчитаем градиенты по всем $X^i$ вплоть до самых первых слоёв.
Далее мы разберёмся, как именно преобразуются градиенты при переходе через некоторые распространённые слои.
Градиенты для типичных слоёв
Рассмотрим несколько важных примеров.
Примеры
-
$f(x) = u(v(x))$, где $x$ — вектор, а $v(x)$ – поэлементное применение $v$:
$$vbegin{pmatrix}
x_1 \
vdots\
x_N
end{pmatrix}
= begin{pmatrix}
v(x_1)\
vdots\
v(x_N)
end{pmatrix}$$Тогда, как мы знаем,
$$left[D_{x_0} fright] (h) = langlenabla_{x_0} f, hrangle = left[nabla_{x_0} fright]^T h.$$
Следовательно,
$$
left[D_{v(x_0)} uright] left( left[ D_{x_0} vright] (h)right) = left[nabla_{v(x_0)} uright]^T left(v'(x_0) odot hright) =\
$$$$
= sumlimits_i left[nabla_{v(x_0)} uright]_i v'(x_{0i})h_i
= langleleft[nabla_{v(x_0)} uright] odot v'(x_0), hrangle.
,$$где $odot$ означает поэлементное перемножение. Окончательно получаем
$$color{#348FEA}{nabla_{x_0} f = left[nabla_{v(x_0)}uright] odot v'(x_0) = v'(x_0) odot left[nabla_{v(x_0)} uright]}$$
Отметим, что если $x$ и $h(x)$ — это просто векторы, то мы могли бы вычислять всё и по формуле $frac{partial f}{partial x_i} = sum_jbig(frac{partial z_j}{partial x_i}big)cdotbig(frac{partial h}{partial z_j}big)$. В этом случае матрица $big(frac{partial z_j}{partial x_i}big)$ была бы диагональной (так как $z_j$ зависит только от $x_j$: ведь $h$ берётся поэлементно), и матричное умножение приводило бы к тому же результату. Однако если $x$ и $h(x)$ — матрицы, то $big(frac{partial z_j}{partial x_i}big)$ представлялась бы уже «четырёхмерным кубиком», и работать с ним было бы ужасно неудобно.
-
$f(X) = g(XW)$, где $X$ и $W$ — матрицы. Как мы знаем,
$$left[D_{X_0} f right] (X-X_0) = text{tr}, left(left[nabla_{X_0} fright]^T (X-X_0)right).$$
Тогда
$$
left[ D_{X_0W} g right] left(left[D_{X_0} left( ast Wright)right] (H)right) =
left[ D_{X_0W} g right] left(HWright)=\
$$ $$
= text{tr}, left( left[nabla_{X_0W} g right]^T cdot (H) W right) =\
$$ $$
=
text{tr} , left(W left[nabla_{X_0W} (g) right]^T cdot (H)right) = text{tr} , left( left[left[nabla_{X_0W} gright] W^Tright]^T (H)right)
$$Здесь через $ast W$ мы обозначили отображение $Y hookrightarrow YW$, а в предпоследнем переходе использовалось следующее свойство следа:
$$
text{tr} , (A B C) = text{tr} , (C A B),
$$где $A, B, C$ — произвольные матрицы подходящих размеров (то есть допускающие перемножение в обоих приведённых порядках). Следовательно, получаем
$$color{#348FEA}{nabla_{X_0} f = left[nabla_{X_0W} (g) right] cdot W^T}$$
-
$f(W) = g(XW)$, где $W$ и $X$ — матрицы. Для приращения $H = W — W_0$ имеем
$$
left[D_{W_0} f right] (H) = text{tr} , left( left[nabla_{W_0} f right]^T (H)right)
$$Тогда
$$
left[D_{XW_0} g right] left( left[D_{W_0} left(X astright) right] (H)right) = left[D_{XW_0} g right] left( XH right) =
$$ $$
= text{tr} , left( left[nabla_{XW_0} g right]^T cdot X (H)right) =
text{tr}, left(left[X^T left[nabla_{XW_0} g right] right]^T (H)right)
$$Здесь через $X ast$ обозначено отображение $Y hookrightarrow XY$. Значит,
$$color{#348FEA}{nabla_{X_0} f = X^T cdot left[nabla_{XW_0} (g)right]}$$
-
$f(X) = g(softmax(X))$, где $X$ — матрица $Ntimes K$, а $softmax$ — функция, которая вычисляется построчно, причём для каждой строки $x$
$$softmax(x) = left(frac{e^{x_1}}{sum_te^{x_t}},ldots,frac{e^{x_K}}{sum_te^{x_t}}right)$$
В этом примере нам будет удобно воспользоваться формализмом с частными производными. Сначала вычислим $frac{partial s_l}{partial x_j}$ для одной строки $x$, где через $s_l$ мы для краткости обозначим $softmax(x)_l = frac{e^{x_l}} {sum_te^{x_t}}$. Нетрудно проверить, что
$$frac{partial s_l}{partial x_j} = begin{cases}
s_j(1 — s_j), & j = l,
-s_ls_j, & jne l
end{cases}$$Так как softmax вычисляется независимо от каждой строчки, то
$$frac{partial s_{rl}}{partial x_{ij}} = begin{cases}
s_{ij}(1 — s_{ij}), & r=i, j = l,
-s_{il}s_{ij}, & r = i, jne l,
0, & rne i
end{cases},$$где через $s_{rl}$ мы обозначили для краткости $softmax(X)_{rl}$.
Теперь пусть $nabla_{rl} = nabla g = frac{partialmathcal{L}}{partial s_{rl}}$ (пришедший со следующего слоя, уже известный градиент). Тогда
$$frac{partialmathcal{L}}{partial x_{ij}} = sum_{r,l}frac{partial s_{rl}}{partial x_{ij}} nabla_{rl}$$
Так как $frac{partial s_{rl}}{partial x_{ij}} = 0$ при $rne i$, мы можем убрать суммирование по $r$:
$$ldots = sum_{l}frac{partial s_{il}}{partial x_{ij}} nabla_{il} = -s_{i1}s_{ij}nabla_{i1} — ldots + s_{ij}(1 — s_{ij})nabla_{ij}-ldots — s_{iK}s_{ij}nabla_{iK} =$$
$$= -s_{ij}sum_t s_{it}nabla_{it} + s_{ij}nabla_{ij}$$
Таким образом, если мы хотим продифференцировать $f$ в какой-то конкретной точке $X_0$, то, смешивая математические обозначения с нотацией Python, мы можем записать:
$$begin{multline*}
color{#348FEA}{nabla_{X_0}f =}\
color{#348FEA}{= -softmax(X_0) odot text{sum}left(
softmax(X_0)odotnabla_{softmax(X_0)}g, text{ axis = 1}
right) +}\
color{#348FEA}{softmax(X_0)odot nabla_{softmax(X_0)}g}
end{multline*}
$$
Backpropagation в общем виде
Подытожим предыдущее обсуждение, описав алгоритм error backpropagation (алгоритм обратного распространения ошибки). Допустим, у нас есть текущие значения весов $W^i_0$ и мы хотим совершить шаг SGD по мини-батчу $X$. Мы должны сделать следующее:
- Совершить forward pass, вычислив и запомнив все промежуточные представления $X = X^0, X^1, ldots, X^m = widehat{y}$.
- Вычислить все градиенты с помощью backward pass.
- С помощью полученных градиентов совершить шаг SGD.
Проиллюстрируем алгоритм на примере двуслойной нейронной сети со скалярным output’ом. Для простоты опустим свободные члены в линейных слоях.
 Обучаемые параметры – матрицы $U$ и $W$. Как найти градиенты по ним в точке $U_0, W_0$?
Обучаемые параметры – матрицы $U$ и $W$. Как найти градиенты по ним в точке $U_0, W_0$?
$$nabla_{W_0}mathcal{L} = nabla_{W_0}{left({vphantom{frac12}mathcal{L}circ hcircleft[Wmapsto g(XU_0)Wright]}right)}=$$
$$=g(XU_0)^Tnabla_{g(XU_0)W_0}(mathcal{L}circ h) = underbrace{g(XU_0)^T}_{ktimes N}cdot
left[vphantom{frac12}underbrace{h’left(vphantom{int_0^1}g(XU_0)W_0right)}_{Ntimes 1}odot
underbrace{nabla_{hleft(vphantom{int_0^1}g(XU_0)W_0right)}mathcal{L}}_{Ntimes 1}right]$$
Итого матрица $ktimes 1$, как и $W_0$
$$nabla_{U_0}mathcal{L} = nabla_{U_0}left(vphantom{frac12}
mathcal{L}circ hcircleft[Ymapsto YW_0right]circ gcircleft[ Umapsto XUright]
right)=$$
$$=X^Tcdotnabla_{XU^0}left(vphantom{frac12}mathcal{L}circ hcirc [Ymapsto YW_0]circ gright) =$$
$$=X^Tcdotleft(vphantom{frac12}g'(XU_0)odot
nabla_{g(XU_0)}left[vphantom{in_0^1}mathcal{L}circ hcirc[Ymapsto YW_0right]
right)$$
$$=ldots = underset{Dtimes N}{X^T}cdotleft(vphantom{frac12}
underbrace{g'(XU_0)}_{Ntimes K}odot
underbrace{left[vphantom{int_0^1}left(
underbrace{h’left(vphantom{int_0^1}g(XU_0)W_0right)}_{Ntimes1}odotunderbrace{nabla_{h(vphantom{int_0^1}gleft(XU_0right)W_0)}mathcal{L}}_{Ntimes 1}
right)cdot underbrace{W^T}_{1times K}right]}_{Ntimes K}
right)$$
Итого $Dtimes K$, как и $U_0$
Схематически это можно представить следующим образом:

Backpropagation для двуслойной нейронной сети
Подробнее о предыдущих вычисленияхЕсли вы не уследили за вычислениями в предыдущем примере, давайте более подробно разберём его чуть более конкретную версию (для $g = h = sigma$).
Рассмотрим двуслойную нейронную сеть для классификации. Мы уже встречали ее ранее при рассмотрении линейно неразделимой выборки. Предсказания получаются следующим образом:
$$
widehat{y} = sigma(X^1 W^2) = sigmaBig(big(sigma(X^0 W^1 )big) W^2 Big).
$$
Пусть $W^1_0$ и $W^2_0$ — текущее приближение матриц весов. Мы хотим совершить шаг по градиенту функции потерь, и для этого мы должны вычислить её градиенты по $W^1$ и $W^2$ в точке $(W^1_0, W^2_0)$.
Прежде всего мы совершаем forward pass, в ходе которого мы должны запомнить все промежуточные представления: $X^1 = X^0 W^1_0$, $X^2 = sigma(X^0 W^1_0)$, $X^3 = sigma(X^0 W^1_0) W^2_0$, $X^4 = sigma(sigma(X^0 W^1_0) W^2_0) = widehat{y}$. Они понадобятся нам дальше.
Для полученных предсказаний вычисляется значение функции потерь:
$$
l = mathcal{L}(y, widehat{y}) = y log(widehat{y}) + (1-y) log(1-widehat{y}).
$$
Дальше мы шаг за шагом будем находить производные по переменным из всё более глубоких слоёв.
-
Градиент $mathcal{L}$ по предсказаниям имеет вид
$$
nabla_{widehat{y}}l = frac{y}{widehat{y}} — frac{1 — y}{1 — widehat{y}} = frac{y — widehat{y}}{widehat{y} (1 — widehat{y})},
$$где, напомним, $ widehat{y} = sigma(X^3) = sigmaBig(big(sigma(X^0 W^1_0 )big) W^2_0 Big)$ (обратите внимание на то, что $W^1_0$ и $W^2_0$ тут именно те, из которых мы делаем градиентный шаг).
-
Следующий слой — поэлементное взятие $sigma$. Как мы помним, при переходе через него градиент поэлементно умножается на производную $sigma$, в которую подставлено предыдущее промежуточное представление:
$$
nabla_{X^3}l = sigma'(X^3)odotnabla_{widehat{y}}l = sigma(X^3)left( 1 — sigma(X^3) right) odot frac{y — widehat{y}}{widehat{y} (1 — widehat{y})} =
$$$$
= sigma(X^3)left( 1 — sigma(X^3) right) odot frac{y — sigma(X^3)}{sigma(X^3) (1 — sigma(X^3))} =
y — sigma(X^3)
$$ -
Следующий слой — умножение на $W^2_0$. В этот момент мы найдём градиент как по $W^2$, так и по $X^2$. При переходе через умножение на матрицу градиент, как мы помним, умножается с той же стороны на транспонированную матрицу, а значит:
$$
color{blue}{nabla_{W^2_0}l} = (X^2)^Tcdot nabla_{X^3}l = (X^2)^Tcdot(y — sigma(X^3)) =
$$$$
= color{blue}{left( sigma(X^0W^1_0) right)^T cdot (y — sigma(sigma(X^0W^1_0)W^2_0))}
$$Аналогичным образом
$$
nabla_{X^2}l = nabla_{X^3}lcdot (W^2_0)^T = (y — sigma(X^3))cdot (W^2_0)^T =
$$$$
= (y — sigma(X^2W_0^2))cdot (W^2_0)^T
$$ -
Следующий слой — снова взятие $sigma$.
$$
nabla_{X^1}l = sigma'(X^1)odotnabla_{X^2}l = sigma(X^1)left( 1 — sigma(X^1) right) odot left( (y — sigma(X^2W_0^2))cdot (W^2_0)^T right) =
$$$$
= sigma(X^1)left( 1 — sigma(X^1) right) odotleft( (y — sigma(sigma(X^1)W_0^2))cdot (W^2_0)^T right)
$$ -
Наконец, последний слой — это умножение $X^0$ на $W^1_0$. Тут мы дифференцируем только по $W^1$:
$$
color{blue}{nabla_{W^1_0}l} = (X^0)^Tcdot nabla_{X^1}l = (X^0)^Tcdot big( sigma(X^1) left( 1 — sigma(X^1) right) odot (y — sigma(sigma(X^1)W_0^2))cdot (W^2_0)^Tbig) =
$$$$
= color{blue}{(X^0)^Tcdotbig(sigma(X^0W^1_0)left( 1 — sigma(X^0W^1_0) right) odot (y — sigma(sigma(X^0W^1_0)W_0^2))cdot (W^2_0)^Tbig) }
$$
Итоговые формулы для градиентов получились страшноватыми, но они были получены друг из друга итеративно с помощью очень простых операций: матричного и поэлементного умножения, в которые порой подставлялись значения заранее вычисленных промежуточных представлений.
Автоматизация и autograd
Итак, чтобы нейросеть обучалась, достаточно для любого слоя $f^k: X^{k-1}mapsto X^k$ с параметрами $W^k$ уметь:
- превращать $nabla_{X^k_0}mathcal{L}$ в $nabla_{X^{k-1}_0}mathcal{L}$ (градиент по выходу в градиент по входу);
- считать градиент по его параметрам $nabla_{W^k_0}mathcal{L}$.
При этом слою совершенно не надо знать, что происходит вокруг. То есть слой действительно может быть запрограммирован как отдельная сущность, умеющая внутри себя делать forward pass и backward pass, после чего слои механически, как кубики в конструкторе, собираются в большую сеть, которая сможет работать как одно целое.
Более того, во многих случаях авторы библиотек для глубинного обучения уже о вас позаботились и создали средства для автоматического дифференцирования выражений (autograd). Поэтому, программируя нейросеть, вы почти всегда можете думать только о forward-проходе, прямом преобразовании данных, предоставив библиотеке дифференцировать всё самостоятельно. Это делает код нейросетей весьма понятным и выразительным (да, в реальности он тоже бывает большим и страшным, но сравните на досуге код какой-нибудь разухабистой нейросети и код градиентного бустинга на решающих деревьях и почувствуйте разницу).
Но это лишь начало
Метод обратного распространения ошибки позволяет удобно посчитать градиенты, но дальше с ними что-то надо делать, и старый добрый SGD едва ли справится с обучением современной сетки. Так что же делать? О некоторых приёмах мы расскажем в следующей главе.
Backpropagation
Содержание
- Постановка задачи
- Метод обратного распространения ошибки
- Вывод математических формул
- Программная реализация
-
- Инструкция по сборке программного кода и запуску приложения на данных базы MNIST
-
- Описание разработанного программного кода
- Эксперименты
Постановка задачи
Реализация метода обратного распространения ошибки для двухслойной полносвязной сети.
- Изучение общей схемы метода обратного распространения ошибки.
- Вывод математических формул для вычисления градиентов функции ошибки по параметрам нейронной сети и формул коррекции весов.
- Проектирование и разработка программной реализации.
- Тестирование разработанной программной реализации.
- Подготовка отчета, содержащего минимальный объем информации по каждому этапу
выполнения работы.
Метод обратного распространения ошибки
Метод обратного распространения ошибки определяет стратегию выбора параметров сети 𝑤 с использованием градиентных методов оптимизации в предположении, что целевая функция 𝐸(𝑤) непрерывна.
Градиентные методы на каждом шаге уточняют значения параметров, по
которым проводится оптимизация, согласно формуле:
𝑤(𝑘 + 1) = 𝑤(𝑘) + ∆𝑤,
где ∆𝑤 = 𝜂𝑝(𝑤) определяет сдвиг значений параметров, 𝜂, 0 < 𝜂 < 1 – скорость обучения – параметр обучения, который определяет «скорость» движения в направлении минимального значения функции, 𝑝(𝑤) – направление в многомерном пространстве параметров нейронной сети.
В классическом методе обратного распространения ошибки направление движения совпадает с направлением антиградиента 𝑝(𝑤) = −∇𝐸(𝑤).
Общая схема метода обратного распространения ошибки включает несколько основных этапов. Первоначально синаптические веса сети инициализируются определенным образом, например, нулевыми значениями или случайно из некоторого распределения.
В данной работе была выбрана инициализация весов Ксавье:
нужно умножить случайную инициализацию на:

Далее метод работает для каждого примера обучающей выборки.
-
Прямой проход нейронной сети в направлении передачи информации от входного сигнала к скрытым слоям и выходному слою сети. На данном этапе вычисляются значения выходных сигналов нейронов скрытых слоев и выходного слоя, а также соответствующие значения производных функций активации на каждом слое сети.
-
Вычисление значения функции ошибки и градиента этой функции.
-
Обратный проход нейронной сети в направлении от выходного слоя к входному слою, и корректировка синаптических весов.
-
Повторение этапов 1 – 3 до момента выполнения критериев остановки. В качестве критериев остановки используется число итераций метода (количество проходов), либо достигнутая точность.
В процессе обучения многослойной полносвязной нейронной сети ей многократно предъявляется предопределенное множество обучающих примеров. Один полный цикл предъявления полного набора примеров называется эпохой. В ходе обучения может выполняться несколько таких циклов до момента стабилизации синаптических весов, либо достижения минимального значения функции ошибки.
В данной работе используется стохастический поиск – когда изменяется порядок примеров в обучающей выборке перед каждой эпохой.
Так же используется пакетный режим. В данном режиме корректировка весов осуществляется по всем примерам эпохи. В этом случае используется функция ошибки для всего набора тренировочных данных, нормированная по числу примеров выборки. Корректировка весов также проводится по всему набору данных.
В качестве функции активации на скрытом слое используется функция LReLU.

В качестве функции активации на втором слое используется функция softmax.

В качестве функции ошибки используется крос-энтропия.

Псевдокод:

Вывод математических формул
Подробнее в отчете otchet.pdf
Программная реализация
Инструкция по сборке программного кода и запуску приложения на данных базы MNIST
Перед запуском необходимо установить пакеты tensorflow, keras, numpy, sklearn.
Помощь по установке этих и других пакетов для Windows вы можете найти здесь: https://github.com/jeffheaton/t81_558_deep_learning/blob/master/t81_558_class_01_1_overview.ipynb.
Для запуска приложения можно воспользоваться Jupyter Notebook (файл backpropagation.ipynb).
Для запуска с Anaconda Prompt нужно создать окружение(enviroment), перейти в него и запустить backpropagation.py.
Описание разработанного программного кода
Рассмотрим класс network. Для того, чтобы обучить сеть, необходимо создать экземпляр класса network. Экземпляр класса содержит:
-
self.speed– скорость обучения -
self.batch— батч#число нейронов входного слоя -
self.num_input_neurons_x#число нейронов скрытого слоя -
self.num_hidden_neurons_v = num_hidden_neurons_v -
self.V– нейроны скрытого слоя#число нейронов выходного слоя -
self.num_output_neurons_u = num_output_neurons_u -
self.U– нейроны выходного слоя -
self.w2– веса от скрытого слоя к выходному -
self.w1– веса от входного слоя к скрытому -
self.der_LReLU– производные от функции LReLU скрытого слоя
Функцияrun – пример использования класса network.
Функция run создает экземпляр класса network и вызывает функцию обучения fit.
run(num_hidden_neurons_v, epoch, batch, speed_train) показывает как можно обучить
нейронную сеть, используя данные MNIST и проверить результат на тренировочной и тестовой выборках.
Функция run принимает на вход:
num_hidden_neurons_v– число нейронов на скрытом слоеepoch– чило эпохbatch– размер батчаspeed_train– скорость обучения
Функция fit обеспечивает обучение и тестирование сети, получая на вход выборки, размер пачек, скорость обучения и количество эпох.
fit реализует стохастический пакетный режим обучения и выбор весов с помощью метода обратного распространения ошибки.
Функция fit принимает на вход:
x_train– входные данныеy_train— правильные ответы(метки)batch– размер пачкиspeed_train– скорость обученияepoch– количество эпох
Эксперименты

Применение алгоритма обратного распространения ошибки — один из известных методов, используемых для глубокого обучения нейронных сетей прямого распространения (такие сети ещё называют многослойными персептронами). Этот метод относят к методу обучения с учителем, поэтому требуется задавать в обучающих примерах целевые значения. В этой статье мы рассмотрим, что собой представляет метод обратного распространения ошибки, как он реализуется, каковы его плюсы и минусы.
Сегодня нейронные сети прямого распространения используются для решения множества сложных задач. Если говорить об обучении нейронных сетей методом обратного распространения, то тут пользуются двумя проходами по всем слоям нейросети: прямым и обратным. При выполнении прямого прохода осуществляется подача входного вектора на входной слой сети, после чего происходит распространение по нейронной сети от слоя к слою. В итоге должна осуществляться генерация набора выходных сигналов — именно он, по сути, является реакцией нейронной сети на этот входной образ. При прямом проходе все синаптические веса нейросети фиксированы. При обратном проходе все синаптические веса настраиваются согласно правил коррекции ошибок, когда фактический выход нейронной сети вычитается из желаемого, что приводит к формированию сигнала ошибки. Такой сигнал в дальнейшем распространяется по сети, причём направление распространения обратно направлению синаптических связей. Именно поэтому соответствующий метод и называют алгоритмом с обратно распространённой ошибкой. Синаптические веса настраивают с целью наибольшего приближения выходного сигнала нейронной сети к желаемому.
Общее описание алгоритма обратного распространения ошибки
К примеру, нам надо обучить нейронную сеть по аналогии с той, что представлена на картинке ниже. Естественно, задачу следует выполнить, применяя алгоритм обратного распространения ошибки:
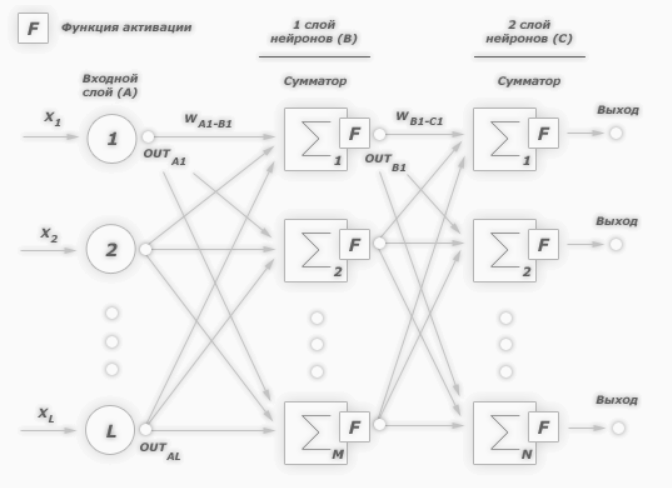
В многослойных персептронах в роли активационной функции обычно применяют сигмоидальную активационную функция, в нашем случае — логистическую. Формула:

Причём «альфа» здесь означает параметр наклона сигмоидальной функции. Меняя его, мы получаем возможность строить функции с разной крутизной.
Сигмоид может сужать диапазон изменения таким образом, чтобы значение OUT лежало между нулем и единицей. Нейронные многослойные сети характеризуются более высокой представляющей мощностью, если сравнивать их с однослойными, но это утверждение справедливо лишь в случае нелинейности. Нужную нелинейность и обеспечивает сжимающая функция. Но на практике существует много функций, которые можно использовать. Говоря о работе алгоритма обратного распространения ошибки, скажем, что для этого нужно лишь, чтобы функция была везде дифференцируема, а данному требованию как раз и удовлетворяет сигмоид. У него есть и дополнительное преимущество — автоматический контроль усиления. Если речь идёт о слабых сигналах (OUT близко к нулю), то кривая «вход-выход» характеризуется сильным наклоном, дающим большое усиление. При увеличении сигнала усиление падает. В результате большие сигналы будут восприниматься сетью без насыщения, а слабые сигналы будут проходить по сети без чрезмерного ослабления.
Цель обучения сети
Цель обучения нейросети при использовании алгоритма обратного распространения ошибки — это такая подстройка весов нейросети, которая позволит при приложении некоторого множества входов получить требуемое множество выходов нейронов (выходных нейронов). Можно назвать эти множества входов и выходов векторами. В процессе обучения предполагается, что для любого входного вектора существует целевой вектор, парный входному и задающий требуемый выход. Эту пару называют обучающей. Работая с нейросетями, мы обучаем их на многих парах.
Также можно сказать, что алгоритм использует стохастический градиентный спуск и продвигается в многомерном пространстве весов в направлении антиградиента, причём цель — это достижение минимума функции ошибки.
При практическом применении метода обучение продолжают не до максимально точной настройки нейросети на минимум функции ошибки, а пока не будет достигнуто довольно точное его приближение. С одной стороны, это даёт возможность уменьшить количество итераций обучения, с другой — избежать переобучения нейронной сети.
Пошаговая реализация метода обратного распространения ошибки
Необходимо выполнить следующие действия:
1. Инициализировать синаптические веса случайными маленькими значениями.
2. Выбрать из обучающего множества очередную обучающую пару; подать на вход сети входной вектор.
3. Выполнить вычисление выходных значений нейронной сети.
4. Посчитать разность между выходом нейросети и требуемым выходом (речь идёт о целевом векторе обучающей пары).
5. Скорректировать веса сети в целях минимизации ошибки.
6. Повторять для каждого вектора обучающего множества шаги 2-5, пока ошибка обучения нейронной сети на всём множестве не достигнет уровня, который является приемлемым.
Виды обучения сети по методу обратного распространения
Сегодня существует много модификаций алгоритма обратного распространения ошибки. Возможно обучение не «по шагам» (выходная ошибка вычисляется, веса корректируются на каждом примере), а «по эпохам» в offline-режиме (изменения весовых коэффициентов происходит после подачи на вход нейросети всех примеров обучающего множества, а ошибка обучения neural сети усредняется по всем примерам).
Обучение «по эпохам» более устойчиво к выбросам и аномальным значениям целевой переменной благодаря усреднению ошибки по многим примерам. Зато в данном случае увеличивается вероятность «застревания» в локальных минимумах. При обучении «по шагам» такая вероятность меньше, ведь применение отдельных примеров создаёт «шум», «выталкивающий» алгоритм обратного распространения из ям градиентного рельефа.
Преимущества и недостатки метода
К плюсам можно отнести простоту в реализации и устойчивость к выбросам и аномалиям в данных, и это основные преимущества. Но есть и минусы:
• неопределенно долгий процесс обучения;
• вероятность «паралича сети» (при больших значениях рабочая точка функции активации попадает в область насыщения сигмоиды, а производная величина приближается к 0, в результате чего коррекции весов почти не происходят, а процесс обучения «замирает»;
• алгоритм уязвим к попаданию в локальные минимумы функции ошибки.
Значение метода обратного распространения
Появление алгоритма стало знаковым событием и положительно отразилось на развитии нейросетей, ведь он реализует эффективный с точки зрения вычислительных процессов способ обучения многослойного персептрона. В то же самое время, было бы неправильным сказать, что алгоритм предлагает наиболее оптимальное решение всех потенциальных проблем. Зато он действительно развеял пессимизм относительно машинного обучения многослойных машин, который воцарился после публикации в 1969 году работы американского учёного с фамилией Минский.
Источники:
— «Алгоритм обратного распространения ошибки»;
— «Back propagation algorithm».
Перевод
Ссылка на автора
Алгоритм обратного распространения — это классическая искусственная нейронная сеть с прямой связью.
Эта техника до сих пор используется для тренировки большого глубокое обучение сетей.
В этом руководстве вы узнаете, как реализовать алгоритм обратного распространения с нуля с помощью Python.
После завершения этого урока вы узнаете:
- Как переадресовать входные данные для вычисления выходных данных.
- Как распространять ошибки и обучать сеть.
- Как применить алгоритм обратного распространения к реальной задаче прогнозного моделирования.
Давайте начнем.
- Обновление ноябрь 2016: Исправлена ошибка в функции activ (). Спасибо Алекс!
- Обновление январь / 2017: Изменено вычисление fold_size в cross_validation_split (), чтобы оно всегда было целым числом. Исправляет проблемы с Python 3.
- Обновление январь / 2017: Обновлена небольшая ошибка в update_weights (). Спасибо, Томаш!
- Обновление апрель / 2018: Добавлена прямая ссылка на набор данных CSV.
- Обновление Авг / 2018: Протестировано и обновлено для работы с Python 3.6.

Описание
В этом разделе дается краткое введение в алгоритм обратного распространения и набор данных семян пшеницы, которые мы будем использовать в этом руководстве.
Алгоритм обратного распространения
Алгоритм обратного распространения — это контролируемый метод обучения для многослойных сетей прямой связи из области искусственных нейронных сетей.
Прямые нейронные сети вдохновлены обработкой информации одной или нескольких нейронных клеток, называемых нейронами. Нейрон принимает входные сигналы через свои дендриты, которые передают электрический сигнал в тело клетки. Аксон передает сигнал в синапсы, которые являются связями аксона клетки с дендритами другой клетки.
Принцип обратного распространения заключается в моделировании заданной функции путем изменения внутренних весовых коэффициентов входных сигналов для получения ожидаемого выходного сигнала. Система обучается с использованием метода контролируемого обучения, где ошибка между выходными данными системы и известным ожидаемым выходным значением представляется системе и используется для изменения ее внутреннего состояния.
Технически алгоритм обратного распространения — это метод обучения весов в многослойной нейронной сети с прямой связью. Как таковой, он требует, чтобы сетевая структура была определена из одного или нескольких уровней, где один уровень полностью связан со следующим уровнем. Стандартная сетевая структура — это один входной слой, один скрытый слой и один выходной слой.
Обратное распространение можно использовать как для задач классификации, так и для задач регрессии, но в этом руководстве мы сосредоточимся на классификации.
В задачах классификации наилучшие результаты достигаются, когда сеть имеет один нейрон в выходном слое для каждого значения класса. Например, проблема 2-классовой или двоичной классификации со значениями классов A и B. Эти ожидаемые результаты должны быть преобразованы в двоичные векторы с одним столбцом для каждого значения класса. Например, [1, 0] и [0, 1] для A и B соответственно. Это называется горячим кодированием.
Набор данных семян пшеницы
Набор данных семян включает в себя прогнозирование видов с учетом измерений семян из разных сортов пшеницы.
Есть 201 записей и 7 числовых входных переменных. Это проблема классификации с 3 выходными классами. Шкала для каждого числового входного значения варьируется, поэтому может потребоваться некоторая нормализация данных для использования с алгоритмами, которые взвешивают входные данные, такие как алгоритм обратного распространения.
Ниже приведен образец первых 5 строк набора данных.
15.26,14.84,0.871,5.763,3.312,2.221,5.22,1
14.88,14.57,0.8811,5.554,3.333,1.018,4.956,1
14.29,14.09,0.905,5.291,3.337,2.699,4.825,1
13.84,13.94,0.8955,5.324,3.379,2.259,4.805,1
16.14,14.99,0.9034,5.658,3.562,1.355,5.175,1При использовании алгоритма нулевого правила, который прогнозирует наиболее распространенное значение класса, базовая точность задачи составляет 28,095%.
Вы можете узнать больше и загрузить набор данных семян из UCI Хранилище Машинного Обучения,
Загрузите набор данных seed и поместите его в текущий рабочий каталог с именем файлаseeds_dataset.csv,
Набор данных представлен в формате табуляции, поэтому его необходимо преобразовать в CSV с помощью текстового редактора или программы для работы с электронными таблицами.
Обновите, загрузите набор данных в формате CSV напрямую:
- Скачать набор данных семян пшеницы
Руководство
Этот урок разбит на 6 частей:
- Инициализировать сеть.
- Вперед Распространять.
- Ошибка обратного распространения.
- Сеть поездов.
- Предсказать.
- Пример набора данных семян.
Эти шаги обеспечат основу, необходимую для реализации алгоритма обратного распространения с нуля и применения его к собственным задачам прогнозного моделирования.
1. Инициализировать сеть
Давайте начнем с чего-то простого, создания новой сети, готовой к обучению.
Каждый нейрон имеет набор весов, которые необходимо поддерживать. Один вес для каждого входного соединения и дополнительный вес для смещения. Нам нужно будет хранить дополнительные свойства для нейрона во время обучения, поэтому мы будем использовать словарь для представления каждого нейрона и сохранять свойства по именам, таким как ‘веса‘Для весов.
Сеть организована в слои. Входной слой на самом деле просто строка из нашего набора обучающих данных Первый настоящий слой — это скрытый слой. Затем следует выходной слой, который имеет один нейрон для каждого значения класса.
Мы организуем слои как массивы словарей и будем рассматривать всю сеть как массив слоев.
Хорошей практикой является инициализация весов сети небольшими случайными числами. В этом случае мы будем использовать случайные числа в диапазоне от 0 до 1.
Ниже приведена функция с именемinitialize_network ()это создает новую нейронную сеть, готовую к обучению. Он принимает три параметра: количество входов, количество нейронов в скрытом слое и количество выходов.
Вы можете видеть, что для скрытого слоя мы создаемn_hiddenнейроны и каждый нейрон в скрытом слое имеетn_inputs + 1веса, один для каждого входного столбца в наборе данных и дополнительный для смещения.
Вы также можете видеть, что выходной слой, который подключается к скрытому слою, имеетn_outputsнейроны, каждый сn_hidden + 1веса. Это означает, что каждый нейрон в выходном слое соединяется (имеет вес) с каждым нейроном в скрытом слое.
# Initialize a network
def initialize_network(n_inputs, n_hidden, n_outputs):
network = list()
hidden_layer = [{'weights':[random() for i in range(n_inputs + 1)]} for i in range(n_hidden)]
network.append(hidden_layer)
output_layer = [{'weights':[random() for i in range(n_hidden + 1)]} for i in range(n_outputs)]
network.append(output_layer)
return networkДавайте проверим эту функцию. Ниже приведен полный пример, который создает небольшую сеть.
from random import seed
from random import random
# Initialize a network
def initialize_network(n_inputs, n_hidden, n_outputs):
network = list()
hidden_layer = [{'weights':[random() for i in range(n_inputs + 1)]} for i in range(n_hidden)]
network.append(hidden_layer)
output_layer = [{'weights':[random() for i in range(n_hidden + 1)]} for i in range(n_outputs)]
network.append(output_layer)
return network
seed(1)
network = initialize_network(2, 1, 2)
for layer in network:
print(layer)Запустив пример, вы можете увидеть, что код распечатывает каждый слой по одному. Вы можете видеть, что скрытый слой имеет один нейрон с 2 входными весами плюс смещение. Выходной слой имеет 2 нейрона, каждый с 1 весом плюс смещение.
[{'weights': [0.13436424411240122, 0.8474337369372327, 0.763774618976614]}]
[{'weights': [0.2550690257394217, 0.49543508709194095]}, {'weights': [0.4494910647887381, 0.651592972722763]}]Теперь, когда мы знаем, как создать и инициализировать сеть, давайте посмотрим, как мы можем использовать ее для вычисления результата.
2. Вперед Распространение
Мы можем вычислить выход из нейронной сети, распространяя входной сигнал через каждый уровень, пока выходной уровень не выведет свои значения.
Мы называем это продвижением вперед.
Это метод, который нам понадобится для генерации прогнозов во время обучения, который необходимо будет исправить, и это метод, который нам понадобится после обучения сети для прогнозирования новых данных.
Мы можем разбить распространение вперед на три части:
- Активация нейронов.
- Передача нейронов.
- Вперед Распространение.
2.1. Активация нейронов
Первым шагом является вычисление активации одного нейрона с учетом входных данных.
Входными данными может быть строка из нашего обучающего набора данных, как в случае со скрытым слоем. Это также могут быть выходы от каждого нейрона в скрытом слое, в случае выходного слоя.
Активация нейрона рассчитывается как взвешенная сумма входов. Очень похоже на линейную регрессию.
activation = sum(weight_i * input_i) + biasкудавесвес сети,входявляется входом,яэто индекс веса или ввода исмещениеэто специальный вес, который не имеет входных данных для умножения (или вы можете думать, что входные данные всегда равны 1,0).
Ниже приведена реализация этого в функции с именемактивировать (), Вы можете видеть, что функция предполагает, что смещение является последним весом в списке весов. Это помогает здесь и позже сделать код легче для чтения.
# Calculate neuron activation for an input
def activate(weights, inputs):
activation = weights[-1]
for i in range(len(weights)-1):
activation += weights[i] * inputs[i]
return activationТеперь давайте посмотрим, как использовать активацию нейронов.
2.2. Нейрон Трансфер
Как только нейрон активирован, нам нужно перенести активацию, чтобы увидеть, что на самом деле представляет собой выход нейрона.
Различные передаточные функции могут быть использованы. Традиционно использовать функция активации сигмовидной кишки, но вы также можете использовать танх (тангенс гиперболический) функция для передачи выходов. Совсем недавно передаточная функция выпрямителя был популярен в крупных сетях глубокого обучения.
Функция активации сигмоида выглядит как S-образная форма, ее также называют логистической функцией. Он может принимать любое входное значение и производить число от 0 до 1 на S-кривой. Это также функция, из которой мы можем легко рассчитать производную (наклон), которая понадобится нам позже при ошибке обратного распространения.
Мы можем передать функцию активации с помощью функции сигмоида следующим образом:
output = 1 / (1 + e^(-activation))кудаеявляется основанием натуральных логарифмов (Номер Эйлера).
Ниже приведена функция с именемперечислить()который реализует сигмовидное уравнение.
# Transfer neuron activation
def transfer(activation):
return 1.0 / (1.0 + exp(-activation))Теперь, когда у нас есть кусочки, давайте посмотрим, как они используются.
2,3. Прямое распространение
Вперед, распространение входных данных просто.
Мы работаем через каждый слой нашей сети, вычисляя выходы для каждого нейрона. Все выходы из одного слоя становятся входами для нейронов на следующем слое.
Ниже приведена функция с именемforward_propagate ()это реализует прямое распространение для ряда данных из нашего набора данных с нашей нейронной сетью.
Вы можете видеть, что выходное значение нейрона хранится в нейроне с именем ‘выход«. Вы также можете увидеть, что мы собираем выходные данные для слоя в массиве с именемnew_inputsэто становится массивомвходныеи используется в качестве входных данных для следующего слоя.
Функция возвращает выходные данные из последнего слоя, также называемого выходным слоем.
# Forward propagate input to a network output
def forward_propagate(network, row):
inputs = row
for layer in network:
new_inputs = []
for neuron in layer:
activation = activate(neuron['weights'], inputs)
neuron['output'] = transfer(activation)
new_inputs.append(neuron['output'])
inputs = new_inputs
return inputsДавайте соединим все эти части и протестируем прямое распространение нашей сети.
Мы определяем нашу сеть, встроенную одним скрытым нейроном, который ожидает 2 входных значения, и выходной слой с двумя нейронами.
from math import exp
# Calculate neuron activation for an input
def activate(weights, inputs):
activation = weights[-1]
for i in range(len(weights)-1):
activation += weights[i] * inputs[i]
return activation
# Transfer neuron activation
def transfer(activation):
return 1.0 / (1.0 + exp(-activation))
# Forward propagate input to a network output
def forward_propagate(network, row):
inputs = row
for layer in network:
new_inputs = []
for neuron in layer:
activation = activate(neuron['weights'], inputs)
neuron['output'] = transfer(activation)
new_inputs.append(neuron['output'])
inputs = new_inputs
return inputs
# test forward propagation
network = [[{'weights': [0.13436424411240122, 0.8474337369372327, 0.763774618976614]}],
[{'weights': [0.2550690257394217, 0.49543508709194095]}, {'weights': [0.4494910647887381, 0.651592972722763]}]]
row = [1, 0, None]
output = forward_propagate(network, row)
print(output)Выполнение примера распространяет входной шаблон [1, 0] и выдает выходное значение, которое печатается. Поскольку выходной слой имеет два нейрона, мы получаем список из двух чисел в качестве вывода.
Фактические выходные значения на данный момент просто бессмыслица, но затем мы начнем изучать, как сделать веса в нейронах более полезными.
[0.6629970129852887, 0.7253160725279748]3. Ошибка обратного распространения
Алгоритм обратного распространения назван по способу обучения весов.
Ошибка рассчитывается между ожидаемыми выходами и выходами, передаваемыми по сети. Эти ошибки затем распространяются в обратном направлении через сеть от выходного уровня к скрытому слою, назначая вину за ошибку и обновляя веса по мере их появления.
Математика для ошибки обратного распространения коренится в исчислении, но мы останемся на высоком уровне в этом разделе и сосредоточимся на том, что рассчитывается и как, а не почему расчеты принимают эту конкретную форму.
Эта часть разбита на две части.
- Передача Производная.
- Ошибка обратного распространения.
3.1. Производная передача
Учитывая выходное значение от нейрона, нам нужно вычислить его наклон.
Мы используем передаточную функцию сигмоида, производную которой можно рассчитать следующим образом:
derivative = output * (1.0 - output)Ниже приведена функция с именемtransfer_derivative ()который реализует это уравнение.
# Calculate the derivative of an neuron output
def transfer_derivative(output):
return output * (1.0 - output)Теперь посмотрим, как это можно использовать.
3.2. Ошибка обратного распространения
Первым шагом является вычисление ошибки для каждого выходного нейрона, это даст нам наш сигнал ошибки (вход) для распространения в обратном направлении по сети.
Ошибка для данного нейрона может быть рассчитана следующим образом:
error = (expected - output) * transfer_derivative(output)кудаожидаемыйявляется ожидаемым выходным значением для нейрона,выходэто выходное значение для нейрона иtransfer_derivative ()вычисляет наклон выходного значения нейрона, как показано выше.
Этот расчет ошибки используется для нейронов в выходном слое. Ожидаемое значение — это само значение класса. В скрытом слое все немного сложнее.
Сигнал ошибки для нейрона в скрытом слое рассчитывается как взвешенная ошибка каждого нейрона в выходном слое. Подумайте об ошибке, связанной с перемещением весов выходного слоя к нейронам в скрытом слое.
Обратно распространяющийся сигнал ошибки накапливается и затем используется для определения ошибки для нейрона в скрытом слое следующим образом:
error = (weight_k * error_j) * transfer_derivative(output)кудаerror_jэто сигнал ошибки отJй нейрон в выходном слое,weight_kэто вес, который соединяетКТретий нейрон к текущему нейрону и выход — это выход для текущего нейрона.
Ниже приведена функция с именемbackward_propagate_error ()который реализует эту процедуру.
Вы можете видеть, что сигнал ошибки, рассчитанный для каждого нейрона, хранится с именем «delta». Вы можете видеть, что слои сети перебираются в обратном порядке, начиная с выхода и работая в обратном направлении. Это гарантирует, что нейроны в выходном слое сначала рассчитывают значения «дельта», которые нейроны в скрытом слое могут использовать в последующей итерации. Я выбрал имя «дельта», чтобы отразить изменение, которое ошибка вносит в нейрон (например, дельта веса).
Вы можете видеть, что сигнал ошибки для нейронов в скрытом слое накапливается от нейронов в выходном слое, где скрыт номер нейронаJтакже индекс веса нейрона в выходном слоенейрон [грузики ‘] [J],
# Backpropagate error and store in neurons
def backward_propagate_error(network, expected):
for i in reversed(range(len(network))):
layer = network[i]
errors = list()
if i != len(network)-1:
for j in range(len(layer)):
error = 0.0
for neuron in network[i + 1]:
error += (neuron['weights'][j] * neuron['delta'])
errors.append(error)
else:
for j in range(len(layer)):
neuron = layer[j]
errors.append(expected[j] - neuron['output'])
for j in range(len(layer)):
neuron = layer[j]
neuron['delta'] = errors[j] * transfer_derivative(neuron['output'])Давайте соберем все части вместе и посмотрим, как это работает.
Мы определяем фиксированную нейронную сеть с выходными значениями и распространяем ожидаемый выходной шаблон. Полный пример приведен ниже.
# Calculate the derivative of an neuron output
def transfer_derivative(output):
return output * (1.0 - output)
# Backpropagate error and store in neurons
def backward_propagate_error(network, expected):
for i in reversed(range(len(network))):
layer = network[i]
errors = list()
if i != len(network)-1:
for j in range(len(layer)):
error = 0.0
for neuron in network[i + 1]:
error += (neuron['weights'][j] * neuron['delta'])
errors.append(error)
else:
for j in range(len(layer)):
neuron = layer[j]
errors.append(expected[j] - neuron['output'])
for j in range(len(layer)):
neuron = layer[j]
neuron['delta'] = errors[j] * transfer_derivative(neuron['output'])
# test backpropagation of error
network = [[{'output': 0.7105668883115941, 'weights': [0.13436424411240122, 0.8474337369372327, 0.763774618976614]}],
[{'output': 0.6213859615555266, 'weights': [0.2550690257394217, 0.49543508709194095]}, {'output': 0.6573693455986976, 'weights': [0.4494910647887381, 0.651592972722763]}]]
expected = [0, 1]
backward_propagate_error(network, expected)
for layer in network:
print(layer)При выполнении примера печатается сеть после обратного распространения ошибки. Вы можете видеть, что значения ошибок рассчитываются и сохраняются в нейронах для выходного слоя и скрытого слоя.
[{'output': 0.7105668883115941, 'weights': [0.13436424411240122, 0.8474337369372327, 0.763774618976614], 'delta': -0.0005348048046610517}]
[{'output': 0.6213859615555266, 'weights': [0.2550690257394217, 0.49543508709194095], 'delta': -0.14619064683582808}, {'output': 0.6573693455986976, 'weights': [0.4494910647887381, 0.651592972722763], 'delta': 0.0771723774346327}]Теперь давайте использовать обратное распространение ошибки для обучения сети.
4. Сеть поездов
Сеть обучается с использованием стохастического градиентного спуска.
Это включает в себя несколько итераций представления обучающего набора данных в сеть и для каждой строки данных, передавая входные данные, распространяя ошибку в обратном направлении и обновляя веса сети.
Эта часть разбита на две части:
- Обновление весов.
- Сеть поездов.
4.1. Обновление весов
Как только ошибки рассчитаны для каждого нейрона в сети с помощью метода обратного распространения, описанного выше, их можно использовать для обновления весов.
Веса сети обновляются следующим образом:
weight = weight + learning_rate * error * inputкудавесзаданный вес,learning_rateэто параметр, который вы должны указать,ошибкаошибка, рассчитанная по процедуре обратного распространения для нейрона ивходэто входное значение, вызвавшее ошибку
Та же процедура может использоваться для обновления веса смещения, за исключением того, что нет входного термина или входное значение является фиксированным значением 1,0.
Скорость обучения определяет, насколько изменить вес, чтобы исправить ошибку. Например, значение 0,1 обновит вес на 10% от суммы, которую он мог бы обновить. Предпочтительными являются малые скорости обучения, которые вызывают более медленное обучение в течение большого количества итераций обучения. Это увеличивает вероятность того, что сеть найдет хороший набор весов на всех уровнях, а не самый быстрый набор весов, которые минимизируют ошибку (так называемая преждевременная сходимость).
Ниже приведена функция с именемupdate_weights ()который обновляет весовые коэффициенты для сети с учетом входной строки данных, скорости обучения и предполагает, что прямое и обратное распространение уже выполнено.
Помните, что вход для выходного слоя представляет собой набор выходов из скрытого слоя.
# Update network weights with error
def update_weights(network, row, l_rate):
for i in range(len(network)):
inputs = row[:-1]
if i != 0:
inputs = [neuron['output'] for neuron in network[i - 1]]
for neuron in network[i]:
for j in range(len(inputs)):
neuron['weights'][j] += l_rate * neuron['delta'] * inputs[j]
neuron['weights'][-1] += l_rate * neuron['delta']Теперь мы знаем, как обновить вес сети, давайте посмотрим, как мы можем сделать это многократно.
4.2. Сеть поездов
Как уже упоминалось, сеть обновляется с использованием стохастического градиентного спуска.
Это включает в себя первый цикл для фиксированного числа эпох и в каждой эпохе обновление сети для каждой строки в наборе обучающих данных.
Поскольку обновления производятся для каждого шаблона обучения, этот тип обучения называется онлайн-обучением. Если ошибки были накоплены за период до обновления весов, это называется периодическим обучением или пакетным градиентным спуском.
Ниже приведена функция, которая реализует обучение уже инициализированной нейронной сети с заданным набором обучающих данных, скоростью обучения, фиксированным числом эпох и ожидаемым количеством выходных значений.
Ожидаемое количество выходных значений используется для преобразования значений класса в обучающих данных в одно горячее кодирование. Это двоичный вектор с одним столбцом для каждого значения класса, чтобы соответствовать выходу сети. Это необходимо для расчета ошибки для выходного слоя.
Вы также можете видеть, что ошибка квадрата суммы между ожидаемым выходом и выходом сети накапливается каждую эпоху и печатается. Это полезно для отслеживания того, насколько сеть изучает и совершенствует каждую эпоху.
# Train a network for a fixed number of epochs
def train_network(network, train, l_rate, n_epoch, n_outputs):
for epoch in range(n_epoch):
sum_error = 0
for row in train:
outputs = forward_propagate(network, row)
expected = [0 for i in range(n_outputs)]
expected[row[-1]] = 1
sum_error += sum([(expected[i]-outputs[i])**2 for i in range(len(expected))])
backward_propagate_error(network, expected)
update_weights(network, row, l_rate)
print('>epoch=%d, lrate=%.3f, error=%.3f' % (epoch, l_rate, sum_error))Теперь у нас есть все для обучения сети. Мы можем собрать пример, который включает в себя все, что мы видели до сих пор, включая инициализацию сети и обучение сети на небольшом наборе данных.
Ниже приведен небольшой надуманный набор данных, который мы можем использовать для тестирования нашей нейронной сети.
X1 X2 Y
2.7810836 2.550537003 0
1.465489372 2.362125076 0
3.396561688 4.400293529 0
1.38807019 1.850220317 0
3.06407232 3.005305973 0
7.627531214 2.759262235 1
5.332441248 2.088626775 1
6.922596716 1.77106367 1
8.675418651 -0.242068655 1
7.673756466 3.508563011 1Ниже приведен полный пример. Мы будем использовать 2 нейрона в скрытом слое. Это проблема двоичной классификации (2 класса), поэтому в выходном слое будет два нейрона. Сеть будет обучаться в течение 20 эпох со скоростью обучения 0,5, что является высоким показателем, потому что мы готовим так мало итераций.
from math import exp
from random import seed
from random import random
# Initialize a network
def initialize_network(n_inputs, n_hidden, n_outputs):
network = list()
hidden_layer = [{'weights':[random() for i in range(n_inputs + 1)]} for i in range(n_hidden)]
network.append(hidden_layer)
output_layer = [{'weights':[random() for i in range(n_hidden + 1)]} for i in range(n_outputs)]
network.append(output_layer)
return network
# Calculate neuron activation for an input
def activate(weights, inputs):
activation = weights[-1]
for i in range(len(weights)-1):
activation += weights[i] * inputs[i]
return activation
# Transfer neuron activation
def transfer(activation):
return 1.0 / (1.0 + exp(-activation))
# Forward propagate input to a network output
def forward_propagate(network, row):
inputs = row
for layer in network:
new_inputs = []
for neuron in layer:
activation = activate(neuron['weights'], inputs)
neuron['output'] = transfer(activation)
new_inputs.append(neuron['output'])
inputs = new_inputs
return inputs
# Calculate the derivative of an neuron output
def transfer_derivative(output):
return output * (1.0 - output)
# Backpropagate error and store in neurons
def backward_propagate_error(network, expected):
for i in reversed(range(len(network))):
layer = network[i]
errors = list()
if i != len(network)-1:
for j in range(len(layer)):
error = 0.0
for neuron in network[i + 1]:
error += (neuron['weights'][j] * neuron['delta'])
errors.append(error)
else:
for j in range(len(layer)):
neuron = layer[j]
errors.append(expected[j] - neuron['output'])
for j in range(len(layer)):
neuron = layer[j]
neuron['delta'] = errors[j] * transfer_derivative(neuron['output'])
# Update network weights with error
def update_weights(network, row, l_rate):
for i in range(len(network)):
inputs = row[:-1]
if i != 0:
inputs = [neuron['output'] for neuron in network[i - 1]]
for neuron in network[i]:
for j in range(len(inputs)):
neuron['weights'][j] += l_rate * neuron['delta'] * inputs[j]
neuron['weights'][-1] += l_rate * neuron['delta']
# Train a network for a fixed number of epochs
def train_network(network, train, l_rate, n_epoch, n_outputs):
for epoch in range(n_epoch):
sum_error = 0
for row in train:
outputs = forward_propagate(network, row)
expected = [0 for i in range(n_outputs)]
expected[row[-1]] = 1
sum_error += sum([(expected[i]-outputs[i])**2 for i in range(len(expected))])
backward_propagate_error(network, expected)
update_weights(network, row, l_rate)
print('>epoch=%d, lrate=%.3f, error=%.3f' % (epoch, l_rate, sum_error))
# Test training backprop algorithm
seed(1)
dataset = [[2.7810836,2.550537003,0],
[1.465489372,2.362125076,0],
[3.396561688,4.400293529,0],
[1.38807019,1.850220317,0],
[3.06407232,3.005305973,0],
[7.627531214,2.759262235,1],
[5.332441248,2.088626775,1],
[6.922596716,1.77106367,1],
[8.675418651,-0.242068655,1],
[7.673756466,3.508563011,1]]
n_inputs = len(dataset[0]) - 1
n_outputs = len(set([row[-1] for row in dataset]))
network = initialize_network(n_inputs, 2, n_outputs)
train_network(network, dataset, 0.5, 20, n_outputs)
for layer in network:
print(layer)При запуске примера сначала выводится ошибка квадрата суммы в каждую эпоху обучения. Мы можем видеть тенденцию уменьшения этой ошибки с каждой эпохой.
После обучения распечатывается сеть с отображением изученных весов. Также все еще в сети находятся выходные и дельта-значения, которые можно игнорировать. Мы могли бы обновить нашу функцию обучения, чтобы удалить эти данные, если мы хотим.
>epoch=0, lrate=0.500, error=6.350
>epoch=1, lrate=0.500, error=5.531
>epoch=2, lrate=0.500, error=5.221
>epoch=3, lrate=0.500, error=4.951
>epoch=4, lrate=0.500, error=4.519
>epoch=5, lrate=0.500, error=4.173
>epoch=6, lrate=0.500, error=3.835
>epoch=7, lrate=0.500, error=3.506
>epoch=8, lrate=0.500, error=3.192
>epoch=9, lrate=0.500, error=2.898
>epoch=10, lrate=0.500, error=2.626
>epoch=11, lrate=0.500, error=2.377
>epoch=12, lrate=0.500, error=2.153
>epoch=13, lrate=0.500, error=1.953
>epoch=14, lrate=0.500, error=1.774
>epoch=15, lrate=0.500, error=1.614
>epoch=16, lrate=0.500, error=1.472
>epoch=17, lrate=0.500, error=1.346
>epoch=18, lrate=0.500, error=1.233
>epoch=19, lrate=0.500, error=1.132
[{'weights': [-1.4688375095432327, 1.850887325439514, 1.0858178629550297], 'output': 0.029980305604426185, 'delta': -0.0059546604162323625}, {'weights': [0.37711098142462157, -0.0625909894552989, 0.2765123702642716], 'output': 0.9456229000211323, 'delta': 0.0026279652850863837}]
[{'weights': [2.515394649397849, -0.3391927502445985, -0.9671565426390275], 'output': 0.23648794202357587, 'delta': -0.04270059278364587}, {'weights': [-2.5584149848484263, 1.0036422106209202, 0.42383086467582715], 'output': 0.7790535202438367, 'delta': 0.03803132596437354}]Как только сеть обучена, мы должны использовать ее для прогнозирования.
5. Предсказать
Делать прогнозы с помощью обученной нейронной сети достаточно просто.
Мы уже видели, как распространять входной шаблон для получения выходного сигнала. Это все, что нам нужно сделать, чтобы сделать прогноз. Мы можем непосредственно использовать выходные значения как вероятность того, что шаблон принадлежит каждому выходному классу.
Возможно, было бы более полезно превратить этот вывод в четкое предсказание класса. Мы можем сделать это, выбрав значение класса с большей вероятностью. Это также называется функция arg max,
Ниже приведена функция с именемпредсказать, ()который реализует эту процедуру. Возвращает индекс в выходных данных сети, который имеет наибольшую вероятность. Предполагается, что значения класса были преобразованы в целые числа, начиная с 0.
# Make a prediction with a network
def predict(network, row):
outputs = forward_propagate(network, row)
return outputs.index(max(outputs))Мы можем соединить это с нашим кодом выше для входного распространения и с нашим небольшим надуманным набором данных, чтобы проверить предсказания с уже обученной сетью. Пример жестко кодирует сеть, обученную на предыдущем шаге.
Полный пример приведен ниже.
from math import exp
# Calculate neuron activation for an input
def activate(weights, inputs):
activation = weights[-1]
for i in range(len(weights)-1):
activation += weights[i] * inputs[i]
return activation
# Transfer neuron activation
def transfer(activation):
return 1.0 / (1.0 + exp(-activation))
# Forward propagate input to a network output
def forward_propagate(network, row):
inputs = row
for layer in network:
new_inputs = []
for neuron in layer:
activation = activate(neuron['weights'], inputs)
neuron['output'] = transfer(activation)
new_inputs.append(neuron['output'])
inputs = new_inputs
return inputs
# Make a prediction with a network
def predict(network, row):
outputs = forward_propagate(network, row)
return outputs.index(max(outputs))
# Test making predictions with the network
dataset = [[2.7810836,2.550537003,0],
[1.465489372,2.362125076,0],
[3.396561688,4.400293529,0],
[1.38807019,1.850220317,0],
[3.06407232,3.005305973,0],
[7.627531214,2.759262235,1],
[5.332441248,2.088626775,1],
[6.922596716,1.77106367,1],
[8.675418651,-0.242068655,1],
[7.673756466,3.508563011,1]]
network = [[{'weights': [-1.482313569067226, 1.8308790073202204, 1.078381922048799]}, {'weights': [0.23244990332399884, 0.3621998343835864, 0.40289821191094327]}],
[{'weights': [2.5001872433501404, 0.7887233511355132, -1.1026649757805829]}, {'weights': [-2.429350576245497, 0.8357651039198697, 1.0699217181280656]}]]
for row in dataset:
prediction = predict(network, row)
print('Expected=%d, Got=%d' % (row[-1], prediction))При выполнении примера выводится ожидаемый результат для каждой записи в наборе обучающих данных, за которым следует четкое предсказание, сделанное сетью.
Это показывает, что сеть достигает 100% точности в этом небольшом наборе данных.
Expected=0, Got=0
Expected=0, Got=0
Expected=0, Got=0
Expected=0, Got=0
Expected=0, Got=0
Expected=1, Got=1
Expected=1, Got=1
Expected=1, Got=1
Expected=1, Got=1
Expected=1, Got=1Теперь мы готовы применить наш алгоритм обратного распространения к реальному набору данных.
6. Набор данных семян пшеницы
В этом разделе применяется алгоритм обратного распространения к набору данных семян пшеницы.
Первым шагом является загрузка набора данных и преобразование загруженных данных в числа, которые мы можем использовать в нашей нейронной сети. Для этого мы будем использовать вспомогательную функциюload_csv ()загрузить файл,str_column_to_float ()преобразовать строковые числа в числа с плавающей запятой иstr_column_to_int ()преобразовать столбец класса в целочисленные значения.
Входные значения различаются по масштабу и должны быть нормализованы в диапазоне от 0 до 1. Обычно рекомендуется нормализовать входные значения в диапазоне выбранной передаточной функции, в данном случае сигмоидальной функции, которая выводит значения в диапазоне от 0 до 1. .dataset_minmax ()а такжеnormalize_dataset ()вспомогательные функции были использованы для нормализации входных значений.
Мы оценим алгоритм с использованием k-кратной перекрестной проверки с 5-кратным увеличением. Это означает, что 201/5 = 40,2 или 40 записей будут в каждом сгибе. Мы будем использовать вспомогательные функцииevaluate_algorithm ()оценить алгоритм с перекрестной проверкой иaccuracy_metric ()рассчитать точность прогнозов.
Новая функция с именемback_propagation ()был разработан для управления приложением алгоритма Backpropagation, сначала инициализируя сеть, обучая ее на наборе обучающих данных, а затем используя обученную сеть, чтобы делать прогнозы на тестовом наборе данных.
Полный пример приведен ниже.
# Backprop on the Seeds Dataset
from random import seed
from random import randrange
from random import random
from csv import reader
from math import exp
# Load a CSV file
def load_csv(filename):
dataset = list()
with open(filename, 'r') as file:
csv_reader = reader(file)
for row in csv_reader:
if not row:
continue
dataset.append(row)
return dataset
# Convert string column to float
def str_column_to_float(dataset, column):
for row in dataset:
row[column] = float(row[column].strip())
# Convert string column to integer
def str_column_to_int(dataset, column):
class_values = [row[column] for row in dataset]
unique = set(class_values)
lookup = dict()
for i, value in enumerate(unique):
lookup[value] = i
for row in dataset:
row[column] = lookup[row[column]]
return lookup
# Find the min and max values for each column
def dataset_minmax(dataset):
minmax = list()
stats = [[min(column), max(column)] for column in zip(*dataset)]
return stats
# Rescale dataset columns to the range 0-1
def normalize_dataset(dataset, minmax):
for row in dataset:
for i in range(len(row)-1):
row[i] = (row[i] - minmax[i][0]) / (minmax[i][1] - minmax[i][0])
# Split a dataset into k folds
def cross_validation_split(dataset, n_folds):
dataset_split = list()
dataset_copy = list(dataset)
fold_size = int(len(dataset) / n_folds)
for i in range(n_folds):
fold = list()
while len(fold) < fold_size:
index = randrange(len(dataset_copy))
fold.append(dataset_copy.pop(index))
dataset_split.append(fold)
return dataset_split
# Calculate accuracy percentage
def accuracy_metric(actual, predicted):
correct = 0
for i in range(len(actual)):
if actual[i] == predicted[i]:
correct += 1
return correct / float(len(actual)) * 100.0
# Evaluate an algorithm using a cross validation split
def evaluate_algorithm(dataset, algorithm, n_folds, *args):
folds = cross_validation_split(dataset, n_folds)
scores = list()
for fold in folds:
train_set = list(folds)
train_set.remove(fold)
train_set = sum(train_set, [])
test_set = list()
for row in fold:
row_copy = list(row)
test_set.append(row_copy)
row_copy[-1] = None
predicted = algorithm(train_set, test_set, *args)
actual = [row[-1] for row in fold]
accuracy = accuracy_metric(actual, predicted)
scores.append(accuracy)
return scores
# Calculate neuron activation for an input
def activate(weights, inputs):
activation = weights[-1]
for i in range(len(weights)-1):
activation += weights[i] * inputs[i]
return activation
# Transfer neuron activation
def transfer(activation):
return 1.0 / (1.0 + exp(-activation))
# Forward propagate input to a network output
def forward_propagate(network, row):
inputs = row
for layer in network:
new_inputs = []
for neuron in layer:
activation = activate(neuron['weights'], inputs)
neuron['output'] = transfer(activation)
new_inputs.append(neuron['output'])
inputs = new_inputs
return inputs
# Calculate the derivative of an neuron output
def transfer_derivative(output):
return output * (1.0 - output)
# Backpropagate error and store in neurons
def backward_propagate_error(network, expected):
for i in reversed(range(len(network))):
layer = network[i]
errors = list()
if i != len(network)-1:
for j in range(len(layer)):
error = 0.0
for neuron in network[i + 1]:
error += (neuron['weights'][j] * neuron['delta'])
errors.append(error)
else:
for j in range(len(layer)):
neuron = layer[j]
errors.append(expected[j] - neuron['output'])
for j in range(len(layer)):
neuron = layer[j]
neuron['delta'] = errors[j] * transfer_derivative(neuron['output'])
# Update network weights with error
def update_weights(network, row, l_rate):
for i in range(len(network)):
inputs = row[:-1]
if i != 0:
inputs = [neuron['output'] for neuron in network[i - 1]]
for neuron in network[i]:
for j in range(len(inputs)):
neuron['weights'][j] += l_rate * neuron['delta'] * inputs[j]
neuron['weights'][-1] += l_rate * neuron['delta']
# Train a network for a fixed number of epochs
def train_network(network, train, l_rate, n_epoch, n_outputs):
for epoch in range(n_epoch):
for row in train:
outputs = forward_propagate(network, row)
expected = [0 for i in range(n_outputs)]
expected[row[-1]] = 1
backward_propagate_error(network, expected)
update_weights(network, row, l_rate)
# Initialize a network
def initialize_network(n_inputs, n_hidden, n_outputs):
network = list()
hidden_layer = [{'weights':[random() for i in range(n_inputs + 1)]} for i in range(n_hidden)]
network.append(hidden_layer)
output_layer = [{'weights':[random() for i in range(n_hidden + 1)]} for i in range(n_outputs)]
network.append(output_layer)
return network
# Make a prediction with a network
def predict(network, row):
outputs = forward_propagate(network, row)
return outputs.index(max(outputs))
# Backpropagation Algorithm With Stochastic Gradient Descent
def back_propagation(train, test, l_rate, n_epoch, n_hidden):
n_inputs = len(train[0]) - 1
n_outputs = len(set([row[-1] for row in train]))
network = initialize_network(n_inputs, n_hidden, n_outputs)
train_network(network, train, l_rate, n_epoch, n_outputs)
predictions = list()
for row in test:
prediction = predict(network, row)
predictions.append(prediction)
return(predictions)
# Test Backprop on Seeds dataset
seed(1)
# load and prepare data
filename = 'seeds_dataset.csv'
dataset = load_csv(filename)
for i in range(len(dataset[0])-1):
str_column_to_float(dataset, i)
# convert class column to integers
str_column_to_int(dataset, len(dataset[0])-1)
# normalize input variables
minmax = dataset_minmax(dataset)
normalize_dataset(dataset, minmax)
# evaluate algorithm
n_folds = 5
l_rate = 0.3
n_epoch = 500
n_hidden = 5
scores = evaluate_algorithm(dataset, back_propagation, n_folds, l_rate, n_epoch, n_hidden)
print('Scores: %s' % scores)
print('Mean Accuracy: %.3f%%' % (sum(scores)/float(len(scores))))Была построена сеть с 5 нейронами в скрытом слое и 3 нейронами в выходном слое. Сеть была подготовлена для 500 эпох с темпом обучения 0,3. Эти параметры были найдены с небольшой пробой и ошибкой, но вы можете сделать это намного лучше.
При выполнении примера выводится средняя точность классификации для каждого сгиба, а также средняя производительность по всем сгибам.
Вы можете видеть, что обратное распространение и выбранная конфигурация достигли средней точности классификации около 93%, что значительно лучше, чем алгоритм нулевого правила, который немного лучше, чем точность 28%.
Scores: [92.85714285714286, 92.85714285714286, 97.61904761904762, 92.85714285714286, 90.47619047619048]
Mean Accuracy: 93.333%расширения
В этом разделе перечислены расширения к учебнику, которые вы можете изучить.
- Параметры алгоритма настройки, Попробуйте большие или меньшие сети, обученные дольше или короче. Посмотрите, сможете ли вы улучшить производительность набора данных seed.
- Дополнительные методы, Поэкспериментируйте с различными методами инициализации веса (такими как небольшие случайные числа) и различными передаточными функциями (такими как tanh).
- Больше слоев, Добавьте поддержку для большего количества скрытых слоев, обученных так же, как один скрытый слой, используемый в этом руководстве.
- регрессия, Измените сеть так, чтобы в выходном слое был только один нейрон, и чтобы было предсказано реальное значение. Выберите регрессионный набор данных для практики. Линейная передаточная функция может использоваться для нейронов в выходном слое, или выходные значения выбранного набора данных могут быть масштабированы до значений между 0 и 1.
- Пакетный градиентный спуск, Измените процедуру обучения с онлайн на пакетный градиентный спуск и обновляйте веса только в конце каждой эпохи.
Вы пробовали какие-либо из этих расширений?
Поделитесь своим опытом в комментариях ниже.
Обзор
В этом руководстве вы узнали, как реализовать алгоритм обратного распространения с нуля.
В частности, вы узнали:
- Как переслать распространение входа для расчета выхода сети.
- Как обратно распространять ошибки и обновлять вес сети.
- Как применить алгоритм обратного распространения к реальному набору данных.
У вас есть вопросы?
Задайте свои вопросы в комментариях ниже, и я сделаю все возможное, чтобы ответить.