К физическим
источникам ошибок, влияющих на изображения
аэрофотоснимка, относятся деформация
фотоматериала, невыравнивание фильма
в аэрофотоаппарате, дисторсия объектива,
атмосферная рефракция, кривизна
Земли и смаз изображения.
Деформация
фотоматериала (фотопленки и фотобумаги)
возникает главным образом в процессе
фотографической обработки. Причины
деформации изучаются в курсе фотографии.
Различают
два вида деформации фотоматериала:
систематическую и случайную.
Систематическая
деформация вызывает
аффинное преобразование снимка.
Например, квадрат в результате
систематической деформации может
остаться квадратом, изменив только
размер (равномерная деформация), или
принять форму прямоугольника (неравномерная
деформация), ромба (деформация сдвига),
параллелограмма (неравномерная деформация
со сдвигом). Равномерная деформация
легко учитывается при фотограмметрических
работах. Остальные виды систематической
деформации учесть сложно и практически
не всегда возможно. Фотопленка имеет
главным образом неравномерную деформацию,
которая характеризуется разностью
величин деформации вдоль и поперек
фильма. Обычно она не превышает 30 мкм
на протяжении 90 мм.
Случайная
деформация не
подчиняется законам аффинного
преобразования. Для лучших сортов
фотопленки на ацетатной основе она
не больше 15 мкм и 6 мкм для пленки на
малодеформи-рующейся основе в пределах
квадрата 20×20 см. Одна из причин случайной
деформации — неоднородность строения
подложки.
Деформация
обычной фотобумаги в 2—3 раза больше
деформации фотопленки. Фотобумага
с металлической прослойкой и фотопластинки
практически не деформируются.
Деформацию
фотоматериала необходимо учитывать в
тех случаях, когда ее влияние выходит
за пределы ошибок измерения снимков.
Для
учета равномерной деформации фотоматериала
измеренные координаты х
и у точки
снимка трансформируют по формулам
![]()
где
х’,
у’—
исправленные за деформацию координаты
точки снимка; а0,
bo,
a,
b
—
коэффициенты. Зная точные значения х’,
у’ координат
меток или перекрестий контрольной сетки
и измерив координаты х
и
у
их
изображений на снимке, составляют
уравнения (75). Решив эти уравнения,
находят коэффициенты и вычисляют
исправленные координаты любой точки
снимка. Для определения коэффициентов
в данном случае необходимы две метки
или два перекрестия контрольной сетки.
Влияние
неравномерной деформации фотоматериала
учитывается полиномами
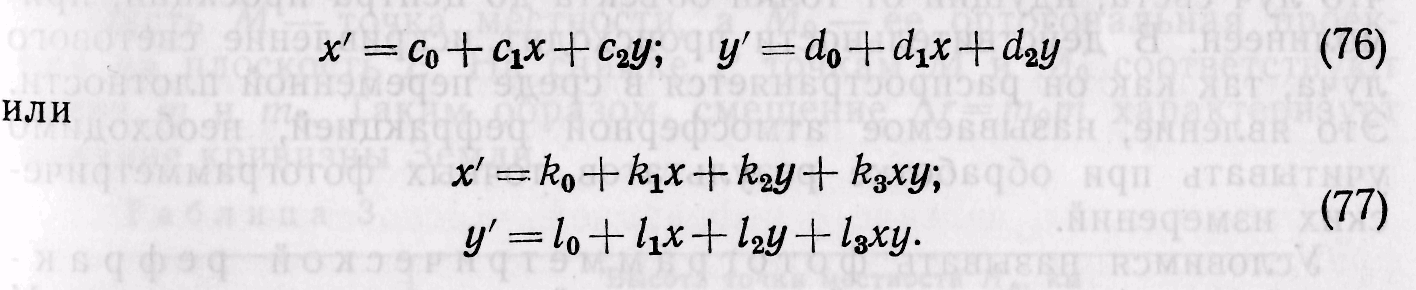
В
этом случае необходимо иметь не менее
трех или четырех точек с известными
координатами х’
и
у’.
При
наличии избыточного количества точек
с известными координатами х’
и
у’
задача
определения коэффициентов решается
по способу наименьших квадратов.
Влияние
ошибки выравнивания фотопленки в
плоскости прикладной рамки фотокамеры
показано на рис. 39, где а’
и
а
—
изображения точки объекта на плоскости
прикладной рамки Р
и
поверхности эмульсионного слоя; b
—
основание перпендикуляра,
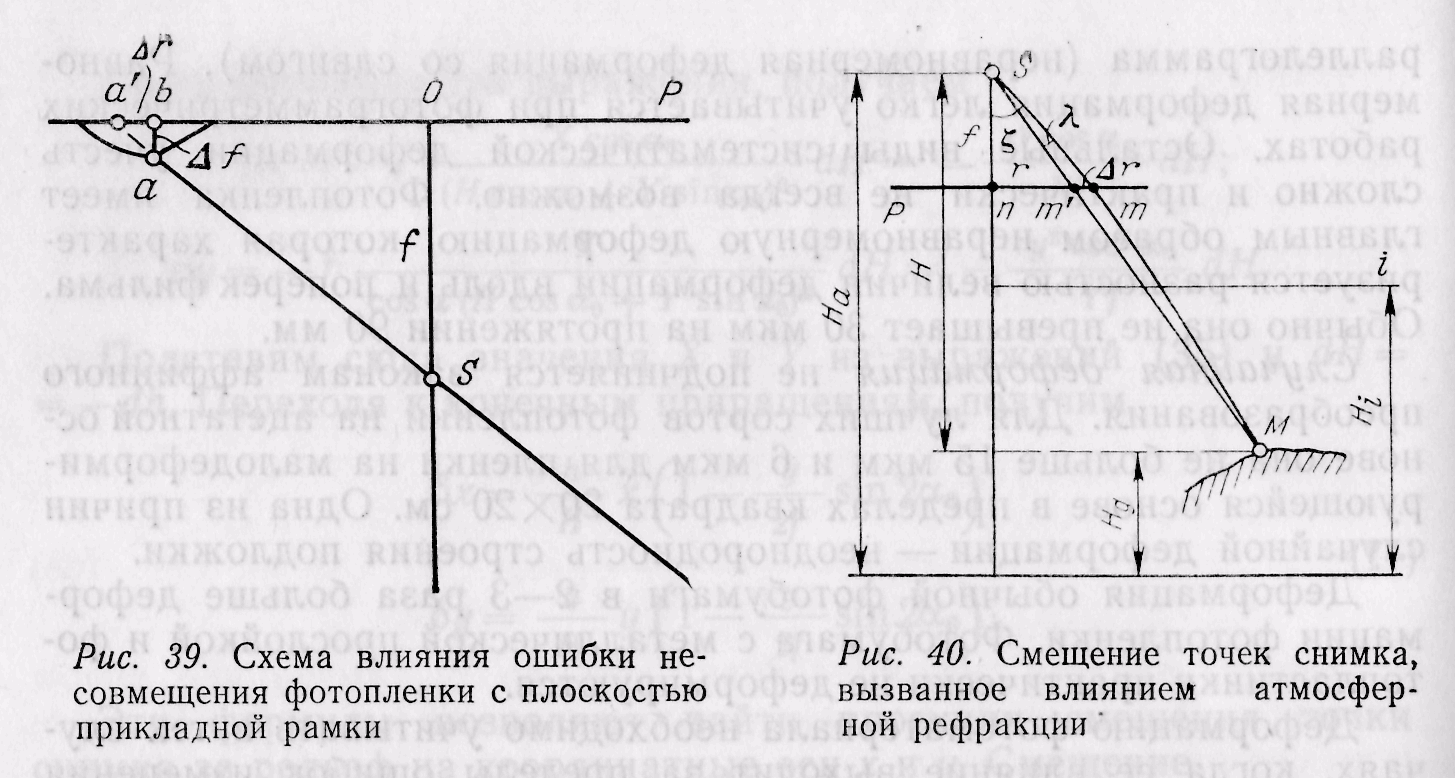
опущенного
из точки а
на
плоскость Р.
Пусть
оа’
=r
и
а’b
=Δ r. Тогда
Эта
формула характеризует искажение
радиуса-вектора точки снимка, обусловленное
отклонением Δƒ поверхности фотопленки
от плоскости прикладной рамки.
Если
r=f=100
мм, Δг=10 мкм, то Δƒ=10 мкм. Отсюда следует,
что выравнивание фотопленки должно
выполняться с высокой точностью.
Влияние
дисторсии объектива фотокамеры
рассмотрено в § 5. Фотограмметрическая
дисторсия объективов, используемых для
измерительных целей, не превышает 30
мкм. Эти искажения являются
систематическими и могут быть учтены
при обработке снимков.
При
выводе основных формул фотограмметрии
предполагается, что луч света, идущий
от точки объекта до центра проекции,
прямолинеен. В действительности
происходит искривление светового луча,
так как он распространяется в среде
переменной плотности. Это явление,
называемое атмосферной рефракцией,
необходимо учитывать при обработке
результатов точных фотограмметрических
измерений.
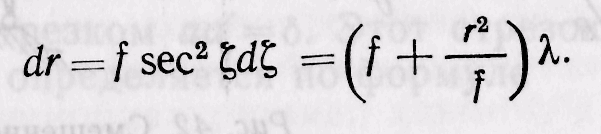
Условимся
называть фотограмметрической рефракцией
угол между прямой, проходящей через
точку местности М
(рис.
40) и центр проекции S,
и
касательной к световому лучу в точке
S.
Рефракцию
можно найти по формуле
![]()
где Н
= На—Hg — высота фотографирования над
точкой местности М; ζ— зенитное
расстояние; Ηi;— абсолютная высота слоя
воздуха i; Hg — высота точки местности:
dδ — изменение плотности атмосферы.
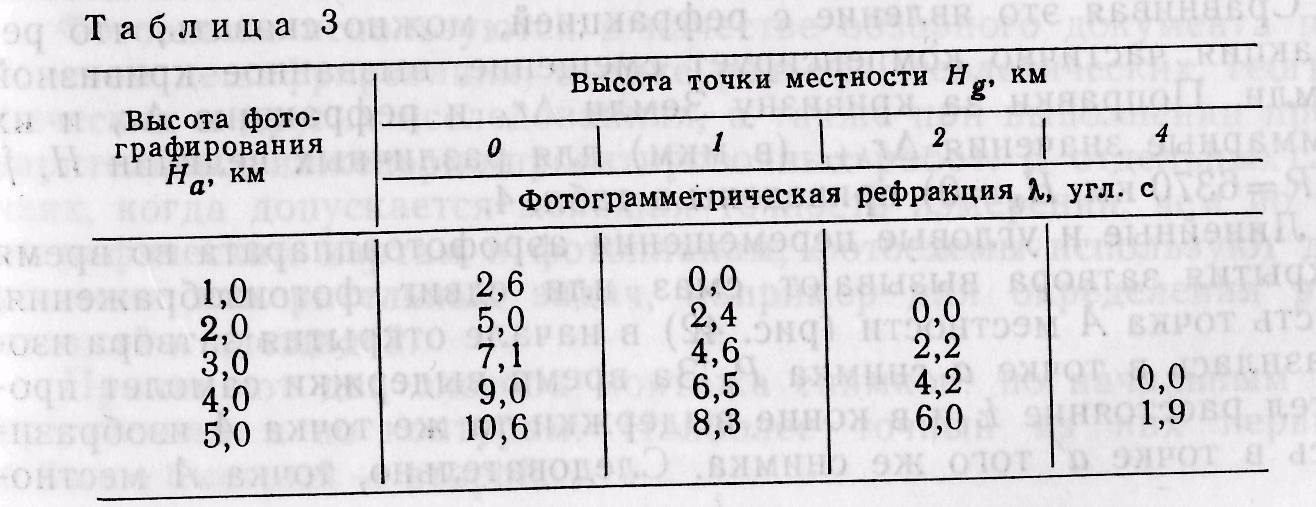
В
соответствии с формулой (79) составлена
табл. 3 величин фотограмметрической
рефракции для зенитного расстояния
ζ=45° и различных значений высот На
и
Hg.
Рефракция
для других зенитных расстояний получается
путем умножения табличных значений на
tgζ.
Смещение
точки снимка, вызванное рефракцией,
находится в вертикальной плоскости,
проходящей через центр проекции S
и точку местности М,
и
приводит к увеличению радиуса-вектора
r
=
пт’ (см.
рис. 40).
Для
горизонтального снимка r
= ftgζ.
Отсюда
Следовательно,
поправки к величинам r,
х, у точки
горизонтального снимка за влияние
рефракции получим по формулам
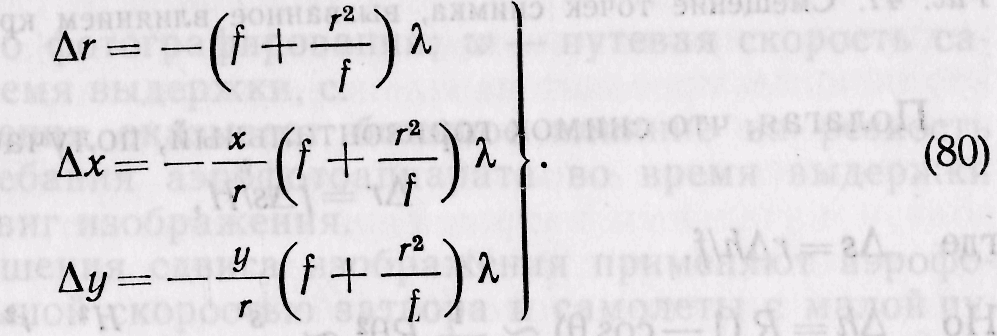
Эти
формулы можно применять и для плановых
снимков, так как углы наклона их малы.
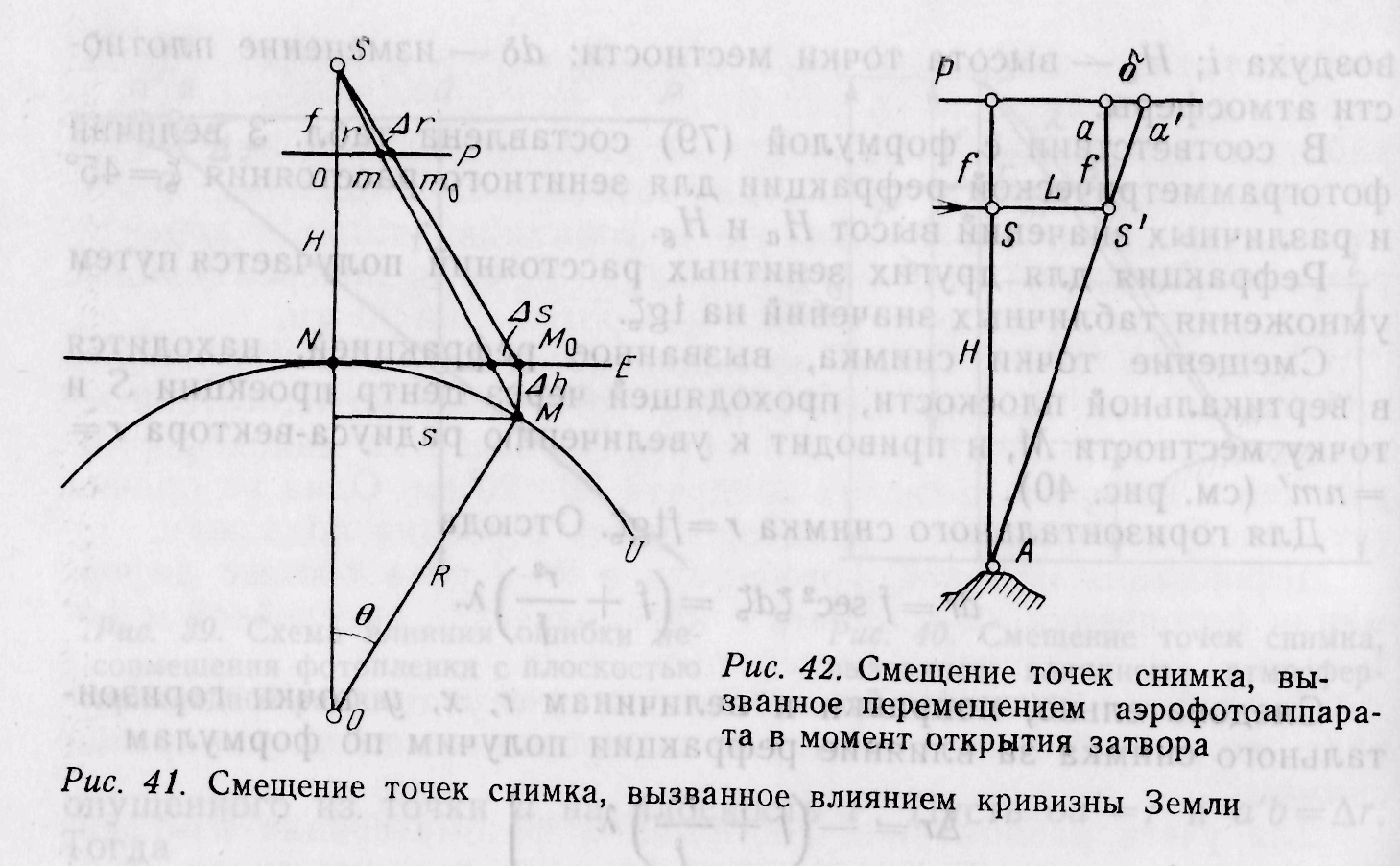
Рассмотрим
влияние кривизны Земли на смещение
точек снимка (рис. 41). При решении некоторых
фотограмметрических задач местность
принимают за горизонтальную плоскость
Е,
проходящую
через точку N
высоты
фотографирования Н.
Однако
более точное представление о местности
дает сферическая поверхность U
с
радиусом R.
Пусть
М
—
точка местности, а Мо
— ее ортогональная проекция на
плоскость Е.
На
снимке Р
точкам
М
и
Мо
соответствуют
точки т
и
т0.
Таким
образом, смещение Δr=тот
характеризует
влияние кривизны Земли.
Полагая,
что снимок горизонтальный, получаем
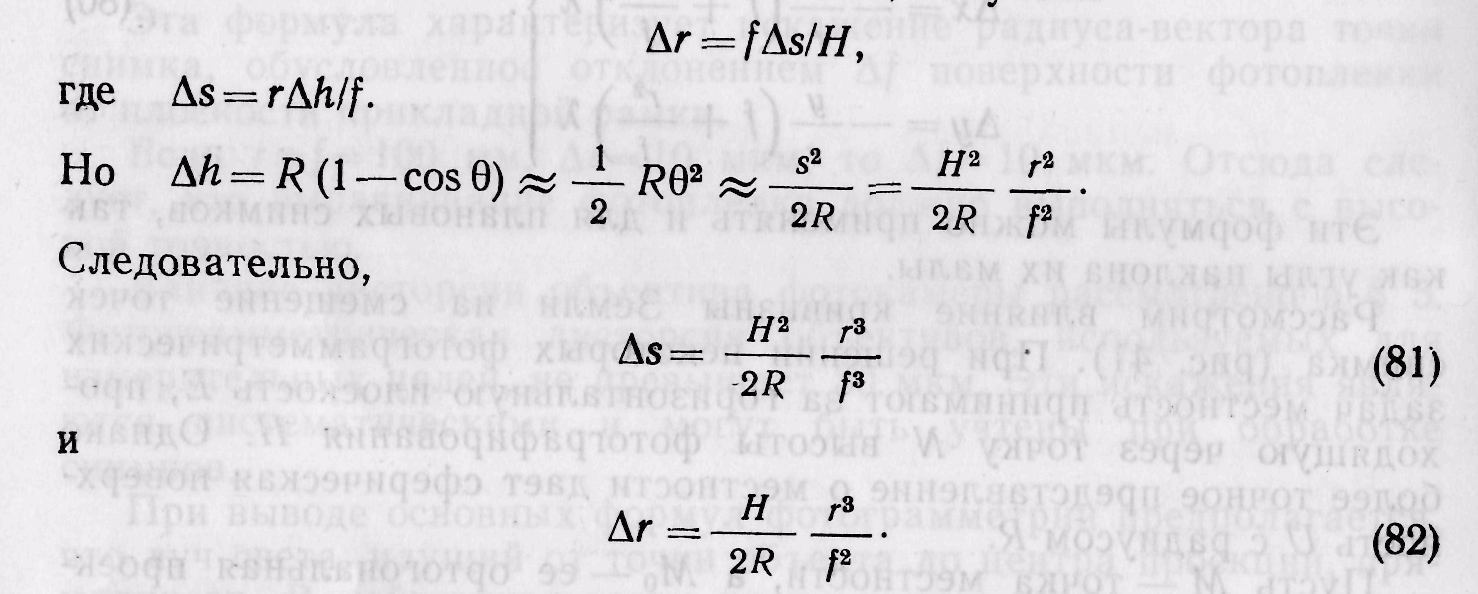
Смещение
точки снимка, вызванное кривизной Земли,
направлено к центру снимка и приводит
к уменьшению радиуса-вектора r.
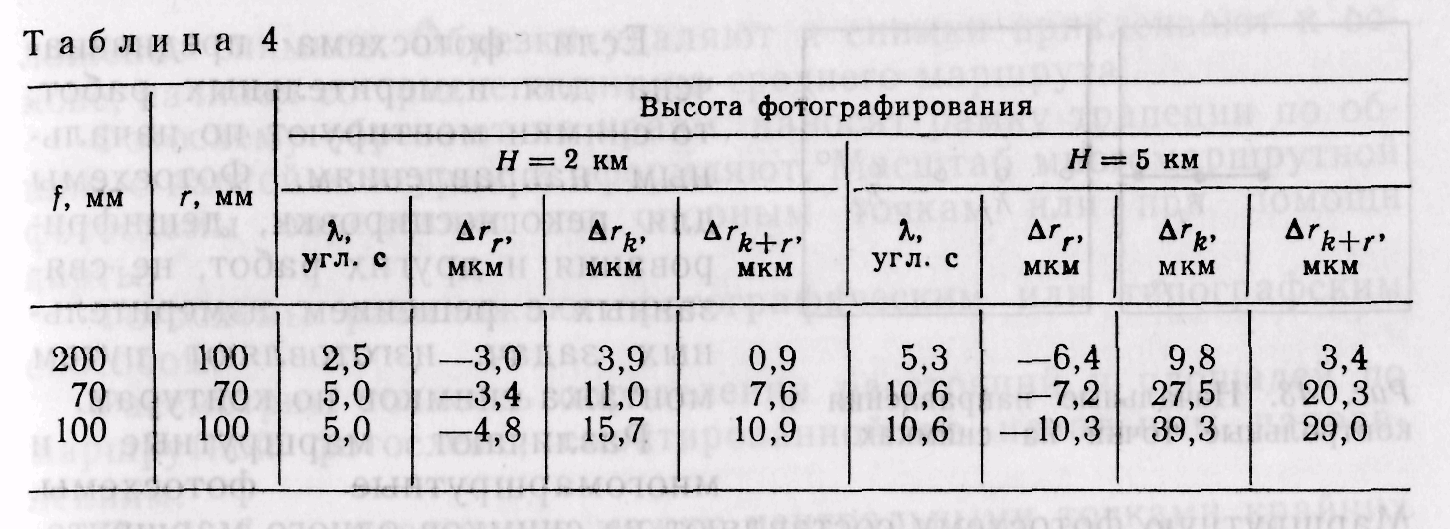
Сравнивая
это явление с рефракцией, можно сказать,
что рефракция частично компенсирует
смещение, вызванное кривизной Земли.
Поправки за кривизну Земли Ark
и
рефракцию Агг
и их суммарные значения Ark+r
(в
мкм) для различных величин Н,ƒ,r
(R=6370
км, Hg=0)
приведены
в табл. 4.
Линейные
и угловые перемещения аэрофотоаппарата
во время открытия затвора вызывают смаз
или сдвиг фотоизображения. Пусть точка
А
местности
(рис. 42) в начале открытия затвора
изобразилась в точке а
снимка
Р.
За
время выдержки самолет пролетел
расстояние L
и
в конце выдержки та же точка А
изобразилась
в точке а’
того
же снимка. Следовательно, точка А
местности
изобразилась отрезком аа’
=δ. Этот
отрезок называется сдвигом изображения
и определяется по формуле

где
f
:
Η— масштаб фотографирования; ω
—
путевая скорость самолета, м/с; t
—-
время выдержки, с.
Сдвиг
изображения оказывает большое влияние
на резкость изображения. Колебания
аэрофотоаппарата во время выдержки
тоже вызывают сдвиг изображения.
С
целью уменьшения сдвига изображения
применяют Аэрофотоаппараты с большой
скоростью затвора и самолеты с малой
путевой скоростью.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

Лекция 8 Физические источники ошибок аэрофотоснимка. Трансформирование аэрофотоснимков. Цель и способы трансформирования аэрофотоснимков. Геометрические и оптические условия фототрансформирования.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Погрешности снимка условно можно разделить на две группы: первая вызывает смещение изображений точек от центральной проекции, вторая — приводит к снижению качества снимков, и, следовательно, к ухудшению их измерительных свойств. К группе источников ошибок, вызывающих искажение центральной проекции, относятся атмосферная рефракция, механические и оптические недостатки камеры аэрофотоаппарата, деформация фотоплёнки, клинообразность светофильтра и др. Рассмотрим перечисленные источники ошибок более подробно. Атмосферная рефракция. Искривление хода световых лучей в пространстве вследствие влияния среды переменной плотности приводит к радиальному смещению изображений точек в направлении от точки надира.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Смещения δr увеличиваются пропорционально третьей степени от r, т. е. по такому же закону, как из-за кривизны Земли, но знаки у них противоположные. Следовательно, рефракция частично компенсирует смещение, вызванное кривизной Земли. Отклонение фактической атмосферы на момент фотографирования от стандартной, а также пренебрежение в формулах для расчета поправок за наклон снимков, рельефом местности и кривизной Земли приводят к остаточной ошибке измеренных координат точек примерно ± 2 мкм. Турбулентность воздушных слоёв вблизи съёмочного объектива вызывает дополнительное искажение координат точек снимка. Радиальное смещение точек на краю снимка по этой причине может достигать ± 5 мкм. При наземной стереофототопографической съемке поправки за кривизну Земли и вертикальную рефракцию вводятся непосредственно в высоты точек, определенные по снимкам.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Условия центрального проектирования не выполняются также из-за механических и оптических недостатков аэрокамеры. Для каждого снимка существуют погрешности внутреннего ориентирования: смещения снимка по координатным осям относительно центра проекции S; ошибки фокусного расстояния f; ошибки перпендикулярности плоскости изображения Р к главному лучу камеры; ошибка вращения снимка вокруг оси камеры. В случае плановой съёмки сравнительно равнинной местности аэрокамерой, калиброванной по стандартной методике, перечисленные ошибки в основном компенсируются в процессе обработки модели. В случае перспективной аэросъёмки или плановой аэросъёмки горной местности эта компенсация возможна лишь частично.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Дисторсия объектива аэрофотоаппарата это один из основных источников погрешностей, приводящих к искажению снимка (к отклонению от центральной проекции). Обычно ее подразделяют на радиальную и тангенциальную. Они в свою очередь бывают систематическими и случайными. Систематическая дисторсия объектива вызывает смещение Δr точек относительно идеального положения по радиальным направлениям, проходящим через главную точку снимка. Величина Δr постоянна для точек, расположенных на окружности радиуса r. Случайная радиальная дисторсия может быть определена как дифференциальное смещение точки изображения, которое остаётся после устранения систематической радиальной дисторсии. Дисторсия объектива аэрофотоаппарата устанавливается, как правило, в процессе определения элементов внутреннего ориентирования (калибровки камеры). В паспорте аэрофотоаппарата ее обычно приводят в виде табличных данных по полю снимка.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Современные объективы камер аэрофотоаппаратов имеют дисторсию от 5 до 60 мкм. Однако, отличие температурных и атмосферных условий в момент фотографирования от лабораторных приводит к тому, что фактическая дисторсия не соответствует той, что получена в процессе калибровки. Разработанные методы позволяют учесть влияние радиальной дисторсии с погрешностью ± 2 мкм, а тангенциальной ± 5 мкм. Деформация фотоплёнки. Современные аэрофотоаппараты позволяют получать фотографическое изображение местности либо на фотоплёнке (что гораздо чаще), либо на стеклянных пластинках. Фотоплёнка, как носитель эмульсии, деформируется от времени, изменения температуры, влажности и условий фотообработки.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Деформацию фотоплёнки подразделяют: на равномерную, неравномерную и случайную. Равномерная деформация характеризуется смещением точек изображения, которое уменьшается или увеличивается пропорционально радиальному расстоянию r от центра снимка, т. е. приводит к изменению масштаба снимка. Этот вид деформации легко учитывается при обработке снимков. Неравномерная деформация приводит к тому, что размеры снимка вдоль фильма и в поперечном направлении изменяются на разные величины. Однако это различие, как правило, не превышает 0. 3 %. Влияние неравномерной деформации на смещение точек может быть учтено только при аналитических способах обработки снимков. Существенное значение имеют случайная деформация плёнки и погрешности её выравнивания в плоскость. Случайные деформации фотоплёнки вызывают смещение точек изображения практически в произвольном направлении. Они обусловлены эластичными свойствами фотоплёнки и могут достигать величин порядка 10 -20 мкм. Эти деформации подчиняются определённым законам эластичности, которые не соответствуют закону нормального распределения.

ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА Случайные ошибки выравнивания фотоплёнки в плоскость во время экспозиции также приводят к искажениям изображения. Сравнить это можно с изменением фокусного расстояния в точке, где произошло отклонение от плоскости прикладной рамки. Поэтому величину смещения можно оценить по формуле: где r — расстояние от центра прикладной рамки. Из формулы видно, что ошибка δ особенно сказывается при аэрофотосъёмке короткофокусными аэрофотоаппаратами, значит при фотографировании необходимо, чтобы фотоплёнка была абсолютно плоской в момент экспозиции. Поэтому при конструировании топографических аэрофотоаппаратов большое внимание уделяется разработке механизмов выравнивания плёнки в плоскость.

К физическим
источникам ошибок, влияющих на изображения
аэрофотоснимка, относятся деформация
фотоматериала, невыравнивание фильма
в аэрофотоаппарате, дисторсия объектива,
атмосферная рефракция, кривизна
Земли и смаз изображения.
Деформация
фотоматериала (фотопленки и фотобумаги)
возникает главным образом в процессе
фотографической обработки. Причины
деформации изучаются в курсе фотографии.
Различают
два вида деформации фотоматериала:
систематическую и случайную.
Систематическая
деформация вызывает
аффинное преобразование снимка.
Например, квадрат в результате
систематической деформации может
остаться квадратом, изменив только
размер (равномерная деформация), или
принять форму прямоугольника (неравномерная
деформация), ромба (деформация сдвига),
параллелограмма (неравномерная деформация
со сдвигом). Равномерная деформация
легко учитывается при фотограмметрических
работах. Остальные виды систематической
деформации учесть сложно и практически
не всегда возможно. Фотопленка имеет
главным образом неравномерную деформацию,
которая характеризуется разностью
величин деформации вдоль и поперек
фильма. Обычно она не превышает 30 мкм
на протяжении 90 мм.
Случайная
деформация не
подчиняется законам аффинного
преобразования. Для лучших сортов
фотопленки на ацетатной основе она
не больше 15 мкм и 6 мкм для пленки на
малодеформи-рующейся основе в пределах
квадрата 20×20 см. Одна из причин случайной
деформации — неоднородность строения
подложки.
Деформация
обычной фотобумаги в 2—3 раза больше
деформации фотопленки. Фотобумага
с металлической прослойкой и фотопластинки
практически не деформируются.
Деформацию
фотоматериала необходимо учитывать в
тех случаях, когда ее влияние выходит
за пределы ошибок измерения снимков.
Для
учета равномерной деформации фотоматериала
измеренные координаты х
и у точки
снимка трансформируют по формулам
![]()
где
х’,
у’—
исправленные за деформацию координаты
точки снимка; а0,
bo,
a,
b
—
коэффициенты. Зная точные значения х’,
у’ координат
меток или перекрестий контрольной сетки
и измерив координаты х
и
у
их
изображений на снимке, составляют
уравнения (75). Решив эти уравнения,
находят коэффициенты и вычисляют
исправленные координаты любой точки
снимка. Для определения коэффициентов
в данном случае необходимы две метки
или два перекрестия контрольной сетки.
Влияние
неравномерной деформации фотоматериала
учитывается полиномами
В
этом случае необходимо иметь не менее
трех или четырех точек с известными
координатами х’
и
у’.
При
наличии избыточного количества точек
с известными координатами х’
и
у’
задача
определения коэффициентов решается
по способу наименьших квадратов.
Влияние
ошибки выравнивания фотопленки в
плоскости прикладной рамки фотокамеры
показано на рис. 39, где а’
и
а
—
изображения точки объекта на плоскости
прикладной рамки Р
и
поверхности эмульсионного слоя; b
—
основание перпендикуляра,
опущенного
из точки а
на
плоскость Р.
Пусть
оа’
=r
и
а’b
=Δ r. Тогда
Эта
формула характеризует искажение
радиуса-вектора точки снимка, обусловленное
отклонением Δƒ поверхности фотопленки
от плоскости прикладной рамки.
Если
r=f=100
мм, Δг=10 мкм, то Δƒ=10 мкм. Отсюда следует,
что выравнивание фотопленки должно
выполняться с высокой точностью.
Влияние
дисторсии объектива фотокамеры
рассмотрено в § 5. Фотограмметрическая
дисторсия объективов, используемых для
измерительных целей, не превышает 30
мкм. Эти искажения являются
систематическими и могут быть учтены
при обработке снимков.
При
выводе основных формул фотограмметрии
предполагается, что луч света, идущий
от точки объекта до центра проекции,
прямолинеен. В действительности
происходит искривление светового луча,
так как он распространяется в среде
переменной плотности. Это явление,
называемое атмосферной рефракцией,
необходимо учитывать при обработке
результатов точных фотограмметрических
измерений.
Условимся
называть фотограмметрической рефракцией
угол между прямой, проходящей через
точку местности М
(рис.
40) и центр проекции S,
и
касательной к световому лучу в точке
S.
Рефракцию
можно найти по формуле
![]()
где Н
= На—Hg — высота фотографирования над
точкой местности М; ζ— зенитное
расстояние; Ηi;— абсолютная высота слоя
воздуха i; Hg — высота точки местности:
dδ — изменение плотности атмосферы.
В
соответствии с формулой (79) составлена
табл. 3 величин фотограмметрической
рефракции для зенитного расстояния
ζ=45° и различных значений высот На
и
Hg.
Рефракция
для других зенитных расстояний получается
путем умножения табличных значений на
tgζ.
Смещение
точки снимка, вызванное рефракцией,
находится в вертикальной плоскости,
проходящей через центр проекции S
и точку местности М,
и
приводит к увеличению радиуса-вектора
r
=
пт’ (см.
рис. 40).
Для
горизонтального снимка r
= ftgζ.
Отсюда
Следовательно,
поправки к величинам r,
х, у точки
горизонтального снимка за влияние
рефракции получим по формулам
Эти
формулы можно применять и для плановых
снимков, так как углы наклона их малы.
Рассмотрим
влияние кривизны Земли на смещение
точек снимка (рис. 41). При решении некоторых
фотограмметрических задач местность
принимают за горизонтальную плоскость
Е,
проходящую
через точку N
высоты
фотографирования Н.
Однако
более точное представление о местности
дает сферическая поверхность U
с
радиусом R.
Пусть
М
—
точка местности, а Мо
— ее ортогональная проекция на
плоскость Е.
На
снимке Р
точкам
М
и
Мо
соответствуют
точки т
и
т0.
Таким
образом, смещение Δr=тот
характеризует
влияние кривизны Земли.
Полагая,
что снимок горизонтальный, получаем
Смещение
точки снимка, вызванное кривизной Земли,
направлено к центру снимка и приводит
к уменьшению радиуса-вектора r.
Сравнивая
это явление с рефракцией, можно сказать,
что рефракция частично компенсирует
смещение, вызванное кривизной Земли.
Поправки за кривизну Земли Ark
и
рефракцию Агг
и их суммарные значения Ark+r
(в
мкм) для различных величин Н,ƒ,r
(R=6370
км, Hg=0)
приведены
в табл. 4.
Линейные
и угловые перемещения аэрофотоаппарата
во время открытия затвора вызывают смаз
или сдвиг фотоизображения. Пусть точка
А
местности
(рис. 42) в начале открытия затвора
изобразилась в точке а
снимка
Р.
За
время выдержки самолет пролетел
расстояние L
и
в конце выдержки та же точка А
изобразилась
в точке а’
того
же снимка. Следовательно, точка А
местности
изобразилась отрезком аа’
=δ. Этот
отрезок называется сдвигом изображения
и определяется по формуле
где
f
:
Η— масштаб фотографирования; ω
—
путевая скорость самолета, м/с; t
—-
время выдержки, с.
Сдвиг
изображения оказывает большое влияние
на резкость изображения. Колебания
аэрофотоаппарата во время выдержки
тоже вызывают сдвиг изображения.
С
целью уменьшения сдвига изображения
применяют Аэрофотоаппараты с большой
скоростью затвора и самолеты с малой
путевой скоростью.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
- Суть аэрофотосъемки
- Виды аэрофотосъемки и их особенности
- Процесс стрельбы
- Оценка качества аэрофотоснимков
- Расположение и оснащение самолетов и вертолетов
- Сущность спутниковых снимков
- Погодные условия
- Масштаб аэрофотоснимков
- Вывод:
| Предмет: | Геодезия |
| Тип работы: | Курсовая работа |
| Язык: | Русский |
| Дата добавления: | 15.03.2019 |
- Данный тип работы не является научным трудом, не является готовой выпускной квалификационной работой!
- Данный тип работы представляет собой готовый результат обработки, структурирования и форматирования собранной информации, предназначенной для использования в качестве источника материала для самостоятельной подготовки учебной работы.
Если вам тяжело разобраться в данной теме напишите мне в whatsapp разберём вашу тему, согласуем сроки и я вам помогу!
По этой ссылке вы сможете найти много готовых курсовых работ по геодезии:
Посмотрите похожие темы возможно они вам могут быть полезны:
Введение:
Термин аэрофотосъемка относится к фотографированию местности с достаточно большой высоты с использованием специального оборудования. Это оборудование фиксируется на самолете, вертолете, дирижабле или на искусственном спутнике Земли. Особенность аэрофотокамер заключается в том, что они способны фотографировать как в горизонтальном положении, так и в наклонном положении, и даже в тот момент, когда объектив вращается. В этом случае в процессе съемки чаще всего используется однообъективная камера, но в некоторых случаях также используется многообъективная камера, которая может значительно увеличить область, которая может быть покрыта одним изображением.
Можно с уверенностью сказать, что сегодня аэрофотосъемка широко используется в самых разных отраслях промышленности. Панорамные снимки, сделанные с помощью аэрофотокамер, могут быть необходимы владельцам недвижимости и земельным участкам, риэлторам или архитекторам. По данным, полученным с помощью аэрофотосъемки, вы можете в полной мере оценить все достоинства и недостатки того или иного района. Эта информация может быть более чем полезной для будущего развития, позволяя вам предоставить полную информацию обо всех строительных проектах и их местонахождении на месте. Также все данные, полученные в процессе аэрофотосъемки, позволяют рассчитать размеры всех зданий и сооружений, а также получить точные данные о физическом состоянии определенных объектов.
Суть аэрофотосъемки
Аэрофотосъемка — это комплекс мероприятий, который включает в себя различные процессы от фотографирования земной поверхности с летающего самолета до получения аэрофотоснимков, фотографий или фотографических планов захваченного района.
Оно включает:
- подготовительные мероприятия, заключающиеся в изучении местности, которая подлежит фотографированию, подготовке карт, разработке маршрутов полета самолета и расчете элементов аэрофотосъемки;
- сама полетная фотография или фотографирование земной поверхности с помощью аэрофотокамер;
- фотолабораторная работа по проявлению снятой пленки и изготовлению позитивов;
- геодезические работы по созданию геодезической базы на земле, что необходимо для исправления искажений аэрофотоснимков, возникающих при аэрофотосъемке, географической привязке и для составления фотографий и фотографических планов;
- фотограмметрическая работа, которая проводится как в полевых условиях, так и в офисные периоды, и связана с обработкой аэрофотоснимков для составления планов и карт снимаемого участка.
Все эти процессы тесно связаны друг с другом и частично перекрываются. Аэрофотосъемка каждого объекта должна проводиться одной и той же организацией от начала до доставки конечного продукта. В результате этих работ изготавливаются контактные отпечатки, блок-распечатки аэрофотоснимков, фотографии или фотографические планы, составленные в соответствии с геодезической базой. Все эти так называемые аэрофотоснимки используются в будущем для решения ряда вопросов в области лесного хозяйства и лесной промышленности.
Виды аэрофотосъемки и их особенности
Типы аэрофотосъемки отличаются друг от друга несколькими способами. Фотографирование земной поверхности с самолета может происходить в разных положениях главной оптической оси камеры аэрофотоаппарата. В зависимости от его пространственного положения различают следующие виды аэрофотосъемки: горизонтальные, плановые и наклонные (перспективные). Горизонтальный означает такую аэрофотосъемку, в которой основная оптическая ось аэрофотокамеры занимает вертикальное положение (b = 0), а отрицательная плоскость строго горизонтальна. Если в момент фотографирования основная оптическая ось камеры аэрофотоаппарата отклоняется от отвеса в среднем на 1,0-1,5 °, но не более чем на 3,0-5,0 °, то такая аэрофотосъемка называется плановой. Фотосъемка с самолета с наклонной позицией главной оптической оси аэрофотоаппарата от отвеса под углами, превышающими 10 °, называется наклонной или перспективной аэрофотосъемкой.
В случае, когда естественный горизонт изображен на аэрофотосъемке, аэрофотосъемка будет перспективной с горизонтом. Кроме того, возможна также плановая и перспективная аэрофотосъемка, суть которой заключается в том, что при полете по одному и тому же маршруту с помощью специальных аэрофотосъемок одновременно делаются как плановые, так и перспективные аэрофотосъемки. В зависимости от характера покрытия местности аэрофотоснимками, аэрофотосъемка делится на обычную, маршрутную и непрерывную. Обычная аэрофотосъемка — это фотосъемка отдельных объектов местности (например, горения, ветров, хранилищ древесины, лесных массивов, рафтинга и т. д.) С одиночными или парными изображениями, соединенными перекрытием. Маршрутная аэрофотосъемка называется аэрофотосъемкой участка полосы вдоль определенного маршрута от самолета. В зависимости от объекта аэрофотосъемки, маршруты полета могут быть прямыми (несколько кварталов леса) или изогнутыми (вдоль русла реки). При такой аэрофотосъемке достигается перекрытие между изображениями на маршруте, достигая 56-60%; это называется продольным перекрытием. Маршрутная аэрофотосъемка используется для транспортировки леса, мелиорации и других работ, выполняемых в узкой полосе местности. Он создается путем прокладки нескольких прямых и параллельных маршрутов, которые взаимно перекрываются. При таком типе аэрофотосъемки в дополнение к продольному перекрытию между изображениями на маршрутах должно наблюдаться указанное перекрытие между изображениями смежных маршрутов полета, называемое поперечным перекрытием; обычно оно не превышает 30-40%.
По методу последующей фотограмметрической обработки аэрофотоснимков и изготовления конечного продукта различают три типа аэрофотосъемки:
- Контурная аэрофотосъемка, в результате которой получается только контурный план местности.
- Комбинированная аэрофотосъемка, при которой топографический план местности создается с использованием аэрофотоснимков, а местность изображается на нем горизонтальными и обычными знаками в результате полевых топографических и геодезических съемок, в основном с использованием вертикальной съемки при совместном использовании аэрофотоснимков.
- Стереофотограмметрическая (высотная) аэрофотосъемка, позволяющая получить полный топографический план рельефа местности с горизонтали на основе настольной обработки аэрофотоснимков с небольшим количеством точек съемки.
Процесс съемки в воздухе для всех этих типов аэрофотосъемки в основном одинаков, но стереофотограмметрическая съемка предъявляет особые требования к оптике, юстировке устройства и фиксации элементов внешней ориентации. Аэрофотосъемку можно различить по масштабу фотографии.
Запланированные аэрофотосъемки, в зависимости от полученного масштаба аэрофотоснимков, делятся на:
- крупномасштабный — с фотографическим масштабом более 1: 10000; маршрут полета аэрофотосъемки
- средние — с фотографическим масштабом меньше 1: 10000 до 1: 30000;
- мелкомасштабные — с фотографическим масштабом менее 1: 30000; 1: 50000; 1: 75000 и максимум 1: 100000.
Фотограмметрическая обработка запланированных аэрофотоснимков очень проста. В условиях равнинной местности это будет состоять, прежде всего, в устранении искажений из-за несоблюдения вертикального положения оптической оси камеры и из-за колебаний высоты полета. Чтобы сделать леса известными и исследовать их на больших территориях, вполне возможно ограничиться использованием упрощенных фотографий, составленных из аэрофотоснимков, уменьшенных до тех же масштабов. Возможность использовать запланированные аэрофотоснимки для лесного налогообложения без предварительной и сложной фотограмметрической обработки (развертывание, преобразование) является большим преимуществом и позволяет использовать их для полевых работ сразу после аэрофотосъемки. В тех же случаях, когда требуются более точные планы для решения различных задач лесного хозяйства и, в частности, задач лесной инженерии, фотопланы создаются в соответствии с требуемой степенью точности (если есть геодезическая основа) путем применения метода фототриангуляции и преобразования антенны. фотографии. Из-за относительно небольшого количества искажений на снимках леса на запланированных аэрофотоснимках их использование не вызывает особых затруднений. С продольным перекрытием 56-60% создается полная возможность для стереоскопического просмотра, создания контуров участков, декодирования различных категорий областей и земель и составления их описания.
Основным недостатком плановой аэрофотосъемки является ее низкая производительность по сравнению с перспективными и плановыми перспективными съемками. Но при современном состоянии техники этот недостаток устраняется в связи с использованием широкоугольных объектов, увеличением формата аэрофотоснимков и высоты фотографирования. Аэрофотоснимки косых аэрофотоснимков с перспективным изображением области, сделанной неизбежно, имеют резко изменяющийся масштаб, уменьшающийся от переднего плана к дальнему. В то же время значительное уменьшение масштаба на заднем плане вызывает резкое падение распознавания захваченных объектов и показателей налогообложения стендов. При проспективной аэрофотосъемке в горных районах, при наличии резко очерченного рельефа, аэрофотоснимки дают значительные искажения ситуации, появляются «мертвые» пространства, в результате чего на них не фиксируется ряд важных деталей местности. Стереоскопическое исследование таких аэрофотоснимков возможно. Лучше на переднем плане и с небольшим перспективным изображением местности. К недостаткам перспективных аэрофотосъемок относится большая сложность их фотограмметрической обработки. Суть слот-аэрофотосъемки состоит в том, чтобы непрерывно фотографировать полосу местности на движущейся пленке через узкую щель в фокальной плоскости камеры, расположенную перпендикулярно направлению полета. При целенаправленной аэрофотосъемке пленка постоянно экспонируется, поэтому контактная печать на рулонной бумаге выглядит как непрерывная лента. Движение пленки синхронизируется с движением изображения, что определяет резкость изображения. Чаще всего слот-устройства делаются двоякими; один из них — широкоугольный — дает мелкомасштабное изображение, другой — крупномасштабный. С помощью этих устройств можно делать фотографии с малых высот в пасмурные дни и в сумерках, получать запланированные аэрофотоснимки одновременно в различных масштабах, выполнять стереоскопическую съемку под любым заданным углом.
Процесс стрельбы
Аэрофотосъемка состоит из подготовительной, летно-съемочной полевой фотолаборатории и полевой фотограмметрической работы. Подготовительная работа. Одним из важнейших процессов является расчет элементов аэрофотосъемки. Это требует заданных значений масштаба фотографирования и фокусного расстояния AFA, формата аэрофотоснимков, заданного процента продольного и поперечного перекрытия и размера зоны съемки. Используя эти исходные данные, определяются высота и основа фотографирования, интервал между экспозициями, количество аэрофотоснимков на маршруте и на месте съемки, а также время, необходимое для аэрофотосъемки всего участка.
Перед началом летной съемки оборудование проверяется и подготавливается к работе, материалы и схемы полетов используются для обучения экипажей и составления расписания полетов, затем делаются аэрофотоснимки, оператор определяет угол сноса и скорость относительно земли самолета, т.е. скорость самолета относительно Земли. Учитывая величину угла сноса, самолет поворачивается против ветра на угол опережения. Для расчета временного интервала между экспозициями необходима путевая скорость самолета или другой среды. Угол дрейфа и скорость полета самолета определяются с помощью оптических прицелов в прямом и обратном направлениях по маршруту. После этого они приступают к оборудованию, следят за его работой и прокладывают маршруты аэрофотосъемки в соответствии с проектом. Маршрут воздушного судна наносится на приборы, контролируемые наземными ориентирами. При отсутствии ориентиров, маршруты съемки и подходы к ним выполняются инструментальным способом, особенностью которого является прокладка маршрутов только на основе показаний навигационных и летных приборов. Полевые фотолаборатории состоят из негативных и позитивных процессов. Негативный процесс включает в себя разработку, фиксацию промывки экспонированной аэропленки на специальных ручных или автоматических устройствах, которые предназначены для обеспечения равномерного и правильного времени проявления пленки. Чаще всего используются проявочные устройства с устройством перемотки пленки. Они состоят из двух вращающихся катушек, расположенных на одной общей кровати.
Пленка равномерно перематывается с одной катушки на другую вручную или с помощью электродвигателя, и в этот момент пленка находится в проявочном растворе. После сушки аэропленка переносится в фотограмметрическую группу, где негативы регистрируются и нумеруются. Затем фильм попадает в темную комнату для создания позитивных отпечатков. Положительный процесс заключается в получении контактных аэрофотоснимков путем печати на специальных машинах фотоизображений с негативов на светочувствительную фотобумагу или позитивную пленку. Контактные отпечатки должны быть достаточно контрастными и иметь полный вырез деталей по всей площади негатива. Чтобы получить одинаковые аэрофотоснимки, необходимо учитывать степень контрастности негативов при наборе фотобумаги, соблюдать желаемую экспозицию и правильно выполнять проявление. Нумерация и регистрация аэронегативов производится сразу же после сушки аэрофильмов. Каждый аэронегатив пронумерован со стороны эмульсии в верхнем левом углу обратной буквой. Помимо серийных номеров аэрофотоснимков, подписываются дата и номенклатура региона аэрофотоснимков. Все аэрофотоснимки записываются в журнал и отправляются в фотолабораторию для контактной печати. Предаэрофотоснимки выложены вдоль маршрутов. Установка начинается с верхнего маршрута справа налево или слева направо, поэтому отображаются номера аэрофотоснимков, которые последовательно накладываются друг на друга, монтируются по контурам местности в местах, покрытых и закрепленных кнопками. Каждый последующий маршрут связан с предыдущими вдоль потолков. Получившаяся компоновка рабочего блока позволяет установить границы захваченной территории для проверки технического фотографического качества съемочной работы. Предоставляя предварительную оценку качества аэрофотоснимков, устанавливают места для повторных аэрофотоснимков, если перекрытие между аэрофотоснимками меньше заданного значения или имеются фотографические дефекты.
Оценка качества аэрофотоснимков
После повторной съемки отклоненных маршрутов проводится окончательная оценка материалов на предмет их фотограмметрических и фотографических качеств. Фотограмметрическое качество аэрофотоснимков определяется степенью соответствия заданному продольному и поперечному перекрытию, параллельностью сторон аэрофотоснимков линиям оснований, прямолинейности оснований, прямолинейности трасс и выравнивание воздушной пленки. Проверьте продольное и поперечное наложение контактных отпечатков с помощью фотограмметрической линейки. Аэрофотоснимки с продольным перекрытием менее 56% и поперечным перекрытием менее 20% считаются неудовлетворительными. Поперечное перекрытие измеряется между аэрофотоснимками соседних маршрутов так же, как и при оценке продольных перекрытий.
Чтобы определить величину непараллельности базисной линии сторонам аэрофотоснимков, две соседние аэрофотоснимки маршрута смонтированы на контурах, расположенных вблизи исходного направления. Затем измерьте угол между стороной одной из аэрофотоснимков и линией, соединяющей идентичные углы аэрофотоснимков. Прямолинейность маршрутов при обследовании равнинных участков контролируется блочной планировкой участка, а при съемке горных районов — блочной аэрофотосъемкой отдельных маршрутов. Основные точки экстремальных аэрофотоснимков отдельных маршрутов связаны прямой линией L и измеряется наибольшее отклонение центра аэрофотоснимка от прямой (отклонение съемки 1). Если линия, соединяющая центры, является гладкой линией без заметной локальной кривизны, то для всего маршрута в виде отношения отклоняющей стрелки 1 к расстоянию между центрами экстремальных аэрофотоснимков L умножьте на 100. Если есть один или Более заметны кривизны на трассе, то они соединяются прямыми линиями с центрами экстремальных аэрофотоснимков каждого из изогнутых отрезков, причем измерения 1, L и расчет индекса параллельности проводятся отдельно для каждого из них. Не прямолинейность считается неприемлемой при наличии 3. Выравнивание аэрофотоснимка предварительно проверяется на отсутствие видимой неточности фотоизображения и видимой кривизны контрольных нитей на аэрофотоснимках. А также просмотр аэрофотоснимков под стереоскопом. В этом случае аэрофотоснимки равнинной местности рассматриваются с нулевым стереоэффектом (основа фотографирования перпендикулярна основанию устройства).
В этом случае стерео модель должна быть полностью плоской. Аэрофотоснимки пересеченной местности просматриваются с прямым стереоэффектом (основы фотографирования параллельны основанию устройства), и в то же время искажения закономерностей форм отдельных рельефных элементов не должны быть заметны для глаза. Если материалы аэрофотоснимков предназначены для стереофотограмметрической обработки, то в начале, в конце каждого маршрута и на каждом пятом аэронегативе измеряются отклонения от прямого изображения контрольных нитей. Отклонения, превышающие 0,10 мм, считаются неприемлемыми. Если обнаружены отклонения более 0,10 мм, а во всех других сомнительных случаях контрольные измерения производятся фотограмметрическими методами. Фотографическое качество аэрофотоснимков оценивается путем их последовательного просмотра и оценки степени удовлетворенности требованиями, предъявляемыми к ним в соответствии с действующими инструкциями. Для объективной оценки качества негативов и контактных отпечатков они используют стандарты и те опоры, которые приведены ниже.
Резкость и детализация в затененных и освещенных областях должны быть достаточными по всему полю изображения. Аэрофотоснимки должны отображать все детали, которые находятся на негативе. Плотность и контрастность должны быть достаточными и равномерно распределенными по центру и по краям. Для спектрозональных негативов максимальная плотность деталей на негативе не должна превышать 1,8-2,0 ед. коэффициент контрастности должен быть в диапазоне 1,4-1,8, а дисбаланс слоев не должен превышать 0,4-0,5 единиц. Завеса не должна препятствовать качественной печати, то есть должна соответствовать техническим условиям, предусмотренным на заводе для данного типа воздушной пленки: для спектрозональных негативов синяя завеса не превышает 0,6; пурпурная вуаль — не более 0,4.
Спектрозональные негативы, снятые с повышенной мутностью, не принимаются. Они характеризуются чрезмерным воздействием пурпурного слоя, низкой контрастностью, однообразием всего изображения. Изображения облаков от них, царапин, пятен, полос и других дефектов не должны препятствовать дешифровке и фотограмметрической работе. Спектрозональные аэронегативы должны иметь ярко выраженное цветовое разделение, изображения хвойных и лесных массивов должны быть заметно различаться по цвету, а вся область ограничена изображением контрольных нитей. Нельзя допустить разницу в цветовой тон между аэрофотоснимками одного маршрута и разными маршрутами. Цветопередача по всему объекту должна быть одинаковой. Из измеренных значений для каждой аэрофотоснимка и визуальной оценки устанавливается среднее значение, которое объективно указывает фотографическое качество пленки в целом. Если полет признан удовлетворительным, то они выполняют окончательную компоновку блока, на которой отмечены рамки трапеции международной маркировки, написаны названия населенных пунктов и рек, а также номенклатура трапеции. С блока сделал репродукцию.
Масштаб воспроизведения должен быть в три-четыре раза меньше, чем масштаб аэрофотосъемки. Размытые репродукции сделаны позже при обследовании лесов и лесопользования. По их словам, вы можете предварительно ознакомиться с областью работы, разделить территорию на зоны налогообложения и выбрать аэрофотоснимки для полевых работ. Для изучения объектов земной поверхности, в том числе лесов, широко используются дистанционные методы. Они основаны на получении информации об изучаемых объектах на расстоянии путем регистрации электромагнитного излучения с использованием чувствительных приемников, установленных на самолетах, космических кораблях и т. д., или человеческим глазом. Источниками электромагнитного излучения являются солнечные и радиоэлектрические приборы. Они излучают электромагнитные волны широкого спектрального диапазона. Излучение характеризуется длиной волны и чистотой колебаний.
Длина волны выражается в микрометрах (мкм) — тысячные доли миллиметра или нанометры (нм) — тысячные доли микрометра. В зависимости от длины волны электромагнитное излучение может быть представлено в виде спектральной шкалы. В этом случае спектральная область с интервалами длин волн менее 0,01 мкм называется рентгеновской, от 0,01-0,38 мкм — ультрафиолетовой (УФ), 0,38-0,76 мкм — видимой, 0,76-1000 мкм — инфракрасной (ИК), 1000 микрон или больше — радиоволна. При изучении земной поверхности на расстоянии используются разные области спектра — от радиодиапазона до УФ. Дистанционные методы можно разделить на аэрометоды, когда съемки или наблюдения проводятся из атмосферы, и космические методы из космоса. Удаленная съемка и в зависимости от используемого оборудования делятся на фотографические и нефотографические. Материалы обследования могут быть представлены в виде изображений, записей на магнитных носителях, графиков, регистров и т. д. Не фотографические съемки могут быть пассивными и активными.
Пассивная съемка может быть пассивной и активной. Пассивная съемка состоит в регистрации солнечного излучения, отраженного объектом, или собственного теплового излучения земных объектов. Пассивные включают в себя сканер (в том числе тепловой и микроволновой) и телевизионные съемки. Сканирование осуществляется оптико-механическими сканерами телевизионных (ТВ) — передающих камер, микроволновых — радиометров. При активной съемке местность облучается искусственным источником лучистой энергии, и приемник отражает отраженные в этом волны. Примером такого типа съемки является радиолокационная или радиолокационная съемка (РЛ) с использованием радиолокационных станций, установленных на самолете, которые облучают местность электромагнитными волнами вдоль линии полета. Отраженные в этом случае сигналы регистрируются на электронно-лучевой трубке (ЭЛТ). Съемка может быть выполнена в одной зоне спектра (однозонная съемка) или одновременно в нескольких разных, более узких зонах электромагнитного спектра (многозонная или мультиспектральная съемка). Каждый вид стрельбы имеет свои особенности, достоинства и недостатки. Например, RL — съемка не зависит от метеорологических условий: сканер и TV — съемки обеспечивают оперативную доставку информации из космоса на Землю в цифровом виде, что позволяет напрямую вводить ее в компьютер и упрощать машинный анализ информации съемки: ИК тепловая и RL — съемки только днем, но и ночью. ИК тепловидение эффективно используется для обнаружения локальных, в том числе подземных лесных пожаров. Мультизональные съемки позволяют сравнивать значения оптических плотностей в разных областях спектра, а также получать цветные и ложные цветные изображения захваченных объектов. Некоторые из них уже применяются, другие начинают находить применение в лесном хозяйстве. Однако наиболее широко используемыми при изучении лесов и мониторинге их состояния являются фотографические аэрофотосъемки и космические съемки и аэровизуальные наблюдения. За рубежом широко используются многозонные сканерные изображения.
Расположение и оснащение самолетов и вертолетов
Принцип полета. Тело, которое движется в воздухе, постоянно испытывает сопротивление со стороны последнего. Чтобы преодолеть это сопротивление, вам нужно применить определенную силу. Сила сопротивления воздуха, называемая силой любого сопротивления, с которой сталкивается движущееся в нем тело, прямо пропорциональна плотности воздуха, площади поперечного сечения тела, квадрату скорости движения и зависит от форма тела, его поверхность и положение в потоке воздуха. Этот закон аэродинамики является основой для проектирования самолета. Тела с различными формами и размерами, помещенные в другую среду и имеющие одинаковую силу, будут двигаться с разными скоростями. В этом случае давления, возникающие спереди и сзади, будут разными, и чем больше эта разница, тем больше область турбулентности, тем ниже скорость продвижения и тем больше сила сопротивления. При обтекании тела с угловатыми формами воздушный поток замедляется меньше, чем при обтекании пластины, и поэтому область пониженного давления и сила любого сопротивления меньше. Давление будет незначительным спереди и сзади в виде каплеобразного тела в потоке воздуха, так как струйки воздуха обтекают его и почти не образуют вихри. В этом случае для преодоления любого сопротивления потребуется наименьшая сила. Для летального аппарата решающее значение имеет обтекаемая форма, которая создает наименьшее сопротивление и не вызывает турбулентности. Каплевидные и крыловидные тела имеют эту форму. Подъемная сила. Крылья самолета и опорные отверстия вертолета являются их основными частями. Они создают лифт, и благодаря им совершается полет. Пусть крыло движется в воздухе под определенным углом атаки. Частица воздуха, встречаясь с летающим крылом, огибает верхнюю выпуклую и нижнюю плоскую или слегка вогнутую поверхность крыла. Потоки, которые текут вокруг крыла сверху, должны идти в то же время дольше, чем потоки, которые текут вокруг крыла снизу. Поэтому верхние струйки движутся быстрее, чем нижние. Чем больше скорость воздушного потока, тем меньше давление на него (закон Бернулли). Следовательно, над крылом меньше давления, чем под крылом.
В результате этого возникает подъемная сила, направленная перпендикулярно потоку воздуха и действующая снизу вверх. Полет транспортных средств тяжелее воздуха — самолетов и вертолетов — основан на этом свойстве. Но для того, чтобы устройство двигалось в воздухе с определенной скоростью, оно должно постоянно преодолевать сопротивление воздуха. Это достигается за счет тяги пропеллера, вращаемого двигателем устройства, или за счет влияния реактивных сил, возникающих в результате выбрасывания выхлопных газов из турбины самолета обратно с высокой скоростью. Оборудование. При рассмотрении вопроса об оснащении самолетов и вертолетов мы имеем в виду полет и навигацию, а также другое специальное оборудование для аэрофотосъемки: автопилот и устройство автоматического изменения курса, компас и систему направления, альтиметр и оптические бортовые прицельные устройства. Автопилот предназначен для автоматического управления самолетом. Он стабилизирует заданный курс, высоту полета и положение воздушного судна в полете, а также обеспечивает доступ к заданному маршруту и повороту при выходе из маршрута по маршруту.
В настоящее время автопилоты типа AP-6E используются для самолетов IL-14FK и AP-28L-1F для самолета аэрофотосъемки Ан-30. Устройство автоматического выключения программы — это устройство с автопилотом, обеспечивающее автоматическое управление самолетом на протяжении всего полета с аэросъемки. Схема автоматического реверса модели APR — 2 состоит из двух частей: автомат сближения и стабилизатор. Компас и система курсов. Компас используется для определения курса или направления полета. Дистанционный астрономический компас DAK-DB-5V генерирует истинный курс самолета посредством автоматического определения направления Солнца, может работать независимо и в сочетании с системой курса в качестве датчика истинного курса (широко используется на практике). Система курсов служит для прокладки маршрутов в заданном направлении и состоит из магнитных, гироскопических, радиотехнических и астрономических средств измерения курса самолета, указания его на визуальные признаки, а также выдачи сигналов направления на автопилот и навигационный компьютер. Используются различные типы систем, в том числе КС-6 и ГМК-1А.
Система курса KS-6 установлена на самолетах для воздушной разведки самолетов Ан-30 и Ил-14ФК, а система GMK-1A — на вертолете Ка-26. Измерители путевой скорости и угла дрейфа. На самолетах, выполняющих аэрофотосъемку, установлен доплеровский измеритель DISP-013-24 FC, который непрерывно автоматически измеряет скорость относительно земли и угол сноса при полете над любой местностью. Комплекс измерителя FC DISS-013-24 состоит из высокочастотного (антенного) и низкочастотного блоков, блока вывода данных, индикатора панели управления и воздуходувки высокочастотного блока. Он установлен на самолетах Ан-30 и Ил-14ФК. Альтиметры используются для определения высоты полета. Они бывают двух типов — анероид и радиовысотомер. Первый — это анероидный барометр, длина шкалы которого выражена в метрах. Для определения расстояния от центра аэрофотосъемки до ближайшей точки земной поверхности используется топографический радиовысотомер.
Он состоит из приемопередатчика, измерительного блока, цифрового индикатора высоты, антенны, панели управления и рамы амортизации. Используя RV-18ZH, можно измерить высоту полета до 10000 м со среднеквадратичной ошибкой не более 5 м. Его вес составляет 20 кг. Регистрация показаний радиовысотомера выполняется автоматически путем фотографирования цифрового индикатора высоты с помощью фотографического регистратора TAU или ARFA-7. Для измерения и автоматической регистрации колебаний высоты полета используются статоскопы S-51, S-51M и TAU. Они представляют собой жидкостные дифференциальные барометры и позволяют измерять и регистрировать изменения статического давления, которые при последующей обработке определяют разницу высот центров аэрофотосъемки. При выполнении аэрофотосъемки используются оптические бортовые прицельные приспособления ОПБ-1Р, НКБП-7 и МКВ. Они предназначены для измерения угла дрейфа, определения интервала фотографирования, а также для контроля правильности продолжения трасс. Оптический прицел ОПБ-1Р представляет собой телескопическую систему, состоящую из линзы, окуляра, сферического уровня, сетки, двух линз, системы намотки и двух призм (подвижных и неподвижных). Он установлен на самолетах Ан-30, Ил-14ФК и Ан-2. Прицел оптического коллиматора НКБП-7 обеспечивает построение углов обзора от -15 до +85 в вертикальной плоскости и + в горизонтальной.
Прицел установлен на самолеты Ан-30, Ил-14ФК и вертолет Ка-26. Работа механического прицела широкоугольного коллиматора воздушной съемки МКВ-1 основана на том, что полупрозрачное сферическое зеркало оптической системы создает на бесконечности изображение сетки, расположенной в фокусе зеркала, т.е. проецирует продольный курс линия на местности. Масса устройства составляет 1,5 кг. Угол обзора прицельного устройства по маршруту 105, по маршруту составляет + 5. Электронное командное устройство ЭКП-2М представляет собой полуавтоматическое устройство, предназначенное для определения необходимого темпа работы аэрофотокамеры, измерения угла сноса и обеспечения АФК. работа в автоматическом режиме в сочетании с РВ-18Ж и ДИСС-013 -24ФК. EKP-2M позволяет автоматически передавать командные импульсы одному или двум AFA с разными фокусными расстояниями. В то же время для каждого AFA поддерживается заданное продольное перекрытие аэрофотоснимков. Он может передавать сигналы на антенную установку для поворота AFA на угол сноса. Устройство состоит из двух блоков: оптического козырька, который служит для измерения интервала фотографирования и угла дрейфа, и электронного блока, который выполняет функции счетного и разрешающего устройства. Установите вес 45 кг. Аэроэкспонометр АЕ-2 используется для объективного определения экспозиции во время аэрофотосъемки. Это фотоэлектрический счетчик с электронным калькулятором. Значения скорости затвора аэрофотоаппарата для заданных значений относительной апертуры и светочувствительности фотоматериала, введенного в электронный калькулятор, и для интегрированной освещенности, измеренной приемником света, отображаются на циферблате. индикатор аэроэкспонометра. Конструктивно АЕ-2 состоит из двух блоков: автомобильного приемника и индикаторного блока. Масса комплекса составляет 6 кг. Аэрофотосъемки, предназначенные для стабилизации интегрированной плотности аэро-негативов как в пределах одного аэрофильма, так и от пленки к пленке, а также для получения аэрофильмов для автоматической обработки на проявочных машинах, оснащены автоматическим контролем экспозиции (ARE). Чувствительными элементами являются фотоэлемент и фоторезистор со спектральной чувствительностью, соответствующей достаточной точности для всех типов используемых аэрофотоснимков. Точность оптической стабилизации плотности находится в пределах + 15%.
Сущность спутниковых снимков
Космическая съемка — это изображение Земли с космического корабля (ОАК). Нижняя граница околоземного космического пространства, где космический аппарат может совершать обороты вокруг Земли, составляет 140-150 км. Максимальная высота стрельбы ограничена соответствующим минимальным масштабом Земли. Основой космических съемок является аэрофотосъемка, в которую дополнительно входят элементы небесной механики, физики атмосферы и другие. Функции космического зондирования также включают перемещение космического корабля по орбите в соответствии с законом небесной механики и аэродинамики, быстро меняющиеся условия освещения на траектории полета, влияние всей атмосферы на качество изображения, широкий спектр ландшафтов, которые могут иметь различные сезонные условия , Запуск космического корабля, управление его полетом, стрельба и доставка информации на Землю обеспечиваются средствами управления полетом, наземными измерительными и информационными системами в сочетании с космическим аппаратом, как правило, как правило, многоцелевого назначения, экономические системы. Для изучения природных ресурсов Земли (ИПРС), в том числе лесов, используют наблюдательные космические системы, разделенные на две группы: а) предназначенные для наблюдения поверхности Земли, называемые космическими комплексами для изучения природных ресурсов: б) предназначенные для наблюдения за атмосферой, получившие название метеорологических космических комплексов.
Разработка технических средств дистанционного зондирования Земли из космоса идет в двух взаимодополняющих направлениях. Первый из них основан на фотографировании поверхности Земли в видимой и ближней инфракрасной областях спектра и доставке ее на Землю при посадке спускаемого аппарата космического аппарата или в выброшенных контейнерах с фотопленками, что обеспечивает их фотохимическую обработку и изготовление контактной и увеличенной фотопечати. Эти съемочные материалы предназначены для решения проблем, не требующих быстрого принятия решения. Второе направление включает проведение съемок в видимой, инфракрасной и микроволновой областях электромагнитного спектра и передачу полученной информации со спутников по радиоканалам в точки приема, обработку и доставку ее потребителям для изучения быстродвижущихся процессов на поверхности Земли, и решение проблем, связанных с разносторонним изучением природных ресурсов.
Погодные условия
Съемка земной поверхности осуществляется через атмосферу, характеристики которой являются переменными. Его состояние определяется условиями и результатами обследования. Физическое состояние атмосферы характеризуется ее прозрачностью и преломлением в ней лучей, температурой воздуха, атмосферным давлением, влажностью воздуха, облачностью и движением воздушных масс. Наибольшее влияние на эффективность съемки в видимом и ближнем инфракрасном диапазонах спектра оказывают степень прозрачности атмосферы, освещенности и облачности. Аэрофотосъемки и космические съемки обычно проводятся в яркие, солнечные, безоблачные дни. Перистые и перистые облака не мешают им. Аэрофотосъемка возможна при высокой облачности, но над самолетом, выполняющим съемку. Высокая непрерывная облачность позволяет получать бестеневые аэрофотоснимки с улучшенным качеством изображения, смягченными тонами теней, в результате чего купол на стойках виден глубже, его затененные участки лучше видны.
Масштаб аэрофотоснимков
Масштаб аэрофотоснимка — это отношение величины изображения сегмента на нем к величине соответствующего сегмента на земле. Масштаб горизонтальной аэрофотосъемки выражается простым отношением 1 / m = fkH, где m — знаменатель числовой шкалы, fk — фокусное расстояние AFA: H — высота фотографирования. Для плоской местности масштаб является постоянным по всей площади аэрофотоснимка: поэтому горизонтальная аэрофотоснимок является планом плоской местности. Масштаб плановой и аэрофотоснимков не равен масштабу соответствующей горизонтальной аэрофотоснимок. Масштаб планируемой аэрофотоснимка в принципе различен для его частей, но также для каждой точки: он не одинаков для разных направлений. Но поскольку углы наклона планируемых аэрофотоснимков невелики (до 3 г) и искажения невелики, для практических целей масштаб определяется соотношением 1 / m = fkH. Многообещающая аэрофотоснимок в разных его частях имеет существенно отличающиеся масштабы изображения, которые зависят от направления измеряемого сегмента: только вдоль линий, перпендикулярных основной вертикальной шкале, постоянно. Масштаб предполагаемой аэрофотоснимка определяется как отношение бесконечно малого сегмента dr на аэрофотоснимке к соответствующему бесконечно малому сегменту на местности DR.
Вывод:
На изображениях появляются искажения из-за отклонения оптической оси AFA от вертикали, из-за рельефа местности, под влиянием изменений высоты фотографирования и т. д.
Рабочая зона аэрофотосъемки. Величина линейных искажений изображений на аэрофотоснимке тем больше, чем больше расстояние от центра до краев аэрофотоснимка, т.е. все искажения увеличиваются с увеличением расстояний r. Существуют искажения изображения, возникающие под воздействием различных физических факторов: искажение линзы, атмосферная рефракция, деформация воздушной пленки, смещение пленки и т. д. В ходе детального анализа влияние этих факторов может привести к наибольшему искажению и ухудшению качества изображения. по краям аэрофотоснимка. Поэтому при декодировании и создании фотографических планов средняя, наименее искаженная часть аэрофотоснимка называется рабочей областью аэрофотоснимка, что практически определяется путем рисования прямых линий в середине зон продольного и поперечного перекрытий , используется.
Стереоскопический эффект. Основы стереоскопического зрения можно наблюдать одним или двумя глазами. Монокулярное зрение характеризуется тем, что наблюдатель, видя объекты, не имеет представления об объеме формы и расстоянии до них. Эти впечатления получены от части косвенными способами, а не косвенно в результате визуального восприятия. Бинокулярное зрение дополняет представление об объектах, полученных путем их изучения отдельно каждым глазом, впечатлений от объема форм и удаления предметов друг от друга. Бинокулярное зрение, при котором форма объектов и их относительное положение в пространстве хорошо ощущаются, называется стереоскопическим.
На аэроснимке вследствие угла наклона при фотографировании и рельефа местности возникают следующие искажения: линейные смещения, вызванные углом наклона, перспективное искажение углов за наклон аэроснимка, линейное смещение за рельеф и угловые искажения за рельеф.
Линейные смещения, вызванные углом наклона. Линейные смещения точек аэроснимка происходят вдоль направлений, проведенных из точки нулевых искажений.
На аэроснимке проведем главную вертикаль VV, покажем точку нулевых искажений с (рис. 44).

Некоторая точка местности А на наклонном аэроснимке изобразится в точке а. Если бы угол наклона аэроснимка был равен 0, то точка А изобразилась бы в точке а0. Отрезок аа0 представляет собой линейное смещение при наклоне аэроснимка. Обозначим его Δra, а длину отрезка са = r, угол между направлением на точку a и главной вертикалью φ. Тогда линейное смещение определится по формуле

где:
α — угол наклона аэроснимка;
f — главное (фокусное) расстояние аэрофотоаппарата;
r — расстояние от точки нулевых искажений до выбранной точки а.
Из формулы видно, что величина смещения изображения точки вследствие влияния угла наклона а прямо пропорциональна квадрату расстояния от точки нулевых искажений и обратно пропорциональна величине Следовательно, с этой величиной надо считаться, особенно на краях аэроснимков, снятых короткофокусным аэрофотоаппаратом.

Перспективное искажение углов. В виду линейного смещения точек, вызванных углом наклона аэроснимка, направления, проведенные из некоторой точки получат искажения, в частности, направления da и da0 будут отличаться друг от друга на величину Δφ (рис. 45, а). Вследствие этого углы между направлениями на аэроснимке φ не будут равны соответствующим углам на местности φ0 (рис. 45, б).
Зависимость между ними выражается формулой

Эта формула устанавливает зависимость между углами, построенными при любой точке, расположенной на главном вертикале. Абсциссу этой точки на аэроснимках обозначим xd. Следовательно, искажение углов Δφ = φ—φ0 будет зависеть от выбора точки, из которой проведены направления. Если направления проведены из главной точки, то xd=0.
Согласно формуле (23)

Если за вершину направлений принята точка надира, то xd=-ftgα.
Согласно формуле (23)

Если за вершину направлений принять точку нулевых искажений, то xd = -ftg α/2
Наконец, согласно формуле (23)

Следовательно, направления, проведенные из точки нулевых искажений, не искажаются на наклонном аэроснимке и углы, вершины которых находятся в точке с, равны углам на местности.
Максимальное искажение Δφmаx для направлений, проведенных из главной точки, определяется формулой

Подставляя различные величины углов наклона α в эту формулу, получим

С увеличением угла наклона а резко возрастает искажение направлений. В связи с этим большое значение приобретает вопрос о гиростабилизации аэрофотоаппарата при аэрофотосъемке. Ценное свойство малых искажений направлений на наклонных аэроснимках с вершиной направлений вблизи главной точки широко применяется для сгущения плановой основы при составлении планов и позволяет значительно сократить полевые геодезические работы.
Линейные смещения за рельеф. Вследствие рельефа местности на аэроснимках возникают линейные искажения. Точка А местности на аэроснимке изобразилась в точке a. Если бы h = 0, то ока изобразилась бы в точке a0 (рис. 46).
Отрезок а0а представляет смещение точки за рельеф δrh, а отрезок ао=r — расстояние этой точки от главной точки.
Смещение точки за рельеф определяется по формуле

Чем ближе к краям аэроснимка расположены точки, чем больше превышение точек над выбранной средней плоскостью и чем меньше высота фотографирования или фокусное расстояние аэрофотоаппарата, тем больше будут смещения точек из-за влияния рельефа.
Точки, расположенные выше выбранной плоскости, будут изображены на аэроснимке дальше от центра, чем ортогональные их проекции, так как масштабы изображений для плоскостей, проходящих через эти точки, будут крупнее масштаба изображения выбранной плоскости.

Точки, расположенные ниже выбранной плоскости, будут изображены ближе к центру аэроснимка, чем ортогональные их проекции, так как масштабы изображений для плоскостей, проходящих через эти точки, будут мельче масштаба изображения выбранной плоскости.
Следовательно, для получения горизонтальных проложений линий необходимо предварительно в положение точек внести поправки за счет влияния рельефа.
Найденную величину поправки откладывают по направлению к главной точке при положительном превышении и от главной точки при отрицательном А1 (рис. 47).

Угловые искажения за рельеф. Линейные смещения за рельеф сходят вдоль направлений, проведенных из точки надира, так как точка надира является точкой схода вертикальных прямых. Вследствие линейных смещении направления, проведенные из какой-либо точки, например точки о, получат искажения.
Действительно, направления оа0 и оа будут отличаться друг от друга на величину Δφ (рис. 48).

В этой формуле ошибка Δφ прямо пропорциональна А, наклону аэроснимка и масштабу 1/m и обратно пропорциональна расстоянию r.
Рассматривая формулу, видим, что при φ = 0° и 180°, т. е. когда направление совпадает с главной вертикалью, ошибка Δφ = 0; максимальное искажение получит угол, когда точка с находится на главной горизонтали, т. е. при φ = 90° и 270°.
Формула (29) свидетельствует также и о том, что с увеличением расстояния r при работе с аэроснимками большого формата (23×23 см и 30×30 см) уменьшаются искажения в направлениях, так как увеличиваются величины r.
Влияние среднего рельефа местности на направления, проведенные из главной точки аэроснимка, незначительно. Для равнинной местности при плановой аэрофотосъемке этим влиянием можно пренебречь.
ФОТОГРАММЕТРИЯ
(конспект лекций
6семестр)
ОБЩИЕ СВЕДЕНИЯ О
ФОТОГРАММЕТРИИ.
1. 1 ПРЕДМЕТ ФОТОГРАММЕТРИИ, ЕЕ СОДЕРЖАНИЕ И
ЗАДАЧИ.
Фотограмметрия — наука, изучающая способы
определения форм, размеров, пространственного положения и степени изменения во времени
различных объектов, по результатам измерений их фотографических
изображений.
Термин «фотограмметрия» происходит
от греческих слов: photos – свет, gramma – запись, metreo – измерение.
Следовательно, его дословный перевод — измерение светозаписи.
Предметы изучения фотограмметрии это
геометрические и физические свойства снимков, способы их получения и
использования для определения количественных и качественных характеристик
сфотографированных объектов, а также приборы и программные продукты, применяемые
в процессе обработки.
Характеристики объекта могут изучаться по его
изображению на одиночном снимке или по паре перекрывающихся снимков, полученных
из различных точек пространства.
Если при изучении объекта
используются свойства одиночного снимка, то такой метод получения необходимой
информации называют фотограмметрическим. Если же он изучается по паре
перекрывающихся снимков, то метод называют стереофотограмметрическим.
В настоящее время в фотограмметрии выделяют
три направления исследований. В первом изучаются и развиваются методы
картографирования земной поверхности по снимкам. Второе связано с решением
прикладных задач в различных областях науки и техники. В третьем развиваются
технологии получения информации об объектах Земли, Луны и планет солнечной
системы с помощью аппаратуры, установленной на космических летательных
аппаратах. Задачи и методы последнего из указанных направлений существенно
отличаются от первых двух, и далее детально не рассматриваются.
Основными достоинствами фотограмметрического и
стереофотограмметрического методов являются:
— высокая точность результатов, так как снимки объектов получают
прецизионными фотокамерами, а их обработку выполняют, как правило, строгими
методами;
— высокая производительность, достигаемая благодаря тому, что
измеряют не сами объекты, а их изображения. Это позволяет обеспечить
автоматизацию процесса измерений и последующих вычислений;
— объективность и достоверность информации, возможность при
необходимости повторения измерений;
— возможность
получения в короткий срок информации о состоянии, как всего объекта, так и
отдельных его частей;
— безопасность ведения работ, так как съемка объекта выполняется
неконтактным (дистанционным) методом. Это имеет особое значение, когда объект
недоступен или пребывание в его зоне опасно для здоровья человека.
— возможность
изучения движущихся объектов и быстро протекающих процессов.
Наряду с отмеченными достоинствами
рассматриваемые методы имеют и недостатки. К ним следует отнести
зависимость фотографических съемок от метеоусловий и необходимость выполнения
полевых геодезических работ с целью контроля всех технологических процессов.
Поэтому только разумное их сочетание с другими методами получения информации
может обеспечить решение поставленной задачи с минимальными затратами
труда и средств.
Современная фотограмметрия как техническая наука тесно связана с науками
физико-математического цикла, достижениями радиоэлектроники, вычислительной
техники, приборостроения, фотографии. Она органически связана с геодезией,
топографией и картографией.
На основе достижения физики и особенно оптики созданы современные
объективы съемочных и обрабатывающих приборов.
Успехи в развитии электроники, радиоэлектроники, вычислительной техники
и космической геодезии способствовали автоматизации процессов самолетовождения
и управления полетами космических кораблей созданию сенсоров, для получения
изображений в цифровом виде, а также приборов для определения положения снимков
в момент фотографирования, автоматизации процессов обработки и хранения
информации, которой обладают снимки.
Благодаря химии освоен выпуск
черно-белых и цветных фотоматериалов. Математика широко применяется в
разработке теории фотограмметрии при решении практических задач.
Методами, известными в астрономии и геодезии,
снимки обеспечиваются опорными точками, необходимыми для создания съемочной
сети с целью составления топографических карт и планов или решения прикладных
задач.
При создании по фотоснимкам планов и карт и их
оформлении используются достижениями картографии.
1. 2 ФОТОТОПОГРАФИЯ И ФОТОТОПОГРАФИЧЕСКИЕ
СЪЕМКИ.
Фототопография решает задачу создания
топографических карт и планов и построения цифровых моделей местности с
использованием материалов фотосъемки. Она является разделом фотограмметрии.
Комплекс процессов, выполняемых для создания по снимкам топографических карт и
планов, называется фототопографической съемкой.
В зависимости от технических средств,
применяемых для фотографирования местности, различают два вида
фототопографической съемки: наземную фототопографическую,
аэрофототопографическую, в горной местности их иногда комбинируют.
В наземной фототопографической съемке
местность фотографируют фототеодолитом с точек земной поверхности. Её
применяют, как правило, в высокогорной и горной, преимущественно открытой
местности со сложными формами рельефа. На небольших участках она может быть
применена как самостоятельный метод, а при картографировании значительных
площадей – в сочетании с другими методами съемок. Ее, в частности, с успехом
применяют при маркшейдерском обслуживании открытых горных работ.
Аэрофототопографическая съемка является
основным видом при топографическом картировании в масштабах от
1: 100 000 до 1: 500. Фотографирование местности в этом случае
производится аэрофотоаппаратом, установленным на самолете, вертолете или
другом носителе. Основными методами создания карт и планов в этом виде съемки
являются комбинированный и стереотопографический.
В комбинированном методе используются
свойства, как одиночного снимка, так и пары. Он предполагает получение контурной
части карты в камеральных условиях (в результате составления фотопланов или
средствами стереоизмерений), а рельефа — по данным полевых геодезических
измерений. Этот метод используется для съемки плоскоравнинных районов, когда
рельеф местности плохо просматривается стереоскопически и не может быть
достаточно точно отображен по снимкам.
Стереотопографический метод съемки является
основным при картографировании местности. В нем используются свойства пары
снимков, что позволяет в камеральных условиях получать не только контурную, но
и высотную части карты. Этим методом создаются карты (планы) высокогорных,
горных, холмистых, а иногда и равнинных районов.
Основными процессами аэрофототопографической
съемки являются: летносъемочный, топографо-геодезический и фотограмметрический.
В задачу летносъемочного процесса входят
воздушное фотографирование местности, регистрация показаний спецприборов,
фиксирующих положение снимков в момент фотографирования, а также
фотографическая обработка материалов съемки и изготовление фотоснимков (если
снимки получены не цифровыми камерами).
В топографо-геодезический процесс следует
включить определение геодезических координат точек местности, изобразившихся на
снимках. Эти точки называют опознаками. Их число зависит от принятой технологии
съемки и ее масштаба, от качества снимков и физико-географических условий
района работ. В топографо-геодезический процесс входит и дешифрирование – опознавание
объектов местности, изобразившихся на снимках и определение их характеристик.
Различают полевое, камеральное и комбинированное дешифрирование. Чаще применяют
комбинированное дешифрирование, когда в поле составляют снимки-эталоны с
результатами опознавания наиболее характерных для данного района объектов. Они
затем используются в камеральных условиях для дешифрирования остальных снимков.
Фотограмметрический процесс состоит в сгущении
опорного обоснования снимков с использованием данных полевых геодезических
работ и показаний спецприборов, составлении плана или карты, которые затем
оформляют и размножают, цифровых моделей местности и фотопланов.
При сочетании наземной фототопографической и
аэрофототопографической съемок местность фотографируется дважды: фототеодолитом
с наземных станций и аэрофотоаппаратом с летательного аппарата. По наземным
снимкам сгущается опорная геодезическая сеть, а по аэроснимкам составляется
топографическая карта. Этот вид фототопографической съемки требует наличия
аппаратуры для производства наземной и воздушной фотосъемок и приборов для
обработки наземных снимков и аэроснимков. На практике он применяется редко.
1. 3 ПРИКЛАДНАЯ ФОТОГРАММЕТРИЯ.
Фотограмметрия применяется главным образом для
составления топографических карт и планов. Однако в настоящее время она находит
все более широкое применение при решении различных прикладных задач. Для какой
бы цели не применялась фотограмметрия, основные принципы ее остаются теми же
самыми. Фотограмметрическое оборудование, используемое, прежде всего, в
картографических целях, можно применить и в других областях науки и техники.
В процессе решения нетопографических задач
часто достаточно иметь топографический план с фотопланом, или фотодокументы
пониженной точности, цифровую модель участка местности, построенную по
измерениям снимков или только измеренные по снимкам координаты точек изучаемого
объекта.
В нашей стране фотограмметрические методы
применяют:
— Для изысканий и
проектирования различного рода линейных сооружений (автомобильных и железных
дорог, трубопроводов, линий электропередачи и т.д.). В этих случаях обычно
составляют изыскательские планы, которые могут иметь меньшую точность и
условную систему координат, фотосхему полосы местности и профиль местности,
построенный по измерениям снимков;
— В строительстве
при определении качества строительства, повышении надежности и долговечности
промышленных и гражданских сооружений и т.д.;
— В
геологоразведочных работах. Аэро и космические снимки позволяют по данным
дешифрирования более рационально подойти к выбору территорий, перспективных для
поиска и разведке полезных ископаемых, наметить точки для бурения скважин и
определить их координаты;
— В геофизике для
получения координат и высот заданных точек местности и определения
топографических поправок в измеренные значения силы тяжести;
— В архитектуре при
производстве обмеров, составлении планов фасадов, изготовлении объемных
моделей, съемке и воспроизведении архитектурных памятников, изучении и
измерении архитектурных композиций, скульптур и т.д.
— В горном деле для
съемки открытых горных разработок с составлением маркшейдерских планов карьеров,
дражных участков, бульдозерных полигонов, складов готовой продукции и т.д.;
— В географических исследованиях (изучение ледников, селей, оползней и
др.);
— При картировании дна и получении глубин шельфа, изучении морского
волнения, определении скорости и направления течения в открытом море;
— В медицине и хирургии для диагностики и лечении заболеваний отдельных
органов человека, а также для обнаружения в организме посторонних предметов и
опухолей;
— В военном деле и т.д.
1. 4 ИСТОРИЯ РАЗВИТИЯ ФОТОГРАММЕТРИИ.
Начало научных основ теории определения формы,
размеров и положения объектов по их перспективным изображениям было
положено еще в эпоху Возрождения. Работами Альберти (1511 г.), Дюрера (1525 г.),
Дезарга (1636 г.) были заложены предпосылки для развития теории
перспективы, позволившие швейцарскому математику И. Ламберту опубликовать
в 1759 г. обобщающий труд «Свободная перспектива». Практическое применение
перспективных рисунков, полученных камерой-обскурой, в топографии связано с
именами М.А. Капеллера (1725 г.), М.В. Ломоносова (1764 г.),
Ш.-Ф. Ботан-Бопре (1791 г.).
Важнейшим событием в истории фотограмметрии
явилось изобретение фотографии (Ж.Н. Ньепс, Ж.М. Даггер и
У. Тальбот, 1839 г.) и стереофотографии (Дюбоск, 1844 г. и
И.Ф. Александровский, 1852 г.). Первые теоретические и практические
разработки по использованию фотографического изображения для составления
топографических карт принадлежат французскому офицеру Э. Лосседа
(1849-1868 гг.). Дальнейшие совершенствования фотограмметрии в конце XIX
в. связано с именами А. Майденбауера, В. Иордана,
С. Финстервальдера (Германия), П. Паганини (Италия), Е. Девиля
(Канада), Н.Ф. Виллера, Р.Ю. Тиле, П.И. Щурова (Россия).
Большой вклад в разработку теории и практику
фотограмметрических работ, создание приборов внесли русские инженеры.
Первые опытные работы по фототопографической съемке выполнены в России в 1891 г.
Н.Ф. Виллером при изыскании Закавказской железной дороги. В 1897 г.
Р.Ю. Тиле и II.И. Щуров применили фототеодолитную съемку на
изысканиях Забайкальской и Маньчжурской железных дорог. К этому времени
относится публикация первых научных трудов по фотограмметрии С. Коппе
(1889 г.), Е. Девиля (1895 г.), Г.Н. Шибуева и
Н.Н. Веселовского (1899 г.).
Большое влияние на дальнейшее развитие
фотограмметрии оказали трехтомный труд Р.Ю. Тиле «Фотография в
современном развитии» (1908-1909 гг.) и первый учебник
«Измерительная фотография и ее применение в воздухоплавании» (1907 г.),
написанный В.Ф. Найденовым для слушателей Военно-инженерной академии. В
учебнике были обобщены вопросы теоретической фотограмметрии и дано
математическое обоснование способов графического трансформирования аэроснимков.
Одновременно с наземным фотографированием
развивается фотографирование с воздушных носителей (шаров, аэростатов и т.д.).
Первые фотографии с аэростатов были получены в 1858 г французом
Ф. Надаром. В России началу аэрофотосъемочных работ положили поручик
А.М. Кованько, выполнивший в 1886 г с воздушного шара аэрофотосъемку
устья реки Невы с высот 800,1200 и 1350 м, и полковник
Н.А. Козлов, впервые в 1887 г выполнивший аэрофотосъемку на пленку.
Развитие авиации, точного приборостроения и
оптики привело к дальнейшему совершенствованию методов фотограмметрии.
Решающими в истории ее развития после изобретения фотографии явились открытие
Штольцем в 1892 г. принципа измерительной марки, изобретение
Е. Девиллом в 1895 г. стереоскопического прибора для составления карт
по фотоснимкам и изобретение К. Пульфрихом в 1901 г.
стереокомпаратора.
Стереоскопический принцип измерения стереопары
устранил трудности связанные с отождествлением одинаковых точек на разных
снимках и открыл новые возможности по совершенствованию их камеральной
обработки.
В 1914 г. фирма К. Цейсса выпустила
первый универсальный прибор, изобретенный в 1908 г. Э. Орелем
(Австрия).
В России до 1917 г. фотограмметрия
применялась в основном для военных целей. Создание отечественной
фотограмметрической аппаратуры и приборов тормозилось из-за слабого развития
оптико-механического производства.
Исключительно большое значение для развития
геодезической науки и технического прогресса в России имел подписанный
В.И. Лениным в 1919 г. декрет «Об учреждении высшего
геодезического управления» (ВГУ), позже реорганизованного в Главное
управление геодезии и картографии (ГУГК). ВГУ было образовано для изучения
территории страны в топографическом отношении в целях поднятия и развития
производительных сил, производства в общегосударственном масштабе геодезических
работ и топографических съемок, создания и издания картографических материалов.
Аэрофототопографическая съемка была признана наиболее эффективным методом
решения этой грандиозной задачи.
Первый этап (I9I8-I929 гг.)
характеризуется организацией фототопографической службы, подготовкой кадров и
разработкой новой технологии создания карт. В 1919 г. в системе
Военно-топографической службы (ВТС) был создан первый аэрофототопографический
отряд. В том же году открылась Высшая аэрофототопографическая школа Красного
военно-воздушного флота. В 1921 г. в Московском (бывшем Межевом)
геодезическом институте открывается аэрофотогеодезическое отделение,
преобразованное в последующем в факультет, чем и было положено начало
подготовки инженерных и научных кадров в области фотограмметрии.
В 1925 г. общества «Добролет» и
«Укрвоздухпуть» создали производственные подразделения для аэрофотосъемки. С
этого момента началось бурное развитие фототопографической службы.
В ВТС страны под руководством Н.М.
Алексапольского был разработан комбинированный метод аэрофототопографической
съемки, который с учетом свойств одиночного снимка позволил путем
трансформирования получить контурную часть плана – фотоплан. Рельеф изображался
в виде горизонталей на фотоплане непосредственно в поле с помощью мензульной
съемки.
За рубежом для дальнейшего совершенствования
летносъемочных процессов и процессов создания по аэроснимкам планов и карт с
1918 г. до 1923 г. были построены специализированные самолеты,
созданы аэрофотоаппараты полного автоматического действия, сконструированы и
построены фототрансформаторы автоматического или полуавтоматического действия.
В 1922 г. фирмой К. Цейсса была
создана первая модель стереопланиграфа, при помощи которого по снимкам,
используя принцип стереоскопического зрения, стало возможным составление плана
с горизонталями. Приборы такого типа названы универсальными
стереофотограмметрическими приборами, а способ создания планов при помощи этих
приборов – универсальным способом стереофотограмметрической съемки.
Основные принципы взаимного ориентирования
пары аэроснимков были введены в фотограмметрию С. Финстервальдером еще в
1899 г.
О. Грубер (Германия) предложил решить эту
задачу с помощью оптико—механических устройств. Её аналитическое
решение, предложенное в 1928 г. А.С. Скиридовым, получило развитие в
трудах Н.Г. Келля, Г.П. Жукова, В. Романовского, М.Д. Коншина,
Н.А. Урмаева, А.Н. Лобанова и др. и привело к разработке способов
взаимного ориентирования снимков путем измерения поперечных параллаксов на
приборах типа стереокомпаратор.
В 1928 г. в Москве создан Государственный
институт геодезии. аэрофотосъемки и картографии (ныне Центральный
научно-исследовательский институт геодезии, аэросъемки и картографии им.
Ф.Н. Красовского). Его ученые внесли существенный вклад в развитие
топографо-геодезического и картографического производств.
Во втором периоде (1930 – 1945 гг.)
проводятся работы по совершенствованию комбинированного способа съемки и
разработки дифференцированного способа создания карт по снимкам. Универсальный
способ из-за высокой стоимости стереопланиграфа и низкой производительности в
то время для СССР был неприемлем.
В 1931 г. в Ленинграде под руководством
академика А.Е. Ферсмана организуется научно-исследовательский институт
аэросъемки, ученые которого успешно разрабатывали основные вопросы
аэрофотографии, фотограмметрии и дешифрирования аэроснимков. В 1934 г. он
переведен в Москву и вошел в состав ЦНИИГАиК.
Первыми весомыми результатами второго периода
было создание М.М. Русиновым широкоугольного и сверхширокоугольного
объективов, С.П. Шокиным и Г.Г. Гордоном – топографических
аэрофотоаппаратов. В 1933 г. выпущен стереоавтограф Ф.В. Дробышева. В
I934-I938 гг. им созданы стереометры, что послужило
основой для широкого внедрения в производство и дальнейшего усовершенствования
метода дифференцированных процессов. В теоретических исследованиях по совершенствованию
отдельных процессов фототопографической съемки активно участвовали
Н.М. Алексапольский, Ф.В. Дробышев, В.Ф. Дейнеко,
Г.П. Жуков, М.Д. Коншин, Г.В. Романовский.
Для картографирования страны с 1937 г.
начинают широко применяться методы аэрофототопографической съемки, а к 1939 г.
в системе ГУГК они стали основными способами топографических съемок. Широкое
применение получила съемка дифференцированным способом.
Успехи отечественной фотограмметрии позволили
приступить к съемкам обширной территории страны в масштабах 1: 100000,
1: 50000 и 1: 25000. К началу Великой Отечественной войны сплошное
картографирование территории страны в мелких и средних масштабах
в основном было выполнено.
В годы войны продолжались теоретические
исследования в области фотограмметрии.
Н.А. Урмаев завершил и опубликовал работу по теории фотограмметрии в
векторном исчислении, а М.Д. Коншин разработал основные теоретические положения по обработке
снимков с преобразованием связок проектирующих лучей.
Во время второй мировой войны фактически все имеющиеся
средства фотограмметрического картографирования были подчинены решению сложной
задачи создания огромного количества карт и фотодокументов для удовлетворения
нужд войны.
После Великой Отечественной войны перед
геодезией была поставлена задача завершения картографирования страны в масштабе
1: 100 000 и перехода к сплошному картографированию в масштабе 1: 25 000,
а для отдельных районов — к съемкам в более крупных масштабах. В связи с этим
потребовалось дальнейшее усовершенствование приборов и методов съемки. В 1950
г. на базе отечественной оптики был создан сверхширокоугольный многокамерный
аэропроектор — мультиплекс (М.М. Русинов, Н.В. Викторов).
Наметившаяся тенденция применения приборов
универсального типа тормозилась тем, что внедрение короткофокусных объективов
нарушило допустимые соотношения между фокусными расстояниями съемочных камер и
проектирующих камер универсальных приборов. Чтобы устранить эту проблему, была
предложена методика обработки снимков с преобразованными связками проектирующих
лучей. (М.Д. Коншин, Г.В. Романовский, Ф.В. Дробышев,
А.Н. Лобанов, Г.П. Жуков, В.Я. Финковский и др.) На ее основе
созданы отечественные универсальные приборы: стереопроектор
Г.В. Романовского и стереограф Ф.В. Дробышева. Конструкция этих
приборов упростилась благодаря тому, что аэрофотоснимки в них располагались в
одной горизонтальной плоскости. В отличие от зарубежных универсальных приборов
они позволили обрабатывать аэрофотоснимки с любым полем изображения,
могли быть установлены без специального фундамента, требовали меньшей рабочей
площади и стоили намного дешевле зарубежных аналогов. Одновременно с созданием
универсальных приборов в практику аэрофотосъемки были внедрены более надежные способы
регистрации отдельных элементов внешнего ориентирования снимков (статоскопы,
радиовысотомеры, гиростабилизирующие установки, радиогеодезические системы) и
разработаны способы их использования в процессе построения и уравнивания сетей
пространственной фототриангуляции (Г.В. Романовский, И.Д. Каргополов,
В.И. Павлов и др.). Серьезное внимание уделялось
развитию аналитических методов на основе применения высокоточных
стереокомпараторов и ЭВМ (А.Н. Лобанов, М.Д. Коншин,
И.Т. Антипов, Ф.Ф. Лысенко, В.Б. Дубиновский,
Р.П. Овсянников, В.А. Полякова, И.И. Финаревский,
С.Г. Могильный и др.). Разрабатывается технология крупномасштабных съемок
(Н.А. Соколова, К.Н. Герценова и др.). Совершенствуется аэросъемочная
оптика (Д.С. Волосов, М.М. Русинов), создаются новые приборы для
дифференциального трансформирования (Е.И. Колонтаров, Г.П. Жуков,
Ф.В. Дробышев и др.). Появляются автоматизированные стереокомпараторы (М.Д. Коншин,
В.Д. Дервиз, В.И. Кораблев и др.), многоцелевой аналитический
автоматизированный прибор стереоанаграф (Г.А. Зотов, В.Е. Копылов, А.
В. Сорока и др.) и системы для автоматизации процессов фотограмметрической
обработки снимков (А.Н. Лобанов, И.Г. Журкин, А.А. Чигирев и
др.).
Большой вклад в развитие теории и практики
фотограмметрии внесли труды В.Я. Бобира, Г.Б. Гонина,
И.Ф. Куштина, Б.К. Малявского, Р.П. Овсянникова, В.
И. Пaвлoва, H.C. Pамм, Б.H. Poдиoнoва, M.C. Уpмаeвa,
Ю.C. Тюфлина.
Активно велись исследования и по разработке
методов прикладной фотограмметрии: в горном деле для решения маркшейдерских
задач (Л.Н. Келль, С.В. Чистяков, А.П. Трунин,
И.И. Финаревский, Г.В. Забродин, С.Г. Могильный,
Л.В. Фомичев, А.В. Стрельников и др.); в геологии и геофизике для
определения координат точек и определения топографических поправок в измеренные
значения силы тяжести (В.М. Воевода, В.И. Павлов, А.Г. Прихода,
Ю.А. Жилин, А.А. Чигирев и др.); в архитектуре при инвентаризации и
восстановлении памятников истории и культуры; в промышленном и гражданском
строительстве (М.И. Буров, А.С. Валуев, Д.П. Кораблев,
Г.А. Лысков, В.М. Сердюков и др.); при изысканиях и проектировании
трасс линейных сооружений (С.А. Бутлер, Б.К. Малявский,
Э.Н. Норман, В.И. Павлов и др.); при определении глубин, изучении
волнения, течений (В.Г. Зданович, И.А. Черкасов, Ю.Д. Шариков,
Н.С. Рамм, Д.А. Янутш и др.); в сельском хозяйстве (В.Ф. Дейнеко,
В.Д. Ильинский, И.В. Байков).
В последней четверти 20 века произошел
качественный рывок в развитии злектронно-вычислительной техники. В 1970 году
создана технологи получения цифровых снимков, появились довольно дешевые
быстродействующие ПЭВМ с большим объемом памяти, обеспеченные качественным
периферийным оборудованием (графопостроители, сканеры, принтеры и т.д.).
Интенсивно разрабатывалось программное обеспечение, среди которого следует
отметить и специализированные фотограмметрические пакеты. Все это привело к
тому, что традиционные технологии составления карт по снимкам стали
вытесняться, а на их смену приходят цифровые методы. Положительные результаты
достигнуты и в нашей стране. Среди разработок следует отметить отечественные
программные продукты PHOTOMOD, Талку и ЦФС.
Появились спутниковые методы позиционирования,
что обеспечило аэронавигацию и получение координат точек фотографирования с
высокой точностью. Это существенно сокращает объем полевых работ по геопривязке
аэрофотоснимков.
Но успешное совершенствование
фотограмметрических технологий возможно лишь на базе совместного использования
материалов фотосъемки, спутниковой геодезии и автоматизированных систем
обработки информации.
2. ОПТИЧЕСКИЕ И ГЕОМЕТРИЧЕСКИЕ ОСНОВЫ ФОТОГРАММЕТРИИ.
2.1 ПОСТРОЕНИЕ ИЗОБРАЖЕНИЯ В ФОТОКАМЕРЕ.
Для фотограмметрической
съемки местности или исследуемых объектов применяются оптические системы – фотокамеры. Их очень часто
называют метрическими камерами, так как по полученным с их помощью снимкам
можно определять фотокоординаты изобразившихся на них точек (предусмотрена
возможность введения системы прямоугольных координат в плоскости снимка). При
этом искажение изображения на снимке сведено к минимуму. Обычные любительские
фотоаппараты такими свойствами не обладают, так как для них главное —
художественное качество полученных при фотографировании изображений.
Фотокамеры, используемые
для фотографирования местности с летательного аппарата, называются
аэрофотоаппаратами (или АФА) а, для фотографирования ее с точек земной
поверхности — фототеодолитами.
Изображение в фотокамере
строится на плоскости (пленке или пластинке со светочувствительным слоем, или
ПЗС матрице) с помощью объектива, представляющего собой сложную оптическую
систему собирательных и рассеивающих линз, центры кривизны сферических
поверхностей которых расположены на одной прямой линии, называемой главной
оптической осью.
Рассмотрим особенности построения изображения
объекта идеальным объективом. Они основаны на следующих законах геометрической
оптики:
— прямолинейности распространения световых лучей
в однородной среде;
— независимости распространения отдельных
световых лучей и пучков;
— обратимости лучей света;
— отражении и преломлении световых лучей на
границе двух сред.
Законы геометрической оптики позволяют сложную
оптическую систему идеального объектива заменить упрощенной моделью (линзой),
сечение которой плоскостью, проходящей через главную оптическую ось, показано
на рис. 1.
На нем: R1 и R2 – передняя и задняя
поверхности объектива; S1 и S2 – его передняя и задняя узловые точки; F1
и F2 – передний и задний главные фокусы; H1
и H2 – главные плоскости объектива (они проходят
через точки S1 и S2 перпендикулярно главной
оптической оси).
Передняя узловая точка S1
относится к пространству предметов местности и является точкой
фотографирования. Задняя узловая точка S2 относится к
пространству изображения и является центром проекции. Узловые точки обладают
тем свойством, что любой луч, вошедший в переднюю узловую точку, выйдя из
задней узловой точки, не меняет направления. Такие лучи называются центральными.
Главным фокусом объектива (линзы) называется
точка схода лучей идущих от бесконечно удаленного предмета, параллельно главной
оптической оси. Их два. Плоскости, проходящие через главные фокусы перпендикулярно
к главной оптической оси, называются фокальными плоскостями.
 |
Изображение любой
точки, например, А, фотографируемого объекта местности строится
следующим образом. Луч идущий параллельно главной оптической оси, преломляется
на главной задней плоскости H2 и проходит через задний фокус F2. Луч, проходящий через передний фокус F1,
после преломления на передней главной плоскости H1 пойдет
параллельно оптической оси. В соответствии с законами геометрической оптики
центральный луч AS входит в переднюю узловую точку S1
под углом b к оптической оси и выходит из задней узловой точки S2
под тем же углом к ней. В результате таких построений все три луча пересекутся
в точке a на плоскости P1. При этом для точек A
и a будет выполняться условие оптического сопряжения
|
|
(1) |
где d1 – расстояние
от плоскости H2 до плоскости изображения P1;
d2 – расстояние от плоскости H1
до точки фотографируемого объекта; f¢ – фокусное
расстояние объектива (рис. 1).
Говорят, что объектив,
изображенный на рисунке строит действительное, уменьшенное и перевернутое
(обратное) изображение рассматриваемого объекта.
Для точки расположенной
ближе или дальше (т.е. d2 другое), условие (1) не выполняется, поэтому ее изображение в
плоскости P1 будет иметь вид размытого кружка. Но если его
диаметр ![]() , глаз
, глаз
воспринимает изображение как четкую точку.
При фотографировании в
целях картографирования, когда расстояние d1 значительно
меньше расстояния d2 (то есть можно считать, что d2
равно бесконечности) d1= f¢ , все точки
фотографируемого объекта достаточно резко изображаются на плоскости P2
(главной фокальной плоскости), которая расположена
перпендикулярно оптической оси и проходит через главный задний фокус F2.
По этой причине в АФА и фототеодолитах плоскость изображения P, как
правило, располагается вблизи главного фокуса объектива F2 на
расстоянии чуть меньше фокусного. Смещение плоскости P2 в
сторону объектива необходимо с целью улучшения резкости изображения на краях
поля изображения, но за счет некоторого ухудшения его в центре. Величина этого
смещения выражается долями миллиметра.
Плоскость P, в
которой помещается светочувствительный материал (фотопленка или фотопластинка),
называют плоскостью изображения. Расстояние от задней узловой точки объектива S2
до плоскости изображения P называется фокусным расстоянием фотокамеры и
обозначается буквой f.
 |
Плоскость
изображения P называют плоскостью снимка, а само изображение – снимком.
Центральные лучи AS1 и BS1 принято называть
проектирующими лучами, так как они проектируют точки объекта на снимок.
Поскольку расстояние между узловыми точками мало, можно считать, что они
совпадают, и рассматривать одну точку S (рис. 2).
Называют ее центром проекции. Таким образом, изображение на снимке строится
проектирующими лучами, проходящими через общий центр проекции, поэтому можно
считать, что изображение на снимке строится по законам центральной проекции
(снимок – центральная проекция сфотографированного объекта).
Совокупность центральных проектирующих лучей
точек фотографируемого объекта образует две связки: переднюю (входящие лучи) с
вершиной в передней узловой точке объектива и заднюю (выходящие лучи) с
вершиной в задней узловой точке объектива. Так как в идеальном случае каждый
выходящий центральный луч параллелен соответствующему входящему лучу, то обе
связки можно считать совершенно одинаковыми (конгруэнтными).
2.2.
ХАРАКТЕРИСТИКА ФОТОГРАФИЧЕСКИХ ОБЪЕКТИВОВ.
Фотографические
объективы характеризуются фокусным расстоянием, относительным отверстием,
глубиной резкости, углами поля зрения и изображения, разрешающей способностью и
аберрациями.
Понятие фокусного
расстояния объектива дано выше. Его обычно определяют на специальном приборе,
называемом оптической скамьей.
Относительное отверстие
характеризует количество света, которое может проходить через объектив, или
способность объектива передавать изображение на фотопленку или фотопластинку с
определенной степенью яркости. Величина относительного отверстия зависит от
диаметра d входного зрачка (действующего отверстия) объектива и его фокусного
расстояния ![]() и находится из выражения
и находится из выражения
|
|
(2) |

Например, при ![]() и f¢=8 см относительное отверстие равно отношению 1:2.
и f¢=8 см относительное отверстие равно отношению 1:2.
Способность объектива
давать изображение большей или меньшей яркости (т.е. создавать большую или
меньшую освещенность светочувствительного слоя) называется светосилой.
Светосила объектива прямо пропорциональна квадрату диаметра его отверстия и
обратно пропорциональна квадрату фокусного расстояния.
|
|
(3) |
При сравнении светосилы
объективов необходимо сопоставлять не относительные отверстия, а их квадраты.
Пусть первый объектив имеет относительное отверстие ![]() , а второй –
, а второй – ![]() ,
,
тогда
![]()
То есть светосила первого объектив в четыре раза выше.
Следовательно, при фотографировании в одних и тех же условиях выдержка для
первого объектива будет в 4 раза меньше, чем для второго.
Величина относительного
отверстия объектива устанавливается с помощью диафрагмы. Диафрагма состоит из
тонких серповидных металлических лепестков. При вращении специального кольца
или рычажка, имеющегося на оправе объектива, лепестки уменьшают или увеличивают
входное отверстие объектива. Указатель установки диафрагмы, нанесенный на
кольце или рычажке, передвигается вдоль шкалы диафрагмы. Деления шкалы
градуируются так, чтобы каждое из них требовало увеличения или уменьшения
выдержки вдвое по сравнению с предыдущим, например 4, 5.6, 8, 11 и т.д.
Глубиной резкости
(глубиной изображения) называется способность объектива передавать одинаково
резко изображения предметов, находящихся на различных от него расстояниях.
Глубина резкости тем больше, чем меньше фокусное расстояние, больше расстояние
от объектива до снимаемого предмета и чем меньше относительное отверстие.
Если навести фотокамеру,
в которой установлен объектив с малым фокусным расстоянием, например,
8-10 мм на удаленный предмет, то на матовом стекле получится изображение
круга с различной резкостью и яркостью. В центральной части круга изображение
имеет наибольшую резкость с равномерным распределением освещения. Далее
резкость и яркость изображения уменьшается и на некотором расстоянии от центра
круга совершенно исчезает. Полученное изображение называется полем зрения
объектива. Угол, образованный лучами, соединяющими противоположные по диаметру
точки окружности поля зрения и заднюю узловую точку объектива, носит название
углол поля зрения (углол зрения). Угол поля зрения зависит от конструкции
объектива, а не от фокусного расстояния. Центральная, наиболее резкая часть
изображения называется полем изображения, а угол 2b – углом поля изображения (углом
изображения). Величина поля изображения определяет формат кадра фотокамеры и,
соответственно, формат снимка, который не должен превышать прямоугольника,
вписанного в поле изображения. У конструкций современных объективов поле
изображения весьма близко к полю зрения.
Угол изображения связан
с фокусным расстоянием ![]() и диагональю кадра соотношением:
и диагональю кадра соотношением:
|
|
(4) |

где lx и ly – размеры сторон снимка, вписываемого
в поле изображения.
В зависимости от
величины угла изображения различают объективы узкоугольные (2b < 45°), нормальноугольные
(45 – 75°), широкоугольные (75 – 100°) и сверхширокоугольные (более
100°).
Изменение освещенности в
поле зрения при равномерном освещении объекта может быть приближенно
охарактеризовано уравнением:
|
|
(5) |
где Е0 — освещенность в центре
поля зрения; b — угол между направлением луча и главной оптической осью.
Снижение освещенности,
как видно из уравнения (5), идет от центра к краям. В нормальноугольных
объективах снижение освещенности мало заметно, в сверхширокоуголъных – оно
значительно. Для получения равномерной освещенности перед объективом
устанавливают оттенитель – нейтральный светофильтр с постепенно изменяющейся
оптической плотностью, который пропускает меньше света в центре и больше к
краям.
Разрешающая способность
объектива характеризует его возможность воспроизводить раздельно в оптическом
изображении мелкие объекты. Она выражается самым большим числом линий на
1 мм, раздельно передаваемых объективом, причём ширина линий и промежутки
между ними должна быть одинаковы. В оптике указывается общее число черных и
белых штрихов, а в аэрофотографии – число пар штрихов.
Обычно в паспортах,
характеризующих объективы, записывают величину разрешающей способности,
полученную путем фотографирования специальной миры, содержащей группы черных и
белых штрихов, причем в каждой группе ширина тех и других линий постоянна. В
этом случае получают разрешающую способность системы (объектив +
светочувствительный слой), однако ее можно принять за разрешающую способность
объектива, так как она в 3–4 раза меньше разрешающей способности используемого
при фотографировании миры светочувствительного материала.
Разрешающая способность
оптической системы современных отечественных топографических аэрофотоаппаратов
в центре кадра составляют 30 – 40 лин/мм (мм-1),
на краю кадра – 10 – 15 мм-1. Разрешающая способность
является важной характеристикой, однако, она недостаточна для полной оценки
качества изображения. Для восприятия фотографического изображения большое
значение имеет контраст объектов. Способности фотографической системы
передавать контрасты объектов в зависимости от их размеров на снимке оценивается
контрастно-частотными характеристиками (КЧХ). КЧХ фотографического изображения
– функция, которая характеризует зависимость между частотой штрихов и
контрастом их изображения. Для определения КЧХ обычно используют миры с
синусоидальным распределением плотности и специальные оптические скамьи,
позволяющие построить графики КЧХ системы для различных участков поля зрения.
По графикам определяется разрешающая способность как предельное значение
частоты, при которой еще различаются отдельные штрихи.
Каждому объективу
присущи оптические недостатки: сферическая аберрация, кома, хроматическая
аберрация, дисторсия, астигматизм, кривизна поля зрения.
Фотографические
объективы в зависимости от того, в какой степени устранены в них различные
искажения (аберрация), делятся на перископы, апланаты и анастигматы.
Перископ представляет собой объектив,
составленный из двух простых линз с диафрагмой между ними. Он принадлежит к
числу объективов с большими остаточными аберрациями. Для получения резкого
изображения перископы требуют значительного диафрагмирования.
Апланат является более
качественным объективом. Основным его недостатком является астигматизм и
кривизна поля изображения, вследствие чего снимки при полном отверстии
объектива получаются резкими только в центральной части.
Анастигмат является самым совершенным типом
объективов, практически свободным от всех оптических недостатков. Он состоит из
комбинации линз различных по форме и составу стекла и при полном отверстии дает
изображение, резкое по всей площади снимка. Они и получили наиболее широкое
применение.
Объективы, в которых дисторсия сведена к
минимуму, называются ортоскопическими. Такие объективы правильно передают
геометрические формы изображаемых ими предметов. Эти качества позволили
использовать их в аэрофототопографических, наземных и репродукционных камерах.
2.3. ХАРАКТЕРИСТИКА ФОТОГРАФИЧЕСКИХ
МАТЕРИАЛОВ.
Фотографические материалы (фотоматериалы)
классифицируют:
§ по назначению (аэрофотопленки, фототехнические пленки
и др.);
§ по цвету получаемого фотографического изображения
(черно-белые, спектрозональные и цветные);
§ по строению (фотопленки, фотопластинки, фотобумага).
Все фотоматериалы имеют
подложку (основу) и светочувствительный или эмульсионный слой.
В
аэрофотографии применяются подложки из прозрачных (триацетатных или лавсановых)
пленок. При фототеодолитных съемках подложкой используемых фотоматериалов
обычно служат тонкие стеклянные пластинки.
Светочувствительный слой
фотографических материалов представляет собой тонкую прозрачную пленку, большей
частью желатиновую, содержащую во взвешенном состоянии галоидные соли серебра (бромистые,
йодистые и хлористые) в виде отдельных кристалликов-зерен. Под воздействием
света серебро освобождается, что и приводит к почернению эмульсионного слоя,
тем большему, чем интенсивнее оно было. С помощью органических красителей
(сенсибилизаторов) регулируют спектральную чувствительность эмульсии.
В аэрофотосъемочных
работах применяются фотопленки: черно-белая панхроматическая,
изопанхроматическая и инфрахроматическая; цветные спектрозональные для условной
цветопередачи (спектрозональные); цветные для натурального воспроизведения
объектов местности. При фототеодолитной съемке применяют изоортохроматические
или панхроматические пластинки.
Цветные и спектрозональные пленки
отличаются от черно-белых строением эмульсии. У цветных пленок эмульсия состоит
из трех светочувствительных слоев (рис 3): верхнего,
несенсибилизированного, чувствительного только к синим лучам; среднего,
обладающего наибольшей чувствительностью к зеленым лучам; нижнего, имеющего
максимальную чувствительность к красной области спектра. Между первым и вторым
слоями эмульсии размещен желтый фильтровой слой. Он необходим для исключения
влияния синих лучей на нижние слои.
На обратной стороне
основы нанесен противоореольный слой. Окраска его так же, как и фильтрового
слоя, уничтожается при фотохимической обработке. В процессе обработки, кроме
того, все эмульсионные слои окрашиваются в цвета, дополнительные к цветам
лучей, действовавших на них. Следовательно, правильная цветопередача
изображения может быть получена только при позитивной печати с цветного негатива на цветную фотобумагу или
диапозитивную пленку.
Спектрозональная пленка
в отличие от цветной содержит эмульсию, состоящую из двух слоев, как правило,
инфрахроматического и панхроматического. Цветопередача на этой пленке искажена,
но она позволяет получать многие
детали изображения, теряющиеся на черно-белой и цветной аэропленках.
 |
Для правильного
использования фотографических материалов необходимо знать их фотографические
характеристики: светочувствительность, контрастность, фотографическую широту,
вуаль, цветоточувствительность, разрешающую способность и др.
Определяются они по данным сенситометрических
испытаний фотоматериала. Сенситометрия – раздел фотографической
науки, посвященный учению об измерении фотографических свойств
светочувствительных слоев. Сущность испытаний в том, что различным участкам
фотоматериала, помещенного в прибор сенситометр, сообщаются различное
закономерно изменяющееся количество света Н (свет пропускается через
ступенчатый клин постепенно меняющейся оптической плотности). Затем
экспонированный материал в определенных условиях проявляется, фиксируется,
промывается и сушится. Такой негатив, состоящий из полей различной плотности,
называется сенситограммой. (Например, 1/10 прозрачность, 10 – непрозрачность,
ее десятичный логарифм = 1, это плотность D).Далее
на специальном приборе – денситометре измеряются оптические плотности D.
Результаты измерений наносят на график, по оси абсцисс которого отложены
логарифмы экспозиций ![]() , а по оси ординат – оптические плотности D. Графическое отображение зависимости D от
, а по оси ординат – оптические плотности D. Графическое отображение зависимости D от ![]() называется
называется
характеристической кривой, типичный вид которой показан на рис. 4.
 |
Различаются следующие участки
характеристической кривой. Участок от точки а до точки б,
на которой оптическая плотность остается постоянной, несмотря на увеличение
экспозиции; это почернение, не зависящее от экспозиции, называется вуалью.
Участок характеристической кривой от точки б до точки в
называется областью недодержек. Минимальное почернение от точки б, едва
отличимое от вуали и соответствующее низшей точке области недодержек,
называется порогом почернения. Участок бв характеризуется тем, что
равным приращениям логарифма экспозиций соответствует неравные между собой и
притом постепенно возрастающие приращения оптической плотности. После этого
участка следует область, где плотность возрастает равномерно, т.е. увеличению ![]() на определенную величину соответствует увеличение плотности на одну и
на определенную величину соответствует увеличение плотности на одну и
ту же величину; этот участок
представляет прямую линию и называется областью правильных, или нормальных
экспозиций. Далее скорость нарастания оптической плотности уменьшается и в
точке ![]() делается равной нулю: этот участок кривой
делается равной нулю: этот участок кривой
направлен выпуклостью вверх и называется областью передержек.
Точка ![]() соответствует
соответствует
максимальной оптической плотности, которая получается на данном фотоматериале
при данных условиях проявления. При еще больших экспозициях получаются меньшие
плотности, т.е. кривая идет вниз. Эта часть кривой называется областью
соляризации.
Характеристическая кривая позволяет определить
светочувствительность, коэффициент контрастности и фотографическую широту.
Величина вуали, которая также представляет важную характеристику, определяется
посредством измерения неэкспонированного участка сенситограммы.
Светочувствительность S – величина, обратно пропорциональная экспозиции, вызывающей после
фотообработки заданную
оптическую плотность D.
Контрастность –
способность эмульсии пленки передавать различие в яркости отдельных частей
снимаемых объектов: характеризуется коэффициентом контрастности g. Он определяется
тангенсом угла наклона между направлением прямолинейного участка характеристической
кривой и осью абсцисс:
|
|
(6) |
Коэффициент зависит и от
времени проявления. Наибольшая величина g, достигаемая при данных
условиях проявления, называется максимальным коэффициентом контрастности ![]() .
.
Уменьшение величины g после достижения ![]() связано с ростом вуали. материалы подразделяются
связано с ростом вуали. материалы подразделяются
на «мягкие» (![]() ), “нормальные” (
), “нормальные” (![]() ), «контрастные» (
), «контрастные» (![]() ),
),
«особоконтрастные» (![]() ).
).
При съемке контрастных
объектов используют мягкие фотоматериалы, для сверхконтрастных объектов –
нормальные, а для малоконтрастных – контрастные и особоконтрастные.
Фотографическая широта L фотопленки есть разность десятичных
логарифмов экспозиций начала и конца прямолинейного участка характеристической
кривой т.е.
|
|
(7) |
Она определяет диапазон
количества света, под воздействием которого получается нормальный негатив.
Величина вуали
характеризует степень почернения фотоматериала, не подвергавшегося действию
света. Для фотопленок она должна находиться в пределах 0,2–0,3.
Цветочувствительность (спектральная чувствительность) фотопленки –
чувствительность эмульсии к определенным участкам спектра и ее способность
передавать цвета снимаемых объектов с различной степенью почернения.
Разрешающая способность R — число раздельно фотографически
воспроизводимых на отрезке в 1 мм черно-белых штрихов равной ширины.
Параметр R не полностью
характеризует возможность получения фотографического изображения малоразмерных
объектов различной яркости, но пока еще является общепринятым критерием для
оценки фотографических приемников в этом отношении.
2.4 Принцип получения цифровых снимков
В настоящее время цифровые изображения
(снимки) в основном получают либо при фотографировании объектов цифровыми
камерами, либо путем сканирования их фотографических изображений.
И в том и в другом случаях изображение, сформированное
посредством объектива, (Рис 5) попадает не на пленку, а на светочувствительный
сенсор (матрицу). Свет улавливается множеством крошечных элементов сенсора
(пикселов), каждый
их которых формирует электрический заряд, в соответствии с количеством
попавшего на него света, а затем заряд преобразуется в код и запоминается в
цифровой форме. Pixel от англ. picture element — элемент изображения.

Рис. 5
В
производстве сенсоров применяются две технологии: ПЗС (прибор с зарядовой
связью, английский вариант названия — ССD — charge-coupled device) и КМОП
(комплиментарный металлоксидный полупроводниковый прибор, английский вариант — CMOS). Первая технология старше второй, а потому и сенсоры ПЗС
лучше.
ПЗС это
монолитный чип представляющий собой совокупность мельчайших
датчиков-фотоэлементов, тем или иным способом собранных в единую матрицу.
Появление
ПЗС в какой то степени связано с попыткой в начале 60-х годов прошлого века
заменить вакуумную передающую трубку твердотельным приемником изображения.
Принцип зарядовой связи продемонстрировали экспериментально в 1970 году
сотрудники фирмы Bell Laboratories У. Бойл и Дж.Смит, а уже в середине 70-х появились первые
коммерческие матрицы производства фирм Fairchild,
Bell и RCA в
США, а также Phillips в Европе, совместимые с ТВ стандартом (т.е. имеющие
разрешение по вертикали 476 и 576 строк – соответственно для американского и
европейского стандартов разложения). Ну а вскоре в Японии было налажено
массовое производство недорогих ПЗС приемлемого качества для бытовой
электроники, и на смену кинокамерам пришли видеокамеры. Революционное
воздействие оказали ПЗС на астрономию, где их появление по степени влияния
сравнимо разве что с тем, которое оказало применение фотопластинок в качестве
средств регистрации вместо человеческого глаза. Ну и, наконец, микроскопия в
медицине и биологии, компьютерное зрение и видеоконференции, системы ориентации
космических аппаратов и считыватели штрих-кода, телефакс и сканер…- все это
стало возможным и доступны благодаря ПЗС.
Для того,
чтобы понять, как ПЗС работает, представим себе МОП (металл – окисел –
полупроводник) конденсатор. В принципе это просто электрод, отделенный от
кремния (полупроводника) слоем диэлектрика. Для определенности будем полагать,
что полупроводник p – типа, то есть концентрация
дырок в нем в равновесных условиях на несколько порядков больше, чем
концентрация электронов. Если на такой электрод (его называют затвором) подать
положительный потенциал, электрическое поле, проникая через диэлектрик,
отталкивает подвижные дырки и возникает обедненная область – некоторый слой
кремния, свободный от основных носителей. При параметрах полупроводниковых
подложек, типичных для ПЗС, глубина этой области составляет около 5 мкм.
Напротив, электроны, если они каким либо образом окажутся вблизи (например, в результате фотогенерации), притянутся к затвору, и будут
накапливаться на границе раздела — окисел-кремний непосредственно под затвором,
то есть сваливаться в яму, которая совершенно официально называется
потенциальной ямой (рис. 6 а). Электроны частично нейтрализуют
электрическое поле, задаваемое в полупроводнике затвором, и возникающий в
потенциальной яме заряд будет равен количеству света
 |
попавшего на датчик.
Пусть
теперь рядом с затвором расположен еще один, и на него тоже подан положительный
потенциал, причем больший, чем на первый (рис. 6 б). Когда затворы
расположены достаточно близко, их потенциальные ямы объединяются, и электроны,
находящиеся в первой потенциальной яме, перемещаются в соседнюю, т.к. ее
потенциал выше. Если имеется цепочка затворов, то можно, подавая на них
соответствующие управляющие напряжения, передавать локализованный зарядовый
пакет вдоль такой структуры. Важно то, что для управления цепочкой затворов
любой длины достаточно трех тактовых шин (рис 6 в). Действительно, для
передачи зарядовых пакетов необходимо и достаточно трех электродов: одного
передающего (где сформировался заряд), одного принимающего и одного
изолирующего, разделяющего пары передающих и принимающих друг от друга.
Одноименные электроды таких троек могут быть соединены друг с другом в единую
тактовую шину, требующую лишь одного внешнего вывода. Это простейший трехфазный
регистр сдвига на ПЗС. Для нормальной его работы в каждый момент времени, по
крайней мере, на одной тактовой шине должен присутствовать высокий потенциал,
и, по крайней мере, на одной – низкий (потенциал барьера). При повышении
потенциала на одной шине и понижении его на шине предыдущей происходит
одновременная передача всех зарядовых пакетов под соседние затворы. А за полный
цикл (один такт на каждой фазовой шине) происходит сдвиг зарядовых пакетов на
один элемент регистра. Такое свойство ПЗС называют самосканированием.
Для локализации зарядовых пакетов
в поперечном направлении формируются так называемые стоп каналы – узкие
полоски с повышенной концентрацией основной легирующей примеси, идущие вдоль
канала переноса (Рис 3). Повышенная концентрация дырок препятствует
возникновению потенциальных ям в каналах переноса (чем их больше, тем труднее
их отогнать, и электроны там не накапливаются). Для улучшения работы (а
неприятности могут возникать из-за нарушения однородности кристаллической
решетки подложки) в 1972 году были предложены ПЗС со скрытым каналом. От
рассмотренного варианта последний отличается тем, что в поверхностной области
кремния создаемся тонкий (не более 0.5 мкм) слой с проводимостью
противоположного подложке типа и с такой концентрацией примеси, чтобы он мог
полностью обедняться при подаче на него напряжения.
 |
Первые матрицы были с
электродами, которые формировались из металла (молибдена), но была большая
вероятность замыкания металлических фаз друг на друга (а значит потеря
работоспособности матрицы). В 1974 году были предложены электроды из
поликристаллического кремния.
Достоинства ПЗС: жесткий растр,
который задается с высокой точностью в процессе изготовления, так что
геометрические качества изображения зависят только от качества оптики.
Одной из важнейших характеристик
светочувствительного сенсора является его физический размер. Размеры
сенсора определяются длиной его диагонали, и измеряются в дюймах. Стандартный
ряд типоразмеров светочувствительных матриц — 1/3, 1/2, 2/3 дюйма, есть и
больше, например 5/3. При одинаковом разрешении (количестве ячеек) матрица
большего размера лучше, чем матрица меньшего размера. Она способна воспринять
больше ступеней перепадов яркости между абсолютно-белым и абсолютно-черным
цветами. Количество этих градаций называется динамическим диапазоном и
определяется числами диафрагм: 2, 2.8, 4 и т.д.
Динамический диапазон ПЗС является
очень важной характеристикой качества изображения и соответствует понятию
фотографической широты пленки.
Другой важный параметр сенсора —
его светочувствительность, Она тоже зависит от физического размера
сенсора, точнее, от размера ячейки. Обычная светочувствительность
эквивалентна 80-200 ISO. Есть модели с очень высокой чувствительностью для
специальных съемок. Но чаще всего высокая чувствительность означает низкое
разрешение (и более низкое качество снимков с высоким разрешением). Некоторые
камеры могут менять чувствительность (автоматически или вручную от 100 до 400,
иногда 800 ISO). Увеличение чувствительности происходит на стадии обработки
информации с матрицы путем усиления сигнала. Одновременно с полезным сигналом
усиливаются и шумы, так что злоупотреблять этим нельзя. В профессиональных
матрицах размер ячейки достигает 13 мкм (правильней — квадрат со стороной в 13
мкм), что обеспечивает светочувствительность до 1600 единиц ISO.
Но наиболее важный параметр, это разрешение цифровой камеры. Оно
определяется количеством светочувствительных ячеек, расположенных на матрице.
Стандартный ряд начинается с 350 тыс. пикселов, что соответствует экранному
изображению стандарта VGA — 640×480 пикселов. Фотография
хорошего качества (без пробелов, заметных цветных точек, яркая и четкая),
снятая с разрешением 350 тыс. пикселов, при печати на струйном принтере
получится чуть больше почтовой марки. Сенсор с разрешением 1 млн пикселов
позволяет получить отпечаток размером 9×12 см и экранное представление больше,
чем XGA — 1024×768 пикселов. Отпечатки еще большего
формата — 10×15 см (самый популярный потребительский формат) получатся при
разрешении светочувствительной матрицы в 1,3 млн пикселов. Матрицы разрешением
в 2,1 млн пикселов и более позволяют получать распечатки фотографий большого
формата при умеренном динамическом диапазоне и невысокой чувствительности
цифровой камеры. Камеры с матрицами разрешением в 4 млн пикселов и более
позволяют печатать фотографии выставочного формата, но с предварительной
обработкой в графическом редакторе. Рост разрешения, естественно, приводит к
увеличению размера графического файла.
Еще одна
немаловажная характеристика светочувствительных матриц — соотношение уровней
сигнала и шумов. Это соотношение тесно связано с динамическим диапазоном
сенсора. Обычно матрицы с низким динамическим диапазоном имеют высокий уровень
шумов (около 10 — I5 дБ). Уровень шума возрастает при
увеличении чувствительности сенсора. На практике шумы проявляются в виде
различных цветовых искажений и высокой зернистости изображения. Изображение
становится структурным (словно создано из отдельных песчинок), на линиях
цветовых переходов образуются ореолы — так называемые «факелы».
Производство
сенсоров крайне трудоемкая и технологически сложная задача. Выпускают их ограниченное
число компаний, а выход годной продукции не превышает 2%. Отсюда и стоимость
цифровых фотоаппаратов.
Даже
прошедший заводскую отбраковку сенсор имеет «мертвые» участки. То есть
некоторые из элементов не работают изначально (слишком малы их размеры, слишком
велики технологические допуски при массовом производстве). Поскольку пороки эти
микроскопичны, достаточно восполнить недостаток информации с «мертвого»
светочувствительного элемента усредненным значением яркости засветки сенсора,
полученным с соседних, работающих участков. Эта операция называется коррекцией.
Интерполяция
работает так же, но служит не для коррекции изображения, полученного при помощи
сенсора, а для программного увеличения его разрешения. К примеру, сенсор с
разрешением в 1,3 млн пикселов можно заставить выдать изображение с разрешением
в 2 млн пикселов, добавив к истинным точкам дополнительные, построенные по
алгоритму усредненных значений. Ясно, что коррекция и интерполяция способствуют
снижению качества изображения, которое становится «размытым».
Простой замер интенсивности света, попавшего на ПЗС-матрицу, может
породить только черно-белое изображение, поэтому перед ней помещают цветные
фильтры.
Самой популярной технологией получения цветного изображения является
однокадровая с одной матрицей, состоящая из триад (Рис.4 слева). Перед каждым
элементом триады устанавливается микроскопический светофильтр одного из базовых
цветов (красный, зеленый, синий). Их сочетание дает полный спектр. Но
существуют еще три технологии, применяемые гораздо реже:
1)
Схема задней
развертки изображения. Она похожа на принципиальную схему планшетного сканера.
Сканирующая головка движется вдоль короткой стороны кадрового окна (сверху
вниз) и считывает информацию построчно. Сканирующая линейка состоит из трех рядов
светочувствительных элементов, каждый из которых закрыт светофильтром одного из
базовых цветов (красный, зеленый, голубой). Поскольку сканирование идет
построчно (один ряд пикселов за каждый шаг), выдержка становится недопустимо
длинной. Подобные фотоаппараты применяются только для специальной съемки в
стационарных условиях.
2)
Быстрее
работают трехкадровые фотоаппараты. В них экспозиция одного кадра производится
трижды — через светофильтр базового цвета поочередно. В результате
цветопередача получается максимального качества, но быстродействие системы не
позволяет снимать движущиеся объекты. Трехкадровые фотоаппараты применяют для
съемки архитектуры и репродукций.
3)
Альтернативой
быстродействующим системам с одной матрицей ПЗС можно считать только фотоаппараты
с тремя матрицами (Рис 8 справа),

Рис. 8
каждая из которых фиксирует
изображение за своим светофильтром одного из
базовых цветов. Специальная
оптическая система (дихроичная призма) расщепляет сфокусированный объективом
световой луч и направляет его на все три матрицы. Светофильтры, установленные
перед каждой матрицей, пропускают только свою часть цветовой характеристики.
После этого с помощью трех сенсоров картинка передается в электронный
логический блок камеры, где становится одной фотографией, записанной во
флэш-память в виде графического файла. В фотоаппаратах такую схему применяла
только фирма Minolta (в дорогих профессиональных
фотоаппаратах эта схема встречается чаще). Трехэлементный сенсор усложняет
оптическую систему камеры и увеличивает ее габариты.
Применение
сразу трех матриц позволяет получить очень высокое качество изображения. Но и
втрое повышает стоимость фотоаппарата. Три матрицы устанавливаются в сменные
крышки широкоформатных фотоаппаратов, которые стоят десятки тысяч долларов и
предназначены исключительно для профессиональной цифровой фотосъемки. В
литературе правда отмечается, невысокое разрешение (обычно 350 тыс. пикселов)
подобной схемы цветопередачи.
Важной характеристикой матрицы ПЗС
является метод считывания состояния ее ячеек. Существуют три типа сенсоров — с
построчным, покадровым и построчно-кадровым переносом зарядов, накопленных
ячейками матрицы при их засветке. Этот показатель отражает быстродействие
сенсора. Значения, собранные по всей площади сенсора, выстраиваются с высокой
точностью, создавая своеобразную «карту», на которой четко определено
физическое расположение всех цветов и их интенсивность. В результате и
получается цифровое изображение, которое записывается в виде цифрового файла.
Такой файл состоит из множества единиц информации (битов), которые затем могут
быть расшифрованы и прочитаны другим цифровым устройством, например,
компьютером или принтером.
Каждый
пиксел несет в себе информацию о цвете. Количество получаемых цветовых
оттенков определяется способностью цифровой камеры (точнее, ее
аналого-цифрового преобразователя) распознать и зафиксировать количество
градаций каждого из базовых цветов. 8-битное кодирование цветового канала
способно передать 256 оттенков цвета. При сложении базовых составляющих цвета
получится, что при 8-битном кодировании каждого канала общая разрядность цвета
составит 24 бита. При этом аналого-цифровой преобразователь способен оцифровать
изображение с общим количеством цветовых оттенков 256x256x256=16 777 216. Еще
большее количество цветов получается при 10- и 12-битном кодировании на каждый
цветовой канал, что, в общем, дает 30-или 36-битную разрядность цвета — это
прерогатива профессиональной съемочной техники.
Как отмечалось, с ростом
разрядности цвета растет и размер графического файла, в котором хранится
снимок. С ростом разрешения его размер растет еще больше.
Чтобы снимок, полученный цифровым
способом, мог хотя бы приблизиться по качеству к снимку с пленочного негатива,
каждый элемент сенсора должен иметь размер, который был бы сравним с частицей
галогенида серебра пленочной эмульсии. Речь идет об элементе величиной с
десяток микрон. Если учесть, что каждый светочувствительный элемент (пиксел)
это сочетание трех более мелких субэлементов, снабженных индивидуальным
светофильтром (красным, зеленым или голубым), то становится ясно, какая это
сложная задача. На практике даже очень качественный и большой по физическим
размерам сенсор обладает худшей разрешающей способностью, чем самая
крупнозернистая фотопленка. Именно поэтому в цифровых камерах используются
сложные механизмы программной коррекции и интерполяции изображения.
2.5 ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ СНИМКА И
ОРТОГОНАЛЬНАЯ ПРОЕКЦИЯ ПЛАНА.
Пусть А, В,
С и D (рис. 9) точки местности, а S – центр проекции. Тогда точки
пересечения а, в, с, d плоскости Р с
проектирующими лучами AS, BS, CS и DS
есть центральные проекции соответствующих точек местности. Такую же центральную
проекцию можно построить и в том случае, если плоскость проекции Р¢ провести по другую
сторону от центра проектирования и на том же расстоянии от него. Действительно,
если это сделать, то получим точки а¢, в¢, с¢ и d¢, причем согласно
условию ![]() ,
, ![]() ,
, ![]() и
и ![]() . Плоскость Р проекции дает негативное (обратное) изображение
. Плоскость Р проекции дает негативное (обратное) изображение
точек местности, а Р¢ – позитивное (прямое). То есть,
позитив получается, когда объект и плоскость проекции помещены по одну сторону
от центра проектирования, а негатив, если они расположены по разные стороны от
него. Поскольку негатив и позитив располагаются симметрично относительно центра
проекции, то они одинаковы (конгруэнтны). Отметим, что изображение объекта на
плоскости снимка, полученное в центральной проекции, называется перспективным
изображением. Если центр
проектирования перенести на бесконечно большое расстояние относительно
местности, то проектирующие лучи будут взаимно параллельны. Их пересечение с
перпендикулярной к ним плоскостью дает ортогональную проекцию точек местности.
В топографии такая проекция (при условии, что проектирующие лучи отвесны)
называется горизонтальной.
 |
Отличие между
ортогональной (горизонтальной) и центральной проекциями видно на рис. 10.
Точки местности A, B, C и D
изображаются на плоскости Р в центральной проекции в точках a, b, c, d, а в ортогональной проекции – в
точках ao, bo, co, do. При перемещении
плоскости проекции в положение Р» взаимное положение точек ao, bo, co, построенных в ортогональной
проекции, не нарушится. В то же время точки a¢, b¢, c¢, построенные в
центральной проекции, свое взаимное положение изменят.
Понятно, что для
составления плана участка местности по его изображению на снимке необходимо
перспективное изображение преобразовать в ортогональное. Но переносом центра проектирования в бесконечность такое
преобразование практически не осуществить. Поэтому необходимо найти косвенные
пути решения задачи.
2.6 ЭЛЕМЕНТЫ И СВОЙСТВА ЦЕНТРАЛЬНОЙ ПРОЕКЦИИ.
 |
Представление о
элементах центральной проекции дает рис. 11, на котором изображены:
—
Плоскость
Т, в которой располагаются проектируемые точки местности,
называется плоскостью основания (плоскостью предмета).
—
Плоскость
Р, куда проектируются эти точки, называется плоскостью изображения
(картины) или плоскостью снимка. Предполагается, что плоскости Т и
Р бесконечны и ограничение их линиями является условным.
—
Двухгранный
угол e между плоскостями снимка и основания – это угол
наклона снимка. Он произволен, но если равен нулю, то снимок считается
горизонтальным.
—
S – центр проекции.
—
Проектирующий
луч Sо, перпендикулярный к плоскости
снимка, называется главным лучом. Он должен совпадать с главной
оптической осью фотокамеры, но в точности это не выполняется.
—
Точка
о пересечения главного луча с плоскостью снимка называется главной
точкой, а расстояние Sо
— его фокусным расстоянием f.
Оно должно быть равно фокусному расстоянию фотокамеры.
—
Точка
n пересечения отвесного проектирующего луча, с плоскостью снимка
называется точкой надира. Она является изображением точки N местности, которая в момент
фотографирования находилась на одной отвесной линии (на линии перпендикулярной
основанию) с передней узловой точкой объектива фотокамеры.
—
Вертикальная
плоскость W, проходящая через точки S, о, n называется плоскостью главного вертикала.
—
След
vv плоскости W на снимке это его главная вертикаль,
а след VV плоскости W на основании называется линией
направления съемки.
—
Горизонтальный
проектирующий луч SI, лежащий в плоскости
главного вертикала W , пересекает плоскость снимка в
главной точке схода I.
—
Точка
с пересечения биссектрисы угла Sоn
(e)
с плоскостью снимка называется точкой нулевых искажений. Она обладает
важными свойствами, которые будут рассмотрены при изучении геометрической
характеристики наклонного снимка. Точки I, o, c и
n снимка располагаются на его главной вертикали.
—
Линии
hh, лежащие в плоскости P и перпендикулярные к главной вертикали,
есть горизонтали снимка. Причем, htht – линия
основания. Это линия пересечения плоскости снимка с плоскостью основания; hchc
— линия неискаженного масштаба – горизонталь, проходящая через точку
нулевых искажений c; hoho – главная
горизонталь, она проходит через главную точку снимка о; hihi – линия действительного
(истинного) горизонта – линия пересечения снимка и горизонтальной плоскости
(плоскости действительного горизонта), проходящей через центр проекции S.
Из анализа рис.11
следует справедливость следующих соотношений:
Свойства центральной проекции
1. Перспективным
изображением любой точка местности, например, А, является точка а
и притом единственная (рис. 12). Любой точке снимка, например, а
соответствует бесчисленное множество точек местности A, A1 и т.д.
2.
 |
Перспективным
изображением любой прямой пространства, например ВC, не проходящей через центр
проекции, является прямая bc, и
притом единственная. Но она изобразилась бы точкой, если бы располагалась на
проектирующем луче, например прямая DK и точка d (или
k). Любому отрезку на
снимке, например bc, соответствует
бесчисленное число отрезков местности BC, B1C1 и т.д.
3. Изображения любой
системы взаимно параллельных прямых пространства, например AB CD и т.д., сходятся на снимке в
одной точке i, которая называется точкой
схода. Для того, чтобы ее получить необходимо из центра проекции провести
проектирующий луч параллельно системе прямых пространства. Там, где он
пересечет плоскость снимка и находится точка схода (рис.13). Любая система
прямых линий, параллельных плоскости снимка, имеет точку схода в бесконечности.
Если параллельные прямые находятся на местности (в плоскости основания), то
точка схода их изображений расположена на линии hihi действительного
горизонта.
Построение изображения семейства
отрезков, лежащих в плоскости основания и параллельных линии направления съемки
(или составляющих с ним угол j), выполняют следующим
образом.
1. Отрезки продолжают до пересечения с линией
основания картины. Полученные точки, принадлежат двум плоскостям – плоскости
основания и плоскости снимка (картины).
2. На плоскости снимка находят положение
главной точки схода J, и
строят линию hihi перпендикулярную главной
вертикали (линию действительного горизонта).
3. Через центр проекции S проводят луч, параллельный
заданным отрезкам. Он будет расположен в плоскости действительного горизонта.
Пересечение этого луча с линией hihi определяет точку схода J¢ изображений отрезков.
4. Соединяют прямыми линиями точку J¢ с точками, полученными на линии
основания картины. Эти линии на снимке есть изображение лучей, идущих от линии
основания картины, через заданные отрезки и до бесконечности.
5. Проводят проектирующие лучи через точки,
ограничивающие отрезки. Их пересечение с построенными на снимке линиями и
определяет искомое изображение.
По этому правилу и
построены изображения прямых, параллельных направлению съемки (рис.14) и
прямой, составляющей с направлением съемки угол j (рис.15).
 |
Точка схода
изображений вертикальных (отвесных) прямых совпадает с точкой надира n (рис. 16). Пересечение Bo отрезка АВ с плоскостью
снимка находится на следе вертикальной плоскости, проходящей через прямую АВ
и параллельной плоскости главного вертикала,. Поэтому отрезок NBo есть изображение
бесконечного отвесного луча, идущего из точки Bo. Проекции
точек А и В принадлежат этому отрезку, значит для их
построения достаточно провести проектирующие лучи. Аналогичным образом на рис. 16
построено изображение вертикальной прямой DK. Решение задачи можно было начать и с построения точки А,
которая принадлежит плоскости основания.
Возможны и других приемы
построения изображений параллельных линий.
 |
2.7 Получение снимков местности.
При аэрофототопографической съемке снимки
местности получают путем ее фотографирования. Называют этот этап летносъемочным
процессом или аэрофотосъемкой (АФС), осуществляют — с самолёта или другого
летательного аппарата. Цель – получение не только фотоснимков, удовлетворяющих
заранее поставленным требованиям, но и показаний спецприборов, характеризующих
их положение в момент экспонирования. В наземной фототопографической съемке
фотографируют фототеодолитом, который устанавливается на штативе.
АФС можно классифицировать по количеству и
расположению аэрофотоснимков (одинарная, маршрутная и площадная), положению
оптической оси аэрофотоаппарата (плановая и перспективная) и масштабу
фотографирования (крупномасштабная — 1: 10 000 и крупнее,
среднемасштабная и мелкомасштабная — 1: 35 000 и мельче).
Одинарная АФС – фотографирование отдельных
сравнительно небольших участков земной поверхности, когда аэрофотоснимки не
перекрываются.
Маршрутная АФС – такое фотографирование полосы
местности, при котором смежные аэрофотоснимки взаимно связаны заданным
продольным перекрытием Р (рис. 17). Причем величина его достигает
60 и более процентов, поэтому возникают и зоны тройного перекрытия, что очень
важно при фотограмметрической обработке снимков. Маршрутная АФС может быть
прямолинейной, ломаной и криволинейной. Площадная (многомаршрутная) АФС –
фотографирование участка земной поверхности, который не захватить одним
маршрутом. В этом случае прокладываются несколько параллельных между собой
аэрофотосъёмочных маршрутов (рис. 18). При этом смежные маршруты
перекрываются. Называют общую часть изображений на снимках поперечным
перекрытием Q.
 |
Плановой называют аэрофотосъемку, при которой
стараются получать горизонтальные снимки, но получают наклонные с отклонением
оптической оси АФА от вертикали не более 3°. Перспективной считают АФС при наклоне оптической оси
на заданный и сравнительно больший угол.
 |
Основным видом аэрофотосъёмки является
плановая АФС. Она производится в различных масштабах, которые зависят от высоты
фотографирования Н и фокусного расстояния f АФА, в частности:
|
|
(12) |
При
получении снимков с поверхности земли в топографических целях местность
фотографируют с разных точек пространства, но так, чтобы смежные снимки
перекрывали друг друга. Оптические оси фототеодолита устанавливают при этом,
как правило, горизонтально.
2.8 ТЕХНИЧЕСКИЕ СРЕДСТВА АЭРО и
наземной ФОТОСЪЕМКИ.
2.8.1 Летательные аппараты
Аэрофотосъёмка производится с самолёта АН-30,
ИЛ-14ФК, АН-2, Л-410 или
вертолёта, например, К-26.
Практический потолок полёта самолёта АН-30 —
8000 м. Его редняя крейсерская скорость равна 440 км/час.
Кабины самолёта герметизированы. Он используется для аэрофотосъёмки в средних и
мелких масштабах.
Самолёт ИЛ-14ФК предназначен для аэрофотосъёмки в
средних масштабах. Его практический потолок полёта — 5600 м. Средняя
крейсерская скорость — 300 км/час.
Практический потолок полёта самолёта АН-2 — около
5000 м. Средняя крейсерская скорость — 180 км/час. Он используется
для аэрофотосъёмки в крупных масштабах.
Вертолёт К-26 применяется для аэрофотосъёмки
небольших участков местности в крупных масштабах. Максимальная высота полёта —
3100 м. Крейсерская скорость — 140 км/час.
Фотографирование небольших участков местности
иногда выполняют с минисамолётов, подвесных аэростатов, радиоуправляемых
авиамоделей и др летательных аппаратов. При съёмке из космоса носителем
фотографирующей системы является космический аппарат.
2.8.2 Аэрофотоаппараты
Аэрофотоаппарат (АФА) служит для получения
аэрофотоснимков земной поверхности. Он представляет собой сложную
фотографическую систему, отфокусированную на бесконечность и работающую
автоматически в сложных условиях вибраций, толчков и перегрузок.
АФА, применяемые при аэрофотосъёмке,
классифицируются по целевому назначению, принципу действия, размерам
аэроснимка, величине фокусного расстояния и типу используемых фотоматериалов.
По целевому назначению они подразделяются на топографические
и нетопографические.
Топографическими называются АФА, которые
обеспечивают получение аэроснимков с высокими измерительными и изобразительными
свойствами. Они имеют строгие оптические характеристики объектива, жёсткую
конструкцию, гарантирующую неизменность его констант, и надёжную систему
выравнивания аэрофотоплёнки в плоскость в момент фотографирования. Важно, что
на снимках, полученных топографическими АФА можно ввести прямоугольную систему
координат.
Нетопографические АФА отличаются тем, что их
конструкция не гарантирует выполнения выше указанных свойств. При
картографировании они практически не применяются и используются только для
дешифрирования объектов местности.
Аэрофотоаппараты бывают цифровые и нецифровые.
У первых в качестве сенсора используются ПЗС линейки. Они начали появляться на
рынке только с 2000 года, и пока широкого применения не имеют. Нецифровые АФА
по принципу действия бывают кадровыми, щелевыми и панорамными. Все нецифровые
топографические АФА – кадровые.
Выпускаемые отечественной промышленностью АФА
по размеру кадра, могут быть разделены на две группы: стандартные 18´18 см. и широкоформатные 30´30 см. Все топографические АФА имеют
аэрофотоснимки стандартного формата. Западноевропейский стандарт снимков — 23x23 см.
По величине фокусного расстояния АФА
подразделяются на короткофокусные (f<150 мм), среднефокусные (f=150-300 мм)
и длиннофокусные (f>300 мм), или соответственно — на узкоугольные,
нормальные и широкоугольные.
Фотографирование может осуществляться на
фотопленку или на стеклянную фотопластинку. Но второй вариант встречается
крайне редко.
Несмотря на большое разнообразие, все
топографические АФА имеют ряд общих частей и элементов. Схема его устройства
показана на рис. 19. Он имеет фотокамеру 1 и кассету 2, как правило,
съемную.
 |
Фотоамера состоит из корпуса 5,
объективного блока 6 и прикладной рамки 7, к которой в момент
экспонирования должен прижиматься эмульсионный слой фотоматериала. В нижней
части объективного блока вмонтирован объектив 8. Расстояние от задней узловой
точки S2 объектива до плоскости прикладной рамки 7
постоянно и равно фокусному расстоянию АФА. Между компонентами объектива
установлены диафрагма 9 и центральный многодисковый затвор. Конструкции
затворов рассчитаны на диапазон выдержек от 1/50 до 1/1000 сек.
и меньше.
Для надежного выравнивания аэрофотопленки в
плоскость прикладной рамки устанавливается выравнивающие плоскопараллельное
стекло 10. На нем выгравированы координатные метки, контрольные линии или
координатная сетка в виде крестов, с промежутками в 1 или 2 см. В нижней части
фотокамеры под объективом устанавливается защитное стекло 11, а между
защитным стеклом и объективом – светофильтры 12.
Кассета служит для размещения аэрофотопленки и
предохранения ее от воздействия света. В ней есть механизмы для выравнивания
пленки в плоскость и ее перемотки (направляющие валики, сматывающая 13 и
наматывающая 14 катушки).
Выравнивание осуществляется пружинным столом
кассеты 15 путем прижима пленки к плоскости выравнивающего стекла. Если
его нет, то создается дополнительное давление в фотокамере или вакуум в
кассете, и пленка прижимается к рабочей поверхности прижимного стола. В этом
случае система координат снимка (плоскости изображения) и положение его главной
точки определяются координатными метками прикладной рамки 7.
Для удобства перезарядки и эксплуатации у
большинства АФА кассеты легко отделяются от корпуса. На катушке кассеты
размещается до 120 м аэрофотопленки, что позволяет при формате кадра ![]() получить до 560 фотоснимков.
получить до 560 фотоснимков.
В нашей стране наиболее
распространены аэрофотоаппараты: АФА-ТЭ, АФА-ТЭС, АФА 41, ТАФА.
АФА-ТЭ (топографический, электрический) имеют
объективы с фокусными расстояниями 55-500 мм. Плёнка выравнивается в
плоскость вакуумным способом. Диапазон выдержек до 1/300
– 1/400 с.
АФА-ТЭС и АФА-41 являются модернизацией
АФА-ТЭ. АФА-ТЭС выпускаются с объективами, имеющими фокусные расстояния 50, 72
и 100 мм. Выравнивание фотоплёнки в плоскость осуществляется путём её прижима к
стеклу, помещённому в фокальной плоскости объектива. Диапазон выдержек до 1/700 – 1/850 с. Цикл работы фотокамер от 1,2 до 2,4 с.
АФА-41 предназначен для аэрофотосъёмок с высот
до 20 км. У АФА-42 размер кадра 30Х30 см.
В ГП «Аэрогеодезия» для получения
высококачественного фотографического изображения местности применяют
АФА-ТК-21/23 (размер кадра 23x23 см). Он может работать синхронно со
спутниковым приемником. Комплект АФА состоит из 4 блоков: пульт управления,
электронный блок, кассетный баул (2 шт.) и оптико-механический блок (камера).
Фокусное расстояние камеры 210 мм. Возможно, они изготовляются и с фокусами 150
мм и 300 мм.
Разрешающая способность аэроснимков в среднем
40-50 мм-1 в центре и 20-25 мм-1 на краю. Дисторсия объективов
различных фотокамер изменяется от 10 до 30 мкм.
За рубежом топографические аэрофотоаппараты
выпускают фирмы Германии, Швейцарии, США и других стран. В нашей стране
используются АФА MRB и LMK (Карл Цейсс), RMK (Оптон, ФРГ), RC-10
(Вильд, Швейцария). Формат их кадра 23´23 см.
2.8.3 Вспомогательное
аэрофотосъёмочное оборудование.
Для топографической аэрофотосъёмки с
летательного аппарата кроме АФА используется аэрофотоустановка 4
(рис. 19), оптический визир и командный прибор 3.
Аэрофотоустановка (АФУ) служит для крепления
АФА к носителю съёмочной аппаратуры. Она обеспечивает получение плановых
снимков и позволяет: осуществлять разворот АФА вокруг его оси; изменять
положения оптической оси камеры в пространстве; предохранять АФА от ударных
нагрузок при взлёте и посадке самолёта или вертолёта; уменьшать вибрации. Для
автоматического горизонтирования и ориентирования камеры применяют
гиростабилизирующую установку, обеспечивающую получение аэрофотоснимков с углом
наклона, не более1°.
Оптический визир предназначен для определения
в полёте интервала воздушного фотографирования и угла отклонения (угла сноса)
летательного аппарата от намеченного маршрута.
Командный прибор (КП) служит для
дистанционного управления работой фотокамеры. С его помощью устанавливается
интервал между экспозициями, выдержка затвора, ведётся счёт кадров.
Спуск затвора фотокамеры осуществляется
электрическим импульсом, посылаемым КП. Используют два их типа. Один
выдерживает постоянным интервал фотографирования, другой – заданный процент
продольного перекрытия. Первый тип КП применяют при аэрофотосъёмке равнинной и
всхолмленной местности, второй — при аэрофотосъёмке горной местности. Он
позволяет изменять интервал фотографирования пропорционально изменению высоты
фотографирования. Более совершенным является электронный командный прибор
(ЭКП), позволяющий по данным изменения путевой скорости и высоты полёта с
учётом заданного продольного перекрытия изменять величину интервала
фотографирования. Вычисляется также угол сноса и отрабатывается сигнал на
разворот АФА на этот угол. Последние конструкции гиростабилизирующей установки
позволяют по командам ЭКП автоматически разворачивать АФА на угол сноса с
точностью 45¢.
Для ослабления при аэрофотосъёмке влияния
дымки АФА снабжаются светофильтрами ЖС-18, ЖС-16, ОС-14, ОС-12 и КС-14. Их
применение приводит к увеличению выдержки и уменьшению в связи с этим исходного
контраста некоторых природных объектов. Поэтому подбираются они в зависимости
от высоты полёта, природных условий фотографирования и типа применяемой
аэроплёнки.
Большинство аэрофотосъёмок производится на
чёрно-белые изопанхроматические плёнки различных типов. Они имеют
светочувствительность от 100 до 3000 единиц ГОСТа, коэффициент контрастности от
1,5 до 3,5, разрешающую способность R от
65 до 250 мм-1.
Наиболее универсальны изопанхроматические
аэроплёнки средней чувствительности Т-17 (тип 17), Т-20, Т-22, Т-27, Т-33. Их
светочувствительность порядка 500 единиц ГОСТа, разрешающая способность до 160 мм-1,
коэффициент контрастности 1,5-2,0 и фотографическая широта до 1,2-1,5.
При фотографировании АФА со светосильными объективами
ярких малоконтрастных объектов целесообразно использовать низко чувствительную
аэроплёнку, например, Т-28. Её светочувствительность 180 единиц ГОСТа, но
преимуществом является высокая разрешающая способность (порядка 250 мм-1)
и повышенный коэффициент контрастности.
Инфрахроматические аэроплёнки используются
довольно редко вследствие низкой общей чувствительности и нестабильности. На
них хорошо изображается растительность и дешифрируются небольшие различия во
влажности объектов.
Отечественная промышленность выпускает также
спектрозональные аэроплёнки СН-6, СН-2М и СН-8 с панхроматическим и
инфрахроматическим слоями. Изображение местности на них получается в условных
цветах: длинноволновой части видимого спектра соответствует пурпурный цвет, а инфракрасной
области – голубой. Спектрозональная аэроплёнка объединяет преимущества,
имеющиеся у инфрахроматической и цветной плёнок. Она позволяет уменьшить
влияние воздушной дымки, чётко выделяет урез воды, передаёт различие во
влажности и растительном покрове. При аэрофотосъёмке на спектрозональную плёнку
применяют светофильтры (ОС-14, КС-14 и ЖС-16).
Цветные аэроплёнки позволяют получать
изображение местности в цветах, близких к естественным. В аэрофотографии для
получения цветных аэроснимков используются в основном трёхслойные
фотографические материалы с цветным проявлением, например, аэроплёнка ЦН-3. Она
имеет светочувствительность 80-100 единиц ГОСТа, разрешающую способность 50-60 мм-1,
коэффициент контрастности 0,8-1,0, фотографическую широту 0,9. Но все
характеристики плёнки ЦН-3 значительно менее благоприятны для аэросъёмки, чем у
чёрно-белых и спектрозональных аэроплёнок.
В процессе аэрофотосъёмки с помощью
специальных приборов могут быть определены превышения, высоты и координаты
точек фотографирования, а также углы наклона снимков. Использование таких
дополнительных данных приводит к сокращению объёма полевых геодезических работ,
а значит к повышению эффективности применения аэрофотоснимков, как для создания
топографических карт, так и для решения инженерных задач.
Статоскоп представляет собой дифференциальный
жидкостной барометр, измеряющий изменение давления воздуха, при изменении
высоты полёта. При аэрофотосъёмке используются статоскопы С-51 и С-51М. В них
положения уровней жидкости фиксируются фоторегистратором с помощью подсветки в
момент срабатывания затвора АФА. По данным измерения давления в точках
фотографирования вычисляют изменение высоты фотографирования относительно
изобарической поверхности. Точность определения разности высот фотографирования
зависит главным образом от состояния этой поверхности. На высотах ниже 1 км
увеличиваются ошибки за счёт неустойчивости атмосферы, а на высотах свыше 3 км
чувствительность прибора уменьшается из-за разрежённости атмосферы. Средние
квадратические ошибки определения превышений точек фотографирования по
показаниям статоскопа колеблются в пределах 0,6-1,5 м.
Радиовысотомер (РВ) служит для определения высот точек
фотографирования относительно земной поверхности. Принцип его работы основан на
измерении времени t прохождения радиоволной расстояния D от
передатчика до ближайшей точки местности и обратно к приёмнику. Расстояние D
вычисляется по формуле:
|
|
(13) |
где ![]() – скорость распространения радиоволны.
– скорость распространения радиоволны.
Значение D высвечивается либо на круговой шкале,
расположенной на экране электронно-лучевой трубки и автоматически фиксируются
фоторегистратором на плёнку, либо в цифровом виде с помощью индикаторных ламп.
В случае плоской местности расстояние, измеренное радиовысотомером, равно
высоте фотографирования Н.
Точность определения высот фотографирования
РВТД-А существенно зависит от характера местности. При съёмке водной и открытой
равнинной поверхности она равна 1,2 м. В горной местности возникают сложности в
нахождении точек отражённого импульса, что приводит к погрешности определения
высот до 5 и более метров.
От этого недостатка свободны лазерные
высотомеры, обладающие узкой диаграммой направленности излучателя и мощными
импульсами. Они бывают непрерывного и импульсного действия. Испытания лазерного
высотомера показали, что точность определения им высот фотографирования
несколько выше, чем у радиовысотомера. Лазерные высотомеры непрерывного
излучения входят в состав аэропрофилографов, которые позволяют определять
высоты точек местности с точностью 1-3 м.
Радиодальномерная станция (РДС) используется
для определения плановых геодезических координат центров проекций
аэрофотоснимков. Комплект состоит из двух-трёх наземных и одной самолётной
станций. Наземные станции устанавливают в районе аэрофотосъёмки и привязывают к
пунктам геодезической сети. Во время фотосъёмки самолётная станция непрерывно
находится в радиосвязи с наземными станциями, и в момент срабатывания затвора
АФА фоторегистратор фиксирует её показания. Расстояние от задающей
радиостанции, расположенной на самолёте, до наземных находят по разности фаз.
Точность определения координат равна 5-8 м при расстояниях до 350 км.
В последние годы в аэрофототопографии все
более широко применяют спутниковые методы определения координат, как точек
полевой подготовки, так и точек фотографирования.
Углы наклона аэрофотоснимка определяются по
фотографиям линии горизонта, Солнца и звёзд, полученным с помощью камеры
горизонта и солнечного перископа. Однако из-за невысокой точности их определения
и усложнения конструкции съёмочной аппаратуры эти приборы не получили широкого
применения при аэрофотосъёмке.
С 1980 года в АФА начала применяться цифровая
электроника. Но с появлением портативных компьютеров и глобальных навигационных
систем создавалась уже не просто аэрофотоаппаратура, а целые
аппаратно-программные комплексы. Пример – аэрофотосъемоный комплекс фирмы LH Systems.
Он включает АФА RC-30, объективы – 15/4 UAG-S (фокус 153 мм, угол поля зрения
90º) или 30/4 NAT-S (фокус 303 мм, угол поля зрения 55º), гиростабилизированную
платформу — PAV30, систему управления и контроля съемки- ASCOT с самолетной
GPS станцией и программное обеспечения пост-обработки данных — Flycin Suite+.
АФА RC-30 имеет прямой интерфейс с бортовой
навигационной системой, позволяет автоматически аннотировать кадры в процессе
съемки и проводить коррекцию. Сама камера является модульной. Необходимые
компоненты – устройства транспортировки фильма и устройства компенсации сдвиги
изображения – входят в центральный управляющий блок. Сменные модули: объективы
и кассеты для фильма. В процессе съемки камерой управляют микропроцессор, и
программное обеспечение. Диапазон продольного перекрытия снимков регулируется
от 1% до 99% с шагом 1%. Автоматический измеритель экспозиции PEM—F специально
разработан и оптимизирован для аэрофотосъемки и обеспечивает корректную
экспозицию при полетах над любым типом местности, на разных высотах носителя и
с любым типом пленки. В процессе фотографирования в негатив можно впечатывать
любые из 200 символов по выбору пользователя, например: масштаб, координаты
центра проекции, дату, время, текущий номер снимка, тип пленки и т.д.
Сменные объективы для камеры RC-30
изготавливаются с высоким качеством. Их разрешение 110-115 мм-1.
Камера имеет 8 координатных меток на стекле. Диапазоны выдержек: затвора –
1/100 – 1/1 000, диафрагмы – 1/4 – 1/22.
Вообще съемочные камеры должны
обладать высокими измерительными и изобразительными качествами, которые
подлежат проверке на фотограмметрическом тест-объекте в лабораторных условиях
или на испытательном фотограмметрическом полигоне. Относительная средняя
квадратическая погрешность определения высот точек местности при обработке
снимков испытательного полигона должна быть не менее ![]() /10 000,
/10 000,
а средняя квадратическая погрешность определения плановых координат — не более
15 мкм в масштабе снимка. Средняя квадратическая величина искажений координат ![]() ,
, ![]() крестов
крестов
контрольной сетки из-за нелинейной составляющей деформации аэропленки и
невыравнивания ее в плоскость для форматов 18х18 см, 23х23 см и 30х30 см не
должна превышать 8 мкм, 10 мкм и 14 мкм соответственно. Разрешающая способность
по полю изображения снимка не должна быть меньше той, что установленной в ТУ на
фотокамеру.
Если используются данные спутниковых
систем, следует учесть, что они отнесены к общеземным эллипсоидам WGS-84 (для
GPS) или ПЗ-90 (для ГЛОНАСС). Топографо-геодезические работы в России
выполняются в системе координат конформной поперечно-цилиндрической проекции,
рассчитанной на референц-эллипсоиде Ф.Н.Красовского (в системах координат СК-42
или СК-95). Из-за различия параметров названных эллипсоидов, а также различий в
положении начала систем координат и ориентации их осей возникает необходимость
корректировки данных GPS и ГЛОНАСС. Такая корректировка выполняется по
указаниям и с помощью программных средств, предназначенных специально для этих
целей. Важно чтобы точность спутниковых определений соответствовала
измерительной точности снимков.
В соответствии с основными положениями [
] договором на выполнение аэросъемочных работ должны быть определены:
—
Масштабы
аэрофотосъемки и составляемого плана.
—
Тип и
фокусное расстояние АФА.
—
Необходимость
применения специальных приборов (статоскопа, радиовысотомера и др.). Отметим,
что в настоящее время не вызывает сомнений необходимость применения при
аэрофотосъемке и привязке снимков спутниковых систем.
—
Сроки производства
аэрофотосъемки и сдачи продукции.
—
Состояние местности.
Какие то особенности аэрофотосъемки могут
устанавливаться заказчиком по согласованию с исполнителем.
В основных положениях определены требования к
проложению аэрофотосъемочных маршрутов, фотограмметрическому и фотографическому
качеству материалов аэрофотосъемки, аэрофотоаппаратуре, оформлению и сдаче
материалов заказчику, правила приемки и оценки их качества, а также приведены
основные технические характеристики рекомендуемых АФА и аэропленок.
Особенности, которые нужно учитывать при
проектировании летно-съемочных работ и являющиеся следствиями теории
фотограмметрии, состоят в следующем:
—
ошибка определения высоты по
паре снимков, зависит от высоты фотографирования, а значит, при заданном ее
масштабе, нужно лететь пониже и использовать АФА с фокусом поменьше (70, 100
мм);
—
широкоугольными АФА не
следует фотографировать застроенные территории, особенно, если этажность зданий
и плотность застройки велики;
—
при прочих равных условиях
смещение за рельеф обратно пропорционально фокусному расстоянию АФА, значит,
лететь следует повыше, если проектом предусмотрено составление фотоплана
(выбирают АФА в основном с фокусом 200, 350 и 500 мм);
—
в процессе проектирования
аэрофотосъемки нужно учитывать допустимый коэффициент перехода от ее масштаба к
масштабу составляемого плана, который зависит не только от конструктивных
особенностей обрабатывающего прибора, но и от разрешающей способности
аэроснимков.
В целом можно сказать, что если
проектом предусмотрено определять высоты точек местности по фотоснимкам, а
картографируемая территория плоско-равнинная, то следует использовать
широкоугольные или сверхширокоугольные камеры. Для предгорных и горных
территорий, застроенной, залесенной местности предпочтительнее
нормальноугольные и узкоугольные камеры. При картографировании городов,
особенно с многоэтажной застройкой, при выборе камеры следует учитывать
величину смещения изображения крыши здания на снимке относительно его
основания. С этой точки зрения, а также с учетом повышенных требований к
точности определения плановых координат объектов местности наиболее подходящими
являются узкоугольные камеры.
В принципе все это обобщено в нормативных
требованиях и рекомендациях (например, инструкция [15]), и их можно
придерживаться с учетом, конечно, того, что аналоговые
стереофотограмметрические приборы практически не применяются на производстве.
Для того, чтобы не учитывать разномасштабность
изображений крыш и оснований построек при составлении фотопланов, рекомендуется
фокусное расстояние АФА (в мм) подбирать, исходя из неравенства:
Fk >Lh/k,
Где h – преобладающая высота построек, м; L преобладающая протяженность построек; k –равно 20, 3.2, 0.8 или 0.2 для масштабов
1:5 000, 1:2 000, 1:1 000, 1:500 соответственно.
Иногда аэрофотосъемку производят двумя АФА с
кратным соотношением фокусов. По снимкам более крупного масштаба в этом случае
выполняют дешифрирование.
При фотографировании значительных территорий
преимущественные направления маршрутов: север – юг или запад – восток, правда,
при съемке городов более выгодными могут оказаться и другие направления,
например параллельные основным проездам. Для уменьшения объема работ по
планово-высотной привязке снимков по краям картографируемого участка
прокладывают каркасные маршруты. Они перпендикулярны основному направлению
аэрофотосъемки.
Следует помнить, что, как правило, отрицательным
фактором, снижающим объем полезной информации на снимке, являются листва на
деревьях и тени в солнечную погоду.
После фотографирования участка
местности полученные материалы изучают и оценивают. При этом проверяют:
—
полноту и
качество аэрофотосъемочных работ;
—
соответствие
фотографического и фотограмметрического качества материалов требованиям
нормативно-технических документов [7] и дополнительным условиям,
предусмотренным в договоре на выполнение съемок;
—
полноту
паспортных данных использованных съемочных систем (элементы внутреннего
ориентирования, дисторсия объектива и др.) и соответствие фактических
параметров съемочных камер проектным значениям;
—
обеспеченность
снимками картографируемой территории, ее границ (одновременно составляется
схема расположения снимков, подлежащих фотограмметрической обработке, по их
номерам);
—
наличие,
полноту и качество дополнительной бортовой информации (координат центров
проектирования снимков, полученных из спутниковых определений, данных
инерциальной системы, лазерного профилографа и др.).
2.8.4 Оборудование для
фотографирования с земли
В наземной фототопографической съемке
фотографирование местности выполняют фототеодолитами. При решении прикладных
задач используются также инженерные и стереофотограмметрические камеры, а
иногда любительские фотоаппараты, стереокамеры и кинотеодолиты.
Фототеодолиты бывают различной конструкции и
отличаются по формату кадра, фокусному расстоянию и другим характеристикам. В
СССР выпускались фототеодолиты «Геодезия», но наибольшее распространение на
горных предприятиях страны получил фототеодолитный комплект фирмы «Карл Цейсс
Йена». Фототеодолит Photheo 19/1318 этой фирмы (рис. 20) предназначен для
фотографирования местности на вертикально расположенные фотопластинки низкой
чувствительности (то есть оптическая ось камеры горизонтальна). Цифры в
названии прибора указывают приблизительную величину фокусного расстояния камеры
и формат снимков в сантиметрах. Камера 1 имеет жесткую конструкцию. Изготовлена
она из легкого сплава, На ней укреплено ориентирующее устройство 2, для
приведения оптической оси в заданное положение, и уровни для горизонтирования
прибора. Объектив 3 снабжен светофильтром ЖС-18, укреплен на суппорте и может
перемещаться по его направляющим параллельно вертикальной оси камеры вверх и
вниз от центрального положенияс шагом 5 мм. В задней части в фокальной
плоскости объектива расположена прикладная рамка 4, к которой в момент
фотографирования с помощью прижимного устройства 5 прижимается фотопластинка.
На прикладной рамке укреплены координатные метки с отверстиями. Они фиксируются
на фотопластинке и служат для введения прямоугольной системы координат. Кроме
того, в фокальной плоскости объектива установлены регистраторы и индикаторы,
позволяющие зафиксировать на каждой фотопластинке величину фокусного расстояния
камеры, номер снимка, положения объектива в момент экспозиции и направление j оптической оси (вид съемки). Номера фотоснимков от 0 до 99 можно
устанавливать с помощью барабанчиков, расположенных на боковой поверхности
камеры. Указатель вида съемки имеет 6 положений:
A
— нормальный вид съемки с левой точки базиса (j = 0°)
AL
– отклоненный случай влево(j = 31.5°)
AR – отклоненный случай вправо (j = -31.5°).
B, BL и BR –те же варианты съемки, но с правой точки базиса
фотографирования. Указанные выше углы обеспечивают составления плана участка без
разрывов, при минимальном перекрытии. Поэтому угол j = 31.5° называют
стандартным. Ориентирное устройство — это фактически теодолит технической точности.
Затвора и фокусировочного устройства фототеодолит не имеет.
Фирмой «Карл Цейсс Йена»
 |
выпускалась универсальная измерительная
камера UMK 10/1318, 20/1318 и 30/1318, а также стереокамера SMK
5.5/0808. Первая может быть использована как для выполнения инженерных съемок,
так и при наземной фототопографической съемке. В ее комплект входит
аккумуляторная батарея напряжением 12В, обеспечивающая работу затвора и
индикаторных ламп. Затвор может работать и механически. Вторая предназначена
для фотографирования объектов, расположенных на расстояниях не более 40 метров.
Они имеют постоянный базис 400 или 1200 мм. В маркшейдерии могут быть полезны
при изучении трещиноватости горных пород на карьерах.
2.8.5 Основные характеристики фотограмметрических
цифровых камер
Для аэрофотосъемки местности фирмой LH Systems
создана цифровая аэрофотосъемочная система высокого разрешения и точности ADS40. В
основе ее технического решения положена концепция трехлинейчатого сканера,
впервые предложенная в 1970 году компанией DLR (Германский аэрокосмический центр) и активно
использовавшаяся в системах дистанционного зондирования, как космических, так и
самолетных. Исходя из этой концепции, в фокальной плоскости объектива системы
взаимно параллельно расположены три ПЗС линейки, отстоящие друг от друга таким
образом, что одна из них обеспечивает панхроматическую съемку в направлении вперед,
другая – в направлении точки надира, а третья — в направлении назад (Рис. 21).
Причем, вместо одной линейки в каждом из положений
используются пары линеек, смещенные одна относительно другой на 0.5 пиксела.
Число элементов в каждой ПЗС линейке 12 000, значит в паре разрешение в
два раза больше. Кроме панхроматических, в фокальной плоскости расположены еще
4 одинарные линейки по 12 000 элементов в каждой. Они предназначены для
мультиспектральной съемки в четырех узких зонах спектра: ближней инфракрасной (835-885),
красной (610-660), зеленой (535-585) и синей (430-490). Размер элемента
ПЗС-линейки 6.5 мкм. Фокусное расстояние объектива 62,77 мм. Угол поля зрения
(поперек направления полета) 64°. Углы
стереонаблюдений 14.2°, 28.4°, и 42.6°.
 |
По разрешению съемка рассматриваемой
системой сопоставима с аэрофотосъемкой аналоговым АФА в масштабе 1:10 000,
если сканирование снимков выполнить с размером пиксела 12 мкм. Это позволяет
обеспечить картографирование вплоть до масштаба 1:2 000. Фактором, ограничивающим
разрешение на местности, является интервал времени (период) между считыванием
информации с линеек, равный 1.2 мсек.
При скорости движения самолета 100 м/сек. разрешение
на местности в направлении движения будет примерно равно 25 см. Такое же
разрешение получается в поперечном направлении, если высота полета равна
2400 м. Ширина полосы захвата при этом будет равна 3 000 м.
Следует отметить, что геометрические свойства
полученного системой изображения принципиально отличаются от геометрии обычного
аэрофотоснимка. В этом случае каждая строка, получаемая в результате считывания
информации с ПЗС линейки, представляет собой центральную проекцию некоторой
линиии на поверхности земли. Причем значения элементов внешнего ориентирования
для каждой такой строки отличаются между собой из-за изменений угловой
ориентации и перемещения самолета. Работать с таким изображением невозможно. По
этой причине исходные изображения (им присваивают уровень 0) подвергаются
геометрическому трансформированию с учетом элементов ориентирования каждой
строки, получаемых с помощью системы позиционирования и ориентации (Position and Orientation System—POS).
Такие трансформированные изображения (уровень 1) уже можно измерять, в том
числе и в стереорежиме. Для выполнения указанных операций нужно специальное
программное обеспечение.
Важнейшими компонентами системы является: собственно
датчик, включающий объектив и пластину с ПЗС линейками; инерциальное
измерительное устройство, жестко связанное с датчиком; системы подогрева и
охлаждения; устройство управления датчиком, включающее компьютер, программное
обеспечение, GPS-приемник и память на жестких дисках.
Система также включает операторский интерфейс
(жидкокристаллический дисплей высокого разрешения, монтируемый в специальной
подвеске, гасящей вибрацию самолета).
Запоминающее устройство из 6 дисков по 36 Гб каждый
смонтировано в герметизированном корпусе, предохраняющем диски и от вибрации.
Скорость передачи данныз 45 Мб/сек.
 |
В нашей стране изготовителем кадровых многоматричных цифровых аэрофотоаппаратов «4/90» и «6/90» универсального
назначения является НТЦ «Радар». Цифровые снимки, полученные этими камерами, ориентированны
на создание и обновление топографических и специальных карт и планов городов
масштабов от 1:500.
Фотоприемный элемент — гибридный, на
основе цветных ПЗС- матриц с прогрессивной разверткой. Экспонирование матриц в
кадре — синхронное. Обеспечивается получение одноцветного (raw-12) изображения. Формат эквивалентного кадра — 24 000Х1 200 пикселов
(АФА 4/90) и 27 000Х1 200Х2 полосы (АФА 6/90); постоянный угол
стереозасечки – 10˚). Обеспечивается формирование выходного кадра, полностью
эквивалентного гомоцентрической центральной проекции. Используется
специализированный объектив с постоянным, фокусным расстоянием 92мм. Разрешение
по полю — 300 лин/мм, относительное отверстие- 1:2,8- 1:5,6. Угол зрения в направлении «поперек полета»- 50 -56º. Минимальный
интервал фотографирования – 0,5 с. Диапазон высот применения – от 1 500 м
(5 см/пиксел) до 8 000 м (26 см/пиксел). Аэрофотоаппараты обладают
уникальной в своем классе производительностью – выходное изображение
формируется со скоростью до 200 Мбайт/с. При этом, обеспечивается возможность
работы с перекрытием 60-90 % в полосе 0,9 высоты полета при скорости носителя
0-900 км/ч.
Обработка результатов фотографирования
возможна любым распространенным пакетом – например, LPS 8.7 + Orthobase фирмы
Leica Geosystems. Имеется программное обеспечение (ПО) управления съемкой,
визуального и приборного контроля качества фотографирования, астрокалибровки. Управляющее
ПО и аппаратура изделий обеспечивают:
Регистрацию GPS-координат точки
фотографирования и профиля полета носителя по курсу, тангажу и крену с
использованием собственной твердотельной инерциальной навигационной системы.
Артефакты движения носителя компенсируются приводами камеры.
Установку в надирный обогреваемый (в зимнее
время) аэрофотолюк размером 200х200 (АФА 4/90) или 300х300 (АФА 6/90) мм, а
также в закрытый отапливаемый герметизируемый (обитаемый) отсек носителя.
Имеется установочное оборудование для носителей Ан-30, Ан-2, Л-410. Может быть
установлена арматура для нестандартной установки. Потребление энергии менее 600
Вт. Минимальная высота фотографирования1400 м. Размер проекции пиксела на
местности, см/высота, м/скорость носителя максимальная, км/ч- 10/2750/350;
15/4100/500; 30/8200/900.
Комплект поставки АФА (450х350х350 мм, 26 кг), сервер бортового
управления, накопитель 1,6 Т байт (230х370х200 мм, 11,5 кг), антенна GPS с
кабелем до 1 м, интерфейсные кабели длиной по 6 м (2 шт.), установочный
комплект, преобразователь питания — по спецификации потребителя.
Аэрофотокамеры UltraCam D. Основной принцип камеры
базируется на использовании множества распространенных и доступных ПЗС матриц,
объединенных в единую 90 мегапиксельную координатную систему с единым центром
перспективы. Принцип работы модульный, и в базовой конфигурации состоит из
модуля сенсоров и модуля обработки и хранения изображений. Их краткие
характеристики сведены в таблицу.
 |
В сенсорном модуле находятся 8 объективов,
4 из которых отвечают за съемку четырех каналов цветного изображения, а 4
расположенных в один ряд объектива отвечают за формирование черно-белого
изображения из девяти ПЗС матриц. Один из черно-белых объективов является
основным, за которым находятся 4 угловых ПЗС матрицы, обеспечивающие базовую
геометрию выходного изображения. За остальными тремя черно-белыми объективами
находятся соответственно две вертикальные, две горизонтальные и центральная
матрицы изображения с которых накладываются с перекрытием и программно
сшиваются с четырьмя базовыми. Каждый объектив «срабатывает» с
задержкой 1-2 миллисекунды (в зависимости от скорости полета) относительно
предыдущего, что обеспечивает съемку из одной точки всех частей выходного
изображения. Такой подход обеспечивает получение детального изображения с
большим захватом и хорошей геометрией без дорогостоящего оборудования и
трудоемких математических преобразований.
Модуль обработки и хранения состоит из 15
объединенных в сеть компьютерных блоков и массива из 30 дисков, на котором
хранятся как исходные необработанные изображения, так и снимки, прошедшие
постобработку. Причем процесс обработки может проходить целиком на борту, а
может продолжиться на Земле путем подключения модуля к более мощным наземным
станциям обработки. Выходная разрядность в 14 бит обеспечивает лучшую
радиометрию, а четыре раздельных цветных канала позволяют более полно и точно
охватить спектральный диапазон.
.
|
Характеристики изображения |
|
|
Формат |
Эквивалент |
|
Объем |
Эквивалент |
|
Форматы |
TIFF, JPEG, Tiled TIFF |
|
Характеристики |
|
|
Размер |
11500 |
|
Размер |
9 мкм |
|
Размер |
103,5 |
|
Фокусное |
100 мм |
|
Диафрагма |
1/5,6 |
|
Угол |
55° |
|
Разрешающая |
5см |
|
Характеристики |
|
|
Число |
4 (RGB |
|
Размер |
4008 х |
|
Размер |
9 мкм |
|
Фокусное |
28 мм |
|
Угол |
65° |
|
Диапазон |
1/500 |
|
Производительность |
>1 |
|
Разрядность |
14 бит |
|
Радиометрическое |
> |
|
Размеры |
45 х |
|
Вес |
<30кг |
|
Бортовой |
|
|
Объем |
> |
|
Количество |
>2775 |
|
Размеры |
40 х |
|
Вес |
<50 |
|
Потребляемая |
150 |
|
Источник |
|
|
Номинальное |
24В / |
|
Время |
10 |
|
Размеры |
45 х |
|
Вес |
2 х |
Максимальная скорость съемки составляет 0,75 секунды
на кадр. При высоте полета 1500 м. размер покрываемой одним кадром территории
составляет 1550 х 1012 м. Односекундный интервал съемки обеспечивает 95%
перекрытия кадров, тем самым каждая точка поверхности может быть отснята 20
раз. Более востребованным, как правило, является перекрытие 60-70%, и в таком
режиме система обеспечивает 6 часов непрерывной съемки.
V-STARS – это система для промышленной фотограмметрии.
Она включает одну или несколько цифровых камер с фокусным расстоянием 17 мм.
Камера INCA2 4.2 имеет разрешение ПЗС матрицы
2 033х2 044 пикселей. Ее размер -18.2х18.4 мм, а угол поля зрения —
56°х56°. У камеры INCA2
6.3 указанные выше параметры имеют следующие значения: 2 033х3 072
пикселей 18.4х27.6 мм и 56°х76°.
В комплект системы входит компьютер, программное
обеспечение и аксессуары (набор марок, жезлы для масштабирования, камера, куда
помещается фотоаппарат при работе в экстремальных условиях, и проч.).
Система обеспечивает работу, как в режиме реального
времени, так и в режиме off line. Измерение визирных целей на цифровых
фотоснимках можно выполнять в автоматическом режиме. Разработчики системы
гарантируют, что при соблюдении технологии съемки и измерений можно обеспечить
точность определения параметров объекта с ошибкой 1:100 000.
3. АНАЛИТИЧЕСКИЕ
ОСНОВЫ ОДИНОЧНОГО СНИМКА
3.1. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА.
Для установления связей между точками объекта и их
фотографическими изображениями используются пространственные и плоские системы
координат. Если картографируемый участок захватывает больше, чем 1 зону может
использоваться геоцентрическая система координат (рис.22). В ней за начало
координат принят центр общеземного эллипсоида О’г, а
плоскостью X‘г Y‘г
является плоскость экватора. Ось X‘г
находится в плоскости начального меридиана, а ось Z‘г совмещена с полярной осью О’г Р. Система координат
правая. За фигуру Земли принимается эллипсоид вращения с полуосями а и b и
сжатием е. Любая точка О пространства задаётся геодезическими координатами:
широтой В, долготой L и высотой Н. Геоцентрические
координаты X‘г,
Y‘г, Z‘г
точки О находят по их геодезическим координатам, с
помощью известных формул сфероидической
геодезии.
Может использоваться и прямоугольная система
координат X«г Y«г Z«г,
представленная на рис.22. Она сохраняет все преимущества геоцентрической
системы, но абсолютные значения координат точек в ней меньше. Ось Z«г нормальна к поверхности эллипсоида в начальной точке О
картографируемого участка; ось Y«г
совпадает с направлением на север. Система координат правая. За начало счёта
высот принимается такое значение, при котором аппликаты всех точек
положительны. Координаты X«г,
Y«г, Z«г, легко получаются из геоцентрических X‘г, Y‘г,
Z‘г путём трёхмерного преобразования, включающего
перенос начала координат и их вращение.
При решении задач на сравнительно
небольшом участке местности используется известная левая система прямоугольных
координат Oг Xг Yг Zг (рис.23) Гаусса.
На практике часто находит применение местная
система пространственных прямоугольных координат Xг Yг Zг с началом в некоторой точке А картографируемого участка
(рис.23). В этой системе ось Zг нормальна к поверхности квазигеоида в точке А, ось Xг горизонтальна и параллельна осевому меридиану
зоны, в которой находится участок съёмки, а ось Yг направлена на восток. Координаты начала
задаются в системе Ог Xг Yг Zг.
Системы координат Ог Xг Yг Zг и А Xг Yг Zг в фотограмметрии принято называть геодезическими.
Координаты точек местности, полученные по
результатам измерения снимков, определяются, как правило, в так называемой
фотограмметрической пространственной прямоугольной системе координат SXYZ (рис.23). Она правая. Ее начало и направление
координатных осей выбираются так, чтобы наиболее просто осуществлялся переход
от координат точек снимка к координатам точек местности. Обычно начало
координат совмещается с точкой фотографирования S
или с какой-либо точкой местности, а плоскость XY
устанавливается горизонтально или параллельно плоскости одного из снимков.
Поскольку системы координат X Y Z и Xг Yг Zг не совпадают, то при переходе от фотограмметрических координат к
геодезическим необходимо выполнять преобразование координат из системы в
систему.
На каждом снимке по его периметру имеется ряд
координатных меток, которые определяют плоскую прямоугольную систему координат o‘ x y. Такая система при наличии на снимке четырёх меток 1,
2, 3, 4 показана на рис. 24. Начало координат находится в точке о’
пересечение отрезков 1-2 и 3-4. Ось x совмещается с прямой 1-2, а ось y с
перпендикуляром к оси x в точке о’. Возможны и другие
варианты. Например, ось y – это главная вертикаль, а ось x — одна из горизонталей и
т. д. Отметим, что на наземных снимках оси обозначают буквами x и
z, а координаты в системе координат снимка иногда
называют фотокоординатами.
![]()
Положение точка на снимке определяется
координатами x и y, но это можно сделать и в пространственной
фотограмметрической системе X‘Y‘Z‘ (рис.25). Начало координат этой системы всегда совмещено с точкой
фотографирования S, а оси X‘, Y‘, Z‘ параллельны осям X, Y, Z фотограмметрической системы координат точек
объекта местности или осям геодезической системы координат.
Связи между плоскими и пространственными
координатами точек снимка и местности устанавливаются через элементы
ориентирования снимка.
3.2. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКА.
Элементами ориентирования снимка называются
величины, определяющие его положение в момент фотографирования относительно
выбранной пространственной прямоугольной системы координат. Различают элементы
внутреннего и внешнего ориентирования снимка.
Элементы внутреннего ориентирования
позволяют найти положение центра проекции относительно снимка, а значит
восстановить связку проектирующих лучей, существовавшую в момент
фотографирования. К ним относятся координаты главной точки x0, y0 снимка и фокусное расстояние f
фотокамеры (рис.26).
Элементы внешнего ориентирования (ЭВО)
позволяют установить положение снимка (связки), которое она занимала в момент
фотографирования относительно заданной пространственной прямоугольной системы
координат. Для снимков, полученных АФА, на практике используют две таких
системы.
В первую систему ЭВО (рис. 27)
входят координаты Xs, Ys, Zs точки фотографирования, а также углы поворота снимка α,
ω и κ
Продольный угол наклона снимка α образуется
осью Z΄ и
проекцией главного луча Sо на плоскость X΄ Z΄.
Поперечный угол наклона снимка ω
заключён между главным лучом Sо и его проекцией на плоскость X΄ Z΄.
Угол поворота снимка κ образуют ось у
снимка и след плоскости, проходящей через главный луч Sо и ось Y΄ (в этой плоскости находится угол ω).
На рис. 27 углы κ и ω
положительные, угол α — отрицательный.
Вторая система (рис.28) ЭВО содержит:
—
координаты Xs, Ys, Zs точки
фотографирования;
—
t – дирекционный угол оптической оси фотокамеры – он
образуется следом плоскости главного вертикала W и
положительным направлением оси X΄;
—
ε — угол наклона снимка, находится в плоскости
главного вертикала между главным и надирным лучами;
—
κ – угол поворота в плоскости снимка,
образуется главной вертикалью ![]() и
и
осью y плоской системы координат x y.
На рисунке изображены положительные углы.
Различают абсолютные и относительные ЭВО
снимка. Абсолютные элементы определяют положение связки в геодезической системе
координат.
Таким образом, положение одиночного снимка
определяется девятью элементами ориентирования, из них три — элементы
внутреннего ориентирования и шесть — элементы внешнего ориентирования.
![]()
3.3. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ
СНИМКА.
При изучении теории фотограмметрии и решении
практических задач используются зависимости между плоскими координатами x, y
точек снимка и их пространственными координатами X‘, Y‘, Z‘. Эти зависимости можно установить, если известны элементы внутреннего
и угловые элементы внешнего ориентирования снимка.
Введём для этого систему координат S x y z с началом в точке фотографирования S (рис. 29). Координатные оси x, y
этой системы расположим параллельно соответствующим осям на снимке, а ось z
совместим с главным лучом связки So. Тогда координаты x, y любой точки снимка
в пространственной системе имеют те же значения, что и в плоской, а координата z для всех точек постоянна и равна фокусному
расстоянию снимка (z = —f).
Системы S X‘ Y‘ Z‘ и S x y z имеют общее начало, поэтому в процессе
преобразования координат из одной сиситемы в другую следует выполнять только
вращение, что выражается, например, формулой:
|
|
(14) |

Ортогональная матрица А имеет третий порядок и называется
матрицей преобразования координат. Ее элементами являются 9 направляющих
косинуса, поэтому выше приведенное соотношение можно записать и так:
|
|
(15) |

Причем, каждый из направляющих косинусов это косину угла между
соответствующими осями систем координат участвующих в преобразовании, то есть:
|
|
(16) |

Отметим, что в формуле 16 не произведения
координат, заключенных в скобках, а обозначение осей, между которыми берется
угол.
В силу ортогональности направляющие косинусы
матрицы связаны между собой шестью независимыми уравнениями:
|
|
(17) |

Один поворот в пространстве можно заменить
тремя последовательными поворотами в плоскости (вокруг осей Z,
X и Y, рис.30). Им будут соответствовать матрицы ![]() , Аω, и Аα..
, Аω, и Аα..
В соответствии с рис. 26 для каждого из поворотов соотношение 16 можно
представить следующим образом:
Общая матрица
преобразования A равна произведению:
А = Аα Аω![]()
После перемножения матриц и получим формулы для вычисления направляющих
косинусов. В данном случае они будут иметь вид:
|
|
(18) |

Таким образом, направляющие косинусы а1,
а2, а3,…..,с3 зависят от
трёх угловых элементов внешнего ориентирования снимка и являются координатами
единичных векторов, определяющих взаимное положение рассматриваемых систем
координат: X‘ Y‘ Z‘ и x y z.
Аналогично для второй группы элементов
внешнего ориентирования снимка можно получить:
|
a1 = cos(X΄, x) = cock sint + a2 = cos(X΄, y) =- sink sint + a3 = cos(X΄, z) =- sinε cost b1 = cos(Y΄, x) =- cock cost + b2 = cos(Y΄, y) = sink cost + b3 = cos(Y΄, z) =- sinε sint c1 = cos(Z΄, x) = sinε sink c2 = cos(Z΄, y) = sinε cosk c3 = cos(Z΄, z) = cosε |
(19) |
Формулы (18) и (19) позволяют установить связь между элементами
ориентирования и направляющими косинусами разных систем ЭВО:

Можно было бы
привести и еще ряд соотношений.
Переход от пространственных координат к плоским осуществляется по
формулам:
|
|
(20) |

где АТ
– транспонированная матрица А.
Если начало координат снимка не совпадает с его
главной точкой, то вместо координат x и y в формулах 14,15,16 и 20 следует использовать
разности x – xо
и y
— yо.
Формулы (14) – (20) справедливы для любых
значений угловых элементов внешнего ориентирования снимка.
Для плановых снимков, когда α, ω и ![]() малы, с точностью до членов
малы, с точностью до членов
второго порядка малости можно записать:
|
|
(21) |

Если же учитывать
только члены первого порядка малости, то:
|
|
(22) |

Для случая, изображенного на рис. 29 матрица A будет единичной,
то есть:
|
|
(23) |
Полученные зависимости между системами
координат X‘ Y‘ Z‘
и x y z используются в
аналитических способах определения координат точек местности по измерениям
снимков.
3.4. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Точка местности М и её изображение на снимке т находятся
на одном проектирующем луче (рис.31). Положение точек S и М
в системе координат местности X Y Z определяется векторами соответственно ![]() , а положение точек т и М в системе
, а положение точек т и М в системе
координат S X‘ Y‘ Z‘ – векторами ![]() .
.
Векторы ![]() коллинеарны,
коллинеарны,
поэтому
|
|
(24) |
где λ – скаляр, а ![]()
Спроектируем векторы ![]() на
на
координатные оси X, Y, Z, тогда:
|
|
(25) |

Из третьего равенства (25) найдем λ и
подставим его выражение в первое и второе. Тогда:
|
|
(26) |
Так как
![]()
то
|
|
(27) |
Или, с учётом равенства (15)
|
|
((28) |

Итак, если элементы ориентирования снимка
даны, то два уравнения (27) имеют три неизвестных. Отсюда следует, что
пространственные координаты точки местности по одиночному снимку не определить.
Можно получить лишь ее плановое положение. Но надо знать высоту
фотографирования H = — (Z – ZS).
В фотограмметрии часто используются обратные
зависимости (между координатами точки снимка и координатами соответствующей
точки местности). Для их получения, спроектируем векторы ![]() равенства (24) на координатные оси
равенства (24) на координатные оси
системы координат S x y z (рис.
31), в результате получим:
|
|
(29) |

Решим третье уравнение относительно λ и
подставим его значение в первое и второе уравнения. Тогда:
|
|
(30) |
Матрицы-столбцы равенств (29) можно
представить в виде:
|
|
((31) |
|
|
((32) |


Подставив выражения проекций векторов r и R из (31) и (32) в
(30), будем иметь:
|
|
(33) |

Формулы (28) и (33) справедливы при любых
значениях элементов ориентирования снимка.
Пусть x0 = y0 = 0, XS
= YS
= 0, ZS
– Z = H, тогда при условии расположения осей как на
рис. 24 (снимок можно считать горизонтальным) формулы (28) и (33) будут
выглядеть следующим образом:
|
|
(34) |
|
|
(35) |
где x0, y0 – координаты точки горизонтального снимка.
Предположим теперь, что снимок наклонный, но
при этом ![]() Матрица преобразования координат A
Матрица преобразования координат A
будет иметь вид:
|
|
(36) |

И при указанных выше условиях (x0 = y0 = 0, XS
= YS
= 0, ZS
– Z = H), получим:
![]()
и ![]() (37)
(37)
Уравнения (37) записаны для случая, когда
начало координат на местности совмещено с точкой S или N, а на снимке — с главной точкой о.
Если же начала координат перенести соответственно в точки C и
c, то соотношения станут еще более простыми:
|
|
|
(38) |
При условии, что за начало координат на местности
принята точка N, а на снимке – соответствующая ей точка
надира n, справедливы следующие соотношения;
|
|
(39) |
Уравнения (38) и (39) легко получить из соотношения 37 и переносом
систем координат на снимке и в пространстве.
3.5. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ ГОРИЗОНТАЛЬНОГО И НАКЛОННОГО
СНИМКОВ.
В фотограмметрии часто применяются зависимости между
координатами точек горизонтального и наклонного снимков. Их легко получить из
уравнений (28) и (34), с учетом того, что ZS – Z = H и координаты главной точки равны нулю. Левые
части этих уравнений выражают одни и те же величины – координаты X и Y точки местности. Поэтому справедливо:

Откуда
|
|
(40) |

Таким образом, если даны его угловые элементы
внешнего ориентирования, то по формулам (40) можно перейти от координат точек
на наклонном снимке, к координатам соответствующих точек на горизонтальном
снимке. Этот процесс называется трансформированием координат. Они справедливы
при любых значениях угловых элементов внешнего ориентирования снимка.
Подставив в уравнения (40) выражения направляющих
косинусов из (21), после преобразований с точностью до членов второго порядка
малости получим:
|
|
(41) |

Приведенные формулы проще, но они перестали быть строгими.
Строгие и простые соотношения можно написать,
если начало координат на снимке и на местности совместить с точкой нулевых
искажений с, тогда с учетом уравнений (34) и(38) получим:
|
|
(42) |


3.6. МАСШТАБ СНИМКА.
Масштабом снимка 1/m в
данной точке по данному направлению называется отношение бесконечно малого
отрезка dl на
снимке к соответствующему отрезку dL на местности. То есть:
|
|
(43) |
Пусть местность равнинная, а начала
координат в пространстве и на снимке расположены соответственно в точках S и o, (рис. 32).
Обозначив проекции отрезков dl и dL на соответствующие координатные оси через dx,
dy и
dX, dY, с учетом данного определения масштаба и рис.
32 напишем:
|
|
(44) |
где φ – угол между осью x снимка и заданным направлением отрезка dl.
При указанном выборе систем координат, и при условии, что оси ординат
расположены в плоскости главного вертикала, справедливы уравнения (37)
зависимости между координатами точек местности и снимка. Продифференцируем их
по переменным x и
y, в результате получим:
 .
.
Введём обозначение:
![]() .
.
и учтем, что dy=dxtgj, тогда
|
|
(45) |
Подставив выражения dX и dY из соотношений (45) в формулу (44), будем
иметь:
|
|
(46) |

Полученное равенство показывает, что масштаб
снимка зависит от фокусного расстояния АФА, высоты фотографирования, угла
наклона снимка, положения точки на снимке (координат x и y), в которой взят
элемент dl и от направления φ этого элемента относительно
линии главного вертикала ![]() .
.
Определим значение масштаба 1/m
для частных случаев.
1. Масштаб горизонтального снимка (ε = 0). Подставив это
значение в формулу (46), с учетом принятых обозначений k и p получим:
![]() ,
,
т. е. масштаб горизонтального снимка плоской местности
во всех точках постоянный.
2. Масштаб наклонного снимка по направлению главной вертикали (x
= 0, φ =
90°):
|
|
(47) |

На основании уравнения (47) запишем значение
масштаба 1/m в характерных точках, лежащих на линии главного
вертикала:
В главной точке снимка o (y = 0)
![]() ;
;
В точке нулевых искажений с ![]() ,
,
поэтому:
![]() ;
;
В точке надира n ![]() , после подстановки получаем:
, после подстановки получаем:
![]() ;
;
В главной точке схода ![]()
![]() .
.
Таким образом, масштаб в точке
нулевых искажений равен, в главной точке мельче, а в точке надира крупнее
масштаба горизонтального снимка. Масштаб в точке нулевых искажений называется
главным масштабом снимка.
3. Масштаб наклонного снимка по направлению горизонтали (φ
= 0°)
|
|
(48) |
Поскольку в уравнении абсцисса точки отсутствует, то вдоль горизонтали,
если местность равнинная, мосштаб величина постоянная.
Запишем выражения 1/m
для горизонталей, проходящих через характерные точки снимка:
По линии действительного горизонта ![]() ,
,
поэтому:
![]() ;
;
Вдоль главной горизонтали ![]() , после подстановки
, после подстановки
имеем:
![]() ;
;
На линии неискажённого масштаба ![]() ,
,
значит
![]() ;
;
По горизонтали hnhn, проходящей через точку надира ![]() , и:
, и:
![]() .
.
Выполненный анализ показал, что масштаб снимка
в точке c по любому направлению равен масштабу горизонтального
снимка.
3.7. СМЕЩЕНИЕ ТОЧЕК И Искажение
направлений, ВЫЗВАННОЕ НАКЛОНОМ СНИМКА.
Из формулы 42 следует справедливость
пропорции:
![]()
А это означает, что если наклонный
снимок совместить с горизонтальным, вращением его вокруг линии неискаженных
масштабов (рис. 33.) то соответствующие точки окажутся на одном луче,
проходящем через точку нулевых искажений c.
Разность
|
|
(49) |
называется смещением точки за наклон снимка. И понятно, что направлено
оно вдоль луча, проходящего через точку c.
Очевидно, что в выше приведенную пропорцию
между координатими можно включить отношение r0/r, тогда, с учетом соотношений (42), и того что ![]() ,
,
будем иметь:
 ;
;
Подставив это равенство в уравнение (49),
после преобразований получим:
|
|
(50) |
Из формулы (50) видно, что смещение ![]() возможно как в сторону точки нулевых искажений, при jÎ(0°, 180°), так и в противоположную сторону. Максимально оно на
возможно как в сторону точки нулевых искажений, при jÎ(0°, 180°), так и в противоположную сторону. Максимально оно на
главной вертикали (φ равно 90° или 270°). На линии неискаженных
масштабов точки за наклон не смещаются.
Величина смещения зависит и от фокусного
расстояния снимка. С его увеличением она уменьшается. Для планового снимка (![]() 3°) величину максимального смещения точек
3°) величину максимального смещения точек
можно оценивать по приближенной формуле:
|
|
(51) |
Оно приводит к ошибкам в определении по снимкам направлений, расстояний
и площадей.
На рис. 33, кроме того, видно, что не
изменился и угол j, значит, если
вершиной горизонтальных углов местности будет точка C,
то на снимке они не искажаются.
Рассмотрим еще раз совмещенный чертеж (рис
34), введя дополнительно линию Ea на наклонном снимке и, соответствующую ей
линию, на горизонтальном снимке. Как было показано, точки на линии неискаженных
масштабов не смещаются, что относится и к точке E, а точка ao
изменила свое положение. В результате изменилось направление Eao
на угол dA.
Этот угол и называют искажением горизонтального направления на наклонном
снимке. Не трудно заметить (рис.34), что ![]() , и с
, и с
учетом приближенного соотношения (50), а также того, что Ea=rtgj,
получим
|
|
(52) |
Формула (52) подтверждает, что направления не
искажаются, если они проходят через точку нулевых искажений (т.е. при r=0),
а также показывает, что и направления горизонталей не искажены (j=90°). Искажение
максимально приj=90°. И если снимок плановый, то его можно оценить по
приближенной формуле:
3.8. СМЕЩЕНИЕ ТОЧЕК И НАПРАВЛЕНИЙ НА СНИМКЕ, ВЫЗВАННОЕ РЕЛЬЕФОМ
МЕСТНОСТИ.
Рельеф местности также вызывает смещение
точек, причем по направлениям проходящим через точку надира п, в которую
сходятся изображения отвесных прямых. То есть, если h —
превышение точки А над точкой В, расположенной в плоскости
предмета, и отрезок АВ отвесный, то точка а на снимке сместится
относительно точки b на величину ab = δrh (рис. 35). При h > 0
смещение происходит от точки надира, когда h < 0, – к точке надира.
Предположим, что снимок является
горизонтальным, тогда SN=H, Sn=f, и если отрезок ab на снимке обозначить через r,
то из прямоугольных треугольников можно составить следующие пропорции:
![]()
![]()
![]()
Теперь, путем последовательной подстановки получаем:
|
|
(54) |
Можно доказать, что полученная формула дает
хорошую оценку величины смещения точек за рельеф и для плановых снимков.
Значит, по измеренной на плановом снимке величине смещения ![]() можно в ряде случаев с достаточной для
можно в ряде случаев с достаточной для
практики точностью определить высоту отдельных объектов (дерева, столба,
здания, трубы и т. д.).
 |
Смещение точек за рельеф приводит на
снимке и к искажению направлений отрезков, иногда довольно значительному. Для
простоты рассмотрим горизонтальный снимок, на котором изображены отрезок AB и
его горизонтальная проекция AoB (рис.36). Искажением
направления за рельеф является угол dA. В соответствии с теоремой синусов
(треугольник aaob), имеем:
![]()
Обозначим отрезок an через r, тогда очевидно aao – смещение drh точки A за
рельеф. Из рис. 36 следует, что sinj =d/r и AoB=h/tgn, тогда, с учетом того, что aob= fAoB/H
и формулы (54), получим:
|
|
(55) |
Анализ формулы (55)показывает, что при d=f искажение направления отрезка может оказаться
равным его угла наклона.
3.9. ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ СНИМКА
Для решения ряда фотограмметрических задач
необходимо знать элементы ориентирования снимка.
Его элементы внешнего ориентирования могут
быть получены либо с помощью специальных приборов в процессе аэрофотосъёмки
либо в камеральных условиях по геодезическим и фотокоординатам опорных точек.
Второй вариант назвали обратной пространственной фотограмметрической засечкой.
Математической основой ее решения являются прямые или обратные уравнения
коллинеарности.
Рассмотрим один из возможных способов
математического решения засечки, основанный на применении уравнений (33).
Пусть на снимке изобразились точки местности,
геодезические координаты которых известны (такие точки называют опознаками), и
координаты x, y этих точек определены по данным измерений
снимка. Примем, что элементы внутреннего ориентирования снимка даны. Тогда
неизвестными величинами в формулах (33) окажутся координаты XS,,
YS,, ZS центра проекции снимка и три угла ![]() . Указанные уравнения нелинейны по
. Указанные уравнения нелинейны по
отношению к неизвестным, поэтому последние определяются способом приближений.
То есть, вначале из каких-либо соображений принимают приближенные значения
неизвестных, а затем определяют поправки к ним, используя технику уравнивания
параметрическим способом. Таким образом, задачу решают следующим образом:
1. Определяют приближенные значения элементов внешнего ориентирования
снимка. Например, угловые величины принимают равными нулю, а координаты центра
проекции определяют по данным бортовых измерений или каким-либо другим
способом.
2. Выполняют измерение с целью определения координат x и y опознаков на снимках.
3. Приближенные значения элементов внешнего ориентирования, а также
элементы внутреннего ориентирования и заданные координаты опознаков подставляют
в уравнения (33) и вычисляют координаты x¢ и y¢
изображений опознаков на снимке. В силу погрешностей измерений, неточности
приближенных величин, принятых в качестве неизвестных, и других причин
вычисленные координаты не будут равны измеренным.
4. Составляют уравнения поправок, принимая разности l
между измеренными и вычисленными координатами точек на снимке в качестве их
свободных членов. Указанные уравнения будут иметь вид:
|
|
(56) |
где ![]() — поправки в приближённые значения
— поправки в приближённые значения
элементов внешнего ориентирования снимка; lx=x
— x¢ ; ly=y — y¢ ; ![]() ,
, ![]() – поправки в измеренные координаты x,
– поправки в измеренные координаты x,
y. Численные значения коэффициентов a,
b,…, g‘ уравнений (56) вычисляются как частные
производные функций x, y (уравнения 33) по соответствующим переменным.
Например:
![]() и т.д.
и т.д.
Система уравнений (56) содержит шесть неизвестных. Один опознак
позволяет составить два уравнения, поэтому для решения задачи их должно быть не
менее трех.
5. При избыточном количестве опознаков система линейных уравнений
решается при условии
![]()
где Р –
матрица весов измеренных координат точек снимка.
То есть составляют и решают нормальные уравнения. Для системы (56) они
имеют вид:
|
|
(57) |
где В – матрица коэффициентов a, b,…,g‘ для опорных точек снимка; δ – вектор
поправок ![]() ; l – вектор свободных членов уравнений (56).
; l – вектор свободных членов уравнений (56).
Решая уравнения (57), определяют вектор поправок
|
|
(58) |
6. Вводят поправки δ к приближённым значениям элементов внешнего
ориентирования, получают уточнённые значения неизвестных. Поскольку исходная
система (35) нелинейная, а приближённые значения могут существенно отличаться
от искомых величин, вычисления повторяют, начиная с пункта 3, и продолжают их
до тех пор, пока разность векторов δ двух последних приближений не
станет меньше установленного допуска. Такой путь решения называют методом
итераций.
7.
Выполняют оценку точности
решения задачи. Для этого в последнем приближении вычисляют весовые
коэффициенты Q и поправки V. Средние
квадратические ошибки элементов вычисляют по формуле:
|
|
(59) |
где i = 1, 2, 3,…,6 – номер поправки δ в уравнениях
(56).
Ошибка единицы веса находят из соотношения
|
|
(60) |
где п – число опорных точек.
Иногда, например, при калибровке камер,
возникает задача определения и элементов внутреннего ориентирования снимка. В
этом случае необходимо дополнить матрицу δ поправками ![]() , а матрицу В – коэффициентами h,
, а матрицу В – коэффициентами h,
m, n, h‘, m‘, n‘ при определяемых поправках. Поскольку
количество неизвестных увеличивается до 9, число опознаков необходимых для
решения задачи, должно быть не менее 5, а ошибка единицы веса должна
определяться по формуле:
|
|
(61) |
Следует иметь в виду, что при аэрофотосъёмке
равнинной местности включение дополнительных неизвестных в систему уравнений
поправок приводит к ухудшению обусловленности матрицы системы нормальных
уравнений. Это приводит к снижению точности определения искомых величин.
4. Теория
пары снимков.
4.1 Стереоскопическая пара
снимков и элементы ее ориентирования
Два снимка с изображениями одного и того же
участка местности, полученные с двух точек пространства, называются
стереоскопической парой снимков (стереопарой). Снимок, полученный с точки
фотографирования S1, называется левым, а с S2 – правым.
На рис. 37 изображена пара снимков в
положении, которое она занимала в момент фотографирования. А – точка
местности, изобразившаяся на снимках в точках а1 и а2.
Они называются соответственными или одноимёнными точками. Проектирующие лучи S1A и S2A, проходящие через эти точки называются
соответственными или одноимёнными проектирующими лучами.
 |
Расстояние В между точками
фотографирования S1 и S2 – базис фотографирования.
Плоскость WA, проходящая через базис и точку А
местности есть базисная плоскость.
Плоскости, проходящие через базис
фотографирования и главные лучи являются главными базисными плоскостями (W1 — левого W2 — правого снимков).
Любая пара соответственных лучей пересекается,
если снимки занимают положение, которое было в момент фотографирования.
Совокупность их точек пересечения образует поверхность. Ее называют стереомоделью
или просто моделью местности. При выше названных условиях она совпадает с
земной поверхностью, значит масштаб такой модели 1:1.
Представим теперь, что одна из связок
(например, правая) поступательно перемещается вдоль базиса из положения S2 в S2¢. Модель при
этом не разрушится, но изменится ее масштаб. Расстояние bп между центрами проекций двух связок, по
которым построена модель, называется базисом проектирования, и ее масштаб
вычисляется по формуле:
|
|
(62) |
Существует понятие элементы ориентирования стереопары.
К ним относят рассмотренные ранее элементы ориентирования (внутреннего x0, y0, f и внешнего XS, YS, ZS, α, ω, и κ) каждого из образующих ее
снимков, таким образом, общее их число 18. Если фотографирование местности с
точек S1
и S2
выполнено одним и тем же АФА, то стереопара имеет 15 элементов ориентирования.
Другую тройку угловых элементов внешнего ориентирования снимков на практике
также используют, но значительно реже. В системах координат снимков положение
точек a1 и a2 (изображений точки А местности)
определяется координатами x1, y1 и x2, y2 соответственно.
4.2 Зависимость между координитами
точки местности и координатами ее изображения на паре снимков
Получим уравнения связи между координатами
точки A местности и координатами ее изображений на паре
снимков, исходя из предположения, что элементы ориентирования стереопары
известны.
Для решения этой задачи используем в качестве
исходной систему координат XYZ с началом в точке фотографирования S1 левого снимка (рис. 38). Вектор ![]() определяет в этой системе положение точки
определяет в этой системе положение точки
фотографирования S2 правого снимка, а вектора ![]() и
и ![]() — положение точек А и ее
— положение точек А и ее
изображения а1 на левом снимке соответственно. Точки а2
правого снимка и А местности определяют вектора ![]() в
в
системе координат S2XYZ. Ее начало находится в точке S2, а оси параллельны соответствующим осям
системы координат S1XYZ. Векторы ![]() известны, поскольку
известны, поскольку
принято, что элементы ориентирования снимков даны. Искомым является вектор ![]() .
.
В силу коллинеарности векторов ![]() имеем:
имеем:
|
|
(63) |
где N – скалярный множитель.
Векторы ![]() также коллинеарны, поэтому
также коллинеарны, поэтому
![]()
Согласно рис. 38 ![]() или, с учётом
или, с учётом
уравнения коллинеарности (63), ![]() Поэтому можно записать:
Поэтому можно записать:
![]()
Решая это равенство относительно N, получим
|
|
(64) |
Или, с учетом соотношения (63):
|
|
(65) |
Уравнение (65) — векторное Выразим
искомую зависимость в координатной форме.
Векторные произведения векторов ![]() можно представить в виде определителей
можно представить в виде определителей
третьего порядка:
 ,
,
где ![]() — единичные векторы координатных осей X, Y,
— единичные векторы координатных осей X, Y,
Z;
BX, BY, BZ – координаты вектора ![]() ,
,
определяющие положение точки фотографирования S2 в системе координат S1XYZ;
X1‘, Y1‘, Z1‘ и X2‘, Y2‘, Z2‘ –
пространственные координаты соответственных точек а1 (вектора
![]() ) и а2 (вектора
) и а2 (вектора ![]() ) на первом и втором снимках.
) на первом и втором снимках.
Разложив определители по элементам первых строк, получим:
![]()
Векторные произведения векторов ![]() , а также
, а также ![]() есть
есть
вектора ![]() и
и ![]() ,
,
направленные перпендикулярно к базисной плоскости WA. По этой причине они коллинеарны.
На основании их коллинеарности формулу (64)
можно записать в виде следующих пропорций:
|
|
(66) |
Пространственные координаты X‘,Y‘,Z‘,
входящие в уравнения (72), вычисляются по формулам (14-18). Составляющие базиса
фотографирования определяются через линейные элементы ориентирования пары
снимков:
|
|
(67) |

Спроектируем векторы ![]() на
на
координатные оси X, Y, Z.
Тогда в соответствии с равенством (63) будем иметь:
|
|
(68) |

Рассмотренная задача определения
пространственных координат точки местности по её изображению на снимках
стереопары называется прямой пространственной фотограмметрической засечкой. Ее
решение значительно проще для идеальной пары снимков. Случай съемки называется
идеальным, если снимки получены с одной и той же высоты фотографирования, а их
углы ![]() При указанных условиях справедливо:
При указанных условиях справедливо:
|
|
(69) |

Примем, что ось X
совпадает с направлением базиса фотографирования, а ось Y
параллельна плоскости снимков. Тогда BZ = BY = 0, BX = B, и из второго отношения пропорции (66) имеем:
|
|
(70) |
Разность абсцисс p соответственных
точек, измеренных на паре снимков, называется продольным параллаксом, т.е.:
|
p |
(71) |
Тогда
|
|
(72) |
Подставив выражение N из (72) в (68), с учётом (69) получим:
|
|
(73) |

и
|
|
(74) |
В соотношениях (73) и (74) ![]() – (высоте фотографирования над
– (высоте фотографирования над
точкой местности). Поэтому, согласно формуле (74), параллакс p0 можно определить из соотношения:
|
|
(75) |
Оно показывает, что продольный параллакс
соответственных точек идеальной пары снимков равен базису фотографирования в
масштабе снимков.
Формулы (69-75) справедливы и для нормального
случая съемки (главные луч перпендикулярны к наклонному базису и взаимно
параллельны, а угловые элементы внешнего ориентирования относительно
фотограмметрической системы координат равны нулю). При этом предполагается, что
ось X совпадает
с базисом, а ось Z — с главным лучом левого снимка.
По паре горизонтальных снимков сравнительно
просто решается задача определения превышений точек местности. Примем, что
высота точки А местности известна. Тогда превышение точки М над
точкой А:
|
|
(76) |
Подставив в (76) для каждой из точек выражение из (74), получим:
![]()
Разность продольных параллаксов ![]() обычно обозначают через
обычно обозначают через ![]() , поэтому, опуская индексы, можно
, поэтому, опуская индексы, можно
записать:
|
|
(77) |
Углы наклона снимков не превышающие 3°,
практически не влияют на точность определения превышений между близко
расположенными точками. Поэтому формула (77) широко используется для
определения высот отдельных объектов и по плановым снимкам (например, деревьев,
домов, заводских труб, глубин оврагов и т.д.).
Иногда удовлетворительный результат получается
при использовании приближенной формулы:
|
|
(78) |
где b – базис фотографирования в масштабе снимка.
Для оценки точности определени превышения
продифференцируем функцию (78) по входящим в неё переменным b,
Δp, H и перейдём к средним квадратическим ошибкам.
В результате получим
|
|
(79) |

где mh – средняя квадратическая ошибка определения
превышений;
mb, mΔp, mH – средние квадратические ошибки определения
базиса фотографирования, разности продольных параллаксов и высоты
фотографирования соответственно.
На практике влиянием mb и mH пренебрегают, и для оценки используют приближённое
соотношение:
|
|
(80) |
Оно показывает, что величина ошибки mh прямо
пропорциональна высоте фотографирования (или фокусному расстоянию АФА, при
заданном масштабе аэрофотосъемки) и обратно пропорциональна базису
фотографирования.
4.3 Элементы взаимного ориентирования
пары снимков
Взаимное ориентирование снимков стереопары это
установка их в положение, при котором любая пара соответственных лучей
пересекается, то есть обеспечивается построение модели. Величины, определяющие
такое положение снимков, называются элементами взаимного ориентирования (ЭвзО).
На практике выполнение условия пересечения
соответственных лучей достигается поворотом обоих снимков или поворотами и
смещениями только одного из них при неподвижном положении второго. В
соответствии с этим различают две системы элементов взаимного ориентирования. В
первой неподвижными считают базис фотографирования и главную базисную плоскость
левого снимка; во второй – левый снимок.
Первая система элементов. Начало системы координат S1X1‘Y1‘Z1‘– в
центре проекции S1 левого снимка Р1 (рис. 39). Ось X1‘ совмещена с базисом фотографирования, а ось Z1‘ установлена в главной базисной плоскости левого снимка. Система
координат S2X2‘Y2‘Z2‘ параллельна
системе координат S1X1‘Y1‘Z1‘.
Элементами взаимного ориентирования являются:
![]() — угол в главной базисной плоскости
— угол в главной базисной плоскости
левого снимка между осью Z1‘ и
главным лучом связки;
![]() — угол на левом снимке между осью y1 и следом плоскости
— угол на левом снимке между осью y1 и следом плоскости ![]() ;
;
![]() — угол в главной базисной плоскости
— угол в главной базисной плоскости
левого снимка между осью Z2‘ и
проекцией главного луча правой связки на главную базисную плоскость левого
снимка;
![]() — угол между проекцией главного луча
— угол между проекцией главного луча
правой связки на главную базисную плоскость левого снимка и главным лучом;
![]() — угол на правом снимке между осью y2 и следом плоскости
— угол на правом снимке между осью y2 и следом плоскости ![]() .
.
Вторая система элементов. За начало пространственной
фотограмметрической системы координат принимается центр проекции левого снимка S1. Координатные оси ![]() этой
этой
системы направлены параллельно соответствующим координатным осям x1, y1 левого снимка (рис. 40), а ось ![]() совпадает
совпадает
с главным лучом левой связки. Система координат ![]() параллельна
параллельна
системе координат ![]() .
.
Элементами взаимного ориентирования
являются:
![]() — угол между осью
— угол между осью ![]() и
и
проекцией базиса на плоскость ![]() (или элемент
(или элемент
ориентирования By);
![]() — угол наклона базиса S1S2 относительно плоскости
— угол наклона базиса S1S2 относительно плоскости ![]() (или BZ);
(или BZ);
![]() — взаимный продольный угол наклона
— взаимный продольный угол наклона
снимков, составленный осью ![]() с проекцией главного
с проекцией главного
луча правой связки на плоскость ![]() ;
;
![]() — взаимный поперечный угол наклона
— взаимный поперечный угол наклона
снимков, заключённый между плоскостью ![]() и
и
главным лучом правой связки;
![]() — взаимный угол поворота снимков, угол на
— взаимный угол поворота снимков, угол на
правом снимке между осью y2 и следом плоскости ![]()
Таким образом, каждая система включает пять
элементов взаимного ориентирования. Зная их, можно по формулам (66-68) найти
пространственные фотограмметрические координаты любой точки модели.
4.4
Уравнение взаимного ориентирования пары снимков
По условию взаимного ориентирования пары
снимков необходимо, чтобы для любой точки М (рис. 39 и 40) векторы ![]() лежали в одной плоскости, т.е.
лежали в одной плоскости, т.е.
выполнялось условие компланарности трёх векторов
|
|
(81) |
В координатной форме это условие выражается
равенством нулю определителя третьего порядка, составленного из координат
векторов: ![]() (составляющих базиса фотографирования Bx , By , Bz),
(составляющих базиса фотографирования Bx , By , Bz), ![]() , (координат
, (координат ![]() ) и
) и ![]() (координат
(координат
![]() ):
):
|
|
(82) |

Определитель (82), записанный на основе
условия компланарности, может быть получен из решения уравнений коллинеарности
(27), записанных для одной и той же точки местности, изобразившейся на паре
снимков, полученных с точек фотографирования S1 и S2.
В соответствии с этими уравнениями, связи
между координатами точки местности X, Y, Z и
координатами её изображения на левом ![]() и правом
и правом ![]() снимках имеют следующий вид:
снимках имеют следующий вид:
![]()
![]()
![]()
![]()
Поэтому:
![]()
![]()
Решив первое (или второе) уравнение относительно Z и
подставив результат во второе (или первое) уравнение, после преобразований
запишем:
![]()
Так как,![]() то полученное уравнение
то полученное уравнение
является результатом разложения определителя (82) по элементам первой строки.
Условие (82) не нарушается, если вектор ![]() заменить коллинеарным вектором
заменить коллинеарным вектором![]() .Эта замена равноценна изменению масштаба
.Эта замена равноценна изменению масштаба
модели местности.
Запишем уравнение (82) для двух рассмотренных
систем элементов взаимного ориентирования пары снимков.
При использовании первой системы составляющие
базиса фотографирования By = Bz = 0, a Bx = B, поэтому:

или
|
|
(83) |
А с учетом формул (15):
|
|
(84) |
где x1, y1 и x2, y2 – координаты соответственных точек на левом и правом снимках; ![]() — направляющие косинусы матрицы
— направляющие косинусы матрицы
преобразования координат левого снимка; ![]() — то
— то
же правого снимка.
Направляющие косинусы вычисляют по формулам (18) с использованием
угловых элементов ![]() для левого снимка и
для левого снимка и ![]() для правого.
для правого.
Для второй системы элементов согласно
рис. 40
|
|
(85) |
Поэтому определитель (82) имеет вид:
|
|
(86) |

В результате его разложения по элементам первой строки получим:
|
|
(87) |

Как и в первом случае, координаты ![]() можно вычислить по формулам (15) и (18),
можно вычислить по формулам (15) и (18),
приняв ![]() для левого снимка и
для левого снимка и ![]() — для правого.
— для правого.
Воспользуемся формулой (15) и заменим
пространственные координаты ![]() плоскими координатами
плоскими координатами
точек пары снимков. При этом учтём, что ![]() В
В
результате получим:
|
|
(88) |

где ![]() — направляющие косинусы матрицы
— направляющие косинусы матрицы
преобразования координат правого снимка.
Уравнения (84) и (88) справедливы для любых
значений элементов взаимного ориентирования. Для плановых снимков можно
использовать их приближенный вариант. Так, на основании зависимостей (21) с
точностью до членов первого порядка малости для первой системы элементов
(верхняя строчка для левого снимка, нижняя – для правого) имеем:
|
a1‘= b2‘= |
(89) |
|
a1«= b2«= |
для второй системы элементов:
|
a1‘= b2‘= |
(90) |
|
a1«= b2«= |
Подставив указанные выше значения направляющих косинусов соответственно
в уравнения (84) и (88), после преобразований получим:
для первой системы элементов –
|
|
(91) |
для второй –
|
|
(92) |
где
|
|
(93) |
Величина q называется поперечным параллаксом.
В коэффициентах при элементах взаимного
ориентирования принято, ![]() так как для плановых
так как для плановых
снимков это существенно не влияет на точность результата.
Из формул (91) и (92) видно, что если элементы
взаимного ориентирования, равны нулю, то поперечный параллакс q во
всех точках ориентирования отсутствует.
4.5 Определение элементов взаимного
ориентирования
Взаимное ориентирование пары снимков
определяется пятью элементами. Следовательно, для их определения необходимо
измерить на снимках координаты как минимум пяти соответственных точек,
составить для них систему уравнений взаимного ориентирования и решить её
относительно неизвестных величин.
На практике точек берут больше пяти, поэтому
задачу решают методом итераций по способу наименьших квадратов (как это было
сделано при определении элементов внешнего ориентирования снимка). Например,
для первой системы:
1. Принимают нули в качестве приближенных значений элементов взаимного
ориентирования снимков пары.
2. Выполняют измерение с целью определения координат соответственных
точек x1 , y1 и x2 , y2.
3. Приближенные значения элементов взаимного ориентирования, а также
элементы внутреннего ориентирования и измеренные координаты соответственных
точек подставляют в уравнения (83), которое является функцией искомых величин,
то есть ![]() Из-за погрешностей измерений, неточности
Из-за погрешностей измерений, неточности
приближенных величин, принятых в качестве неизвестных, и других причин
указанная выше функция равна нулю не будет. Обозначим полученные значения через
li, где i номер
соответственной точки.
4. Принимают li, в качестве свободных членов, составляют уравнения поправок ![]() , которое в общем случае выглядит
, которое в общем случае выглядит
следующим образом:
|
|
(94) |
где υ – остаточная величина невязки уравнения взаимного
ориентирования, Коэффициенты перед поправками —
частные производные функции (83) по соответствующим неизвестным. Например,
коэффициенты a и b
могут быть вычислены по формулам:
![]()
Уравнений составляют столько, сколько измерено соответственных точек.
5. При избыточном их количестве система линейных уравнений (94)
решается при условии:
![]()
где Р –
матрица весов измеренных координат точек снимка.
То есть составляют и решают нормальные уравнения по формулам (57) и
(58), в результате чего определяют вектор поправок.
6. Вводят поправки δ к приближённым значениям элементов
взаимного ориентирования, получают уточнённые значения неизвестных, которые
опять принимают за приближенные значения и т. д. В качестве критерия точности
определения элементов взаимного ориентирования, можно использовать величины
поправок δ, поправок υ или остаточных параллаксов
|
|
(95) |
вычисляемых
после каждого приближения для всех точек ориентирования. Ординаты ![]() определяются
определяются
по второй формуле (40) через полученные элементы взаимного ориентирования и
измеренные координаты x, y соответственных точек левого и правого снимков.
Для оценки точности определения элементов
взаимного ориентирования в последней итерации находят весовые коэффициенты Qjj и поправки ![]() . По этим данным вычисляют ошибку единицы веса
. По этим данным вычисляют ошибку единицы веса
|
|
(96) |
а по формуле (59) — средние квадратические
погрешности определения ЭВзО.
При плановой аэрофотосъёмке искомые
величины могут быть получены из решения приближенных уравнений (91) или (92).
Используют, как правило, не 5, а шесть точек, и располагают их по стандартной
схеме (рис. 41). Координаты соответственных точек 1÷6 приведены в таблице.
Примем, они будут такими, если местность равнинная ![]()
|
таблица |
|||
|
№ точки |
x1 |
x2 |
y |
|
1 |
0 |
-b |
0 |
|
2 |
b |
0 |
0 |
|
3 |
0 |
-b |
a |
|
4 |
b |
0 |
a |
|
5 |
0 |
-b |
-a |
|
6 |
b |
0 |
-a |
Такой выбор позволяет получить относительно простые
зависимости между элементами взаимного ориентирования и поперечными
параллаксами q. В первой системы ЭвзО, если подставить
координаты для каждой из точек в уравнение (91)получим:
Величины ![]() являются
являются
поправками к измеренным значениям поперечных параллаксов q.
Они связаны с параллаксами условным уравнением, которое получается путём
образования разности между суммами уравнений для точек (3), (5) и дважды (2) и
для точек (4), (6) и дважды (1) т.е.
|
[(3)+(5)+2(2)]-[(4)+(6)+2(1)]=0. |
(98) |
Подставив в условное уравнение (98) уравнения
взаимного ориентирования из (97), будем иметь
|
|
(99) |
где
|
|
(100) |
Величина W — невязка, поскольку теоретически правая
часть уравнения (100) должна равняться нулю. Она может служить критерием
качества измерений поперечных параллаксов q на стандартных
точках, так как при условии, что они равноточны, на основании зависимости (110)
можно написать:
![]()
где mq – средняя квадратическая ошибка измерения
поперечных параллаксов q.
В результате допустимую невязку можно подсчитать по
формуле:
|
|
(101) |
Пусть поперечный параллакс q
измерен с ошибкой ![]() 0,01 мм. Тогда допуск равен 0,10 мм.
0,01 мм. Тогда допуск равен 0,10 мм.
Формулы для определения ЭВзО пары снимков
можно получить или путем решения системы (97) по способу наименьших квадратов
или из решения ее отдельных уравнений после введения поправок ![]() в параллаксы qi.
в параллаксы qi.
Во втором варианте поправки ![]() согласно (99) находятся через коррелатное уравнение из выражений:
согласно (99) находятся через коррелатное уравнение из выражений:
|
|
(102) |
После введения поправок ![]() система
система
(97) становится совместной, а значения неизвестных определяются по формулам:
Аналогично получаются формулы для второй
системы ЭВзО:
Согласно (103) и (104) средние квадратические ошибки
определения ЭВзО пары снимков предрасчитываются по формулам:
— для первой системы элементов:
— для второй:
|
|
(106) |
Они показывают, что при одной и той же ошибке mq измерения поперечных параллаксов точность определения
ЭВзО тем выше, чем меньше величина фокусного расстояния f и
больше параметры a и b стандартного расположения точек 1÷6.
В свою очередь параметр a
зависит от формата снимков, а длина базиса b и от величины
продольного перекрытия. При этом следует учесть, что точки 3, 4, 5 и 6 должны
выбираться не ближе 2 см от края снимка, поскольку метрические качества
изображения по его краям хуже, чем в центральной части.
Из сравнения формул (103) и (104) можно
заключить, что между первой и второй системами ЭВзО существует следующая связь:
|
|
(107) |
Но она справедлива только с точностью до величин
первого порядка малости.
Теоретические исследования [4 и проч.]
показали неопределённость решения задачи определения ЭВзО, когда на местности
точки 1, 3, 5 и 2, 4, 6 лежат на окружностях, а базис фотографирования
расположен на образующей цилиндра, для которого эти окружности являются
направляющими. Рассматриваемый случай возможен при съёмке горной местности и
карьеров. При такой ситуации задача решается, но произойдет некоторое снижение
точности определения координат точек местности.
4.6 Построение модели с
преобразованием связок проектирующих лучей
Иногда строят модель, когда расстояние f‘ от центра проекции до снимка не соответствует
фокусному расстоянию f камеры
АФА. В этом случае говорят, что связка проектирующих лучей преобразована. Для
того чтобы понять к чему это приводит, изменим фокусное расстояние АФА в k
раз при построении модели по паре горизонтальных снимков нормального случая
съемки (Рис. 42). Из рисунка видно, что условие взаимного ориентирования пары
снимков при этом не нарушится, то есть каждая пара соответственных лучей
преобразованных связок будет пересекаться.
Совокупность точек, в которых пересекаются
соответственные лучи преобразованных связок, называется преобразованной
(афинной) моделью. Однако заметим, что при преобразовании связок
проектирующих лучей точка A модели переместилась в точку A¢.
Причем, отрезок AA¢ — параллелен оси Z, так как он лежит
на линии пересечения двух отвесных плоскостей S1S1¢a1 и S2S2¢a2. Отсюда сразу же следует, что в плане никаких
изменений не происходит. Изменяется только координата Z,
то есть горизонтальный масштаб 1/MГ модели
не изменится. Станет иным вертикальный масштаб 1/MВ, и он не будет теперь равен горизонтальному.
Причем, из рисунка легко получить соотношение ![]() между
между
их знаменателями.
Отметим, что преобразованную модель местности
можно построить не только по горизонтальным, но и по плановым снимкам.
4.7 Внешнее ориентирование модели
Определив ЭВзО пары снимков (построив модель),
можно получить пространственные прямоугольные координаты ее точек в условной
фотограмметрической системе, причем в произвольном масштабе, так как расстояние
между центрами проекций принимается произвольно, На производстве планы
составляют в прямоугольной геодезической системе координат. Для перехода от
условной пространственной системы координат к геодезической необходимо
выполнить внешнее ориентирование модели.
На рис. 43 показаны геодезическая ![]() и фотограмметрическая SXYZ системы координат. Начало второй из них
и фотограмметрическая SXYZ системы координат. Начало второй из них
совмещено с точкой S модели,
геодезические координаты ![]() которой
которой
известны.
Введем вспомогательную систему координат
с началом в точке S. Ее оси направим параллельно осям системы
координат ![]() . Взаимное положение координатных систем S X Y Z и
. Взаимное положение координатных систем S X Y Z и ![]() определяется углами
определяется углами ![]() ,
, ![]() и
и ![]() .
.
![]() — продольный угол наклона модели,
— продольный угол наклона модели,
составленный осью ![]() с проекцией оси Z на
с проекцией оси Z на
плоскость ![]() .
.
![]() — поперечный угол наклона модели, заключённый
— поперечный угол наклона модели, заключённый
между осью SZ и её проекцией на плоскость![]() .
.
![]() — угол поворота модели вокруг оси SZ,
— угол поворота модели вокруг оси SZ,
находится в плоскости XSY.
Таким образом, для внешнего ориентирования модели
необходимо знать: t — знаменатель масштаба модели; геодезические
координаты ![]() точки S модели и три угла
точки S модели и три угла ![]() ,
, ![]() ,
, ![]() её поворота. Эти семь величин называются
её поворота. Эти семь величин называются
элементами внешнего ориентирования модели.
Если они известны, координаты точки местности
в геодезической системе координат определяются по формулам:
|
|
(108) |

где, Axhq —
матрица поворота, которая зависит от угловых элементов внешнего ориентирования
модели. Ее направляющие косинусы a, b, c вычисляются
по формулам, похожим на уравнения (18) при подстановке вместо углов ![]() ,
, ![]() и
и ![]() углов
углов
![]() ,
, ![]() и
и ![]() (с учетом изменения правой системы координат на левую).
(с учетом изменения правой системы координат на левую).
Элементы внешнего ориентирования, необходимые
для преобразования фотограмметрических координат точек модели, определяются,
как правило, по опорным точкам. Система уравнений (108), записанная для этих
точек, содержит семь неизвестных величин. Для их определения необходимо иметь
не менее трёх опорных точек, причём одна из них может быть высотной.
Задача решают графическим, графо-аналитическим
или аналитическим способами. Алгоритм аналитического решения уже дважды
обсуждался. Речь идет о методе итераций.
То есть, принимаются приближенные значения ЭВО
модели ![]() и путем подстановки их в уравнения (108)
и путем подстановки их в уравнения (108)
вычисляются геодезические координаты опознаков. Они не будут равны исходным
координатам. Разности lx, ly и lz между
вычисленными и исходными значениями координат принимаются за свободные члены
уравнений поправок ![]() , т.е:
, т.е:
![]()
![]()
![]()
Сами уравнения поправок имеют вид:
Коэффициенты перед поправками это частые
производные функций (108) по элементам внешнего ориентирования модели. И если
их взять, то для некоторых из них, например, получим:
Уравнения (109) решают под условием ![]() Критерием целесообразности выполнения последующего приближения
Критерием целесообразности выполнения последующего приближения
являются или заданные величины поправок к приближённым значениям ЭВО модели,
или заданные величины изменения этих поправок. Если полученные величины меньше
установленного допуска, то решение задачи прекращается. По данным последнего
приближения выполняется оценка точности определения ЭВО модели. Ошибка единицы
веса ![]() находится по формуле
находится по формуле
![]()
а средние квадратические ошибки определения ЭВО модели
– по формуле (59).
Далее, используя ЭВО модели можно для всех ее
точек вычислять геодезические координаты.
Если элементы ориентирования ![]() малы, а t незначительно отличается от единицы, то за
малы, а t незначительно отличается от единицы, то за
начальное приближение можно принять ![]() В
В
этом случае ![]() а остальные направляющие косинусы равны нулю.
а остальные направляющие косинусы равны нулю.
Тогда
где
![]()
![]()
![]()
Формулы (111) удобны для изучения точности
процесса внешнего ориентирования модели, поскольку в явном виде выражают связи
между фотограмметрическими и геодезическими координатами через элементы
внешнего ориентирования модели.
4.8 Двойная обратная пространственная
фотограмметрическая засечка
Обратим теперь внимание на то, что введение понятия о
взаимном ориентировании пары снимков, позволяет создать достаточно эффективную
технологию определения пространственных координат точек местности, а значит и
ее картографирования. Эффективность состоит, прежде всего, в том, что для
построения модели используется лишь та информация, которой получают снимки в
процессе фотографирования. А опознаки, нужны только в процессе ее внешнего
ориентирования. Отсюда минимальный объем дорогостоящих и трудоемких полевых
работ. Эта технология была названа двойной обратной пространственной
фотограмметрической засечкой. Она включает следующие этапы
1.
Внутреннее ориентирование
снимков пары (построение связок проектирующих лучей).
2.
Взаимное ориентирование
снимков (построение модели произвольного масштаба).
3.
Внешнее ориентирование
модели.
4.
Определение координат
отдельных точек местности или ее картографирование.
Именно эта технология
и нашла наибольшее применение на производстве.
4.9 Особенности теории наземной
фотограмметрии
В принципе для теории фотограмметрии
безразлично как снимок расположен в пространстве. Но незначительные особенности
при картографировании по наземным снимкам есть, и их следует рассмотреть.
Во-первых, несколько иначе вводится система координат на
наземном снимке (Рис.44), но в основном путем использования координатных меток. Как следует из рисунка,
оси на снимке обозначены буквами x и z. Это означает, что
его элементами внутреннего ориентирования являются величины f,
xо и zо.
За начало фотограмметрической системы координат чаще
всего принимают центр проекции S, ось Z устанавливают отвесно, а оси X и Y –
горизонтально. Угловыми элементами внешнего ориентирования снимка являются: j — угол между осью Y и проекцией главного луча на плоскость SXY
(на рисунке он отрицательный); w
— угол наклона главного луча;
k — разворот снимка в своей плоскости, например,
угол между главной горизонталью и осью x (на
рис. 44 не показан).
 |
При определении пространственных
координат точки на снимке формулы (15) примут вид:
|
|
(112) |

Направляющие косинусы матрицы A поворота
в выше приведенной формуле получаются, как произведение AfAwAk и могут быть вычислены по формулам:
|
a1=cosfcosk+sinfsinwsink, a2 =-sinfcosw, a3=-cosfsink+sinfsinwcock, b1=sinfcosk-cosfsinwsink, b2=cosjcosw, b3=-sinfsink-cosfsinwcosk, c1=coswsink, |
(113) |
При условии учета зависимостей (112) и (113),
соотношения между координатами точек местности и снимка те же, что и для
аэрофотоснимка, например, уравнения (25).
Если оси X и
Z пространственной фотограмметрической системы координат
параллельны соответствующим осям x и z снимка и координаты
главной точки равны нулю, то, используя их, можно получить:
|
|
(114) |
Значение координаты Y часто
называют отстоянием. Из выше приведенной формулы следует, что отношение
отстояния к фокусному расстоянию снимка является масштабом изображения.
Особенностью наземной фототопографии является и то,
что при фотографировании объектов элементы внешнего ориентирования снимков
устанавливаются с достаточно высокой точностью. Поэтому довольно часто
координаты точек местности по паре снимков определяют путем решения прямой
пространственной фотограмметрической засечки. При этом за начало
фотограмметрической системы координат принимают центр проекции левого снимка
пары, ось Y направляют
вдоль проекции главного луча на горизонтальную плоскость, ось Z –
отвесно, (система правая).
Угловые элементы внешнего ориентирования f, w и k,
каждого из снимков стереопары являются и элементами самой пары. Но f, как правило, это угол в горизонтальной
плоскости между проекцией на нее главного луча и перпендикуляром к базису
фотографирования. Понятно, что при таком подходе линейные элементы внешнего
ориентирования левого снимка равны нулю, а правого — это проекции базиса
фотографирования на оси координат.
Отметим, что формулы прямой пространственной
фотограмметрической засечки, установленные для пары аэрофотоснимков справедливы
(с учетом выше приведенных замечаний) и для пары наземных снимков. Но после
получения координат точек местности необходимо выполнять процесс внешнего
ориентирования. В этом случае он проще, так как поворот следует выполнять
только вокруг оси Z (снимок в процессе фотографирования
устанавливается отвесно). Элементами внешнего ориентирования считают:
геодезические координаты начала фотограмметрической системы координат Xs, Ys и
Zs (левого
центра проекции); дирекционный угол a
главного луча (или базиса
фотографирования ab); поправку DZr за кривизну Земли и вертикальную рефракцию.
Формулы преобразования в этом случае имеют вид:
|
XГ=Xs+Ycosa—Xsina, YГ=Ys+Ysina+Xcosa, ZГ=Zs+Z+DZr |
(115) |
4.9.1 Основные виды наземной стереофотограмметрической съемки
Очень часто формулы для определения координат
точек местности по паре наземных снимков стараются упростить. С этой позиции в
зависимости от положения снимков в момент фотографирования различают пять
основных случаев (видов) съемки: нормальный, равноотклоненный (скошенный),
конвергентный, равнонаклонный и общий (произвольный). В наземной фототопографии
чаще всего применяют первые два. При решении специальных задач популярен и
конвергентный случай, реже равнонаклонный.
При конвергентном случае съемки главные лучи снимков
горизонтальны, но не параллельны друг другу, а оси x на
снимках горизонтальны (рис. 45). То есть fл ¹ fп, wл= wп= kл= kп=0.
Угол g между главными лучами левого и правого
снимков называют углом конвергенции, если лучи сходятся, и углом дивергенции,
если они расходятся
При таком выборе системы фотограмметрических
координат, как на рис. 45, угловые элементы внешнего ориентирования левого
снимка равны нулю, и, при условии равенства нулю координат главной точки:
|
X¢1=x1, Y¢1=f и |
(116) |
Правый снимок развернут на угол g, поэтому в соответствии с формулами (113): a1=cosg, a2=-sing, b1=sing, b2=cosg, c3=1. Остальные направляющие косинусы равны нулю.
Таким образом, согласно формуле (112) получим:
|
X¢2=x2cosg-fsing, |
(117) |
В соответствии с рис. 46 базисные составляющие равны:
|
Bx=Bcocfл, BY= -Bsinfп |
(118) |
С учетом выше приведенных уравнений (116-118) и в соответствии с
пропорцией (66) выражение для скаляра будет иметь вид:
|
|
(119) |
Зная скаляр, по формулам (68) можно вычислить фотограмметрические координаты
точек местности.
В равноотклоненном случае съемки углы скоса главных лучей
не равны нулю, но взаимно параллельны, то есть: fл =fп=f ¹
0, wл=wп= kл=kп=0.
Подставим угол g=0, в соотношение (119), и с учетом формулы
(68) получим:
Где p – продольный параллакс, равный разности абсцисс
соответственных точек левого и правого снимков.
Если случай съемки нормальный все угловые элементы
снимков равны нулю, поэтому в соответствии с уравнениями (120) будем иметь:
5 Стереоскопическое зрение, измерение
снимков и модели.
5.1 ОСНОВЫ СТЕРЕОСКОПИЧЕСКОГО ЗРЕНИЯ.
Как показывают предыдущие разделы, для
достижения основной цели — определения координат точек местности по
фотоснимкам, нужно их измерять. Из данных природой человеку органов чувств,
особое значение для этого имеет зрение. Обеспечивается оно системой глаз –
мозг.
Глаз человека это сложное и совершенное
оптическое устройство (рис. 46). Он имеет форму, приближающуюся к шару с
радиусом около 12 мм; его поверхность состоит из трёх оболочек. Наружная
защитная оболочка глаза (склера) 1 в передней своей части переходит
в тонкую и прозрачную роговицу 10. Под склерой находится сосудистая
оболочка 2, переходящая в непрозрачную радужную оболочку 9.
Она имеет красящие вещества (пигменты), определяющие цвет глаз. Спереди
радужной оболочки находится зрачок 11 (отверстие с
изменяющимся в пределах 2-8 мм диаметром). Он играет роль диафрагмы и
регулирует количество поступающих в глаз световых лучей. Третья (внутренняя)
оболочка 3 называется сетчаткой и состоит из фоторецепторов
— большого числа светочувствительных элементов (колбочек и палочек),
передающих своё раздражение через нервную систему в мозг наблюдателя. Палочки
чувствительны к слабому сумеречному освещению, колбочки – к дневному, яркому
свету и обладают цветочувствительностью. Место вхождения зрительного нерва в
сетчатку носит название слепого пятна 7, так как оно не имеет
колбочек и палочек, а, следовательно, и не реагирует на световое раздражение. В
середине сетчатки напротив зрачка находится жёлтое пятно 4,
являющееся наиболее чувствительной частью сетчатки. Центральное углубление
жёлтого пятна 5 состоит из одних колбочек. Диаметр впадины жёлтого пятна
составляет примерно 0,4 мм, диаметр колбочки приблизительно 2 мкм.
Спереди глаза за зрачком расположен хрусталик 12,
представляющий собой двояковыпуклую линзу. Он строит на сетчатке
действительное, уменьшенное и обратное изображение наблюдаемого объекта. Таким
образом, его назначение аналогично объективу фотоаппарата. Сетчатка играет
такую же роль, что и матрмица ПЗС.
Резкость изображения на сетчатке достигается
посредством аккомодации хрусталика (изменение его кривизны, происходящее
рефлекторно). Чем ближе находится рассматриваемый предмет, тем большей должна
быть кривизна поверхности хрусталика. Осуществляют аккомодацию глазные мышцы 8.
Они не напряжены, если рассматриваемый объект находится в бесконечности (более
10 м). При этом фокусное расстояние хрусталика равно приблизительно 16 мм. Но
при наблюдении на таком расстоянии упускаются мелкие детали. Оптимально, когда
и детали видны и мышцы не очень напряжены. Такие условия для нормального глаза
выполняются на расстоянии наилучшего зрения (около 25 см).
Пространство между роговицей и хрусталиком
наполнено «водянистой влагой», а между хрусталиком и сетчаткой – «стекловидной
влагой» 13, Их коэффициенты преломления примерно равны между собой.
Луч, проходящий через центр впадины жёлтого
пятна и заднюю узловую точку оптической системы глаза, называется зрительной
осью глаза, а прямая, проходящая через центры кривизны поверхностей роговицы и
хрусталика – его оптической осью. Угол между этими осями равен 5°.
Поле зрения неподвижного глаза составляет 150°
по горизонтали и 120° по вертикали. В его разных частях изображение
воспринимается с различной чёткостью. Лучше видны те предметы, которые попадают
на центральную ямку сетчатки.
Угол, под которым виден диаметр центральной ямки
жёлтого пятна из узловой точки хрусталика, называется углом отчётливого
зрения. Он равен 1,5°.
Раздражение светом палочек и колбочек
вызывает зрительное ощущение, если длина электромагнитных волн находится в
пределах 360 – 760 нм. Максимальная чувствительность к желтой части спектра,
примерно 555 нм.
Существует статистическая и динамическая
теории зрения. В соответствии с динамической теорией большую роль при
рассматривании предметов играют движения глаз. Они бывают произвольными
(зависят от воли человека) и непроизвольными (физиологические нистагмы). Непроизвольные
движения включают:
·
Дрожь – колебание глаз
со скоростью 20¢ в секунду с
амплитудой 10-20²;
·
Колебания – быстрые
вращения со скоростью примерно 6000¢ в секунду с амплитудой 1 — 25¢. Происходят не регулярно с интервалами 0.05 –
5 сек.;
·
Медленные движения со
скоростью 1¢ в секунду с
амплитудой до 5¢.
Непроизвольными движениями глаз сканирует изображение, построенное
хрусталиком.
Различают два вида зрения: монокулярное и
бинокулярное.
Зрение одним глазом называется монокулярным
зрением. Наблюдатель обычно подсознательно поворачивает глаз так, чтобы
изображение объекта оказалось на углублении
жёлтого пятна. Пересечение зрительной оси глаза с рассматриваемым объектом
называется точкой фиксации F монокулярного зрения.
Для оптических наблюдений и измерений
важную роль играет острота зрения, т.е. способность невооружённого глаза
воспринимать две расположенные рядом точки или линии как разные элементы.
Минимальный угол, под которым наблюдатель ещё видит раздельно две светящиеся
точки, называется остротой монокулярного зрения первого рода. Для
нормального глаза этот угол равен примерно 45». Но он зависит от многих
факторов (дифракция, аберрации, освещение, тип тест объекта, длина волны и
т.д.) и колеблется в пределах 0.5² — 10¢.
Остротой монокулярного зрения второго рода называется минимальный угол, под которым
человеческий глаз видит раздельно две параллельные линии. Она выше, чем острота
монокулярного зрения первого рода и примерно равна 20». Это объясняется тем,
что изображение линий воспринимается не одной, а целой группой колбочек.
Существует понятие стереоскопического
(пространственного) восприятия объектов. Оно может быть монокулярным и
бинокулярным.
При монокулярном зрении об удалённости
наблюдаемых предметов можно судить только по косвенным признакам (относительный
размер предметов, свет и тени, перекрытия, перспектива, визуальные контрасты,
параллакс движений, детальность изображений и т.д.). Указанные признаки оценки
пространственной глубины при монокулярном зрении дают приближённое, а иногда
неверное представление о расстояниях.
Стереоскопическое зрение это
пространственное восприятие, возникающее при рассматривании объекта двумя
глазами. Такое наблюдение называется бинокулярным зрением. В этом случае
наблюдатель устанавливает глаза таким образом, чтобы изображение объекта
оказалось в центральных ямках f1 и f2 сетчаток обоих глаз (рис. 47). Поэтому зрительные оси глаз
пересекаются в том месте объекта, которое наблюдатель
желает отчётливо рассмотреть. Точка пересечения зрительных осей называется точкой
фиксации F бинокулярного зрения.
Расстояние b между центрами хрусталиков левого и правого
глаз это глазной базис. Он у людей разный и колеблется в пределах от 55 до
72 мм.
Угол ![]() F, под которым пересекаются зрительные оси,
F, под которым пересекаются зрительные оси,
называется углом конвергенции (сходимости).
Величина угла конвергенции зависит от
отстояния L точки F. Эта зависимость выражается приближённым
уравнением:
|
|
(122) |
Размеры жёлтого пятна позволяют увидеть при
данном положении глаз и другие точки (рис. 47). Изображения а1
и а2 точки А объекта, полученные на сетчатках глаз,
называются соответственными точками, а лучи О1 а1
и О2 а2 – соответственными лучами.
Угол ![]() ., под которым пересекаются
., под которым пересекаются
соответственные лучи, называется параллактическим углом.
Неравенство углов ![]() F и gA вызывает неравенство дуг
F и gA вызывает неравенство дуг ![]() и
и ![]() ,
,
полученных в пределах жёлтого пятна левого и правого глаз. Алгебраическая их
разность называется физиологическим параллаксом и обозначается р,
т.е.:
|
|
(123) |
Дуга считается положительной, если
она находится слева от центральной ямки. Наличие физиологического параллакса
является причиной пространственного восприятия при стереоскопическом зрении.
Абсолютная величина угла конвергенции
ощущается при этом с невысокой точностью, поэтому и отстояние наблюдаемой точки
определяется приближённо. В то же время изменения величин параллактических
углов относительно угла конвергенции воспринимаются с высокой точностью. Это
обстоятельство позволяет определить изменения отстояний других точек
относительно точки фиксации также с высокой точностью. Установлено, что
разность отстояний воспринимается человеком, когда dg=ï![]() F—
F—![]() ï£70¢. Если это
ï£70¢. Если это
условие не выполняется, то он меняет точку фиксации.
Для определения соотношения между изменениями
расстояния и угла конвергенции в соответствии с (122) запишем:
|
|
(124) |
Существует понятие гороптер. Это
геометрическое место точек в пространстве, которые, при заданном положении
точки фиксации, дают изображение на симметричных точках фиксации. Для всех
остальных точек, в указанных выше пределах и возникает физиологический
параллакс.
Наименьшее значение ![]() (или
(или
физиологического параллакса р), при котором ещё ощущается разность
расстояний DL,
называют остротой или разрешающей способностью стереоскопического зрения.
Острота стереоскопического зрения первого рода – это минимальная разность параллактических
углов двух точек, при которой ещё воспринимается
разность
отстояний. Она примерно равна 30».
Острота стереоскопического зрения
второго рода – это минимальная разность
параллактических углов для двух вертикальных прямых, при которой ещё замечается
разность их отстояний. Она равна 10». Эти характеристики меняются в
зависимости от индивидуальных особенностей наблюдателя, а так же от условий
наблюдения – освещённости, контрастности объектов, их формы и т.п.
Используя понятие остроты стереоскопического зрения,
по формуле (122) можно определить радиус R невооруженного бинокулярного зрения. Так, приняв ![]() F =30² и b=65 мм, получим: R=(65
F =30² и b=65 мм, получим: R=(65
мм×200 000²)/30²=430 м. Если для наблюдения объектов использовать
бинокли или стереотрубы, у которых искусственно увеличен глазной базис
(обозначим его буквой B), и использованы оптические системы увеличения,
возрастает и радиус стереоскопического зрения в w=(BV)/b раз,
Величину w называют коэффициентом пластичности прибора.
5.2 СТЕРЕОСКОПИЧЕСКИЙ ЭФФЕКТ, простейшие стереоприборы.
Пространственное восприятие можно получить не
только при непосредственном рассматривании объекта в натуре, но и при
рассматривании стереопары снимков этого объекта.
Представим себе, что с точек S1 и S2 сделаны два снимка Р1 и Р2
рассматриваемого объекта (точки F и
A, рис. 47) Поставим эти снимки перед глазами
наблюдателя так, чтобы проектирующие лучи проходили через изображения
соответственных точек на снимках (точки а¢1,¢2, и f¢1,
f¢2,). При
рассматривании каждого снимка (левого Р1 – левым глазом, а
правого Р2 – правым) изображения точек объекта получаются в
тех же точках сетчаток, что и при рассматривании самого объекта, и вследствие
разностей физиологических параллаксов возникает впечатление объёмного изображения.
Пространственное восприятие объекта при
бинокулярном рассматривании пары снимков, полученных с разных точек
пространства, называется стереоскопическим эффектом, а воспринимаемая
при этом мнимая картина – стереоскопической моделью.
Для получения стереоэффекта, кроме названных
выше условий необходимо, чтобы:
1.
Разность масштабов снимков
стереопары не превышала 16 %.
2.
Каждым глазом наблюдался
только один из снимков.
3.
Угол, под которым
пересекаются соответственные лучи, не превышал 16°.
4.
Положение снимков было
согласовано с глазным базисом. В первом приближении это осуществляется
расположением снимков на линии, параллельной глазному базису.
При рассматривании пары снимков можно получить
прямой, обратный или нулевой стереоэффекты (рис. 48). Стереоскопический эффект
получается прямым (естественное восприятие пространства), если снимки
расположить перекрытием внутрь; обратным (обратное восприятие выпуклых и
вогнутых форм), если их расположить перекрытием в разные
стороны.
![]()
Если снимки повернуть на 90° в разные
стороны, то возникает нулевой стереоэффект, при котором рассматриваемый
объект воспринимается плоским.
Для обеспечения второго условия получения
стереоэффекта используют: анаглифический, поляроидный, миганий, растровый,
оптический и другие способы.
В способе анаглифов и левое изображение
и правое проецируют на один экран через светофильтры красный и зеленый (синий).
Полученная картина рассматривается через анаглифические (красно-зеленые) очки.
В результате каждый глаз видит только одно изображение, а при их слиянии
возникает стереоэффект в серо-белых тонах.
В способе поляроидов используют не
цветные, а поляроидные светофильтры с углом поляризации между ними 90°. Через
них рассматривают проецируемые на экран поляризованные с таким же углом
изображения. В отличие от анаглифического способа, поляроидный может
использоваться для наблюдения цветных снимков, поэтому используется в
кинематографии.
В способе миганий
снимки проектируются на экран поочерёдно с помощью, например, вращающихся перед
объективами бленд. Такие же бленды установлены перед глазами наблюдателя.
Частота вращения обеих пар бленд синхронизирована и составляет не менее 10
миганий в секунду. Таким образом, наблюдатель непрерывно видит левым глазом
только левое изображение, а правым – только правое. Способ используется для
получения объемной картины и на экране монитора.
При растровом способе два снимка проектируются
на экран, составленный из линз цилиндрической формы. Оптические лучи, несущие
изображения разных снимков, отражаясь противоположными гранями линз экрана,
попадают в разные глаза наблюдателя.
Оптический способ основан на разделении зрения с помощью оптических
систем. Этот способ имеет широкое применение в фотограмметрии. Простейшими оптическими приборами, позволяющими
получить пространственное изображение сфотографированного объекта, являются
стереоскопы.
Имеются линзовые стереоскопы, которые
предназначены для рассматривания малоформатных снимков (6x6 см).
Для работы с аэрофотоснимками, как в полевых, так и в камеральных условиях, используют зеркальные
стереоскопы с бинокулярной насадкой или линзово-зеркальные стереоскопы.
Линзово-зеркальный стереоскоп ЛЗ (Рис. 49)
имеет две пары зеркал 1, 2 и 1¢, 2¢, установленных под углом 45° к плоскости горизонтально расположенных снимков; и
две линзы 3 и 3¢. Пунктиром на рисунке показан ход центральных
лучей, O1 и O2 – узловые точки
глаз (центры хрусталиков). Расстояния от центров линз 3 и 3¢ до снимков по ходу центральных лучей называются
главными расстояниями стереоскопа, а отрезок между центрами больших зеркал 2 и
2¢ — базисом стереоскопа d.
Если считать, что расстояние наилучшего зрения равно 250 мм, то увеличение
стереоскопа V=250/d. Для получения стереокартины снимки следует
устанавливать так, чтобы расстояние между соответственными точками примерно равнялось
длине базиса стереоскопа, а отрезки между парой соответственных точек
располагались на одной прямой параллельной его направлению. В зависимости от
расположения снимков стереоэффект будет прямой, обратный или нулевой.
Стереоскопическое измерение снимков можно
выполнять способами действительной и мнимой марки. Первый из них — уже
практически история. Он применялся при монокулярном измерении снимков, а также
при измерении модели, построенной по паре снимков с помощью поляроидов и
анаглифов в некоторых проекционных приборах (мультиплексе, двойном проекторе и
т.д.).
Способ мнимой марки предложен в 1899 г. Пульфрихом и используется
для измерения координат точек пары снимков и модели. Суть его состоит в
следующем. В плоскости изображений (снимков) располагают две действительные марки m1 и m2 (на рис. 50 показаны крестиками). При их
рассматривании под стереоскопом в одну объемную картину сливаются не только
изображения снимков, но и марок, то есть наблюдатель видит одну
пространственную мнимую марку M. Но это произойдет только в случае, когда каждая из марок m1
и m2 будет расположена вблизи соответственных точек
(например, а1.и а2). Причем,
небольшое взаимное перемещение действительных марок (или снимков относительно
марок) вдоль оси x вызовет
перемещение мнимой марки по глубине. В результате она будет казаться либо
«висящей в воздухе», либо «утопленной в землю». В последнем случае мнимая марка
раздваивается, что дает возможность оценить поперечный параллакс. Когда
действительные марки точно совмещены с соответственными точками (например, а1.и
а2), создается впечатление касания мнимой марки поверхности
стереомодели в точке А. Для того, чтобы этого добиться, стереоприбор должен
обеспечивать совместное движение снимков (действительных марок) вдоль осей x и y, а также
независимое движение одного из снимков (одной из марок), вдоль этих же осей.
При наличии соответствующих шкал на таком приборе можно измерять параллаксы.
Наиболее простым прибором для измерения
только продольных параллаксов p точек,
является параллаксометр. Его принципиальная схема представлена на Рис. 51. На
общем металлическом стержне 1 расположены две стеклянные пластинки с марками m1
и m2 и фиксатор 2. Марка m2 при
вращении барабанчика 3 перемещается вдоль стержня. Величину
перемещения можно отсчитать: целые миллиметра — по шкале p на
стержне, десятые и сотые доли — по барабанчику 3. Фиксатор 2 служит для
накалывания наблюдаемых точек на основу (план).
Прибором для измерения фотокоординат, продольного и
поперечного параллаксов является стереокомпаратор (Рис. 52). Их конструкции
различны (например, СК-2, или стереокомпаратор 1818 фирмы «Цейсс»), но
принципиальные схемы одинаковы. Основными частями любого стереокомпаратора
являются:
—
Станина 1 с двумя взаимно
перпендикулярными направляющими X и Y (при измерении наземных
снимков – Z);
—
Основная каретка 2,
перемещается вдоль направляющей X при вращении штурвала X. Величину
перемещения можно определить по шкале X;
—
Бинокулярная система 3 с
марками m1 и m2,
перемещается вдоль направляющей Y при вращении штурвала Y. Отсчет
можно взять по шкале Y;
—
Каретка продольных
параллаксов 4 с винтом P, при вращении которого она перемещается вдоль
оси X и который имеет шкалу для определения величины
перемещения;
—
Каретка поперечных
параллаксов 5. При вращении винта Q она перемещается вдоль оси Y, и
по его шкале можно оценить величину перемещения;
—
Снимкодержатели 6 и 7. Их
можно вращать в своей плоскости винтами k1 и k2
У стереокомпаратора есть осветительная система, и
регулировки, обеспечивающие настройку бинокулярной системы по глазному базису,
по глазу и по предмету. Формы измерительных марок различны, но при увеличении
они достаточно большие, и на рис. 53 стрелочками показано, какую их часть
целесообразно использовать для точного наведения на измеряемую точку.
Отметим, что марки бывают светящиеся (в основном круглые) и
несветящиеся. Несветящиеся марки имеют чёрный цвет, и на тёмных участках
снимков измерения затрудняются. В большинстве приборов устанавливаются
светящиеся марки. Цвет марки задаётся с помощью сменных фильтров – зелёный,
красный, белый и т.д.
Процесс обработки снимков на стереокомпараторе
включает: установку снимков в снимкодержателях, их ориентирование, определение
мест нулей шкал прибора и непосредственно измерения. Следует помнить, что
негативы устанавливаются эмульсией вниз, а диапозитивы – эмульсией вверх.
Снимок считается сориентированным, если его
оси координат параллельны соответствующим направляющим стереокомпаратора (Рис.
54 правый снимок). В зависимости от способа введения системы координат на снимках,
ориентирование выполняют по координатным меткам (основной вариант), тогда этот
процесс независим для левого и правого снимков или по начальным направлениям. В первом случае
действуют в такой последовательности:
1.
Штурвалами X и Y,
измерительную марку совмещают с координатной меткой 1;
2.
Штурвалом X марку
перемещают по направлению к координатной метке 2. Если она точно проходит через
метку, значит снимок (правый на рис. 54) сориентирован.
3.
Если марка оказалась выше
или ниже, ее устанавливают на координатную метку 2, при этом половину
перемещения осуществляют винтом k, а
половину штурвалом Y.
4.
Операцию ориентирования
выполняют методом последовательных приближений.
При ориентировании правого снимка диапазон
перемещения каретки по оси X может оказаться недостаточным, в таком
случае действуют и винтом продольных параллаксов P. Допустимо также
использовать винт поперечных параллаксов вместо штурвала Y. И, наконец, заметим, что
иногда снимок ориентируют и по вертикальным меткам, если, например, качество их
изображений выше, чем качество изображений меток 1 и 2.
После ориентирования приступают к процессу измерения
снимков. Он состоит в том, что штурвалами X и Y совмещают
измерительную марку с выбранной на левом снимке точкой а1, а
винтами P и Q, правую марку, совмещают с соответственной ей
точкой а2. Указанные операции являются монокулярными и в
принципе, после их выполнения, можно брать отсчеты по шкалам стереокомпаратора. Но если рассматривать
снимки двумя глазами возникнет стереоэффект, будет наблюдаться одна пространственная марка и точность наведения можно
повысить, для чего:
1.
Вращением винта P
пространственную марку «утапливают» и она раздваивается. В результате в
плоскости изображения наблюдается одна из картин (рис 55). На картинках a и
b марки расположены на разной высоте (говорят, что наблюдается поперечный
параллакс). Выполнять точные пространственные измерения в этом случае трудно и
параллакс стараются устранить.
2.
Вращением винта поперечных параллаксов
устраняют поперечный параллакс (картинка c).
3.
Винтом продольных
параллаксов приподнимают марку над точкой, а затем, вращая его в
противоположном направлении, совмещают марку с точкой (картинка d),
после чего и берут отсчеты по шкалам стереокомпаратора.
5. 3
Особенности измерения цифровых снимков
5. 3.1 Средства измерений
Измерение цифровых снимков выполняется на
экране монитора. Оно может быть как монокулярным, если отображается один снимок
(растр) и стереоскопическим, когда на экране присутствуют растры, составляющие
стереопару, а технология требует именно такого варианта измерений.
В качестве измерительной марки используется
курсор (или два курсора). Его (их) форма, размер и цвет зависят от того, какой
технологический процесс выполняется, а также могут устанавливаться и
пользователем. Перемещение курсора (курсоров) осуществляется мышкой,
соответствующими кнопками клавиатуры, а на фотограмметрической станции ЦФС,
кроме того, ножным и ручными штурвалами. Методы стереонаблюдения: оптический,
миганий и анаглифический.
Первый используется на ЦФС, для чего перед экраном
дисплея устанавливается стереоскоп. В методе миганий используются затворные
(жидкокристаллические) очки, в которых попеременно открывается изображение, то
для левого, то для правого глаза, Синхронно с работой очков чередуются
изображения снимков на экране монитора. При этом возможен интерлейсный режим
при котором кадр делится на два полукадра, первый из которых содержится в
четных строчках, а второй – в нечетных (при этом происходит снижение разрешения
и возникают
некоторые неудобства при работе с меню). Возможно и покадровое стерео (режим page—flipping).
Оно обеспечивает более качественный стереоэффект, в связи с использованием
полных кадров. Для того, чтобы оператор не уставал, нужна высокая частота
вертикальной развертки. Как отмечалось выше, она должна быть не менее 120 Гц.
При анаглифическом методе на экране
отображаются в разных цветах два наложенных друг на друга растра (например,
красный и синий), а оператор должен использовать анаглифические очки. Как
правило, есть возможность варьировать цветами растров и подобрать наилучший
вариант (исходя из цветов стекол очков и пристрастий оператора).
Обычно в программных продуктах реализовано
несколько вариантов стереонаблюдений, и можно переходить от одного к другому,
но, по отзывам производственников, анаглифический метод измерений наименее
точен, и его следует использовать как вспомогательный вариант. Кроме того,
всеми разработчиками предусматривается переключение от прямого стереоэффекта к
обратному, что очень полезно при работе со снимками залесенных и застроенных
территорий. Возможна и коррекция самих растровых изображений (изменение
плотности, контрастности и т.д.).
Большим достоинство измерения цифровых снимков
является то, что после позиционирования одного из курсоров, второй можно
навести на соответственную точку автоматически, используя механизм корреляции.
Он же позволяет автоматически сгущать число соответственных точек или набирать
их в виде сетки квадратов, что важно для взаимного ориентирования снимков и
построения цифровой модели рельефа. Но результат работы коррелятора нужно все
время контролировать, особенно на однотонных участках снимков.
5.3.2 Принципы измерений (Михайлов)
Цифровое изображение хранится в памяти
компьютера, в общем случае, в виде прямоугольной матрицы, элементы которой несут
информацию об оптических плотностях или цвете элементарных участков
изображения, а номера i строки и j столбца элемента определяют его положение в
матрице. Нумерация строк и столбцов матрицы цифрового изображения начинается с
нуля.
Координаты центров пикселов в левой прямоугольной
системе координат цифрового изображения оC xC УC .(рис. 56), началом которой
является левый верхний угол цифрового изображения, определяются в, так
называемых, пиксельных координатах (единицей измерения в этом случае является
пиксел) по формулам:
|
xp =j + 0.5, yp =i + |
(125) |
Для измерения координат точек цифрового изображения
его визуализируют на экране дисплея. Если пиксел изображения на экране дисплея
соответствует пикселу исходного цифрового изображения, то с помощью “мыши” или
клавиатуры компьютера можно навести измерительную марку, формируемую в виде
цифрового изображения на экране дисплея, на точку изображения с точностью до
одного пиксела.
Для получения подпиксельной (субпиксельной) точности
можно увеличить матрицу изображения на экране монитора относительно исходного
цифрового изображения. В этом случае каждый пиксел исходного изображения будет
изображаться матрицей n×n пикселов, численное значение всех элементов a’ij
которой будут равны численному значению элемента матрицы исходного изображения.
Пиксельные координаты точек увеличенного изображения
можно измерить с точностью до 1/n пиксела исходного изображения (рис.57).
Рис. 57
Пиксельные координаты (в пикселах исходного изображения) элемента a’ij
увеличенного изображения определяют по формулам:
|
xp =j +(j΄ + 0.5)/n, yp |
(126) |
Причем i, j — номера строки и столбца элемента матрицы исходного
изображения, в котором находится элемент a’ij увеличенного изображения, а i΄,j΄
— номера строки и столбца элемента a`ij подматрицы n×n; n – коэффициент
увеличения изображения.
Например, для элемента a’33 (рис.57) пиксельные
координаты:
xp = 1 +(3 + 0.5)/5 =1.7 , yp = 1
+(3 + 0.5)/5 =1.7
Значения координат центров пикселов цифрового изображения в метрической
системе можно определить по значениям их пиксельных координат, используя
соотношение:
|
xc = Δ·xp и yc = Δ·yp, |
(127) |
если известны физические размеры Δ стороны пиксела изображения
(предполагается, что пиксел имеет форму квадрата). Например, координаты центра
пиксела, соответствующего элементу a’33 (рис. 56) при величине Δ=20 мкм будут
равны хc = 34 мкм и yc
= 34 мкм.
В некоторых цифровых системах начало системы координат
цифрового изображения оC хC уC выбирают в центре пиксела, расположенного в
верхнем левом углу цифрового изображения. В этом случае значения пиксельных
координат вычисляют по формулам:
при измерениях с точностью до пиксела и по формулам:
|
xp =j – 0.5+(j΄ + 0.5)/n, yp |
(129) |
при измерениях с субпиксельной точностью.
Метод измерения цифрового изображения с субпиксельной
точностью требует его увеличения на экране дисплея компьютера. Однако, даже при
увеличении только в два раза, исходный аналоговый снимок может оказаться
увеличенным на экране дисплея в 40 раз. Это приводит к значительному ухудшению
изобразительных свойств наблюдаемого изображения и, как следствие, к снижению
точности наведения измерительной марки на измеряемые объекты на изображении.
Для его реализации без увеличения исходного
изображения, разработан метод, в котором цифровое изображение снимка может
смещаться относительно неподвижной измерительной марки с шагом в n – раз
меньшим размера пиксела.
![]()
Принцип такого метода измерения
координат точек иллюстрируется на рис. 58 и 59.
На рис.58 представлен фрагмент исходного цифрового
изображения с измерительной маркой и точкой m, координаты которой необходимо
измерить. Из рисунка следует, что центр изображения марки не совпадает с
изображением точки m, причем разности значений их пиксельных координат
составляют величины Dxp
и Dyp. Для совмещения центра изображения измерительной марки
с точкой m можно создать фрагмент цифрового изображения снимка, в котором
координаты начала системы координат oc΄
xc΄
yc будут иметь значения ![]() , а
, а ![]() .
.
Создается такой фрагмент следующим образом. По
координатам центра каждого пиксела фрагмента изображения x΄pi,
y΄pi определяют значения координат его проекции xpi,
ypi в системе координат охcуc
исходного изображения. Для этого используют формулы: xpi= x΄pi+ Δxpi, ypi= y΄pi+ Δypi. Затем по значениям координат xpi, ypi находят ближайшие к изображению точки i,
соответствующей центру пиксела создаваемого фрагмента цифрового изображения,
четыре пиксела исходного цифрового изображения, например, M, K, L, N (рис. 60).
Далее методом билинейного интерполирования определяют
значения оптической плотности i-го пиксела создаваемого фрагмента изображения.
При этом:
|
Di = D1 |
(130) |
причем
D1 = DK + (DM – DK)DYP,
D2 = DL + (DN – DL)DYP,
Таким же образом формируются все
элементы создаваемого фрагмента цифрового изображения.
На экране дисплея, на визуализированном фрагменте созданного цифрового
изображения центр измерительной марки будет совмещен с изображением точки m. Ее
пиксельные координаты в системе координат исходного изображения определяются по
формулам 129.
Необходимо отметить, что создание фрагмента цифрового
изображения требует значительных вычислительных процедур. Поэтому для
достижения эффекта перемещения изображения на экране дисплея относительно марки
в “реальном масштабе” времени фрагмент изображения не должен иметь большие
размеры.
В случае если для измерений используются цветные
цифровые изображения при формировании элементов создаваемого изображения
методом билинейного трансформирования по формулам 130. определяются
интенсивности красного (R), зеленого (G) и синего (В) компонентов цветного
изображения.
5.3.3 Механизм корреляции изображений
Одной из важнейших частей программ по цифровой
обработке является корреляционный алгоритм, позволяющий автоматически
определять соответственные точки снимков с высокой точностью, многократно
увеличивая производительность труда оператора при проведении ориентирования в
процессе измерений и построении ЦМР.
Отметим, что попытки автоматизировать процесс поиска
соответственных точек (заменить при стереоизмерениях человека машиной)
предпринимались еще в первой трети 20 века [12]. После второй мировой войны
появилась реальная возможность решения этой задачи, и вскоре были созданы
первые автоматические стереосистемы для измерения параллаксов электронными
методами. При электронном определении параллаксов имеют место следующие два
основных процесса: преобразование фотографических плотностей в электрические
сигналы (то есть сканирование) и сравнение этих сигналов в корреляторе.
Основная задача коррелятора оценить степень подобия между сигналами, идущими от
снимков стереопары.
Величина продольного параллакса определялась как
произведение скорости синхронно движущихся вдоль снимков сканирующих элементов
на величину задержки времени между появлением подобных сигналов на левом и
правом снимках стереопары. Определялось это время путем анализа выходного
сигнала коррелятора, который должен быть равен максимуму при максимальном
соответствии точек на левом и правом снимках.
При обработке цифровых снимков используется
статистический метод, при котором участок на одном снимке сравнивается с
различными участками на другом снимке. Причем речь идет о дискретных величинах,
так как изображение – это множество пикселов, каждому из которых соответствует
число (x, например, на левом снимке, а y – на правом) являющееся
функцией оптической плотности. Поэтому коэффициент корреляции K можно оценивать по известной формуле:
|
|
(131) |

где ![]() — средние а s¢(X),s¢(Y) стандарты множеств X и Y тех числовых значений, которые принимают
— средние а s¢(X),s¢(Y) стандарты множеств X и Y тех числовых значений, которые принимают
пикселы в сравниваемых окнах. Понятно, что решением является максимальное
значение коэффициента корреляции. На этом принципе и основаны алгоритмы поиска
соответственных точек в большинстве программных продуктов цифровых
фотограмметрических систем. Для того, чтобы уменьшить зону поиска, как правило,
предлагается две-три соответственные точки (иногда и больше) зафиксировать в
ручную. Кроме того, следует отметить, что механизм работает тем лучше, чем
менее монотонно изображение объекта на снимках пары. Поэтому оператору
целесообразно контролировать качество работы коррелятора и вовремя вводить
коррективы.
В некоторых алгоритмах (PHOTOMOD) используются
локально-нормированные значения, плотности, что делает его нечувствительным к
различным уровням яркости и контрастности левого и правого снимков и позволяет
легко различить соответственные точки даже при работе с изображениями плохого
качества. Алгоритм также позволяет изменять размеры корреляционного окна для
достижения нужного компромисса между надежностью и точностью определения
соответственных точек и использовать ряд других параметров настройки
коррелятора. Использование эпиполярных снимков значительно ускоряет работу
коррелятора, так как предполагается, что соответственные точки расположены на
одних и тех же строках растров левого и правого снимков.
5.3.4 Внутреннее ориентирование снимка
в системе координат цифрового изображения (Михайлов)
Процесс внутреннего ориентирования снимка
производится для определения координат точек в системе координат снимка по
значениям их координат в системе координат цифрового изображения. В результате
определяются параметры, характеризующие положение и ориентацию системы
координат снимка Sxyz в системе координат цифрового изображения ocxcyc, а так же параметры, позволяющие исключить
влияние систематической деформации фотоматериала, на котором был получен
исходный аналоговый снимок (рис.61). Для определения параметров внутреннего
ориентирования снимка измеряют координаты изображений координатных меток снимка
в системе координат цифрового изображения.
Выбор метода определения параметров
внутреннего ориентирования снимка зависит от методики фотограмметрической
калибровки съемочной камеры. Если в процессе ее были определены координаты
координатных меток в системе координат съемочной камеры (снимка) Sxyz, то
для определения координат точек в системе координат снимка по значениям их
координат в системе цифрового изображения используют формулы аффинного
преобразования координат:
|
|
(132) |
которые можно представить и в развернутом виде:
|
|
(133) |

Формулы (132) позволяют не только определить положение и
ориентацию системы координат снимка в системе координат цифрового изображения,
но и учесть систематические искажения снимка, возникающие из-за деформации
фотопленки, на которой был получен снимок.
Параметры аффинного преобразования ai, bi можно определить по координатам xc,yc координатных меток снимка, измеренных на
цифровом изображении, и значениям координат x,y этих меток в системе координат снимка,
полученным при калибровке съемочной камеры.
Для определения параметров ai,bi для каждой метки, измеренной на цифровом
изображении, составляют уравнения:
|
|
(134) |

Полученную систему уравнений решают по методу
наименьших квадратов. При этом необходимо иметь не менее 3 координатных меток,
не лежащих на одной прямой.
В практике фотограмметрии возникает задача определения
значений координат точек в системе координат цифрового изображения по
координатам этих точек, полученным в системе координат снимка. Такое
преобразование координат выполняется по формулам:
|
|
(135) |

Или
|
|
(136) |

В формулах (135) и (136) Ai, Bi – элементы обратной матрицы Р-1.Значение
пиксельных координат точек xp,yp определяют по формулам:
|
xp = xc/Δ, yp = yc/Δ |
(137) |
В случае, если при калибровке съемочной камеры
определялись калиброванные расстояния между координатными метками lx, ly (рис.62),
то для перехода от измеренных координат к координатам в системе координат
снимка используют уравнения:
|
|
(138) |

в которых:
a0, b0 – координаты начала системы координат снимка
в системе координат цифрового изображения;
![]() — угол разворота оси х системы
— угол разворота оси х системы
координат снимка относительно оси хс системы координат
цифрового изображения;
kx, ky – коэффициенты деформации снимка по осям x и y.
Если калиброванные расстояния между координатными
метками не известны, то формулы принимают вид:
|
|
(139) |

Значения параметров j, a0, b0, kx, ky определяют по измеренным значениям координат
координатных меток в системе координат цифрового изображения системы, а для
оределения угла ![]() используют соотношение:
используют соотношение:
|
|
(140) |
в котором xc1, yc1 и xc2, yc2 – координаты 1 и 2 координатных меток в системе координат цифрового
изображения.

Значения коэффициентов kx, ky
определяют по формулам:
|
|
(141) |

где xci, yci – координаты координатных меток в системе координат
цифрового изображения.
Параметры a0, b0 находят, как координаты xc, yc точки пересечения прямых линий, проведенных
через координатные метки 1-2 и 3-4, при этом:
|
|
(142) |

В выше приведенных уравнениях:
a1
= (yc2 — yc1)/(xc2 — xc1) и b1 = (yc3 — yc4)/(xc3
— xc4).
Для определения координат точек снимка в системе
координат цифрового изображения по координатам этих точек в системе координат
снимка используют формулы:
|
|
(143) |

в случае, если калиброванные расстояния lx, ly между координатными метками известны, и
формулы:
|
|
(144) |

если указанные расстояния не известны.
Необходимо заметить, что система координат цифрового
изображения левая, поэтому в формулах 138 – 144 координата yc берется с обратным знаком.
Определение пиксельных координат точек изображения
производят по формулам (137).
5.4 ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА
При выводе уравнений одиночного снимка и
снимков пары в качестве исходного положения было принято, что изображение на
них построено в центральной проекции. Однако в действительности это только гипотеза,
хотя и достаточно близкая к реальности.
Погрешности снимка условно можно разделить на
две группы: первая вызывает смещение изображений точек от центральной проекции,
вторая — приводит к снижению качества снимков, и, следовательно, к ухудшению
их измерительных свойств.
К группе источников ошибок, вызывающих
искажение центральной проекции, относятся атмосферная рефракция, механические и
оптические недостатки камеры аэрофотоаппарата, деформация фотоплёнки,
клинообразность светофильтра и др. Рассмотрим перечисленные источники ошибок
более подробно.
Атмосферная рефракция. Искривление хода световых лучей в пространстве
вследствие влияния среды переменной плотности приводит к радиальному смещению
изображений точек в направлении от точки надира. В специальной литературе даны
формулы для учёта этих смещений, основанные на принятии определённой
стандартной атмосферы. Смещения δr увеличиваются пропорционально третьей степени
от r, т.е. по такому же закону, как из-за кривизны Земли,
но знаки у них противоположные. Следовательно, рефракция частично компенсирует
смещение, вызванное кривизной Земли. Отклонение фактической атмосферы на момент
фотографирования от стандартной, а также пренебрежение в формулах для расчета
поправок за наклон снимков, рельефом местности и кривизной Земли приводят к
остаточной ошибке измеренных координат точек примерно ± 2мкм.
Турбулентность воздушных слоёв вблизи
съёмочного объектива вызывает дополнительное искажение координат точек снимка.
Радиальное смещение точек на краю снимка по этой причине может достигать
± 5мкм. При наземной стереофототопографической съемке поправки за кривизну
Земли и вертикальную рефракцию вводятся непосредственно в высоты точек,
определенные по снимкам.
Условия центрального проектирования не
выполняются также из-за механических и оптических недостатков аэрокамеры.
Для каждого снимка существуют погрешности
внутреннего ориентирования: смещения снимка по координатным осям относительно
центра проекции S; ошибки фокусного расстояния f;
ошибки перпендикулярности плоскости изображения Р к главному лучу
камеры; ошибка вращения снимка вокруг оси камеры. В случае плановой съёмки
сравнительно равнинной местности аэрокамерой, калиброванной по стандартной
методике, перечисленные ошибки в основном компенсируются в процессе обработки
модели. В случае перспективной аэросъёмки или плановой аэросъёмки горной
местности эта компенсация возможна лишь частично.
Дисторсия объектива аэрофотоаппарата это один из основных
источников погрешностей, приводящих к искажению снимка (к отклонению от центральной
проекции). Обычно ее подразделяют на радиальную и тангенциальную. Они в свою
очередь бывают систематическими и случайными. Систематическая дисторсия
объектива вызывает смещение Δr точек относительно идеального положения по
радиальным направлениям, проходящим через главную точку снимка. Величина Δr постоянна для точек, расположенных на
окружности радиуса r. Случайная радиальная дисторсия может быть
определена как дифференциальное смещение точки изображения, которое остаётся
после устранения систематической радиальной дисторсии.
Дисторсия объектива аэрофотоаппарата
устанавливается, как правило, в процессе определения элементов внутреннего
ориентирования (калибровки камеры). В паспорте аэрофотоаппарата ее обычно
приводят в виде табличных данных по полю снимка. Современные объективы камер
аэрофотоаппаратов имеют дисторсию от 5 до 60 мкм. Однако, отличие
температурных и атмосферных условий в момент фотографирования от лабораторных
приводит к тому, что фактическая дисторсия не соответствует той, что получена в
процессе калибровки. Разработанные методы позволяют учесть влияние радиальной
дисторсии с погрешностью ± 2 мкм, а тангенциальной ± 5 мкм.
Деформация фотоплёнки. Современные аэрофотоаппараты позволяют получать
фотографическое изображение местности либо на фотоплёнке (что гораздо чаще),
либо на стеклянных пластинках. Фотоплёнка, как носитель эмульсии, деформируется
от времени, изменения температуры, влажности и условий фотообработки.
Деформацию фотоплёнки подразделяют: на
равномерную, неравномерную и случайную. Равномерная деформация характеризуется
смещением точек изображения, которое уменьшается или увеличивается
пропорционально радиальному расстоянию r от центра снимка, т. е. приводит к изменению
масштаба снимка. Этот вид деформации легко учитывается при обработке снимков.
Неравномерная деформация приводит к тому, что размеры снимка вдоль фильма и в
поперечном направлении изменяются на разные величины. Однако это различие, как
правило, не превышает 0.3 %. Влияние неравномерной деформации на смещение точек
может быть учтено только при аналитических способах обработки снимков.
Существенное значение имеют случайная
деформация плёнки и погрешности её выравнивания в плоскость. Случайные
деформации фотоплёнки вызывают смещение точек изображения практически в
произвольном направлении. Они обусловлены эластичными свойствами фотоплёнки и
могут достигать величин порядка 10-20 мкм. Эти деформации подчиняются
определённым законам эластичности, которые не соответствуют закону нормального
распределения.
Среди большого числа источников ошибок,
которые влияют на точность фотограмметрических построений, деформация
фотоплёнки является весьма значительной.
Случайные ошибки выравнивания фотоплёнки
в плоскость во время экспозиции также приводят к искажениям изображения. Сравнить
это можно с изменением фокусного расстояния в точке, где произошло отклонение d от плоскости прикладной рамки. Поэтому величину смещения можно оценить
по формуле:
![]() ,
,
где r — расстояние от центра прикладной рамки.
Из формулы видно, что ошибка δ особенно
сказывается при аэрофотосъёмке короткофокусными аэрофотоаппаратами, значит при
фотографировании необходимо, чтобы фотоплёнка была абсолютно плоской в момент
экспозиции. Поэтому при конструировании топографических аэрофотоаппаратов большое
внимание уделяется разработке механизмов выравнивания плёнки в плоскость. В
современных аэрофотоаппаратах надёжное выравнивание осуществляется с помощью
плоскопараллельной стеклянной пластины, которая устанавливается в плоскости
прикладной рамки камеры, Отклонение от плоскости не должно превышать
10-20 мкм.
Фотограмметрические измерения обычно
производятся по диапозитивным пластинкам. Процесс их изготовления приводит к
дополнительным смещениям точек порядка ± 2 мкм.
Клинообразность светофильтра. При изготовлении светофильтра
непараллельность его плоскостей (клинообразность) допускается не более
10 сек. Если этот допуск выдержан, то клинообразность светофильтра
практически не приводит к искажению положения точек снимка.
Погрешности второй группы оказывают влияние на
точность измерения координат точек аэроснимка через снижение качества его
изображения. Влияют на это разрешающая способности объектива и фотоплёнки, а
также смаз изображения, вследствии фотографирования с подвижного основания и
вибрации аэрофотоаппарата. К этой группе следует отнести также погрешности,
вносимые прибором и наблюдателем.
Общая средняя квадратическая погрешность
измерений на прецизионном приборе координат точек снимка, полученного
широкоугольным аэрофотоаппаратом, с учётом всех её составляющих равна ± 6
мкм в середине и ± 9 мкм – на его краях.
6. Технологии фототопографических
съемок
6.1 Основные
технологические схемы
Прежде всего, заметим, что при топографическом
обеспечении горных работ в основном имеют дело с планами (масштабы 1:500 –
1:5 000), поэтому о картографировании только в этих масштабах и пойдет
далее речь. Существующие технологии составления планов по фотоснимкам можно
представить в виде схемы (рис. 63).
Как ранее упоминалось, из представленных на рисунке
технологий НФС применяется только в горной местности, когда объекты
расположенные ближе к камере не перекрывают картографируемый участок местности.
Ее имеет смысл применять при маркшейдерском обслуживании открытых горных работ,
если экономически невыгодна или невозможна аэрофототопографическая съемка.
Комбинированную АФС применяют, при возникновении проблем с отображением по
фотоснимкам рельефа местности, например, в случаях, когда местность равнинная,
или она закрыта (застроена, покрыта высокой и плотной растительностью), а
также, если повышены требования к точности отображения рельефа. Комбинированную
АФС по возможности пытаются избегать из-за большого объема полевых работ, а
значит высокой их стоимости и низкой производительности.
Стереотопографический метод АФС является основным, и
его не применяют только по причинам, которые были обозначены выше. Таким
образом, есть веские основания начать изучение АФС с рассмотрения технологии
стереофототопографической съемки.
6.2
Стереотопографический метод АФС
6.2.1 Технологически схемы
Сущность метода заключается в том, что в камеральных
условиях по фотоснимкам получают и контурную часть плана, и изображение
рельефа. Полевые работа необходимы только для определения плановых координат
(высот) опознаков и дешифрирования снимков.
Теоретической основой метода является
решение двойной обратной пространственной фотограмметрической засечки. Но
характер и последовательность выполнения основных процессов зависит в основном
от двух факторов: применяемого для обработки снимков оборудования, и
необходимости составления фотоплана (ортофотоплана).
Заметим, что в процессе развития
стереофототопографического метода, было предложено 4 разных концепции
использования пары снимков для составления по ним планов и карт. Первая связана
с расчленением технологии на отдельные: процессы. Вторая предполагала
физическое построение с помощью аэро или наземных снимков точных
пространственных моделей (геометрически подобных уменьшенных копий того, что
имело место в процессе фотографирования местности). Решение двойной обратной
пространственной засечки обходилось в этом случае без значительных
математических расчетов. В третьей было реализовано аналитическое решение
основных процессов указанной выше засечки: восстановление связок проектирующих
лучей (внутреннее ориентирование снимков), взаимное ориентирование (построение
модели), внешнее ориентирование модели, определение координат точек местности.
Четвертая основана на цифровой обработке информации современными средствами
вычислительной техники.
На основе первых двух концепций
появились в свое время (в рамках стереотопографической съемки местности) два
метода картографирования по снимкам дифференцированный и универсальный.
В дифференцированном методе
картографирования, каждый процесс выполнялся по своей технологии только для
него предназначенными средствами. При этом элементы взаимного ориентирования
снимков определялись по результатам измерений координат и параллаксов
соответственных точек на стереокомпараторах. Изображение рельефа местности
осуществлялось путем измерения пары плановых снимков на стереометре, который в
30x годах сконструирован Ф.В. Дробышевым.
Трансформирование снимков производилось на фототрансформаторах. Несмотря на то,
что указанная технология имела выдающееся значение при картографировании территории
СССР в масштабе 1:25 000 и 1:100 000, на ней не стоит
останавливаться, так как она теперь имеет только историческое значение. Приборы, предназначенные для реализации универсального метода
стереотопографической съемки, и назвали универсальными аналоговыми приборами. А
поскольку оператор выполнял на них стереоизмерения, то полное их название – универсальные
аналоговые стереофотограмметрические приборы. Следует отметить, что эра и этих
приборов близка к закату. Их уже не производят и из производственного процесса
постепенно исключают, так как возможности этих приборов значительно ограничены
и по производительности и по параметрам обрабатываемых снимков, и по учету
различных искажений снимков (кривизны Земли и рефракции, деформации
эмульсионного слоя, дисторсии объектива и проч.).
На смену моделирующим приборам пришли
аналитические стереоприборы, у которых таких ограничений нет. Их
предшественники стереокомпаратор и вычислительная машина. И именно отсутствие
соответствующих средств вычислений долгое время сдерживало развитие
аналитической фотограмметрии. В настоящее время на производстве имеется парк
универсальных аналитических стереофотограмметрических приборов. Но и их век
весьма ограничен, так как выяснилось, что высокоточные измерения, причем с элементами
автоматизации, можно выполнять и на экране монитора.
К цифровым методам обработки снимков
привело бурное развитие вычислительной техники. За ними не только будущее, но,
пожалуй, уже и настоящее. На первый взгляд цифровые и аналитические методы это
одно и тоже. Но это не так. В аналитических методах основным источником
информации является фотоснимок, который и измеряется оператором для определения
координат и параллаксов. Значит аналитический прибор, как обрабатывающая
система обязательно имеет той или иной конструкции стереокомпаратор. Цифровые
методы имеют дело с цифровым снимком на магнитном носителе, который получают
как результат сканирования фотоизображений или путем фотографирования цифровыми
камерами. Часть информации может быть получена в процессе дигитализации
существующих картографических материалов. Все это обрабатывается синтетически
на компьютере. Результат обработки контролируется на экране дисплея, в том
числе и в трехмерном виде.
Фотопланы (ортофотопланы) как основу
топографического плана есть смысл составлять, если снимаемая территория
(незастроенная, с рассредоточенной и малоэтажной застройкой) характеризуется
большим количеством контуров. В соответствии с рекомендациями инструкции [9],
при съемке в масштабе 1:5 000 фотопланы используют как основу при любом
характере застройки. Но при съемке участков с многоэтажной застройкой земной
поверхности в масштабах 1:2 000 и крупнее фотопланы не составляют.
С учетом всего сказанного,
последовательность выполнения технологических процессов в стереотопографическом
методе съемки можно представить так, как это сделано на рис. 64.
6.2.2 Летносъемочный процесс
Как указывалось выше, целью лётно-съёмочных
работ является получение аэрофотоснимков местности определенного качества.
Аэрофотосъёмка для картографических целей производится АФА, как правило, с
пилотируемых самолётов, пролетающих над местностью по заранее намеченным на
карте маршрутам (маршрут — ряд перекрывающихся снимков одного направления).
Прокладывают их так, чтобы снимки без разрывов покрывали всю картографируемую
территорию. Для этого планируют и поперечные перекрытия Q
между снимками смежных маршрутов. Для того чтобы получить снимки заданного
качества, перед фотографированием местности выполняют расчет параметров
аэрофотосъемки и составляют полетную карту на топографической основе, как
правило, более мелкого масштаба, чем масштаб аэрофотосъёмки.
Для расчета необходимо знать размеры съёмочного
участка, масштаб составляемого плана, фокусное расстояние аэрофотоаппарата,
масштаб фотографирования и характеристику местности (в частности, его рельефа).
Съёмочный участок наносят на полетную карту. Обычно
его границами служат рамки трапеций. При съёмках с целью создания карт и планов
в масштабах 1:25 000, 1:10 000, 1:5 000, 1:2 000
минимальный размер съёмочного участка ограничивается рамками трапеций в
масштабе на один ряд более мелком, чем масштаб фотографирования. Например, при
съёмке с целью создания карты в масштабе 1:25 000 минимальный съёмочный
участок ограничивается рамками трапеции масштаба 1:50 000. Если создаются
топографические планы в масштабах 1:1 000 и 1:500, площадь съёмочного
участка не должна быть менее 1 км2.
Для стереотопографического метода съемки важно
учитывать, что точность определения высот точек по результатам измерения продольных
параллаксов обратно пропорциональна высоте фотографирования. Значит, при
заданном масштабе фотографирования, чтобы лететь пониже, необходимо
использовать короткофокусные АФА (f = 70 – 100мм). Если технологией предусмотрено
составление фотоплана, то возникает противоречие, так как для уменьшения
смещения точек за рельеф следует лететь повыше (Это не относится к цифровой
технологии, если предполагается процесс ортофототрансформирования снимков). В
такой ситуации фотографирование местности выполняют двумя коротко и
длиннофокусными АФА, при соотношении масштабов фотографирования 1:2. При этом
фотографирование в одном направлении осуществляют двумя камерами, в обратном –
только длиннофокусным АФА. В процессе составления плана снимки с мелким
масштабом используют для стереоскопической рисовки рельефа, крупномасштабные
снимки – для составления фотопланов и дешифрирования.
Масштаб фотографирования зависит от масштаба
составляемого плана, высоты сечения рельефа, а также от возможного соотношения
между масштабами снимка и составляемого плана (то есть от характеристик
используемого фотограмметрического оборудования). В инструкции [9, табл. 16 и
17] приведены соответствующие рекомендации. В цифровой фотограмметрии, где
пределов на увеличение практически нет, указанное выше соотношение не следует
выбирать более 10 (имея в виду, предельную графическая точность, равную 0.1 мм,
и точность измерения снимков на мониторе компьютера не выше 0.01 мм).
После выбора m и f.рассчитывают
высоту фотографирования Н над средней плоскостью съёмочного участка H = mf.
Величины продольного Р и поперечного Q
перекрытий регламентированы основными положениями [7], но в любом случае для
обработки стереопар Р не должно быть меньше 50 %.
Поперечные перекрытия Q ограничивают 20-40 %.
Значения Р (заданное) и Q
(расчетное) регламентируют длину базиса фотографирования В и расстояние
между осями смежных маршрутов D. Они вычисляются по формулам:
|
|
(145) |
где lx и
ly – длины сторон снимка, расположенные соответственно
вдоль и поперёк маршрута.
Протяжённости съёмочного участка по направлению полёта
Lx и в поперечном направлении Ly измеряются по карте. Имея значения Lx и Ly, можно установить число маршрутов N и
число снимков n в каждом маршруте.
|
|
(146) |
Два снимка и один маршрут добавляют для
обеспечения границ съёмочного участка, а каждую из дробей при вычислении
округляют в сторону большего целого числа. Общее число снимков k = Nn.
Чтобы выполнить съёмку с заданным продольным
перекрытием, рассчитывается интервал τ между экспозициями в секундах, по
формуле:
|
|
(147) |
где В – базис фотографирования в км, а W
— путевая скорость самолета
в км/час.
Поскольку самолет в момент экспозиции летит, точки на
снимке изображаются отрезками (изображение смазывается). В соответствии с
основными положениями [7] допустимая величина δ «смаза» равна
0.05 мм. Добиваются удовлетворения этого требования либо применением в АФА
компенсатора сдвига изображения, либо расчетом предельно допустимой экспозиции t по
формуле:
|
|
(148) |
Используя результаты выше приведенных
расчетов, для каждого съёмочного участка на полетную карту наносят оси
маршрутов. На каждом маршруте выбирают ориентиры и указывают их магнитные
путевые углы.
Фотографирование каждого съёмочного участка
выполняется непрерывными маршрутами одним и тем же аэрофотоаппаратом, при одних
и тех же перекрытиях и неизменной высоте полета по отношению к его средней
плоскости. Аэрофотосъёмка может выполняться с использованием
гиростабилизирующей системы и специальных приборов. Производится она в основном
в безоблачную погоду при высоте Солнца над горизонтом не менее 20°.
В процессе производства аэрофотосъёмки
одновременно с получением фотоснимков фиксируются превышения и высоты точек
фотографирования. В процессе съёмки могут быть определены также и их
координаты.
Аэрокамера ориентируется в аэрофотоустановке
так, чтобы сторона снимка была параллельна направлению полёта носителя. Если
это условие не выполняется, то снимки перекрывающимися частями накладываются
друг на друга уступом (образуется «ёлочка») и, как следствие, уменьшается
площадь перекрытий.
Если картографируемый участок беден контурами,
фотографированию может предшествовать маркировка точек местности. Это, как
правило, знак на местности в форме креста, со свободным пространством в центре.
Длина и ширина каждого луча должна быть не менее 0.15 и 0.05мм соответственно в
масштабе снимка, а расстояние луча от центра знака – 0.05мм. Цвет знаков должен
быть контрастным по отношению к окружающему фону.
После производства лётно-съёмочных работ,
фотографической обработки экспонированных плёнок, нумерации негативов
местности, плёнок статоскопа и радиовысотомера, на фотобумаге изготавливают
контактные отпечатки (снимки) и составляют из них накидной монтаж –
фотографическое изображение местности, полученное путём совмещения контактных
отпечатков перекрывающимися частями.
Качество материалов аэрофотосъёмки оценивается
по фотографическим и фотограмметрическим показателям. Фотографическое качество
проверяется сличением аэрофильма с эталоном или посредством фотометрических
определений плотностей. Проверяется также качество изображения координатных
меток, часов и уровня, отсутствие механических повреждений эмульсии и т.д.
Фотограмметрическое качество оценивается с
целью определения соответствия параметров полученных снимков заданным
параметрам фотографирования. По измерениям на накидном монтаже проверяют:
соответствие перекрытий снимков; прямолинейности маршрутов аэрофотосъёмки и
параллельности базисов фотографирования сторонам снимка («ёлочки») допустимым
значениям. По измерениям снимков устанавливают также соответствие фактической
высоты фотографирования заданному значению; оценивают предельные углы наклона
снимков и выравнивание фильма в плоскость.
Методика оценки, а также качественные и
количественные характеристики допустимых показателей излагаются в нормативных
документах или в специальных технических условиях, например в основных
положениях [7].
В результате выполнения лётно-съёмочных работ
для последующей фотограмметрической обработки получают аэронегативы, контактные
отпечатки, репродукции накидного монтажа и их негативы, негативы показаний
спецприборов, паспорт аэрофотосъёмки. В паспорте аэрофотосъёмки указываются:
тип самолёта, на котором установлена аппаратура; фокусное расстояние
аэрофотоаппарата и постоянные статоскопа; расстояние между координатными
метками прикладной рамки или координаты оптических меток; величина
фотограмметрической дисторсии по осям и зонам; координаты главной точки.
В заключение этого параграфа отметим, что
выбор технологии обработки снимков (аналоговый она или цифровой) мало влияет на
характер летносъемочных работ. Дальше этот фактор становится принципиальным. Но
ряд процессов являются общими для любой технологии. К ним можно отнести
трансформирование снимков, сгущение сети (фототриангуляцию) и дешифрирование.
Поэтому на них и остановим пока свое внимание.
6.2.3 Трансформирование
снимков и составление фотоплана
6.2.3.1 Общие положения
Из рис. 52 следует, что некоторые технологические
варианты стереотопографической АФС предусматривают составление фотопланов или
ортофотопланов. Фотоплан (ортофотоплан) это фотографическое изображение
местности составленное из трансформированных снимков (ортофотоснимков) одного
масштаба. Как правило, их составляют на полную трапецию, и выполняют зарамочное
оформление, как у плана. По точности они должны соответствовать плану.
Фотографическое изображение местности, составленное из плановых снимков, называется
фотосхемой. Их точность ниже точности фотопланов, поэтому они используются для
приближенных количественных оценок в лесоустройстве, землеустройстве и т.д.
Фотосхемы бывают одномаршрутные и многомаршрутные.
Трансформирование снимка в широком смысле это
целенаправленное изменение его геометрических свойств с целью преобразования в
заданную проекцию. Каждое преобразование изменяет одни геометрические свойства
исходного изображения и сохраняет другие. Те свойства, которые не изменяются,
называются инвариантами относительно данного геометрического преобразования.
В фотограмметрии чаще всего используются
перспективное и афинное преобразования, ортофототрансформирование и
масштабирование.
Трансформированным называется снимок,
полученный путем перспективного преобразования наклонного снимка и имеющий
допустимые величины смещений точек от их горизонтальной проекции. Отметим, что
оно не меняет проекции. Трансформированный снимок тоже построен по законам
центральной проекции. Поэтому искажения за рельеф остаются. Доводят их до
допустимых значений путем соответствующего выбора плоскости трансформирования,
относительно которой превышения точек местности не превосходят установленных
значений. Если же местность холмистая, снимок трансформируют по частям (зонам),
выбирая для каждой зоны свою плоскость трансформирования. При числе зон больше
3 возникают трудности в процессе составлении фотоплана, поэтому вместо
перспективного трансформирования применяют ортофототрансформирование.
Ортофотоснимок построен в ортогональной проекции,
то есть при ортофототрансформировании происходит переход от центральной
проекции исходного снимка к ортогональной проекции снимка, полученного после
трансформирования. Искажений за рельеф у таких снимков нет. Но выполнить
ортофототрансформирование можно только после построения геометрической модели
местности по паре снимков. Поэтому оно будет рассмотрено позже.
6.2.3.2
Перспективное трансформирование
Перспективное трансформирование может быть
выполнено различными способами: графическим, оптико-графическим,
фотомеханическим, аналитическим и т.д. В фотограмметрии наибольшее применение
получили два последних.
Теоретическим обоснованием аналитического
способа являются формулы трансформирования (40).
Для вычисления по ним необходимо выполнить измерения координат x и y
точек, трансформированные координаты которых требуется получить, и знать
элементы внешнего ориентирования наклонного снимка. Точное их значение обычно
неизвестно, поэтому трансформируют по опорным точкам (опознакам). Для
определения минимального числа опознаков, воспользуемся уравнениями
коллинеарности (30). При этом примем координаты
центра проекции равными нулю и разделим числители и знаменатели правых частей
на – c3f, в результате получим:

где, например, A1=Ha1/c3f, B1=Hb1/c3f, и т.д.
Если координаты опознаков, координаты их
изображений на снимке и элементы внутреннего ориентирования снимка известны, то
неизвестными в уравнениях являются восемь коэффициентов. Они однозначно
определяют перспективную зависимость между наклонным и горизонтальным снимками.
Эти коэффициенты называют элементами трансформирования. Поскольку один опознак
позволяет составить два уравнения, то для определения коэффициентов их нужно
как минимум 4. Зная их можно выполнять трансформирование, используя уравнения (40), но для приведения трансформированного снимка к
заданному масштабу все полученные координаты x0 и y0 умножают на коэффициент трансформирования k,
то есть трансформированные ккоординаты xт=kx0, и yт=ky0.
Для того, чтобы понять суть фотомеханического
трансформирования (его еще называют оптико-механическим), предположим, что
элементы внутреннего и внешнего ориентирования снимка известны. Восстановим
связку проектирующих лучей и поместим ее в положение, которое она занимала в
момент фотографирования, затем пересечем связку горизонтальной плоскостью E
(рис. 65).
В результате на экране получим трансформированное
изображение наклонного снимка. В соответствии с рис.65 его масштаб можно
вычислить по формуле:
где k – коэффициент трансформирования, H0 — высота
фотографирования над средней плоскостью участка (плоскостью трансформирования).
На практике, по уже известным причинам,
установку связки относительно экрана выполняют по опознакам. Для этого на экран
укладывают основу с, опознаками (их должно быть не менее четырех), выполненную
в масштабе, который равен заданному масштабу трансформированного изображения.
На снимке делают отверстия (диаметром 0.2 – 0.3 мм) в точках, где изобразились
опознаки, и с помощью проектора проецирую его на экран. Затем взаимным
перемещением основы и проектора добиваются, чтобы изображения спроектированных
на экран отверстий совпали с соответствующими трансформационными точками на
основе, после чего последнюю убирают. В результате изображение на экране будет соответствовать
трансформированному снимку. Его нужно только зафиксировать, например,
сфотографировать.
Отметим, что рассмотренная выше технология
работает идеально при трансформировании наклонного снимка равнинной местности.
Если местность холмистая, то необходимо учитывать смещения точек за рельеф.
Например, в соответствии с рис. 65, при установке связки нужно добиваться, либо
совмещения точек a¢ и a0, либо точек a и a¢0,
так как именно эти пары находятся в перспективном соответствии (расположены на
одних и тех же проектирующих лучах). Значит перед процессом совмещения
необходимо ввести поправки в положение всех опознаков, либо на снимкеdrc, либо на основе dr0. Вычисляются
они по формулам:
|
drc=-rh/H0 |
(150) |
Как правил, поправки вводят на основе, при условии,
что они больше 0.3 мм. Полученные в результате точки для совмещения называют
ориентирующими.
Нельзя, кроме того, забывать, что на
трансформированном снимке будут смещены все точки, расположенные выше или ниже
плоскости трансформирования. И если эти искажения больше допустимых, снимок
следует трансформировать по частям (по зонам).
Прибор, с помощью которого реализуется, выше
рассмотренная, технология перспективного трансформирования называется
фототрансформатор. По существу это усовершенствованный высокоточный
фотоувеличитель. Основными частями фототрансформатора являются: направляющие,
экран, кассета, объектив и источник света с параболическим отражателем.
Имеется, кроме того, система винтов и устройств, обеспечивающих путем взаимного
перемещения кассеты, объектива и экрана построение на экране
трансформированного изображения в заданном масштабе.
Различают фототрансформаторы I и II
рода. В фототрансформаторах I рода трансформирование выполняется при сохранении
той связки проектирующих лучей, которая существовала в момент фотографирования.
Рассмотрим, используя рис. 66, как в этом случае подбирается фокусное
расстояние его объектива.
Предположим, что через отрезок Aa на
рисунке проходит главная оптическая ось объектива S, а
через точку схода i его
главная фокальная плоскость. Известными при выборе фокусного расстояния F
объектива считаются: фокусное расстояние снимка, f,
его угол наклона e и
коэффициент трансформирования k. В соответствии с рис. 66 можно
записать:
Выразим функцию синуса в формуле (151) через тангенс:
|
|
(152) |

Из треугольника SNT имеем:
|
|
(153) |
А из треугольников Soi и SNK следует:
|
Fp=f/sine и Fe=kf/sine |
(154) |
Поэтому:
![]()

С учетом полученного равенства и соотношения (152):

И, наконец, с учетом выражения для sinje и
первой формулы соотношения (154) окончательно получим:
|
|
(155) |

Мы теперь не просто знаем, как подбирать
объектив, но видим существенный недостаток трансформатора I рода:
необходимость иметь бесконечно большой набор объективов с различными фокусными
расстояниями, если требуется трансформировать снимки при различных параметрах f,
e и
k. Рассмотрим, как этот недостаток преодолеть.
Предположим, что началом координат на снимке
является точка i, а на экране точка K.
Пусть оси ординат направлены вдоль линий главного вертикала и направления
съемки. Тогда из подобия треугольников ASK и Sai
имеем: Y=FpFe/y Так же легко доказать, что X=xFe/y.
Полученные равенства показывают, что перспективное соответствие между наклонным
и горизонтальным снимками не нарушается при изменении f,
e и
k, если не изменяются отрезки Fp и
Fe. То есть, можно подбирать не объектив к
исходным параметрам, а наоборот изменять эти параметры так, чтобы они подходили
к объективу фототрансформатора, но не изменяли выше указанных отрезков Fp
и Fe, которые в связи с этим назвали инвариантами трансформирования. Ясно,
что при этом изменится положение точки S, но только в пределах плоскости главного
вертикала. Такая технология реализована в фототрансформаторах II рода,
которые и используется на производстве. Теперь можно сформулировать условия
(геометрические и оптические), при которых на экране будет построено
изображение трансформированного снимка высокого качества. Геометрические
условия:
1. Центр проекции S
должен располагаться в плоскости главного вертикала на окружности с центром в
точке i и радиуса Fp=f/sine.
2. Плоскость экрана должна быть параллельна отрезку
Si, а отрезок Fe=kf/sine.
Оптические условия:
1. Расстояния вдоль оптической оси объектива от
центра проекции до снимка и экрана должны удовлетворять формуле оптического
сопряжения.
2. Для достижения хорошей резкости в пределах
всего трансформированного изображения необходимо, чтобы плоскости снимка,
объектива и экраны пересекались по одной прямой (условие Шейпфлуга).
Заметим, что выполнение оптических условий в
фототрансформаторах выполняется автоматически, с помощью специальных устройств
– инверсоров. Так, выполнение первого из условий обеспечивает масштабный
инверсор, а второго – перспективный.
Кроме того, нельзя не отметить, что установка
снимков в кассету фототрансформатора осуществляется по координатным меткам с
помощью рисок, нанесенных на стекле. Поэтому оптическая ось объектива проходит
практически через главную точку. Но в соответствии с рис. 66 главная точка
должна быть смещена на величину d (отрезок oa). Технологией такая операция предусмотрена и
называется децентрацией снимка. Таким образом, элементами трансформирования
снимков следует считать угловые величины jp,
je, k и линейные — d1, d2,d.
На производстве использовалось большое число
самых разнообразных по конструкции фототрансформаторов, как отечественных, так
и зарубежных. Наиболее популярными были: фототрансформатор
большой (ФТБ), фототрансформатор малый (ФТМ), и фототрансформаторы фирмы Карл
Цейсс (ГДР).
6.2.4 Составление фотоплана
В зависимости от целевого назначения различают
фотопланы топографические и специальные. Первые составляют в
общегосударственной разграфке с соблюдением инструкций и наставлений по
топографическим съемкам (например, инструкции [9]). Специальные фотопланы
составляют, как правило, в произвольной разграфке, и они должны удовлетворять
требованиям ведомственных инструкций. В отличие от графического плана,
фотопланы обладают большей наглядностью, поэтому многими специалистами и
используются. На них могут быть нанесены горизонтали. В результате получается
фотокарта.
Фотопланы составляют из трансформированных снимков путем
монтажа их на основе по опорным точкам. Иногда их составляют из плановых
снимков, если при фотографировании местности применялись АФА с
гиростабилизирующей установкой. Действительно, в соответствии с формулой (51) и
с учетом коэффициента трансформирования можно записать:
![]() .
.
Пусть f=200 мм, r=70
мм, e=10¢ и k=2,
тогда смещение за наклон dre=0.14
мм, что вполне удовлетворительно. Значит, снимки можно просто увеличить до
масштаба составляемого фотоплана, после чего и выполнять монтаж.
Фотоплан составляют на жесткой основе (бумаге,
наклеенной на алюминий, авиационной фанере или пластике), на которой по
координатам в заданном масштабе нанесены опознаки, пункты геодезической сети и
трансформационные точки. Выполняют это либо путем монтажа отдельных фотоснимков
либо путем оптического монтажа с одновременным трансформированием по зонам.
Основными процессами составления первым из названных способов являются:
подготовительный, монтаж снимков, контроль качества фотоплана и его оформление.
Подготовительные работы включают: подбор фотоснимков
по трапециям и по маршрутам в пределах трапеции; контроль их качества и
точности трансформирования; пробивку пуансоном отверстий диаметром около 1 мм
на всех опорных, трансформационных точках, и пунктах геодезической сети.
Контроль точности трансформирования выполняют путем совмещения отверстий на
снимке с соответствующими точками на основе так, чтобы отклонение центров
отверстий от точек были одинаковыми. Снимки, для которых эти отклонения
превышают 0.4 мм, а также снимки с резкими изменениями фототона трансформируют
заново.
Монтаж начинают с левого снимка северного маршрута.
Его укладывают на основу, усредняют погрешности совмещения центров отверстий с
точками на основе и закрепляют грузиками. Затем на основу укладывают второй
снимок, так же совмещают отверстия с опорными точками и, закрепив его,
проверяют сходимость контуров в зоне перекрытия. Для этого накалывают четкий
контур на верхнем снимке и проверяют, где он оказался на нижнем снимке.
Отклонение накола от контура не должно превышать 0.7 мм. После этого разрезают
оба снимка одновременно примерно посередине продольного перекрытия. Линия
пореза не должна проходить через ответственные контуры и вдоль линейных
объектов. Обрезки от каждого снимка сохраняют для последующего контроля, а
соответствующие части первого и второго снимков наклеивают на основу.
Аналогичные операции выполняют при соединении второго и последующих снимков
маршрута, а также при монтаже снимков смежных маршрутов. Но в последнем случае
контроль сходимости контуров, а также порез, осуществляют и по поперечным
перекрытиям.
У снимков трансформированных по зонам пуансоном
пробивают отверстие не в трансформационных точках, а в точках, которые
получаются после введения поправок за рельеф. А после их совмещения с точками
на основе и проверки сходимости контуров разрезают снимки вдоль границ зон.
После окончания монтажа всех снимков, получившееся
изображение обрезают параллельно рамке трапеции, отступая от границ на 1 см.
Оптический способ составления фотопланов выполняют на
основе с наклеенной фотобумагой, путем трансформирования снимков по зонам.
Основу укладывают на экране фототрансформатора и сверху покрывают рубашкой
(светонепроницаемым листом бумаги), на которую наносят сетку координат, пункты
геодезической сети, опорные точки опознаки, углы рамки трапеции и границы зон.
В положение точек на снимке (перед установкой его в кассете) вводят поправки за
рельеф. Совмещают точки на рубашке с изображениями отверстий. Ланцетом вырезают
часть рубашки, соответствующую первой зоне, производят экспонирование и эту
часть вновь заклеивают. Также экспонируют вторую зону и т.д. После
экспонирования всех зон производят фотохимическую обработку.
Контроль качества монтажа выполняют по точкам, порезам
и сводкам. Отклонение центров отверстий, пробитых пуансоном, от точек на основе
не должны быть более 0.5 мм для равнинных и всхолмленных и 0.7 мм для горных
районов. При контроле по порезам используют обрезки снимков, которые укладывают
на фотоплан по линиям пореза, после чего иглой накалывают характерные контуры.
Отклонения наколов на фотоплане от соответствующих контуров не должны превышать
соответственно 0.7 и 1.0 мм. Аналогичен контроль по сводкам смежных фотопланов
с допусками 1.0 и 1.5 мм.
После контроля на фотоплане вычерчивают рамку
трапеции, километровую сетку, пункты сети и выполняют зарамочное оформление.
Для практического использования с него изготовляют копии на матовой фотобумаге,
наклеенной на жесткую основу.
При составлении фотосхем контактные отпечатки монтируют
на картон или фанеру с предварительно наклеенной на них бумагой. Монтаж
выполняют по начальным направлениям или по контурам.
В первом случае на фотоснимках выбирают центральные
точки (контурные точки в близи их центров, хорошо опознающиеся на смежных снимках)
и через них на каждом нечетном снимке проводят начальные направления. На каждом
четном снимке посередине продольных перекрытий (вблизи начальных направлений)
выбирают контрольные точки и в них, а также в центральных точках пуансоном
пробивают отверстия. Затем укладывают на доску первый и второй снимки,
совмещают их по контрольной точке и ориентируют второй снимок так, чтобы его
центральные точки оказались на начальном направлении. В этом положении снимки
разрезают, обрезки убирают, а оставшиеся их части наклеивают на основу. Так же
монтируют и остальные снимки.
Во втором случае поступают практически также, но
снимки совмещают по одноименным контурам способом «мигания», проверяя качество
совмещения с помощью наколов.
При составлении многомаршрутных фотосхем монтаж
начинают со средних снимков среднего маршрута и развивают его к границам
сфотографированного участка.
Контроль качества монтажа осуществляют по порезам.
Масштаб фотосхемы можно определить по карте или по координатам изобразившихся
пунктов геодезической сети.
6.2.5 Понятие о привязке снимков.
Ранее было показано, что для выполнения тех или иных
фотограмметрических процессов, нужны точки с известными координатами и
высотами, положение которых можно точно указать на снимке. Такие точки были названы
опознаками. Например, для трансформирования фотоснимка требуется не менее
четырех опознаков, для внешнего ориентирования модели – не менее трех.
Получить опознаки можно в процессе выполнения полевых
работ. Для этого нужно взять контактные отпечатки (снимки), выехать на
местность, которая на них изображена, найти характерные точки местности, точно
опознающиеся на снимках (в требуемых в соответствии с технологией местах) и
наколоть их. Затем провести линейно-угловые измерения, вычислить координаты и высоты
точек, а на обратной стороне сделать абрис, точно указав, координаты какой
точки были определены. Такая работа называется привязкой снимков, причем ее
называют планово-высотной, если у опознаков определяют все три координаты;
плановой – при определении только плановых координат и высотной, если требуются
только высоты точек.
Можно задаться целью и получить в поле все опознаки,
необходимые в процессе обработки снимков. Такая привязка снимков называется
сплошной. Но она чаще всего экономически невыгодна. Существуют и камеральные
способы определения опознаков, а они, как известно, почти всегда дешевле и
производительнее полевых измерений. Поэтому на производстве предпочитают
выполнять, так называемую, разряженную привязку снимков. Все же не достающиеся
опознаки получают в процессе фотограмметрического сгущения (по-другому этот
процесс называется фототриангуляцией).
Перед выполнением работ по привязке снимков составляют
проект, используя для этого карты или схемы, масштаб которых в 2-5 раз, мельче
масштаба картографирования. При разряженной подготовке учитывают, что ошибки
последующего фотограмметрического сгущения во многом зависят от расстояний
между смежными опознаками. Поэтому эти расстояния регламентируются инструкциями
или рассчитываются с учетом ошибок фототриангуляционных построений. При
составлении проекта учитываются требования инструкции [9], пункты 12.5-12.10.
Следует отметить, что успехи в спутниковых методах определения точек
фотографирования, позволят, в конце концов, полностью исключить привязку
снимков из технологического процесса.
6.2.6 фототриангуляция
6.2.6.1 Основные
понятия
Из предыдущего параграфа следует, что фототриангуляция это камеральное
сгущение сети опознаков, полученных в процессе полевых работ. Сущность
фототриангуляции в построении по снимкам модели, ее ориентировании и
определении координат точек сгущения. Если определяют только плановые
координаты точек, то фототриангуляцию называют плоскостной, а если все три
координаты – пространственной. В настоящее время на производстве используют в
основном пространственную фототриангуляцию. Классифицируют ее также по
количеству маршрутов, участвующих в построении модели и применяемым техническим
средствам.
Пространственная фототриангуляция может быть
одномаршрутной (маршрутной) или многомаршрутной (блочной). Поскольку
минимальное число точек, необходимых для внешнего ориентирования модели, не
зависит от числа маршрутов, участвующих в ее построении, то особенно выгодна
блочная фототриангуляции, так как значительно сокращается объем полевых работ.
В зависимости от применяемых технических средств
различают аналитическую, аналоговую и аналого-аналитическую фототриангуляцию. В
аналитической пространственной фототриангуляции построение модели и определение
координат точек сгущения выполняется на ЭВМ по результатам измерения снимков на
стереокомпараторе (аналитическом стереоприборе) или непосредственно на ЭВМ.
Этот вариант не накладывает ограничений на формат и элементы ориентирования
снимков. Он отличается наивысшей производительностью труда и точностью, так как
в процессе машинной обработки результатов измерений учитываются все
систематические погрешности, влияние которых можно выразить в математической
форме.
В аналоговой фототриангуляции построение модели
осуществляется на универсальных аналоговых стереофотограмметрических приборах.
При этом можно строить как отдельные модели, так и общую модель для маршрута.
Однако, поскольку эра таких приборов практически завершена, рассматривать
аналоговую (и аналого-цифровую) фототриангуляцию смысла нет.
Заметим, что фототриангуляцию вначале выполняют по
каркасным маршрутам, если при аэрофотосъемке они были проложены. В результате
обеспечиваются необходимым числом точек заполняющие маршруты, и можно строить
заполняющие сети.
6.2.6.2 Аналитическая маршрутная
фототриангуляциа
Следует сказать, что технологий ее выполнения довольно
много. Рассмотрим те, что были предложенные в свое время Советскими
фотограмметристами и хорошо раскрывают суть дела. Речь идет о способах частично
зависимых моделей, независимых моделей и связок.
Сущность способа частично зависимых моделей в том, что вначале строится модель по первой
стереопаре. За начало фотограмметрической системы координат принимается центр
проекции левого снимка. Его угловые элементы внешнего ориентирования и базис
фотографирования устанавливаются произвольно. Затем строится модель по второй
стереопаре. Но за угловые элементы внешнего ориентирования ее левого снимка
принимаются величины, которые характеризуют его положение относительно
фотограмметрической системы координат используемой для построения первой
модели. Так поступают с третьей и всеми последующими моделями. Зависимость в
результате состоит в том, что оси фотограмметрических координат всех моделей
оказываются взаимно параллельными.
Алгоритм решения задачи может быть сконструирован
следующим образом. Предположим, что построение любой модели в маршруте
осуществляется поворотом, как левого, так и правого снимков. Тогда при решении
задачи задействованы следующие величины:
-угловые элементы внешнего ориентирования левого снимка aл wл kл,, они известны;
—элементы
взаимного ориентирования aл¢ и kл¢, характеризующие поворот левого снимка при
построении модели, но с другой стороны, тоже являющиеся угловыми элементами
внешнего ориентирования левого снимка, но относительно базисной системы
координат. Они вычисляются в процессе взаимного ориентирования.
-элементы взаимного ориентирования aп¢ w¢п и kп¢ характеризующие поворот правого снимка, но являющиеся
и его угловыми элементами внешнего ориентирования в базисной системе координат;
-элементы внешнего ориентирования правого снимка aп wп и kп. относительно той же системы фотограмметрических
координат, что и aл wл kл. Их
и нужно вычислить, для построения следующей модели.
Обозначим матрицы направляющих косинусов,
соответствующие указанным выше системам угловых элементов внешнего
ориентирования через Aл, AЛ, AП
и Aп. Таким образом матрица Aп –
искомая. Очевидно, что каждой системе угловых элементов внешнего ориентирования
отвечает система уравнений связывающих фотокоординаты точек на снимке с их
пространственными координатами. Эти уравнения известны. Они имеют вид:
 ,
,  ,
,  ,
, 
Из этих соотношений
сразу же следует, что
 и
и 
Координаты пары соответственных точек (XЛ¢ YЛ¢ ZЛ¢ и XП¢ YП¢ ZП¢), а также (XЛ² YЛ² ZЛ² и XП² YП² ZП²) определяются в разных системах, но их оси
параллельны, то есть преобразование происходит из параллельных систем в
параллельные, поэтому: ![]() , или
, или
![]()
Возможно, формула
будет понятнее, если поменять нижние индексы
![]()
Для вычисления нужны, кроме того, углы наклона базиса n и t. Поскольку это углы, характеризующие поворот базисной системы координат
относительно системы, используемой в дальнейшем для определения координат точек
модели (т.е. которой соответствуют угловые элементы aл wл kл), можно сразу же написать:
![]()
Используя эти углы и произвольно выбранное значение базиса
фотографирования, можно вычислить его составляющие и координаты центра проекции
правого снимка (формулы известны).
Итак, алгоритм рассматриваемого способа можно представить следующим
образом:
— Измерение
стереопары;
— Определение
элементов взаимного ориентирования;
— Вычисление углов n и t, базисных составляющих и координат центра
проекции правого снимка;
— Аналитическое трансформирование снимков стереопары относительно
плоскости Xл¢Yл¢;
— Вычисление
координат точек модели. При этом заметим, что X0=BZ, Z0=BZ , и
после трансформирования снимков X¢=xо, Y¢=yо, Z¢=-f,
поэтому, скаляр N, используемый при решении прямой пространственной
фотограмметрической засечки (при определении приращений координат точек модели)
можно вычислять по формуле:
![]()
— Все выше указанное выполняют с каждой стереопарой маршрута. Масштаб
последующей модели приводят к масштабу предыдущей с помощью масштабного
коэффициента, который определяют по расстояниям от центров проекций SП
предыдущей стереопары и SЛ — последующей до связующих
точек (точек выбранных в процессе построения и измерения модели в зоне тройного
перекрытия снимков). Обычно используют несколько расстояний, и коэффициент
вычисляют, как среднее весовое.
— Внешнее
ориентирование построенной общей для всего маршрута модели.
В способе независимых моделей модели независимы между собой. Для их
построения выбирают базисы произвольной длины, измеряют координаты
соответственных точек, включенных в сеть, вычисляют элементы взаимного
ориентирования в базисной системе координат и трансформируют снимки
относительно плоскости, перпендикулярной к главной базисной плоскости левого
снимка. В результате координаты точек модели можно вычислять по формулам
нормального случая съемки. Как видим, данный вариант не требует вычисления
элементов внешнего ориентирования снимков. Для построения общей для всего
маршрута модели выполняют операцию внешнего ориентирования второй модели по
отношению к первой, третьей по отношению к первым двум и т.д. Затем выполняют
внешнее ориентирование общей модели.
В способе связок для каждой точки, включенной в фотограмметрическую
сеть, составляются два уравнения коллинеарности (35), связывающие ее
фотокоординаты x и
y с
пространственными координатами X,Y,Z соответствующей точки местности. Каждое из
уравнений содержит 6 неизвестных, если они составлены для опознака
(неизвестными являются элементы внешнего ориентирования снимка), и 9
неизвестных для точки, пространственные координаты которой подлежат
определению. Фотокоординаты точек измеряют на всех снимках маршрута, после чего
приступают к вычислению искомых координат, действуя в последовательности
(которая уже неоднократно обсуждалась):
— Выбирают приближенные значения элементов внешнего ориентирования и
искомых координат; Их находят, используя материалы аэрофотосъемки, старые
карты, фотопланы и другие источники.
— Подставляют выбранные величины в уравнения коллинеарности. В
результате получают фотокоординаты xв, yв,
которые не будут равны измеренным и из-за погрешностей измерений и из-за
неточности принятых приближенных величин.
— Составляют уравнения поправок, коэффициенты которых будут частными
производными фотокоординат по соответствующим неизвестным. Разности между
вычисленными и измеренными фотокоординатами – их свободные члены. Перед
вычислением свободных членов в измеренные координаты вводят поправки за влияние
различных факторов. Если m – число точек в сети, n – число
снимков и k.-.число определяемых точек, то получим 2m
уравнений, с 6n+k неизвестными.
— Составляют и решают нормальные уравнения, и полученные в результате
поправки вводят в принятые значения неизвестных величин, то есть получают
второе приближение.
— Используя исправленные значения, опять составляют уравнения поправок,
затем нормальные уравнения и решают их. Таким образом, задача определения
координат точек сгущения решается методом итераций, которые прерываются, либо в
случае, когда очередные поправки окажутся пренебрежимо малы, либо по
установленному максимальному числу итераций, если решение оказывается
некорректным и нужно искать ошибки в исходных данных.
Этот способ дает возможность при построении сети
использовать зафиксированные в полете элементы внешнего ориентирования (GPS
определения, показания статоскопа, радиовысотомера и т.д.). Уравнивание, в этом
случае, выполняют с учетом весов всех измеренных величин. Следует заметить, что
он в настоящее время и наиболее популярен, так как практически нет ограничений
на использование памяти ЭВМ, что ранее было серьезной проблемой.
6.2.6.3 Понятие о блочной фототриангуляции
Так же как и в маршрутной в блочной фототриангуляции,
также могут использоваться три варианта ее построения.
Наиболее популярный из них является развитием способа
связок для маршрутной фототриангуляции. Важно только выбирать связующие точки
не только в зоне тройного перекрытия, но и в зоне поперечного перекрытия
снимков.
Второй вариант основан на построении независимых
моделей соединении их в общую для всего блока модель, для которой затем
выполняется операция внешнего ориентирования. То есть это эквивалент способа
независимых моделей маршрутной фототриангуляции.
В третьем варианте вначале создаются свободные
маршрутные сети. Затем по точкам, расположенным в зоне поперечного перекрытия
они соединяются в общую модель для блока, внешнее ориентирование которой осуществляется
с помощью опознаков.
В заключении параграфа заметим, что перед выполнением
фототриангуляции должен быть составлен проект ее выполнения, согласованный с
проектом привязки снимков. В фототриангуляционную сеть должны включаться не
только точки необходимые для внешнего ориентирования модели или
трансформирования снимков, но и связующие точки (в зоне тройного перекрытия),
характерные точки рельефа и урезы воды, если рельеф предполагается наносить
путем измерения стереопар.
6.2.6.4 Деформация модели и точность
построения фотограмметрической сети
Построить идеальную модель по паре снимков
нельзя, так как в процессе летносъемочных, геодезических и фотограмметрических
работ на положении ее точек влияет большое число различных факторов. Основными
причинами, вызывающими деформацию модели, являются:
—
Отступление изображений на
реальных снимках от центральной проекции;
—
Погрешности измерения
снимков;
—
Методические ошибки,
связанные с отступлениями от строгой теории в технологии построения модели.
Возникающие искажения могут быть случайными и
систематическими, причем последние особенно нежелательны, так как приводят к
накоплению ошибок в фотограмметрических сетях.
Из перечисленных факторов влияние многих можно
существенно ослабить путем применения более совершенной съемочной аппаратуры,
малодеформирующихся и высокочувствительных пленок, аналитических методов
обработки и т.д. Поэтому основной причиной деформации модели становятся
погрешности измерений снимков, в частности ошибки их взаимного ориентирования,
которые особенно искажают высоты точек.
Попробуем обсудить путь к оценке деформации
модели, хотя бы приближенной. Известно, что при нормальном случае съемки
![]() ,
, ![]() и
и ![]()
Продифференцируем,
например, Z по p0, в результате получим:
![]()
Выразим параллакс
через высоту фотографирования и перейдем к изображению в масштабе снимка,
тогда:
![]()
Ранее было получено,
что ![]() . Значит,
. Значит, ![]() . И, кроме того:
. И, кроме того:
 .
.
Если теперь продифференцировать трансформированные
абсциссы по a, w и k, полагая их элементами взаимного ориентирования, легко вычислить ошибки
трансформированных абсцисс, как функций погрешностей ma mw и mk (смотри
формулы 115), а значит и трансформированного продольного параллакса. Это
позволяет, в конечном итоге, оценить и ошибки координат любой точки модели.
Всю эту работу проделал А. Н. Лобанов [4]. Для точки 4
(из стандартно расположенных) он, например, получил: mY»:mX»2.5Mmq, и mz»2.3fMmq/b, где M –
знаменатель масштаба снимка. Им же была выполнена оценка накопления погрешности
в маршрутной сети из n стереопар. Рекомендуемые им формулы не
приводятся, так как подобные исследования других фотограмметристов дают
несколько иные результаты. Но важно, что, используя их, можно предрасчитать
такое расстояние (в числе базисов) между исходными опознаками, при котором
ошибки в определении координат точек не будут превосходить допусков.
Кроме того, отметим, что на практике деформацию пытаются
уменьшить на этапе внешнего ориентирования модели. Для этого используют
полиномы различной степени, например второй.

В представленной системе уравнений 15 коэффициентов. Имея не менее 5
планово-высотных опознаков, по невязкам на них можно коэффициенты вычислить, и
затем использовать для введения поправок в координаты определяемых точек.
6.2.7 Понятие о топографическом
дешифрировании снимков
Под дешифрированием понимается выявление, распознавание и определение
характеристик объектов местности, изобразившихся на фотоснимках. В зависимости
от назначения и задач, решаемых в ходе дешифрирования, различают два его вида:
топографическое и специальное.
Топографическое дешифрирование выполняют с целью выявление,
распознавание и определение характеристик объектов местности, которые должны
наноситься на план в соответствии с требованиями действующих условных знаков.
Дешифрирование снимков в процессе обследования местности в натуре называется
полевым. Распознавание на фотоизображениях объектов и контуров без обследования
их в натуре называется камеральным дешифрированием. В зависимости от
топографической изученности картографируемого района и принятой технологии
работ полевое дешифрирование проводится до камерального или после него.
Полевое дешифрирование ведут, как правило, по
маршрутам, которые намечают там, где расположены объекты, подлежащие
обязательному обследованию в натуре (поселки, мосты, ЛЭП, трубопроводы и
проч.). При этом устанавливают и подписывают названия объектов и другие их
характеристики. В процессе полевого дешифрирования следует руководствоваться
требованиями и рекомендациями инструкции [9] (пункты 12.16). Дешифрирование на
местности населенных пунктов и объектов с высокой контурной нагрузкой может
производиться на увеличенных фотоснимках, фотосхемах, фотопланах или на
аэрофотоснимках в комплекте с графическим оригиналом. Материал, на котором
фиксируются результаты дешифрирования, должен быть в масштабе составляемого
плана или близкий к нему. Данные промеров для нанесения объектов неуверенно
распознающихся на аэрофотоснимке или появившихся после залета фиксируют на его
обратной стороне или на отдельном абрисе.
Камеральное дешифрирование значительно дешевле полевого, но
для успешного его выполнения необходимо изучать дешифровочные, или, как их еще
называют, демаскирующие признаки объектов. Делятся эти признаки на прямые и
косвенные. К прямым признакам относятся: форма, размеры, тень и цвет объекта,
структура его изображения. Косвенными признаками являются: относительное расположение
объектов, следы деятельности, приуроченность, взаимосвязь и
взаимообусловленность. Основными демаскирующими признаками являются форма и
размеры изображения объектов. Плановые фотоснимки равнинной местности почти
сохраняют сходство формы изображения с натурой. Строения изображаются в виде
прямоугольников, дороги – вытянутыми линиями, извилистые линии соответствуют
ручьям или небольшим речкам. Представление о форме высокого объекта можно
получить по изображению его тени. По результатам простейших измерений и зная
параметры фотографирования (масштаб, высоту) можно определить размеры объектов
в натуре и дать соответствующую характеристику. Важными демаскирующими
признаками служат спектральная отражательная способность объекта структура его
изображения зернистая для лесов, мелкозернистая для кустарников, пятнистая для
болот, гладкая для водоемов и т.д. Косвенные признаки помогают дешифрировать
отдельные объекты, по их взаимной связи с другими объектами, изобразившимися на
фотоснимке. Типичный пример это изображение дороги, обрывающейся на одном
берегу и продолжающейся на другом (признак брода или паромной переправы).
Дорожки или тропинки, сходящиеся в одной точке, указывают на наличие колодца
или водного источника. Очень помогают при камеральном дешифрировании снимки
эталоны, которые для наиболее трудных и характерных участков получают в
процессе полевого дешифрирования.
6.2.8 Технологии, основанные на
стереообработке фотоснимков
6.2.8.1 Классификация универсальных
аналоговых стереоприборов
Эти приборы предназначены для составления
планов и карт по паре фотоснимков, а также для сгущения сети съемочного
обоснования. Они реализуют решение двойной обратной пространственной
фотограмметрической засечки.
Не смотря на то, что их век заканчивается,
приборы заслуживают внимания, так как изучение процессов обработки снимков на
них позволяет понять алгоритмы, используемые в аналитической и цифровой
фотограмметрии.
Считается, что в процессе развития средств
измерения стереопар создано два поколения универсальных аналоговых
стереофотограмметрических приборов. При конструировании приборов первого
поколения опирались в основном на достижения оптики и механики. Основными их
частями являлись моделирующая, измерительная, наблюдательная системы и
координатограф. Иногда они компоновались на одной станине. Но чаще
координатограф выпускался в качестве самостоятельного прибора, который
связывался с измерительным блоком редуктором (механического или электрического
типов). Это обеспечивало более богатый выбор соотношений между масштабами
снимков (модели) и составляемой карты.
Появление приборов второго поколения это
результат развития вычислительной техники. На направляющие устанавливались
регистраторы перемещений, что позволяло автоматизировать процесс передачи
результатов измерений в ЭВМ, а значит организовать процесс обработки пары в
режиме реального времени (в том числе и процесс построения цифровой модели
объекта). Вместо координатографов стали применять графопостроители,
использовались различного вида накопители информации и сервисные устройства.
Было создано программное обеспечение, облегчающее процесс ориентирования модели
и ее измерения. Многие комплекты обеспечивались ортофотоприставками.
По способу построения пространственной
засечки, рассматриваемые приборы можно разделить на оптические,
оптико-механические и механические. В двух последних вариантах роль
проектирующих лучей частично или полностью играют металлические стержни или
линейки (ленкеры). Причем может быть только одна их пара, и торец одного из них
моделирует положение точки местности. В этом случае 3 взаимно перпендикулярных
направляющих образуют в приборе пространственную систему координат XYZ.
Иногда используются две пары ленкеров: одна для определения только плановых
координат, вторая – для определения высот. Таким образом, пространственная
система координат образуется двумя плоскостными системами.
По точности аналоговые приборы подразделяются
на 3 класса. Если класс точности 1, то ошибки измерения координат в плоскости
снимка не превосходят 0.01мм, а пространственной координаты Z —
1/10 000 от высоты проектирования. У приборов 3 класса точности указанные
показатели соответственно равны 0.05мм и 1/2 000.
Существуют приборы, у которых плановые снимки
устанавливаются на каретки снимкодержателей горизонтально (как на
стереокомпараторе). Тогда они снабжены коррекционными приспособлениями,
позволяющие автоматически вводить поправки за наклон (выполнять
трансформирование). У большинства Западных приборов проектирующие камеры
наклоняются на углы a и w.
Засечка в приборах осуществляется по принципу
треугольника, параллелограмма или треугольник плюс параллелограмм. Что это
означает, рассмотрено ниже.
Приборы отличаются по способу наблюдения и
измерения модели. Основным является оптический способ наблюдения с помощью
бинокулярной системы. Для измерения используется мнимая марка. Реже применяются
способы анаглифов и поляроидов, а для измерения – действительная марка.
Есть приборы, на которых снимки обрабатываются
с преобразованием связок проектирующих лучей (то есть фокусные расстояния
проектирующих камер не равны фокусным расстояниям установленных на каретках
снимков).
6.2.8.2 Оптические универсальные аналоговые
стереоприборы
В таких приборах, различного класса точности и
разной конструкции, связка лучей восстанавливается, и пространственная модель
строится оптическим способом (Рис. 67). В нашей стране широкое распространение
на производстве получили двойной проектор и мультиплекс. Рассмотрим устройство
двойного проектора, так как это позволит уяснить принцип работы всех остальных
приборов.
Основными частями проектора являются
штанга 1, кронштейны 2, на которых крепятся проектирующие камеры, и планшет,
где устанавливается действительная марка с экраном E. Точки S1
и S2 (задние узловые точки объективов камер)
являются центрами проекций. Через них проходят проектирующие лучи Aa1
и Aa2. Камеры можно перемещать вдоль трех взаимно
перпендикулярных направляющих, наклонять на углы a, и w и
поворачивать в своей плоскости на угол k. Указанные движения обеспечивают построение модели.
Штангу можно перемещать относительно планшета и наклонять в трех направлениях, при этом построенная модель не
разрушается, что позволяет выполнить ее внешнее ориентирование. При
проектировании используются не аэрофотоснимки, а их уменьшенные в 3 – 4 раза копии.
При этом во столько же раз уменьшаются фокусные расстояния проектирующих камер
относительно фокусного расстояния АФА, которым производилось фотографирование.
Значит, модель строится подобными связками проектирующих лучей. Снимки через
красный и синий светофильтры проецируются на один планшет, и полученное
изображение рассматривается через анаглифические очки. В результате появляется
объемное изображение, при условии, конечно, что модель построена, а помещение
затемнено. Измерение модели осуществляется действительной маркой, расположенной
на экране E. Ее можно установить в любой точке планшета. Причем сам
экран может подниматься
и опускаться относительно планшета с помощью микрометренного винта со шкалой
для измерения высот точек. Это и позволяет совместить марку с любой точкой
модели и нанести ее на планшет.
Мультиплекс — это многокамерный проектор (до
24 камер на одной штанге), что обеспечивает построение общей модели для
маршрута.
Предположим теперь, что в приборе используется не
общий экран E, а для каждого снимка свой E1 и
E2, и что положение точки модели в пространстве
характеризуется не пересечением проектирующих лучей, а точкой пересечения
левого проектирующего луча с экраном E1. С помощью
наблюдательной системы, например, оптического типа обеспечим рассматривание
экрана E1 с маркой только левым глазом, а экрана E2
с маркой– только правым. Следствия таких конструктивных изменений:
1.
Будет наблюдаться объемное
изображение с одной мнимой маркой, стереоскопически совмещенной с точкой A
модели.
2.
Масштаб этой модели будет
определяться не отрезком S1S2, а отрезком S1S2¢.
3.
Расстояние K между
точками S1 и S2 может быть
произвольным. Оно названо постоянной прибора, и устанавливается из
конструктивных соображений. Понятно, что засечка в этом случае осуществляется
по принципу треугольник (S1S¢2E1) плюс параллелограмм (S¢2 S2E2 E1).
4.
Базис проектирования можно
устанавливать изменением положения точки E2 относительно
точки Eo (точка пересечения отрезка, проходящего через правый
центр проекции S2 параллельно левому проектирующему лучу, с
прямой E1E2). Два последних следствия оказались
столь конструктивными, что именно по этому принципу и стали строить большинство
универсальных аналоговых стереоприборов.
5.
Точку S2
можно поместить и в любое другое положение, например, переместив ее в
поперечном относительно штанги направлении, тогда образуется засечка,
построенная по принципу двух треугольников.
6.
Совместное перемещение
экранов E1
и E2 вдоль
главного луча (вдоль оси Z) без изменения расстояния между ними, будет
увеличивать или уменьшать угол засечки, а значит и взаимно перемещать снимки
(при этом, конечно, предполагается жесткая связь проектирующих лучей с экранами
и снимкодержателями). Такое движение равносильно действию винта продольных
параллаксов стереокомпаратора.
Прибор оптического типа с двумя экранами,
выпускался в Иене (ГДР) и назывался Топофлекс. Измерялись на нем не копии, а
непосредственно снимки, использовался оптический способ рассматривания
стереопары, а для измерения применялись две светящиеся марки, которые в
процессе измерений модели сливались в одно мнимое изображение. К высокоточным
приборам оптического типа относится стереопланиграф Цейса. Он был достаточно
распространен в нашей стране. Важное преимущество прибора – возможность
переключения осей визирования относительно глаз наблюдателя (то есть правым
глазом можно было рассматривать левый снимок, и наоборот), что облегчало
построение на приборе сетей фототриангуляции. Из отечественных приборов
оптического типа следует упомянуть стереоскопический рисовальный прибор
М.Д. Коншина, в котором благодаря конструкции оптической системы
обеспечивалось наложение мнимой модели на план или карту.
6.2.8.3 Универсальные приборы механического
типа
Приборам механического типа конструкторы явно отдавали
предпочтение. В них засечка осуществляется с помощью одной, а иногда двух пар
рычагов или линеек. В нашей стране выпускались и были широко распространены на
производстве стереопроектор Романовского (СПР), стереограф Дробышева (СД) и его
модификация стереограф ЦНИИГАиК (СЦ). Далее будет рассмотрен только СПР,
потому, что он составлят инструментальную базу лаборатории фотограмметрии
института, да и принципиально другие приборы от него мало чем отличаются.
СПР (Рис. 68) это прибор 1 класса
точности, предназначенный для составления топографических карт и планов по
плановым снимкам формата 18C18см и с
фокусным расстоянием 35 –350мм. Он применяется и для построения
пространственных фотограмметрических сетей. Засечка в приборе осуществляется по
принципу треугольник плюс параллелограмм. Снимки могут обрабатываться, как с
преобразованием, так и без преобразования связок проектирующих лучей, роль
которых выполняют пара металлических стержней. Они проходят через средние
карданные центры S1 и S2 (центры проекций),
вокруг которых могут вращаться, и которые жестко закреплены на каретке фокусных
расстояний. Стержни верхними карданными центрами жестко связаны с горизонтально
расположенными каретками снимкодержателей. Их нижние концы шарнирно прикреплены
к мостику отстояний.
Мостик, а значит и нижний торец левого
проектирующего рычага, моделирующий положение точки A местности, при
вращении штурвалов X и Y перемещается в горизонтальной плоскости.
В результате поворачиваются сами проектирующие рычаги вокруг центров проекций,
и по своим направляющим перемещаются снимкодержатели относительно объективов.
Вращение ножного штурвала Z вызывает взаимное перемещение
снимкодержателей (при условии, что проектирующие рычаги между собой не
параллельны). В поле зрения окуляров введены светящиеся измерительные марки,
которые в процессе указанных выше движений, можно совместить с любой парой
соответственных точек (то есть стереоскопически совместить одну мнимую
пространственную марку с любой точкой модели).
На каретке отстояниий, которая перемещается ножным
штурвалом вдоль оси Z, расположено базисное устройство моделирующей
системы с тремя суппортами для установки базисных составляющих bx,
by и bz. Перемещением каретки
фокусных расстояний можно сдвигать центры проекций S1 и S2
и, тем самым, менять фокусные расстояния проектирующих камер в пределах
150 – 300мм.
Поскольку снимки в снимкодержателях устанавливаются
горизонтально, прибор снабжен коррекционными механизмами, обеспечивающими
автоматическое введение поправок за наклон (выполняют процесс трансформирования
снимков). Каждое коррекционное приспособление решает уравнение ![]() . Причем, r0 это
. Причем, r0 это
расстояние от точки нулевых искажений c до проекции a0 точки A
местности на горизонтальном снимке; r – тоже на плановом снимке; dr – поправка за наклон. На СПР указанная поправка вводится путем
смещения на требуемую величину объектива, через который рассматривается снимок
(смотри рисунок 69) Величина смещения зависит от положений точки на снимке и
опорного пальца, который перемещается в плоскости тарелки коррекционного
механизма винтами a и w.
В соответствии с теорией,
если проектирующий рычаг занимает отвесное положение, то измерительная марка
должна быть совмещена с точкой надира. Данное условие не выполняется, так как
при установке снимков их координатные метки совмещают с рисками на стекле
снимкодержателя и марка в этом случае совмещена с центром снимка. Для
устранения указанного несоответствия методикой предусмотрено дифференциальные
смещения снимков по осям x и y. Их величины вычисляют по
формулам, которые приводятся в руководстве по эксплуатации прибора
Под направляющей X прибора расположен планшет,
на который, с помощью пишущего элемента, прикрепленного к каретке X, можно
наносить ситуацию и вычерчивать горизонтали. Величины перемещения всех кареток
определяются по соответствующим счетчикам. Причем, у каретки Z их два.
Один позволяет определять превышение между точками в миллиметрах в масштабе
модели. Второй с помощью специальных шкал и редуктора – в метрах. В принципе к
СПР может быть подключен и координатограф.
Прибор обеспечивает выбор формы и размеров марок их
цвета, а также, с помощью реостатов, степени яркости марок и освещенности
снимков.
6.2.8.4 Составление планов на СПР
В начале отметим, что нельзя вращать штурвалы и винты
прибора, если он не включен в сеть, так как в этом случае не работает
предупредительная сигнализация и возможна поломка тех или иных его узлов.
Исходными данными для составления плана являются:
-стереопара, у которой должны быть известны масштаб 1/m и фокусное расстояние снимков f;
-не менее трех опознаков (урезы воды, если в зоне перекрытия есть
водоемы);
-масштаб 1/M составляемого плана и высота сечения рельефа h;
-снимки эталоны с результатами полевого дешифрирования.
Основные процессы при обработке снимков на приборе включают:
подготовительные работы; взаимное ориентирование снимков (построение модели);
внешнее ориентирование модели; измерение модели, камеральное дешифрирование и
составление плана.
В процессе подготовительных работ на листе
высококачественной бумаге (пластика) изготовляется основа в масштабе
составляемого плана, на которую наносятся все точки геодезической сети
(опознаки), хорошо опознающиеся на снимках. На шкалах aл,
wл, aп и wп коррекционных приспособлений, dxл,
dyл, dxп и dyп
децентраций снимков bz и by базисных
составляющих устанавливаются отсчеты, равные их местам нулей, которые
определяются в процессе проверок и юстировок прибора, а на шкале базисной —
начальный отсчет b¢x. При работе
на СПР, с координатографом совмещенным с измерительным блоком прибора, масштаб
построенной модели, в конечном итоге, должен быть равен масштабу составляемого
плана. Поэтому формула для расчета имеет вид:
![]() ,
,
где b – базис
фотографирования в масштабе снимков, который легко измерить линейкой, используя
продольное перекрытие.
При установке снимков в
снимкодержателях необходимо тщательно совмещать их координатные метки с рисками
на стекле, и помнить, что диапозитивы укладываются эмульсией вверх, а негативы
– вниз.
Каретку фокусных расстояний на СПР устанавливают так,
чтобы обеспечить оптимальное перемещение каретки высот (диапазона ее
перемещений должно хватать при наведении измерительной марки, как на высоко,
так и низко расположенные точки земной поверхности).
Взаимное ориентирование снимков сводится к устранению поперечных параллаксов на шести
стандартно расположенных точках.
Пусть на рис. 70
S1
и S2
– центры проекций камер, в которые установлены снимки P1 и P2, составляющие стереопару. С помощью объективов S1 и S2 соответственные точки a1 и a2 снимков проецируются на экран Е.
Допустим, что соответственные лучи S1a1 и S2a2 пересекаются. В этом случае, опуская или
поднимая экран Е, можно установить его в такое положение, при котором
точки a¢1 и a¢2 на нем сольются в
одну (рис. 70,а). Если соответственные лучи
не пересекаются, то при любой установке экрана по высоте на нем будут
наблюдаться раздельно две точки. (рис. 70,б), и можно добиться лишь такого
положения, при котором расстояние между точками a¢1
и a¢2 окажутся наименьшим из всех возможных. Это наименьшее расстояние между
соответственными точками на экране называется поперечным параллаксом в
пространстве модели и обозначается через Q. Поперечный параллакс точки модели направлен
перпендикулярно к базису проектирования S1S2. Для плановых снимков видимый параллакс Q
определяется из выражения:
|
|
(156) |
Высота проектирования Z
зависит от длины базиса S1S2. Примем, что он равен продольному параллаксу b=p
точек а1 и а2, а высота проектирования Z
равна фокусному расстоянию f. Тогда поперечный параллакс Q,
наблюдаемый на какой–либо точке модели, будет равен соответствующему
поперечному параллаксу q на стереопаре.
Для построения модель местности по паре
снимков добиваются устранения поперечных параллаксов q в
точках ориентирования (стандартно расположенных точках, рис. 37). Делать это можно, как в базисной системе
координат, движениями обеих проектирующих камер (первый способ), так и в
системе координат одного из снимков (чаще левого), движениями только одной камеры (второй
способ).
В начале рассмотрим первый способ.
Согласно уравнению (100), можно записать:
|
|
(157) |
где x, y – координаты точки на левом снимке
стереопары.
Для установления порядка действий при
устранении поперечных параллаксов рассмотрим, как влияет каждое из движений ![]() на поперечный параллакс в каждой из стандартно расположенных точек.
на поперечный параллакс в каждой из стандартно расположенных точек.
Движение ![]() левой
левой
камеры вызывает вращение снимка, а значит и его изображения на экране вокруг
главного луча. Возникающие при этом поперечные параллаксы численно равны
четвёртому слагаемому уравнения (158):
![]()
Значит они появятся на точках 4, 2 и 6, причем будут
равны друг другу; а на точках 1, 3 и 5 параллаксы будут отсутствовать.
Поворот правой камеры на угол ![]() действует аналогично. Но формула для оценки возникающего параллакса
действует аналогично. Но формула для оценки возникающего параллакса
будет иметь вид:
![]()
Теперь на точках 4, 2, 6 он будет равен нулю, а на
точках 1, 3 и 5 некоторому значению.
Движение камеры по направлению ![]() преобразует изображение квадрата в трапецию. Возникающие при этом
преобразует изображение квадрата в трапецию. Возникающие при этом
параллаксы в точках модели можно оценить по формуле:
![]()
И видно, то в точках 1, 2, 3 и 5 они нулевые, а 4 и 6
— равны по величине и противоположны по знаку.
Аналогичным будет результат наклона и правой
камеры на угол ![]() , но формула для вычисления параллакса примет
, но формула для вычисления параллакса примет
вид:
![]()
Поворот правой камеры на угол ![]() вокруг линии базиса также преобразует квадрат в трапецию, но
вокруг линии базиса также преобразует квадрат в трапецию, но
возникающие поперечные параллаксы на стандартных точках определяются
соотношениями:
![]()
причем:
![]()
![]() .
.
Очевидно, что составляющая ![]() постоянна
постоянна
для всех точек, а величина ![]() зависит
зависит
от y.
При взаимном ориентировании снимков устранение
поперечных параллаксов на стандартных точках выполняют в такой
последовательности, чтобы последующие действия, по возможности, не нарушали
предыдущих. Поэтому, вначале поперечный параллакс устраняют на точке 1
(рис. 71), поворотом правой камеры на угол c2. Затем это делают на
точке 2, вращением левой камеры на угол c1.
Далее на точке 3 – наклоном ![]() и,
и,
наконец, на точке 4
– наклоном ![]() Нетрудно
Нетрудно
заметить, что при этом на всех точках модели будет компенсирована и
составляющая ![]() , правда, не поворотом второй камеры на угол
, правда, не поворотом второй камеры на угол ![]() , а разворотом обеих камер вокруг главных лучей, что несущественно. Но
, а разворотом обеих камер вокруг главных лучей, что несущественно. Но
поскольку наклоны на углы ![]() ,
,
как в отдельности, так и совместно, действуют иначе, чем ![]() ,
,
на точках 5 и 6 возникает новый поперечный параллакс, равный ![]() . Отношение поперечного параллакса в точках 5 (6) к поперечному
. Отношение поперечного параллакса в точках 5 (6) к поперечному
параллаксу ![]() , наблюдаемому после устранения параллаксов на
, наблюдаемому после устранения параллаксов на
точках 1-4, называется коэффициентом взаимного ориентирования. Этот коэффициент
может быть получен и по формуле:
|
|
(158) |
Используют его для введения на точке 5 нового параллакса
![]() , равного существующему значению
, равного существующему значению![]() ,
,
умноженному на коэффициент![]() (но
(но
с противоположным знаком).
Второй способ. Согласно (101)
уравнение взаимного ориентирования в этом случае имеет вид:
|
|
(159) |
где ![]() .
.
Поэтому влияния поворотов ![]() на поперечные параллаксы точек модели аналогичны влияниям
на поперечные параллаксы точек модели аналогичны влияниям
рассмотренных выше поворотов на углы ![]() .
.
Согласно уравнению (153) смещение камеры вдоль составляющей базиса by
вызывает появление параллаксов на всех точках модели, равных величине смещения.
Передвижение камеры вдоль составляющей bz влечёт за собой равномерное изменение
масштаба изображения второго снимка.
При взаимном ориентировании (рис. 72) поперечные
параллаксы устраняют сначала на точке 2 – движением by,
затем на точке 1 – движением ![]() далее
далее
на точке 4 – движением bz, и, наконец, на точке 3 – движением ![]() На точке 5, вращением правой камеры на угол
На точке 5, вращением правой камеры на угол ![]() ,
,
вводят новый параллакс, величину которого рассчитывают, как и в предыдущем
способе.
Отметим, что как в первом, так и во
втором способах действовать можно и в несколько иной последовательности.
Главное – устранить поперечные параллаксы.
Ориентирование выполняют методом
последовательных приближений до тех пор, пока остаточный поперечный параллакс на
контрольной точке не окажется меньше 0.015мм (1/4 диаметра марки наименьшего
размера). Если такого результата не достичь, вычисляют децентрации dx и dy
и на эти величины смещают снимкодержатели. Формулы для определения децентраций
приведены в паспорте прибора. После этого взаимное ориентирование повторяют.
Если при взаимном ориентировании используется второй вариант, децентрацию нужно
вводить только в один снимок, в этом его преимущество по сравнению с первым
вариантом.
Иногда при взаимном ориентировании вычисляют и
используют вспомогательный коэффициент, позволяющий уменьшить число
приближений.
Внешнее ориентирование построенной модели начинают с выбора и
установки таких шестеренок в редукторе счетчика высот и таких шкал, чтобы
отсчеты можно было брать в метрах. При этом необходимо учесть, что связки
проектирующих лучей преобразованы, то есть фокусные расстояния F¢
проектирующих камер не равны фокусным расстояниям f
снимков. Поэтому вначале вычисляют знаменатель вертикального масштаба модели M¢в (из-за преобразования связок он не равен
знаменателю горизонтального масштаба M). Очевидно M¢в=Mf/F¢. Полученная величина является входом в таблицу
установок шкал и шестерен, которая имеется в инструкции по эксплуатации
прибора. Из этой таблицы выбирают окончательное значение Mв вертикального масштаба (наиболее близкое к
вычисленному), а также ему соответствующие шкалу и пару шестерен, которые и
устанавливают на каретке высот. В заключении следует пересчитать фокусное
расстояние проектирующих камер и установить его на шкале каретки фокусных
расстояний.
Сам процесс внешнего ориентирования делится на два этапа.
Первый этап называется масштабированием модели. Его осуществляют изменением
базисной составляющей bx во столько раз, во сколько отрезок lo между парой
опознаков на основе отличается от соответствующего ему отрезка lм на бумаге,
нанесенного по результатам измерения модели, т.е. новое значение bx= lo b¢x/ lм. Возникший
при этом поперечный параллакс в центре модели и на одном из верхних ее краев
устраняется соответственно винтами by и bz. После операции ориентирования полезно установить на
планшет (координатограф) основу, отцентрировать ее и сориентировать. Для
центрирования измерительная марка стереоскопически совмещается с одним из
опознаков, а острие пишущего элемента (карандаша) с соответствующей точкой на
основе. Затем марку совмещают с другим опознаком и основу вращают вокруг
первого до тех пор, пока острие карандаша не окажется над второй точкой.
Операции центрирования и ориентирования выполняют методом последовательных
приближений, а результат контролируют по невязкам на опознаках, которые в них
не участвовали.
Второй этап внешнего ориентирования называется
горизонтированием. Его цель поворотом модели добиться того, чтобы при
стереоскопическом совмещении измерительной марки с любым опознаком отсчет на
счетчике высот был равен их высотам. Поворот вначале осуществляют в поперечном
направлении одновременным вращением винтов w коррекционных механизмов левого и правого снимков. Делается это, например,
так (Рис. 73). Измерительная марка стереоскопически совмещается с опознаком I,
а на счетчике высот устанавливается отсчет, равный высоте этого опознака. Затем
измерительная марка совмещается с опознаком II, берется отсчет по счетчику
высот и на счетчике ножным диском устанавливается среднее между высотой второго
опознака и полученным отсчетом. И, наконец, измерительную марку вновь совмещают с
опознаком, совместным вращением винтов w коррекционных механизмов левого и правого снимков.
При этом следят, чтобы не возникал поперечный параллакс. Указанные действия на
первых двух опознаках выполняют последовательными приближениями до тех пор,
пока разности между отсчетами по счетчику высот, полученными при
стереоскопическом наведении марки и исходными высотами не окажутся меньше
инструктивных допусков (например, одной трети от принятой высоты сечения
рельефа).
Закончив
горизонтирование в поперечном направлении, ножным диском на счетчике высот
устанавливают отсчет, равный исходной высоте опознака III. К нему штурвалами X
и Y перемещают и измерительную марку. Стереоскопически ее совмещают
с опознаком вращением винта aл, а возникающий поперечный параллакс устраняют винтом bz.
После этого следует вернуться к одному из первых опознаков и устранить
возникший там поперечный параллакс винтом aп. При
необходимости указанные операции на всех опознаках повторяют. Если же допуск
выдерживается, вновь вычисляют и вводят децентрации, теперь уже и левого и
правого снимков, уточняют взаимное ориентирование и горизонтирование. Так
действуют до тех пор, пока, вычисленные после очередного горизонтирования,
децентрации не станут меньше погрешностей их установки на приборе.
Измерение модели и составление плана осуществляется
после центрирования, ориентирования и закрепления основы на столе
координатографа. При нанесении ситуации пишущий элемент с помощью ножного
пульта опущен и касается основы, а движение измерительной марки по контуру
осуществляется штурвалами X, Y и ножным диском. Штурвалы имеют
переключатели для регулирования скорости движения. Некоторые контура (например,
дороги, строения, столбы линий связи и т.д.) целесообразнее отображать на
планшете нанесением отдельных пикетов. Распознавание объектов производится
путем анализа прямых и косвенных признаков и снимков эталонов.
Для вычерчивания горизонтали, на счетчике ножным
штурвалом устанавливают ее высоту, вращением штурвалов X и Y
находят точку, где измерительная марка касается поверхности модели, опускают
пишущий элемент и этими же штурвалами ведут марку по поверхности модели.
Следует отметить, что чем ярче выражен рельеф, тем легче его отображать на
планшете (наносить горизонтали).
6.2.8.5 Другие приборы механического типа
Стереоавтограф (Рис. 74) был создан специально для обработки
наземных фотоснимков формата 13х18 см, полученных при нормальном и
равноотклоненном случаях съемки. На нем следует немного остановиться потому,
что прибор широко использовался в нашей стране при составлении маркшейдерских
планов открытых горных выработок (карьеров). Его особенность в том, что
используются две пары ленкеров: нижняя L1 и L2 решает задачу определения только плановых
координат X и
Y точек модели, верхняя (на рисунке показана только
левая высотная линейка L1¢) —
их высоты Z. Таким образом, пространственная система координат
образуется двумя плоскостными системами.
Мостик отстояний прибора может перемещаться вдоль
направляющей Y на расстояния от 50 до 400 мм.
То, что моделирующая система решает уравнения прямой
пространственной фотограмметрической засечки именно для равноотклоненного
случая съемки, легко получить из схемы прибора, которая приведена на рисунке.
Действительно, пространственное положение точки местности моделируется в
приборе точками A в плане и A¢ по высоте. Из подобия двух правых треугольников:
![]()
Но, как видно из схемы, E1E2=byx2/f и E1E0=bx, поэтому:
![]()
Из рисунка, кроме того, следует, что X=Yx1/f и Z=Yz1/f . Формула для аппликаты получена из подобия
треугольников, образованных левой высотной линейкой L¢,
изогнутой в точке S1 под прямым углом. Полученные соотношения, таким
образом, действительно соответствуют уравнениям (131-132).
Точно такие же уравнения решает аналоговое устройство
другого прибора для составления планов по наземным снимкам — технокарта.
Следует отметить, что при обработке фототеодолитных
снимков взаимное ориентирование не выполняется совсем, так как считается, что
элементы внешнего ориентирования в процессе фотографирования устанавливаются с
достаточной точностью, и поперечный параллакс отсутствует. Кроме того,
несколько иначе осуществляется и внешнее ориентирование модели. Практически оно
сводится к процессу центрирования и ориентирования основы на столе
координатографа и устранения затем невязок на корректурных точках. В приборах предусмотрен
учет угла конвергенции, если этот угол невелик (первые градусы).
Фирма Оптон выпускала серию приборов Планимат механического
типа 1 класса точности. Модель D2 предназначалась для обработки как аэро, так
и наземных снимков. Ее особенность – возможность установки карданных центров,
вокруг которых вращаются проектирующие рычаги, как над снимкодержателями, так и
под ними, что существенно расширяет диапазон отстояний.
В Швейцарии наиболее известными производителями
стереофотограмметрических приборов являются фирм Kern и Wild. Первая из них
производила серию приборов PG. Вторая модель, например, предназначалась для
составления карт в средних и мелких масштабах и имела ортофотоприставку. Третья
модель использовалась в крупномасштабном картографировании. Фирма Wild
известна своими автографами: A7 – A10 и B8S. Все это приборы 1 класса точности
механического типа. В комплект автографа A8 входила ортофотоприставка, A7 –
позволял обрабатывать и фототеодолитные снимки, A9 – сконструирован
специально для составления карт по аэрофотоснимкам, полученным широкоугольными
АФА. Для картографирования в мелких масщтабах фирмой выпускался Aviograph.
Кроме того, известны приборы Aviomap (AM, AMM и AMU).
В Италии разработкой и изготовлением
фотограмметрических приборов в основном занималась фирма GALILEO.
Известны Stereosimpleks – прибор механического типа 2 класса точности
(он выпускался в различных модификациях), и Stereomecometr – для составления карт среднего масштаба.
Фирмой Нистри выпускался Стереокартограф, неплохой прибор 1 класса точности,
предназначенный для обработки аэро и наземных снимков, в том числе и
широкоформатных.
Достаточно хорошо известны: Стереотопограф
Пуавулье (Франция) и прибор Томпсона (Англия).
6.2.8.6
Ортофототрансформирование
Как
ранее отмечалось, трансформирование снимков холмистой и горной местности
следует выполнять по зонам для того, чтобы смещение точек за рельеф довести до
приемлемых величин. Однако при большом числе зон этот путь снижает точность
создаваемых карт и увеличивает их стоимость. Более эффективный вариант –
ортофототрансформирование, в результате которого получают фотографическое
изображение местности в ортогональной проекции. Называют такое изображение
ортофотоснимком.
Идея метода в том, что если взять не
весь фотоснимок, а только небольшую его часть, то в ее пределах смещения и за
наклон и за рельеф для всех точек будут примерно одинаковыми. Иначе,
искажениями можно пренебречь и считать, что там и масштаб постоянный и
изображение подобно плану. Конечно, у каждого такого элементарного участка на
снимке будет свой масштаб. Значит суть ортофототрансформирования в том, чтобы
снимок разбить на элементарные участки, привести их к одному масштабу и
составить из них единое изображение. Для того, чтобы это осуществить нужны углы
наклона главного луча и информация о рельефе местности, которая изображена на
фотоснимке. Все это есть после построения модели, например, на аналоговом
приборе, поэтому для них были сконструированы ортопроекторы (ортоприставки).
На рис. 75 приведена схема
ортофототрансформирования с помощью аналогового прибора. На нем изображены:
построенная по паре снимков модель рельефа (точки A и B принадлежат
этой модели); один из снимков пары P;
плоскость T трансформирования, куда спроектированы точки модели; экран E,
на котором строится ортофотоизображение.
Из рисунка следует, что для того
чтобы на экране изобразилась ортогональная проекция окрестности точки A
(ограничена вертикальными штришками) в заданном масштабе, его нужно опустить в
положение E1, а для изображения указанной проекции точки B
наоборот поднять в положение En. Обеспечить такое
перемещение экрана (или что все равно проектирующей камеры ортопроектора, где
расположена копия трансформируемого снимка) можно связав его каретку
(электрически или механически) с кареткой мостика отстояний стереоприбора.
Тогда совмещение оператором измерительной марки с точкой модели автоматически
приведет к установке экрана (или проектирующей камеры ортопроектора) в нужное
положение. Для того чтобы зафиксировать ортогональную проекцию окрестности
точки построенную на экране, изображение снимка в ортопроекторе проектируется
через щель на светочуствительный слой фотопленки. Размер щели подбирается так,
чтобы искажения на ее краях вызванные наклоном трансформируемого снимка и
рельефом местности не превышали установленных допусков.
Общее
изображение на экране получается путем сканирования установленного в
ортопроекторе снимка (положения 1, 2 …n на рис 75) параллельными маршрутами,
расстояние между осями которых равны длине щели. Направление движения может
быть принято по оси X или Y в зависимости от направления скатов
на местности. Оператор при движении марки совмещает ее с поверхностью модели,
устанавливая тем самым экран ортопроектора. в нужное положение. Во время
сканирования изображение снимка проектируется через щель на светочувствительный
материал, в результате чего фиксируется изображение в виде полоски. Затем
фиксируется следующая полоска и т.д.
Сканирование
одной модели позволяет получать ортофотоизображение только части снимка,
расположенной в зоне продольного перекрытия. Чтобы трансформировать снимок
полностью следует построить следующую модель.
6.2.8.7 Автоматизация обработки снимков на
фотограмметрическом оборудовании
Уже в семидесятых годах двадцатого столетия
стало очевидным, что от графических продуктов (планов и карт), которые получают
в процессе съемок нужно переходить к их цифровым аналогам. Связано это было с
бурным развитием вычислительной техники, увеличением ее мощности и
быстродействия. В результате появилась реальная возможность заменить в качестве
носителей информации картографические материалы на цифровые модели объектов. На
основе таких моделей автоматизация решения различных прикладных задач, в том числе
и проектирования, а также составления необходимых графических документов
становилась делом техники.
Получить цифровые модели можно, например,
путем цифрования карт и планов. Но гораздо производительнее совместить их
построение с процессом съемки (с процессами выполнения линейно-угловых
измерений в тахеометрии или обработки снимков в фотограмметрии). В
тахеометрической съемке это привело к появлению полевых регистраторов
информации, а затем и электронных тахеометров, исключивших ручной ввод данных
из журналов в компьютер. В фотограмметрии было создано второе поколение
универсальных аналоговых стереофотограмметрических приборов. Они были
обеспечены аналого-цифровыми преобразователями, пакетами прикладных программ,
обеспечившими автоматизацию процессов внешнего ориентирования модели,
построенной на приборе, регистрацию результатов измерения снимков и построения
цифровых моделей. Иногда такое сочетание аналоговых приборов со средствами
автоматизации называют гибридными системами
Когда речь идет об автоматизации обработки
снимков, то предполагается, что автоматизированными должны быть следующие
процессы решения двойной обратной пространственной засеки:
1.
Внутреннее ориентирование
снимков;
2.
Построение
фотограмметрической модели (взаимное ориентирование снимков);
3.
Внешнее ориентирование
модели по опознакам;
4.
Съемка ситуации и рельефа.
При этом на всех этапах должна быть обеспечена автоматическая
регистрация измерений снимков и программная поддержка построения цифровой
модели на ПЭВМ. Для реализации процесса автоматизированной обработки необходимы
аппаратные и программные средства. Аппаратные средства, как правило, включают:
—
Компьютер типа IBM PC или
совместимый с ним. Требования к его техническим характеристики во многом
зависят от объема обрабатываемых данных. Но лучше, если это Pentium
современной конфигурации.
—
Мониторы цветные лучше SVGA от
800Х600 пикселов с размером экрана по диагонали 17 дюймов или больше, (но
допустимо и меньше).
—
Графопостроитель рулонный
перьевой формата АО, с количеством перьев не менее 4.
—
Принтер, лучше лазерный.
—
Дискеты и расходные
материалы в необходимом количестве.
Автоматическая регистрация измерений обеспечивается
сопряжением стереоприборов для обработки снимков с ПЭВМ. При использовании
аналогового фотограмметрического прибора механического типа на его ходовые
винты устанавливают инкрементальные (дифференциальные) датчики типа «угол-код».
Они преобразуют механические перемещения кареток прибора в электрические
импульсы (т.е. при вращении винтов вырабатываются электрические импульсы). Чтение
импульсов, их суммирование, контроль и регистрацию в ПЭВМ выполняются с помощью
интерфейсного устройства (коордиметр, блок Marcgraf, ZIF и др.). В результате и получается так
называемая гибридная система. Для того, чтобы регистрация осуществлялась не в
импульсах, а в миллиметрах, перед началом измерений необходимо определить цену
импульса, используя для этого, например, результаты измерения сетки Готье.
Что касается программного обеспечения, то в нашей
стране разработано несколько пакетов, обеспечивающих и решение двойной обратной
пространственной засечки, и построение цифровой модели объекта, при чем как по
результатам аэрофотосъемки, так и по результатам наземной
стереофотограмметрической съемки. Из них заслуживает внимание, например,
программный комплекс «Карьер», разработанный в фотограмметрической лаборатории
ВНИМИ. Это специализированный пакет для обработки материалов
фотограмметрической и тахеометрической съемок карьеров. Но его можно
использовать и при решении ряда задач инженерной фотограмметрии.
Достоинство пакета в том, что в процесс обработки
наземных снимков включен этап корректирования фотограмметрической модели,
позволяющий существенно ее улучшить, уменьшить невязки на опознаках и в итоги
повысить точность конечного продукта. Для этого геодезические координаты
опознаков преобразуются в фотограмметрическую систему координат. Разности между
перевычисленными координатами опознаков и координатами полученными в процессе
измерения не откорректированной модели (невязки в фотограмметрической системе
координат), позволяют понять природу их возникновения и принять обоснованные
решения по их устранению.
В основу автоматизированного корректирования
фотограмметрической модели положен хорошо известный приближенный метод
основанный на раздельном устранении невязок вначале по оси YФ, а затем XФ и ZФ.
Программа предусматривает два метода выполнения этой операции: автоматический и
ручной. Первый вариант является основным. Для его выполнения необходимо
обеспечить стереопару как минимум тремя опознаками. Максимальное их число – 20,
но три из них должны иметь, так называемое, стандартное расположение: все на
дальнем плане, точка 1 вблизи главного луча правого снимка, точки 2 и 3 –
соответственно у левой и правой границы стереопары. Ручное корректирование
всегда выполняется по трем стандартно расположенным точкам, в случае если в
процессе обработки предполагается рисовка горизонталей, а также для устранения
больших невязок (более 10 м) перед автоматической корректурой.
В целом автоматизированная обработка снимков при
наземной стереофотограмметрической съемке включает в себя следующие этапы:
1.
Подготовительные работы;
2.
Корректирование
фотограмметрической модели;
3.
Геодезическое
ориентирование фотограмметрической модели (ее внешнее ориентирование);
4.
Сгущение съемочного обоснования
и фотограмметрическую съемку объекта.
Подготовительные работы заключаются в создании
каталогов координат опознаков и базисов фотографирования, а также
предварительном построении фотограмметрической модели на приборе. На экране
монитора указывают имя стереопары, и заполняют таблицу с параметрами
фотографирования. На отсчетных устройствах обрабатывающего прибора
устанавливают значения данных из таблицы и согласовывают начальные отсчеты
интерфейсного устройства с началом фотограмметрических координат прибора.
Геодезическое ориентирование осуществляется после
корректирования модели простым переходом в соответствующий режим. После
завершения ориентирования, на экране монитора можно получить протокол обработки
стереопары. В нем будут отражены параметрами фотографирования и невязками в
фотограмметрической и геодезической системах координат. Если они удовлетворяют
требованиям технической инструкции, работа продолжается либо в режиме
фотограмметрического сгущения сети либо в режиме фотограмметрической съемки.
В процессе съемки на экран монитора выдаются:
положение измерительной марки прибора и ее геодезические координаты,
редактируемая линия в белом цвете, нанесенные уже контура и элементы местности
в розовом цвете, изображение цифровой модели, если она существует, в голубом
цвете. Указанное изображение можно перемещать, выполнять его центровку и
масштабировать. Регистрацию пикетов можно осуществлять в ручном и
автоматическом режимах. Можно задавать тип регистрируемых линий, и если
необходимо, их направление и т.д.
В программе предусмотрены операции склеивания и
фильтрации информации. Склеивание это логическая операция, в результате которой
два элемента имеющие одинаковую часть заменяются одним элементом. Она
обеспечивает объединение одноименных структурных элементов объекта,
расположенных в зоне перекрытия съемки соседних стереопар; съемки, выполненной
с различных базисов, а также при пополнении цифровой модели объекта. Эта
операция осуществляется автоматически, если расхождение в положении точек
перекрывающихся объектов не превосходит допусков.
Фильтрация это операция автоматического удаления
избыточной информации. Параметрами фильтрации являются: минимальное и
максимальное расстояние между пикетами и допустимое расстояние между
исключаемой точкой и прямой проходящей через два смежных с ним пикетов. Следует
заметить, что на производстве стремятся экспортировать результаты
автоматизированной обработки в более развитые программные продукты, оперирующие
с векторными данными, например в Автокад.
6.2.8.8 Понятие об универсальных
стереоприборах аналитического типа
Как уже отмечалось, создание
аналитических универсальных стереоприборов связано, прежде всего, с успехами в
развитии электронно-вычислительной техники. Это фактически фотограмметрический
комплекс, основными частями которого являются: высокоточный прибор для
измерения снимков (то есть той или иной конструкции стереокомпаратор),
быстродействующая управляющая ПЭВМ, графопостроитель, программное обеспечение и
различные сервисные устройства.
Измерительный прибор связан с ПЭВМ с помощью датчиков
и аналого-цифровых преобразователей. Важная особенность – существование между
ними обратной связи, необходимой для дифференциальных перемещений снимков с
целью устранения поперечных параллаксов. Осуществляются эти перемещения
приводными двигателями, которые и управляются ПЭВМ. Программное обеспечение
должно включать фотограмметрические модули для внутреннего и взаимного
ориентирования снимков, внешнего ориентирование модели, а также пакеты,
обеспечивающие регистрацию координат в процессе измерений модели, поддержку
файлов данных (например, каталога координат, цифровой модели местности и
рельефа и т.д.), пакет прикладных программ. Хорошо, когда программное
обеспечение открыто для программ пользователя. Следует отметить, что приборы
аналитического типа обеспечивают наивысшую точность картографирования по
снимкам, так как для измерений используются высокоточные стереокомпараторы, и
нет ограничений на учет факторов, которые приводят к искажениям изображений.
Важно, чтобы их влияние было записано аналитически.
Основные процессы при обработке снимков:
— Загрузка исходных данных в ПЭВМ и установка снимков на каретках
снимкодержателей;
— Внутреннее ориентирование, которое сводится к выполнению измерений на
координатных метках или на крестах, если впечатана сетка. Результат –
параметры, позволяющие пересчитывать фиксируемые в процессе измерений отсчеты в
фотокоординаты;
— Взаимное ориентированиек снимков. Оно заключается в измерении
координат не менее чем на 5 соответственных точках. На самом деле точек берут
больше, и их расположение не обязательно должно быть стандартным. Результат –
элементы взаимного ориентирования, используемые для вычисления смещений
снимков, осуществляемых приводными двигателями. Если ориентирование выполнено
корректно, то поперечный параллакс будет отсутствовать при наведении на любую
пару соответственных точек (то есть будет построена модель);
— Внешнее ориентирование модели состоит в измерении координат опознаков
и вычислении матрицы преобразования. Важной характеристикой качества
построенной модели и результатов внешнего ориентирования являются остаточный
поперечный параллакс и невязки на опознаках.
— Измерение модели и составление плана начинают после согласования
систем координат модели и основы распложенной на столе графопостроителя.
Перед выполнением того или иного процесса с помощью меню в
оперативную память ПЭВМ загружается соответствующий пакет. На современных ПЭВМ
возможна и параллельная обработка результатов измерений (например, составление
плана и создание цифровой модели).
Изготовителей аналитических приборов рассматриваемого типа
много. Отмечается тенденция к производству недорогих систем по возможности
полностью интегрированных в Географическую информационную систему (ГИС). Почти
в каждой модели реализовано оптическое наложение данных, то есть, возможно
совмещение стереомодели с твердой копией.
Из аналитических приборов особенно хорошо известны
Планикомпы фирмы Оптон (Германия). Существуют две их серии: C100, C110, C120, C130 и C140, а
также P1, P2 и P3. Вторая серия имеет комплексное
математическое обеспечение PHOCUC. Оно обеспечивает фототриангулирование по
способу связок, построение ЦМР при различных вариантах выбора точек, выполнение
операций картосоставления в режимах on line и off line, формирование базы
данных ГИС с объектно-ориентированной структурой, позволяющей осуществлять
анализ данных по тематическим критериям, выполнять обработку наземных и
спутниковых снимков.
Известны серия приборов DSR Фирма Kern (Швейцария), приборы:Wild BC3, APY, S9-AP, RAP (Wild
Швейцария), SD2000 (Leika Швейцария), Дигикарт 40 (Италия) и т.д.
В приборе TRASTER фирмы MATRA (Франция) снимки проецируются на один экран в
поляризованном свете, что позволяет через очки наблюдать модель сразу
нескольким специалистам.
Класс малогабаритных приборов упрощенной конструкции
производился Австралийской фирмой ADAM Technologi, это G2, G3 –стереокорды, G3/PC? ASP –
2000.
В нашей стране был сконструирован и используется на
производстве прибор аналитического тип Анаграф.
6.2.9 Особенности
цифрового трансформирования и составления фотоплана
(Михайлов А.П.)
6.2.9.1 Назначение
и области применения цифрового трансформирования снимков
Трансформированием снимков может выполняться и
цифровыми методами. Основными областями его применения являются топография и
картография.
При создании и обновлении карт различного назначения
по аэрокосмическим снимкам создаются трансформированные изображения местности в
проекции карты. Эти изображения могут быть созданы по одиночным снимкам или по
нескольким перекрывающимся снимкам. Цифровое трансформирование выполняется с
точностью, соответствующей точности предъявляемой действующими нормативными
документами к точности карт соответствующего масштаба.
Цифровые трансформированные изображения используют для
создания контурной части карт, путем векторизации цифровых изображений в среде CAD или
ГИС, а также как самостоятельные картографические документы. В частном случае,
если при трансформировании снимков не учитываются влияние кривизны Земли и
проекция карты на положение контуров, трансформированное изображение
представляет собой ортогональную проекцию местности на горизонтальную
плоскость. Такой вид трансформирования называется ортотрансформированием.
Помимо топографии и картографии, цифровое
трансформирование используется для создания по исходным снимкам перспективных
изображений местности из заданных точек пространства. Такие изображения
используют в военной области, например, в летных тренажерах и в архитектуре —
при проектировании различных сооружений. Применяется оно также для
преобразования стереопар исходных снимков в стереопару снимков идеального
случая съемки в системе координат фотограмметрической модели. Такое
преобразование выполняется в цифровых стереофотограмметрических системах.
Процесс цифрового трансформирования состоит из
двух этапов. На первом этапе процедура геометрического трансформирования
создает «бланк» подходящего размера и устанавливает масштаб (размер пиксела).
На втором — определяются пиксельные значение (плотности) каждого пиксела трансформированного
изображения. С этой целью, изменяются параметры геометрического
трансформирования каждого выводимого пиксела, для того чтобы определить его
положение в системе координат строк и столбцов исходного растрового
изображения.
Принципиальная схема цифрового
ортотрансформированния снимков представлена на рис.76. Исходными материалами
при цифровом ортотрансформировании снимков служат: цифровое изображение
исходного фотоснимка; цифровая модель рельефа (в большинстве случаев
используется регулярная сетка ЦМР в виде сетки квадратов на местности);
элементы внутреннего и внешнего ориентирования снимка; параметры внутреннего
ориентирования снимка в системе координат цифрового изображения.
Основными процессами ортотрансформирования
являются:
—
Формирование «бланка».
—
Определение плановых
геодезических координат центров каждого пиксела «бланка».
—
Вычисление высоты каждого
центра.
—
Вычисление координат
изображений центров в плоской прямоугольной системе координат исходного снимка.
—
Преобразование их в
систему координат цифрового изображения.
—
Вычисление оптических
плотностей пикселов «бланка».

Рис.76
«Бланк» — прямоугольная матрица цифрового
ортоснимка, строки и столбцы которой параллельны осям X и Y
геодезической системы координат. Координаты одного из ее углов заданы в этой же
системе координат. Размер элементов (пикселов) матрицы обычно принимается
равным приближенной величине D×m, в
которой:
— D — размер пиксела цифрового изображения
исходного снимка;
— m — знаменатель среднего масштаба снимка.
Значения координат угла создаваемой матрицы выбирают кратными величине
ее элементов.
По значениям индексов i и j
элементов матрицы a*ij определяют
координаты X, Y центра соответствующего пиксела цифрового
ортоснимка в геодезической системе координат. Значения Zi
находят методом билинейного
иинтерполирования.

Рис.77
На рис.77 DX = Xi —
X1,
а DY= Yi
— Y1, где X1 и Y1
— координаты узла 1 цифровой модели рельефа. Высоту точки Zi вычисляют по формуле:
|
|
(160) |
в которой:
![]() ,
, ![]()
По координатам Xi, Yi, Zi и значениям элементов внутреннего и внешнего ориентирования снимка
определяют координаты х,у соответствующей точки на исходном цифровом снимке в
системе координат снимка Sхуz. При этом:
|
|
(161) |
где:
 .
.
По координатам х,у и значениям параметров внутреннего
ориентирования цифрового изображения вычисляют координаты точки снимка в
системе координат цифрового изображения осхсус.
В случае использования аффинных преобразований при выполнении внутреннего
ориентирования, для этого используют формулы:

Затем по координатам хc и
уc вычисляют пиксельные координаты точки:
xp = xc/D, yp = yc/D.
Используя xp,yp точки цифрового изображения снимка,
являющейся проекцией центра пиксела матрицы цифрового ортоснимка, находят
ближайшие к этой точке четыре пиксела цифрового изображения снимка. Далее,
методом билинейной интерполяции по формулам (8)
определяют значение оптической плотности Di или цвета, присваиваемого соответствующему
пикселу матрицы цифрового ортоснимка. При этом значение величин Dхp, Dyp определяют по формулам:
Dxp = xpi – xpk, Dyp = ypi – ypk.
Таким же образом определяются оптические
плотности и цвет всех остальных пикселов цифрового ортоснимка.
В Талке
задача получения трансформированного изображения решается несколько иначе. В
программе есть разделе «параметры расчета фотоплана», в котором
предлагается задать параметр, «точность преобразования», Этот параметр
определяет число трансформационных зон, на которое делится снимок. Причем, по
умолчанию он равен 128x128. Это означает, что каждый фотоснимок
разбивается 128 вертикальными и 128 горизонтальными полосами на 16384 зон, в
каждой из которых используется свой закон преобразования снимка при создании
фотоплана. На самом деле зон даже несколько больше, поскольку каждая
определяемая точка, поставленная оператором, участвует в разбиении на зоны как
вершина. Сводка на границах зон гарантируется, поэтому увеличение их числа
грозит только увеличением времени расчетов и тем, что увеличение параметра
«точность преобразования» ведет к существенному расширению используемого для промежуточных
расчетов дискового пространства. В точки каждой зоны снимка можно ввести
поправки за искажения на снимке, за наклон оптической оси и за
рельеф, для чего используются задачи: «ошибки снимка», «рельеф
местности» и «наклон оптической оси»».
Указанный выше учет следует выполнять по мере
надобности. Так, например, «рельеф местности» следует учитывать только, если
проводился расчет рельефа для каждой стереопары, выполнялась блочная
фототриангуляция и создавалась единая ЦМР (либо для расчетов использовали ЦМР,
созданную по картографической информации).
Аналогично, «ошибки снимка» следует включать, если был
проведен расчет в задаче «ошибки снимка». Задача «наклон оптической оси»
выполняется, если проводилась блочная фототриангуляция, но рельеф местности не
строился и не использовался для расчетов (технология построения фотопланов для
равнинных местностей). При расчетах смещения точек снимка из-за влияния рельефа
наклон оси и так учитывается, поэтому задачу «наклон оси» выполнять не следует.
Отметим, что в программе оператору
предлагается выбор конечной продукции между «фотосхемой», «фотопланом» и
«ортофотопланом». Он тесно связан с только что рассмотренными параметрами. Так,
выбор «фотосхемы» автоматически означает отключение задач учета рельефа и
наклона оси. Выбор «фотоплан» означает учет наклона оси, а выбор «ортофотоплан»
равносилен автоматическому включении задачи по учету рельефа.
В программе предлагается довольно богатый выбор
значений параметра «точность преобразования», (от 2х2 до 1024х1024). В
горных районах и для снимков мелкого масштаба, возможно, следует устанавливать
параметры более 128, например, 512. Для равнинных местностей и для снимков
крупного масштаба можно уменьшить число зон до 32х32.
Для
задачи «ошибки снимка» никогда не бывает нужно значение больше, чем 128. Для
задачи «смещение за рельеф» желательно, чтобы значение параметра «точность
преобразования» было не меньше, чем отношение (размер снимка на местности в
метрах)/(шаг матрицы единой ЦМР), т.е. чем число пикселей единой ЦМР, лежащих
на стороне снимка. Обычно 128 бывает достаточно. Расчет «ошибок снимка» с одним
значением параметра, а «геометрии» с другим, является допустимым и не приводит
к ошибке. В то же время не стоит при расчете геометрии брать значение параметра
«точность преобразования» меньше, чем при расчете смещения за рельеф: это будет
означать, что при расчете смещения за рельеф записана лишняя информация,
которая потом не используется. Аналогично, если в задаче «смещение за рельеф»
точность преобразования меньше, чем число пикселей единой ЦМР, лежащих на
стороне снимка, то это значит, что создана излишне подробная единая ЦМР.
Как указывалось выше, ортофотоснимок это
растровое фотоизображение, полученное на основе одного из исходных изображений
стереопары путем его трансформирования в ортогональную проекцию. Делают это
только после построения единой ЦМР (пространственной сети TIN). Поэтому задача
«Смещение за рельеф», например в Талке, обязательно выполняется для каждого
фотоснимка проекта, который участвует в создании ортофотоплана, если
создавалась ЦМР и есть желание учесть смешение точек фотоснимка из-за влияния
рельефа при создании фотоплана. Смещения точек фотоснимка из-за влияния рельефа
хранятся в виде сетки трансформационных зон во внутреннем формате программы. Ее
размерность устанавливается по значению параметра «Задача»/«Фотоплан»/
«Параметры процесса построения фотоплана»/«Точность преобразования».
Не следует забывать, при создании фотоплана, поставить флаг «Учитывать
искажения за рельеф» для использования этой сетки. При ее вызове на экран
дисплея появляется примерно такая картинка (Рис. 78). Если сетка смещений за
рельеф очень сильно искривлена или растянута в каком-то месте, то обычно это
означает, что в единой ЦМР присутствуют ошибки («ступенька» или «выброс»). Появление
сообщения об ошибке обычно означает, что «модель рельефа не может быть
однозначно спроектирована на плоскость данного снимка». Это бывает, например,
когда на ЦМР есть настолько крутые склоны или глубокие овраги, что они не видны
на снимке. Такие явления обычны и при плохом качестве (грубых ошибках) ЦМР
стереопар, по которым строилась единая ЦМР.
В
некоторых экзотических случаях, при крупномасштабной съемке и большой площади
залета, возможна ситуация, когда из-за наклона плоскости снимка часть ЦМР оказывается
«за спиной». Это тоже приводит к ошибке. В этом случае остается только создать
несколько ЦМР с рамками меньшего размера, и рассчитывать смещения за рельеф для
части снимков по одной, а для другой части снимков – по другой ЦМР.
При фотографировании местности, на
которой расположены высокие объекты (например, здания) возникает задача «Сдвиг
объектов». Если ее не решать, то на фотоплане, рассчитанном программой, крыша
дома будет смещена по отношению к основанию. В этом случае и ортофотоплан нельзя
считать строгим. Для решения задачи те крыши домов, которые предполагается
смещать должны быть соответствующим образом помечены. После ее решения они
будут смещены на их основания в соответствии с рельефом. Образовавшиеся
«мертвые зоны» (области, которые не были видны на том снимке, с которого дом
был взят на исходный фотоплан) будут заполнены с других снимков проекта.
6.2.9.2 Создание цифровых фотопланов
(Михайлов)
Цифровые фотопланы могут быть созданы по
перекрывающимся цифровым трансформированным снимкам. На рис.79 представлен
принцип формирования цифрового фотоплана. Для его создания используются
трансформированные снимки с одинаковым размером пикселов и имеющие координаты
начал систем координат цифровых изображений O1 и O2
кратные размеру пиксела.
При создании цифрового фотоплана в зоне
перекрытия трансформированных снимков проводят линию пореза в виде полилинии с
узлами Ki. Затем, с ее помощью в каждой строке определяют
граничные пикселы, совмещенные с линией пореза, и приступают к формированию
матрицы цифрового фотоплана.
Координаты начала системы координат цифрового
фотоплана XOM принимаются равными наименьшему значению
координат XO1 и XO2 начал систем координат цифровых трансформированных снимков, а YOM – наибольшему значению координат YO1 и YO2 .
Каждая строка матрицы фотоплана формируется из
строки трансформированного снимка P1, включая граничный пиксел и строки снимка P2, начиная с пиксела, следующего за граничным.
Таким методом можно присоединить к созданному фотоплану другие перекрывающиеся
снимки.
Цифровые фотопланы могут быть созданы путем
формирования матрицы цифрового фотоплана непосредственно по всем
перекрывающимся цифровым снимкам. На рис.80 иллюстрируется процесс формирования
цифрового фотоплана этим методом.
В рассматриваемом методе на перекрывающихся
цифровых изображениях снимков проводят линии пореза, которые представляют собой
полилинии. По координатам узлов полилинии в системе координат цифрового снимка
определяют координаты проекций узлов полилинии на цифровом фотоплане в системе
координат объекта и формируют полилинии на цифровом фотоплане.

исходные
цифровые снимки

цифровой
фотоплан
Рис.80
По этим полилиниям определяют граничные
пикселы, которые формируют границы участков цифрового фотоплана, формирование
которых будет производиться по соответствующим цифровым изображениям снимков.
Формирование цифрового фотоплана в пределах каждого из этих участков
производится аналогично процессу формирования цифрового ортоснимка, изложенного
в разделе выше.
Определение координат X,Y узлов
полилинии в системе координат цифрового фотоплана по значениям координат xc, yc их изображений в системе координат цифрового
изображения снимка производится методом приближений следующим образом.
По координатам xc, yc изображения узла вычисляются координаты x, y
изображения узла в системе координат снимка. В случае если при внутреннем
ориентировании цифрового снимка использовались аффинные преобразования, эти
вычисления производятся по формулам:
 .
.
Затем вычисляются значения координат X, Y узла в
системе координат цифрового фотоплана по формулам:
|
X = XS + (Z – ZS)X¢/Z¢ Y = YS + (Z – ZS)Y¢/Z¢, |
(162) |
в которых:

В первом приближении значение высоты узла принимают
равной среднему значению высот точек цифровой модели рельефа Z1. По вычисленным значениям X1,Y1, используя цифровую модель рельефа, методом билинейной интерполяции,
определяют уточненное значение высоты узла Z2, по которому определяют уточненное значение координат узла X2,Y2. По координатам X2, Y2
узла, в свою очередь, определяют новое значение высоты узла Z3.
Вычисление продолжают до тех пор, пока разность
значений координат X и Y узла в приближениях не будут превышать
установленного допуска. Возможен вариант, в котором контролируется разность
высот точек узла в приближениях.
Процесс
определения координат X,Y узлов
полилинии методом приближений представлен на рис.81. Отметим
также, что цифровые методы позволяют использовать параметры сглаживания
Их следует устанавливать для того, чтобы добиться изменения оптических
плотностей (функции яркости) снимков с целью их взаимного выравнивания
(уравнять общий фон разных фотоснимков для того, чтобы уменьшить контрастность
перехода от одного снимка к другому). В результате переход от одного фотоснимка
к другому становится незаметен.
В Талке (Тюкавкин) соединение снимков в фотоплан или
фотосхему происходит так: фотоснимки упорядочиваются в маршрутах слева направо
(а если маршруты идут по столбцам маршрутной схемы, то сверху вниз), а сами
маршруты — сверху вниз. Так, в приведенном ниже примере 622 — первый снимок
проекта, 623 — второй –… -, 807 седьмой и т.д. Пусть фотоснимки проекта
расположены в трех маршрутах, идущих по строкам маршрутной схемы следующим
образом:
622 623 624 625 626 627
807 806 805 804 803
1111 1112 1113 1114 1115
Первый фотоснимок проекта укладываются на создаваемый
лист фотоплана с учетом искажений за рельеф, наклона оптической оси, дисторсии
и т.п. При этом заполняется только те точки (пиксели) фотоплана, которые
приходят из области, нанесенной на первом снимке, то есть часть снимка вне
области как бы отрезается и выбрасывается.
После этого берется второй фотоснимок и вычисляется, с
учетом всех законов трансформирования, зона на листе фотоплана, в которую
перейдет область второго фотоснимка. Эта зона заполняется значениями оптических
плотностей второго фотоснимка. Причем в пересечении зон остаются значения
оптических плотностей первого снимка. Таким образом, фотоснимок с меньшим
номером имеет приоритет при заполнении фотоплана.
Вывод следует такой: при нанесении зоны на снимке редактировать ее
левую и верхнюю сторону не нужно, так как эта сторона накрывается другим
снимком. Области на снимках должны выглядеть примерно так, как показано на рис.
82
На рис 83 изображена примерная укладка
областей на лист фотоплана. Сам лист изображен жирной черной рамкой. Все, что
вне рамки — не заполняется.
Область, заполняемая со снимка 622, залита зеленым, снимок 623 –
голубым, 624 – синим, 625 – красным, 804 – желтым (остальные не показаны).
Из рисунка ясно, почему не нужно редактировать
левую и верхнюю границу области фотоснимка 804 — они все равно затираются
фотоснимками 625, 626 сверху и фотоснимком 805 слева, так как данные снимки
имеют приоритет. Более того, редактирование верхней и правой границы области
фотоснимка 804 вредно, так как при этом можно случайно «отрезать лишнее», что
приведет к появлению черной дыры на фотоплане.

Рис. 82
Для наглядности такая ошибка в
построении областей приведена на рис. 83. Между снимками 625, 626 и 804 имеется
«дыра». Она появилась из-за неправильно построенной области на снимке 625, там
есть большая неоправданная выемка. Вообще же линию разреза, то есть
редактируемую правую и нижнюю сторону следует вести примерно посередине области
перекрытия снимков, то есть процентов на 30 размера снимка от правого края и на
15-20 от нижнего.

Следует обратить внимание и на то,
что область на снимке 625 после входа (если идти справа налево в нижней части
снимка) в область снимка 624 резко поднимается вверх. Это делается для того,
чтобы избежать повторного выхода из области. Такая ошибка демонстрируется на
рис. 84:
Собственно, ошибкой это не является, но
производит неприятное впечатление мелкокусочного фотоплана.
После примерного построения областей обычно
приступают к их редактированию. Для этого каждый снимок открывается отдельно и
области редактируются в крупном увеличении, обычно от 1:4 или даже 1:1. При
этом для редактируемых сторон областей необходимо придерживаться следующих
принципов.
1)
граница области должна
проходить вблизи от центральной линии зоны перекрытия соседних снимков; для
продольного перекрытия это обычно означает отступ порядка 30% от края
фотоснимка (так как зона перекрытия имеет порядок 60%), для поперечного —
порядка 15% от края;
2)
в случае использования
метода «фотоплан» без построения рельефа граница области должна проходить по
возможности вблизи от определяемых или опорных точек, заданных оператором в
процессе работы с точками; допускается прохождение границы через точки;
3)
граница области не должна
разрезать малоразмерные высотные объекты, в основном это относится к зданиям и
постройкам всех типов;
4)
длинномерные объекты и
четкие контура (дороги, реки и т.п.), которые невозможно обойти, должны разрезаться
по возможности под прямым углом
закругленные углы и линии (то есть ломаные
линии с большим числом;
5)
предпочтительнее
закругленные углы и линии (то есть ломаные линии с большим числом звеньев).
6.2.9.3
Точности цифровых трансформированных фотоснимков и фотопланов
Созданные в результате цифрового
трансформирования снимков цифровые изображения местности по точности должны
соответствовать требованиям, предъявляемым к их точности нормативными
документами Роскартографии, если фотопланы предназначены для создания
кадастровых и топографических карт (планов) или технического задания на
производство работ, если фотопланы создаются для решения других задач.
Контроль созданных трансформированных
фотосников и фотопланов проводят по расхождениям значений координат контрольных
точек, измеренных непосредственно на цифровом плане и координат этих точек,
определенных в результате геодезических измерений или в результате построения
сети пространственной фототриангуляции. В качестве контрольных точек выбираются
точки, расположенные непосредственно на земной поверхности, так как изображения
объектов местности возвышающихся над ней (крыши домов, мосты и т.п.) имеют на
фотопланах искажения. Контроль фотопланов производится также по расхождениям
одноименных контуров расположенных на линии пореза (граничной линии) смежных
трансформированных фотоснимков.
В случае если трансформированные фотоснимки и
фотопланы создавались для создания топографических и кадастровых карт (планов),
расхождения в плане положения контрольных точек не должны превышать величины
0.5 мм в масштабе создаваемой карты (плана), а расхождения одноименных контуров
на граничной линии величины 0.7 мм.
Перед процессом формирования цифровых
трансформированных изображений, с целью контроля точности определения элементов
ориентирования исходных снимков и построенной цифровой модели рельефа
местности, производят априорную оценку их точности.
Она производится по контрольным точкам, путем
сравнения значений их плановых координат, определенных в результате
геодезических или фотограмметрических определений и значений координат
расчетного положения изображения контрольной точки на трансформированном
изображении.
Определение плановых координат расчетного
положения изображения контрольной точки производится по значениям координат
изображений контрольных точек на исходных снимках, значениям элементов
внутреннего и внешнего ориентирования снимков, параметрам внутреннего
ориентирования снимка в системе координат цифрового изображения с
использованием цифровой модели рельефа. При этом используется алгоритм,
аналогичный алгоритму определения координат углов граничной линии на фотоплане.
При определении координат в качестве начального
приближения, используется высота контрольной точки, значение которой было
определено в результате геодезических или фотограмметрических определений.
Проведение априорной оценки точности позволяет
проконтролировать качество фотограмметрических работ, выполняемых для
обеспечения процесса цифрового трансформирования и при необходимости повторить
эти процессы.
6.2.10
Основные сведения о векторизации
Векторизация это один из основных процессов любой
цифровой фотограмметрической системы. Можно сказать, что все остальные
действия: внутреннее ориентирование снимков, их взаимное ориентирование и т. д.
для этого и выполняются. В процессе векторизации по растровому изображению
наносятся ситуация и пикеты характерных точек местности.
В
программном комплексе PHOTOMOD для
построения и редактирования в моно или стереорежиме визуализации векторных
объектов: пикетов, полилиний, контуров и прямоугольников предназначен
специальный модуль стереовекторизации StereoDraw. У цифровой
фотограмметрической станции ЦФС этому процессу отведен специальный режим работы
«Сбор»,
который предназначен для векторизации данных с растровых источников
(сканированных аэро и космических снимков, планов и т.п.). Существует такой
режим работы и в программе Талка. Он называется «Стереокарта».
Технология
сбора ситуации и рельефа в каждом из рассматриваемых программных продуктов
своя. Но много и общих черт. Связано это с тем, что любой векторный объекты
представляют собой сочетание координатной информации о пространственной форме
объекта (координаты вершин) и атрибутивной информации, описывающей тематическое
содержание объекта.
Во всех программах поддерживается понятие слой. Это
основная характеристикой объекта. Он определяет его групповую принадлежность и
вид на карте. Концепция слоев
позволяет группировать близкие по какому-либо признаку объекты на отдельных
слоях, управлять видимостью и экспортом объектов. Остальные названия в иерархии атрибутов различны.
Например,
в ЦФС Слой имеет имя, которое описывает принадлежащие ему объекты (например:
дорога проселочная) и идентификатор — уникальный номер. Он содержит информацию
об атрибутах линии и заливки, условном знаке, и пр. Ему могут быть доступны (по
выбору пользователя) различные параметры, то есть поля базы данных, в которых
хранятся характеристики объектов. Он имеет поле статуса, которое управляет
видимостью и редактированием его объектов. Используя код слоя (поле ID в
Менеджере слоев), можно организовать слои в иерархическом порядке. Иерархия
позволяет просматривать слои в виде «дерева», что облегчает
ориентирование в длинном списке. Слои располагаются в списке в определенном
порядке: они могут быть упорядочены по имени, либо по идентификатору.
Идентификатор слоя влияет также на иерархию слоев, когда список изображается в
виде «дерева».
Используется
в ЦФС и понятие «параметры». Это характеристики объекта, которые описывают
каждый объект в отдельности, сохраняя для каждого его уникальные свойства.
Параметры представляют собой поля внутренней базы данных, которая сохраняется
вместе с картой. Подпись представляет собой любой параметр объекта, который
выносится на карту для отображения. Геометрические характеристики объектов
(точка, прямоугольник, сфера и т.д.) объединены понятием «шаблон».
В программе PHOTOMOD каждый из графических
объектов также относится к некоторому слою. Если в процессе создания
векторных объектов используется таблица кодов (классификатор), любой объект
может быть к ней привязан, т.е. ему может быть присвоен код при его создании
или впоследствии. В этом случае информационное содержание объекта (значения
большинства свойств и состав атрибутов) определяется описанием данного кода в
таблице и может изменяться только вместе с кодом. Таблица кодов хранится в
ASCII файле с расширением .ctb и может загружаться либо при запуске модуля
StereoDraw, либо впоследствии с помощью команды «Загрузить таблицу кодов» из
меню «Файл».
Каждый из векторных объектов описывается следующим
набором свойств: имя, тип, слой, размер, код, имя кода, символ и цвет.
Атрибуты — это дополнительные параметры, которые могут
приписываться объекту, если он создается с использованием таблицы кодов, и
соответствующий ему код характеризуется наличием атрибутов (т.е. этот код
присутствует в таблице атрибутов). В этом случае описание атрибутов должно
содержаться в таблице атрибутов, которая хранится в отдельном ASCII файле в той
же директории и с тем же именем, что и у файла таблицы кодов, но с расширением
.atb. Атрибуты, описанные в таблице атрибутов, приписываются всем объектам с
данным кодом при их создании.
Объекты, не привязанные к таблице кодов, могут иметь
произвольные значения свойств и состав атрибутов. Они является индивидуальной
характеристикой объекта независимо от того, связан данный объект с таблицей
кодов или нет.
В программе Талка для каждого векторного объекта
карты, помимо координат вершин и идентификатора объекта, в базе данных
хранится внутренний код. Идентификаторы двух различных объектов карты
всегда различны. Внутренний код является общим для некоторой группы объектов
карты (слоя). Он почти всегда скрыт от пользователя. Классификатор служит для
того, чтобы каждому внутреннему коду сопоставить некоторые характеристики. К
ним можно отнести: геометрический тип объекта (область, линия, точка или массив
точек), толщину и цвет линии, семантику (название кода), знак (для точечных
объектов), а также внешний цифровой код («Код Невы – Панорамы»).
Следует отметить, что все программные продукты
позволяют создавать новые классификаторы и редактировать существующие. Саму
технику векторизации можно изучить только при работе с конкретной прогаммой. Созданные векторные объекты могут затем
использоваться при построения ЦМР (модуль PHOTOMOD DTM) для создания трехмерной
сеточной модели или экспортироваться в различные векторные форматы для
использования в других системах (в DXF файл, в какие либо разновидности ASCII
формата и т.д.)
6.2.11 Построение
цифровых моделей
Построение ЦМР это также очень важный этап работы
любой цифровой фотограмметрической системы. Без нее невозможно выполнить
трансформирование снимков рельефной местности и ортотрансформирование,
автоматизировать процесс нанесение горизонталей и проч. Кроме того, ЦМР
представляет и самостоятельный интерес для специалистов различных областей
науки и техники.
Строят ее в ручном и автоматическом режиме. В
первом случае необходимо набрать высотные пикеты характерных точек рельефа
местности и по характерным его линиям. Чем больше таких точек, тем точнее будет
ЦМР.
При построении в автоматическом режиме
получается, как правило, регулярная ЦМР, являющаяся набором точек в некоторых
границах, расположенных по сетке с одинаковым шагом. Значения высот в этих
точках определяются с помощью коррелятора (например, модуль DTM
программы PHOTOMOD) или методом интерполирования по значениям высот,
набранных в процессе векторизации пикетов (Талка).
Алгоритмы построения ЦМР различны, и в модуле DTM
(Digital Terrain Model), например, их несколько: регулярная, адаптивная,
гладкая и оптимизация. Он строит и визуализирует ЦМР исследуемого объекта в
виде пространственной сети триангуляции TIN (Triangulation Irregular Network);
Какую из четырех моделей построения ЦМР использовать зависит от характера
местности.
Любая программа обеспечивает редактирование
ЦМР, построенной в автоматическом режиме, проведение горизонталей с заданным
сечением, построение профилей местности, определение объемов и т.д.
6.2.12 Особенности
основных отечественных фотограмметрических станций
6.2.12.1 Пакет PHOTMOD SP
PHOTMOD это название программного обеспечение для
персональных компьютеров по цифровой обработки снимков, которое было
разработано, постоянно совершенствуется и внедряется компанией Ракурс (Москва).
Компания была основана в 1993 году, и в настоящее время ее продукция успешно
эксплуатируется на многих предприятиях России, странах СНГ и дальнего
зарубежья. Одним из первых ее продуктов и был PHOTMOD SP,
который ориентировался, прежде
всего, на обработку наземным снимков. Он имел модульную структуру, и
обеспечивал: построение моделей по паре снимков и их внешнее ориентирование;
построение цифровых моделей рельефа и работу с ними; трансформирование снимков
и векторизацию. К сожалению это направление пока не получило дальнейшего развития.
Затем появился PHOTMOD АТ, обеспечивающий обработку блока снимков,
состоящего из нескольких маршрутов. Последняя версия PHOTMOD 3.51 обеспечивает:
—
Обработку снимков
центральной проекции и сканерных изображений.
—
Выполнение блочной
фототриангуляции.
—
Создание цифровых моделей
рельефа.
—
Создание ортофотоплана.
—
Векторизацию в
стереорежиме и по ортофотоплану.
—
Создание и печать
электронных карт.
—
Калибровку планшетных
полиграфических сканеров.
Рекомендуемые требования к программным и
аппаратным средствам: процессор Pentium IV 2 GHc; оперативная память 512 MB;
операционная система Windows 2000; графическая карта True color,
64 MB, аппаратная поддержка OpenGL quad—buffering.
К дополнительному оборудованию относят жидкокристалические (затворные) и
анаглифические очки для стереонаблюдений и специализированную 10-кнопочную
мышь.
Благодаря гибкой модульной структуре и сетевым
возможностям PHOTMOD может
использоваться как:
—
Локальная
полнофункциональная цифровая фотограмметрическая станция.
—
Распределенная сетевая среда
для реализации больших проектов
—
Дополнительные рабочие
места к имеющимся фотограмметрическим системам типа Helava, Integraf для
выполнения наиболее трудоемких операций (стереовекторизации, построения и
редактирования ЦМР).
Как отмечалось, PHOTMOD SP хорошо
адаптирован для наземной фотограмметрии. Он многомодульный и включает:
1.
Основной модуль. Он
предназначен, главным образом, для построения модели по паре снимков и ее
внешнего ориентирования.
2.
Модуль стереовекторизации
(StereoDraw) – служит для построения и редактирования в моно или стереорежиме
визуализации векторных объектов: точек, полилиний, полигонов и прямоугольников.
3.
Программный модуль
создания цифровых моделей рельефа (ЦМР или DTM (Digital Terrain Model)). Он не
может эксплуатироваться автономно, поскольку использует результаты процедур
взаимного и внешнего ориентирования, в модулях PHOTOMOD SP. Модуль
предназначен: для построения и визуализации ЦМР исследуемого объекта в виде
пространственной сети триангуляции TIN (Triangulation Irregular Network);
анализа и редактирования модели в режимах моно и стереоскопического
отображения; формирования в автоматическом режиме ортотрансформированных
изображений; расчета и визуализации горизонталей; экспорта ЦМР (TIN) в
распространенные векторные форматы и т.д.
4.
Модуль VectOr — это
фактически геоинформационная система, предназначенная для создания и
редактирования электронных карт, решения типовых прикладных задач и разработки
специализированных ГИС-приложений в среде Windows 95, 98, Windows NT и Windows
CE. Система позволяет создавать векторные, растровые и матричные карты, а также
оперативно обновлять различную информацию о местности.
При реализации нового проекта работу начинают
с основного модуля. Предварительно снимки (если они не цифровые) сканируют с
учетом изложенных выше рекомендаций. Но следует помнить, что чрезмерно завышать
уровень разрешения нецелесообразно, так как резко возрастает объем
обрабатываемой информации, что приводит к трудностям в работе. Для компенсации
искажений возникающих при использовании полиграфического сканера используют
специальную технологию, которая включает: сканирование калибровочной сетки,
расчет поля искажения сканера и коррекцию цифрового снимка с помощью программы Scan—Correct.
Сохранять цифровые снимки следует в формате .bmp
Далее создается база данных, в которой
хранятся исходные цифровые снимки и будут храниться все другие изображения и
данные, появление которых связано с построением и внешним ориентированием
модели. В процессе работы может быть создано несколько баз данных, но работать
можно только с текущей.
Окно базы данных является одним из основных
элементов интерфейса программы. Оно служит для отображения информации о текущей
базе данных и для выполнения операций над ее объектами. Основными такими
операциями являются: ввод исходной стереопары; внутреннее ориентирование
снимков, геопривязка левого снимка; обеспечение стереопары набором
соответственных точек; взаимное ориентирование снимков (построение модели);
перенесение опознаков на правый снимок, внешнее ориентирование модели, выход из
модуля ориентирования с сохранением полученных результатов. Рассмотрим каждую
из операций в отдельности, но конечно без детализации.
Для того, чтобы ввести снимки нужно
воспользоваться виртуальными клавишами левый/правый в окне базы данных и
указать в диалоговом окне путь и имя bmp файла, содержащего соответствующее
изображение. При выполнении операции цветные снимки можно преобразовать в
черно-белые и изменить масштаб изображения.
В процессе внутреннего ориентирования снимков
(виртуальная клавиша внутреннее ориентирование) с помощью марки указываются
координатные метки на левом и правом снимках, положение главной точки (смещение
объектива). Кроме того, вводится фокусное расстояние снимков, расстояния между
координатными метками и дисторсия, если они известны. В качестве единиц
измерения выбирают миллиметры или пикселы. Пересчет из одной системы в другую
легко выполнить, если известно разрешение сканирования, которое вводится при
первом запуске базы.
Геопривязка включает выбор системы координат,
нанесение на левый снимок опознаков и опорных отрезков, если такие есть (до 99
единиц каждого из объектов), введение координат точек базиса. Возможен и
процесс редактирования.
В программе предусмотрено, что для взаимного
ориентирования снимков необходимо иметь как минимум 8 соответственных точек.
Первые три вводятся вручную, но их положение может быть уточнено с помощью
механизма корреляции. Затем может быть задействован механизм автоматического
добавления соответственных точек. В процессе выбора точек на экран выдается
сообщение о величине коэффициента корреляции. Хорошо когда он более 0.9, но
даже и в этом случае корреляционный механизм дает сбои и оператору необходимо
осуществлять визуальный контроль. В процессе их введения можно заниматься
редактированием.
При взаимном ориентировании программа
определяет взаимное угловое расположение снимков в момент съемки и преобразует
исходные изображения в трансформированные. Их еще называют эпиполярными
снимками. Такие изображения имеют те же центры проекций, но отличаются тем, что
соответственные точки на них имеют практически одинаковые y—
координаты, что значительно ускоряет автоматический поиск соответственных точек
и выполнение основанных на нем операций измерений и автоматического построения
ЦМР. При известных параметрах внутреннего ориентирования, программа использует
классические уравнения коллинеарности для множества пар соответственных точек,
задаваемых в полуавтоматическом режиме. Существенным преимуществом программы
является возможность проведения взаимного ориентирования при неточном знании
параметров внутреннего ориентирования, что делает возможным использование
программы в задачах с неполным набором исходных данных. Взаимное ориентирование
выполняется, если соответственных точек не менее 8 нажатием на соответствующую
виртуальную клавишу. В результате на экране появляется сообщение, в котором
указываются элементы взаимного ориентирования в базисной системе координат
(если решение найдено) максимальное значение остаточного поперечного параллакса
в пикселах и его среднее значение. Можно вызвать таблицу соответственных точек
с параллаксами на каждой из них, что позволяет плохие точки удалить и взаимное
ориентирование повторить. Считается приемлемым, если остаточные поперечные
параллаксы по величине не превосходят одного пиксела.
Процедура абсолютного (внешнего) ориентирования модели
служит для определения параметров ее пространственного и углового расположения
по имеющимся опорным данным. В качестве опорных данных могут использоваться
опорные точки и (или) опорные отрезки. В зависимости от количества и типа
используемых опорных данных, процедура абсолютного ориентирования позволяет
построить либо свободную модель, имеющую правильный масштаб, но произвольную
ориентацию в пространстве, либо модель в пользовательской системе координат (в
той системе координат, в которой заданы опорные точки). Для построения
свободной модели необходим лишь один (для большей точности лучше два) опорный
отрезок, а для построения модели в пользовательской системе координат – не менее
четырех опорных точек, с известными X, Y, Z координатами. Избыточное количество опорных
данных позволяет компенсировать ошибки, внесенные на этапе взаимного
ориентирования из-за неточности параметров внутреннего ориентирования.
Перед внешним ориентированием модели следует
перенести опознаки с правого снимка на левый. Для этого можно использовать
корреляционный механизм, но если коэффициент корреляции мал, то лучше это
сделать вручную.
После операции переноса опознаков выполняется
внешнее (абсолютное ориентирование) модели. При этом в процесс уравнивания
можно включать и не включать точки базиса, корректировать список используемых
опознаков, редактировать их координаты и т.д. Основные результаты внешнего
ориентирования показываются в окне, которое является предметом анализа. Если
результаты удовлетворительны, из модуля можно выходить с сохранением
результата. Программа выполнит трансформирование изображение и сформирует
стереоизображение, которое можно рассматривать уже в другом модуле StereoDraw.
Рассматривать стереокартину в указанном выше
модуле, можно используя анаглифические или затворные очки (по выбору).
Пространственная измерительная марка управляется как с клавиатуры, так и мышью.
Можно использовать и коррелятор. На экране отображаются пространственные
координаты марки. Модуль является основным при съемке подробностей. Основными
элементами, которые можно использовать при нанесении ситуации и рельефа
являются векторные объекты: точка, полилиния, полигон и прямоугольник. Каждый
из векторных объектов имеет набор характеризующих его параметров. Часть из них
задается с помощью таблицы кодов, которую можно редактировать и пополнять в
соответствии с характером измеряемого объекта. Объекты могут быть сгруппированы
по слоям. Созданные векторные объекты могут быть сохранены, использованы для
построения цифровой моделей рельефа (модуль DTM) или экспортированы в другие векторные
форматы, например DXF, для использования в других приложениях.
Достоинством программы является возможность построения
ЦМР в автоматическом режиме с возможностью последующего ручного редактирования.
Процедура построения ЦМР основана на автоматическом вычислении с помощью
корреляционного алгоритма пространственных координат набора точек изображения,
определяемых регулярной сеткой, размер и положение которой задается
пользователем. ЦМР позволяет легко и с высокой точностью получать
ортоизображение и использовать его в качестве растровой подложки при создании
векторных объектов. Внутренний формат ортоизображения несет полную
пространственную информацию о точках местности, что позволяет вычислять
реальные метрические характеристики векторных объектов. Система позволяет
строить полутоновое изображение поверхности рельефа, производить высотную
окраску рельефа, натягивать реалистичное (левое) изображение на сеточную модель
и визуализировать полученную поверхность в произвольном ракурсе.
В программном модуле DTM
предусмотрены четыре способа построения модели рельефа: регулярная, адаптивная,
гладкая и оптимизированная. “Регулярная ” модель предусматривает определение
искомых трехмерных координат рельефа во всех заданных точках модельной сетки.
Вариант “Гладкая” модель по набору точек (пикетов) строит интерполяционную
поверхность на растровом изображении. Выбор варианта “Адаптивная” модель
рекомендуется использовать при обработке изображений со значительными
односторонними областями или достаточно гладкими поверхностями. При внесении
значительных изменений в модель при ручном ее редактировании рекомендуется
использовать вариант “Оптимизация”.
6.2.12.2 Пакет PHOTMOD AT
Программный модуль PHOTOMOD AT служит для выполнения
комплекса работ по построению и уравниванию маршрутных и блочных сетей
пространственной фототриангуляции. Этот модуль может быть использован как
автономная система или в качестве составной части цифровой фотограмметрической
системы PHOTOMOD.
При
использовании модуля PHOTOMOD AT» в составе системы PHOTOMOD конечной целью
работ по построению и уравниванию сетей фототриангуляции является определение
значений элементов внешнего ориентирования снимков, которые используются при
последующей фотограмметрической обработке стереопар снимков в программных
модулях DTM и StereoDraw. В этом случае при построении сети фототриангуляции
нет необходимости выбирать связующие точки на изображениях четких контуров
местности, так как идентификация соответственных изображений связующих точек на
всех перекрывающихся снимках производится автоматически с помощью коррелятора
или интерактивно стереоскопически.
Если фототриангуляция выполняется для определения
координат и высот точек, используемых как опорные при последующей
фотограмметрической обработке одиночных и стереопар снимков, то эти точки
необходимо выбирать на изображениях четких контуров местности.
Программный модуль PHOTOMOD AT состоит из 2-х блоков:
Менеджер проектов и Фототриангуляция.
Диалоговое окно Менеджера проектов имеет 2 закладки:
Проекты; Камеры.
Диалоговое окно проектов содержит список
проектов, созданных на данной станции с указанием уникального имени и даты
создания. Список проектов можно сортировать по имени или дате создания нажатием
на соответствующий заголовок.
Закладка Камеры предназначена для создания и
редактирования каталога съемочных камер.
Основные этапы фототриангуляции:
1.
Формирование блока.
2.
Внутреннее ориентирование.
3.
Создание каталога опорных
точек.
4.
Измерение опорных точек на
снимках.
5.
Ввод межмаршрутных связей
и измерение точек сети.
6.
Ввода связующих точек на
перекрывающихся снимках соседних маршрутов (Межмаршрутные связи).
7.
Измерение точек сети.
8.
Работа со схемой сети.
9.
Построение и уравнивание
сети фототриангуляции.
Таким образом, в рамках стереотопографической
съемки использование программного модуля PHOTOMOD AT связано с этапом
камерального сгущения съемочного обоснования.
6.2.12.3 Талка
Программный комплекс «Талка» разработан в лаборатории
№22 ИПУ РАН и в настоящее время существует несколько его версий. Он
предназначен для создания цифровых фотопланов, ортофотопланов и фотосхем, а
также ЦМР и векторных контуров объектов с использованием космических и
аэрофотосъемочных материалов. Комплекс обеспечивает:
— Работу в местной системе координат или в проекции
Гаусса-Крюгера в соглашениях 1942 года.
— Ввод маршрутной схемы с указанием направления
залета, взаимного расположения аэроснимков, приближенного значения продольного
и поперечного перекрытия в процентах, координат центров фотографирования
— Ввод стандартной таблицы дисторсии объектива АФА,
таблицы крестов или положения координатных меток и других параметров
внутреннего ориентирования фотоснимков. Расчет ошибок снимка с учетом всех этих
данных и с использованием результатов расчета внутреннего ориентирования во
всех дальнейших вычислениях.
— Просмотр фотоснимков с одновременным выводом на
экран любого их количества, создание технического проекта, создание репродукции
накидного монтажа и увеличение фрагментов фотоснимков.
— Расстановку опорных и контрольных точек с выводом
координат планово-высотной подготовки.
— Ручную и автоматическую расстановку определяемых
точек по зонам, контрольный пробег по точкам с выводом на экран абрисов точек в
заданном увеличении, автоматическую идентификацию точек разных фотоснимков.
— Возможность объявления любых фотоснимков
стереопарой.
-Построение стереоконтуров по стереомодели с экспортом
в DXF формат в заданной системе координат после проведения
блочной фототриангуляции.
— Автоматическое построение ЦМР по стереопаре с учетом
введенных оператором стереоточек, проверку и исправление построенной ЦМР.
— Развитие аналитической блочной фототриангуляции с
учетом данных взаимного ориентирования каждой стереопары, уравниванием всей
модели и с внешним ее ориентированием.
— Создание единой ЦМР в указанной оператором области с
взаимной сводкой ЦМР, полученных по стереопарам;
— Построение горизонталей с рисовкой утолщенных
горизонталей, разрядкой горизонталей на крутых склонах, построением бергштрихов
и надписей в автоматическом режиме.
— Расчет смещения точек фотоснимка из-за влияния
рельефа с использованием построенной единой ЦМР, аналитическое
трансформирование снимков в цифровом виде с учетом смещения точек из-за влияния
рельефа, наклона оптической оси, ошибок снимков, усадки на опорные точки.
-Создание мозаичных ортофотопланов по серии снимков с
идеальным совмещением всех трансформационных точек снимков, фотометрическим
выравниванием фона изображений, созданием зарамочного оформления по
существующим стандартам, рисовкой горизонталей.
— Средства стереонаблюдений – стереоочки типа «3DMAX»
или «3DBIS» на станции – в случае обработки снимков с
построением ЦМР по стереомодели.
Выходной продукцией технологии являются: цифровые модели
рельефа местности, контура объектов DXF, горизонтали в DXF, цифровые фотопланы и
фотосхемы, цифровые ортофотопланы, твердые копии фотопланов с зарамочным
оформлением.
При работе с программой «Талка» оператору следует
различать две системы координат — входную и выходную. Для каждого
обрабатываемого проекта понятие входной и выходной систем координат
фиксированы.
Кроме того, в программе имеется понятие внутренней
(топоцентрической) системы, в которой ведутся все расчеты. Эта система
упомянута только для прояснения ситуации, пересчеты из входной во внутреннюю
систему и затем в выходную систему ведутся автоматически.
Входной системой координат в данной версии программы
является либо местная система координат, либо система координат в проекции
Гаусса-Крюгера с разбиением территории России на шестиградусные зоны. Эту
систему называют еще системой координат 1942 года или, для краткости, «Пулково
1942», как, например, в известной программе «Mapinfo». В случае
местной системы поверхность считается плоской и никаких исправлений за кривизну
Земли не вводится, она же является и выходной системой координат проекта.
В случае использования системы координат
Гаусса-Крюгера (1942 г.) все расчеты производятся в топоцентрической
(внутренней) системе координат. Затем их последовательно пересчетывают,
сначала в геодезическую, затем в геоцентрическую и, наконец, в топоцентрическую
систему. Тем самым учитывается кривизна земной поверхности. Внутренняя система
координат никак не отображается на экране, иными словами, оператор может не
знать о ее существовании. Центр топоцентрической внутренней системы помещается
в центр указанного оператором листа карты миллионного масштаба. Этот лист
указывается при задании так называемой выходной системы координат.
Выходная система координат задается как номер одной из
шестиградусных зон и первая буква номенклатуры листа миллионного масштаба.
Таким образом, входные данные могут принадлежать двум (и даже более) зонам, в
то время как выходные — обязательно одной из них.
Известно, что этот программный продукт был опробован
при решении производственных задач, и продемонстрировал хорошие результаты. В
частности, при составлении планов масштаба 1:500 по аэрофотоснимкам масштаба
1:10000, расхождение в расстояниях между точками на ортофотопланах (с учетом
масштаба) и соответствующими точками на местности не превышали 10см. Кроме
того, очень хороший результат был получен при составлении планов по
аэрофотоснимкам, когда внешнее ориентирование модели производилось не по
опознакам, а по координатам точек фотографирования полученным из GPS-определений
в процессе летносъемочных работ. Выводы:
1. Программный продукт «Талка» является уже сейчас
хорошей альтернативой действующим технологиям, в частности комбинированному
методу в его теперешнем варианте.
2. С использованием в производственном процессе
цифровых технологий легко сочетать приемы стереотопографической съемки с особенностями комбинированной даже в
рамках одного планшета, производя рисовку рельефа открытых и полуоткрытых
участков на компьютере при различной степени увеличения изображения. Замечено,
что процесс нанесение горизонталей при обработке стереомодели залесенной
местности выполняется значительно проще, если это делать при обратном
стереоэффекте.
- В связи с изменением технологии обработки снимков, нормативную
документацию придется пересматривать.
6.2.12.4 ЦФС
(Digitals/Delta)
Станция
позволяет:
—
Производить
сбор данных как в стерео, так и моно режиме.
—
Использовать
для сбора растровые файлы аэрокосмических снимков центральной и панорамной
проекций и сканированных карт и планов любого размера.
—
Передавать
собираемые данные в другие системы и использовать программы в качестве
навигационного инструмента совместно с GPS-приёмниками.
—
Автоматически
восстанавливать рельеф для ортофото.
—
Использовать
редактор условных знаков с поддержкой всех типов условных знаков.
—
Синхронно
изменять смежные объекты при редактировании.
—
Форматировать
вывод параметров и поддерживать различных единиц измерения.
—
Осуществлять
быстрый поиск объектов по любой совокупности их параметров.
—
Выполнять
автоматическое построения полигонов из «лапши».
—
Производить
привязку к объектам, текстовых, графических и прочих файлов.
—
Сохранять
карты в файле со сжатием.
—
Выполнять
распаевку земельных участков с учетом качества земель.
Имеет
интерфейс с портативными GPS-приемниками для использования в навигационных
целях.
6.3
Комбинированный метод АФС
Комбинированный метод также может быть
реализован в двух вариантах. Один из них предполагает, что контурная часть
создается на основе изготовления фотоплана, второй, что она наносится на чистую
основу в процессе стереообработки снимков на аналоговых приборах или на
компьютере. Рельеф на плане и в том и в другом случаях отображается приемами
мензульной (или тахеометрической) съемки. В этот же период выполняется полевое
дешифрирование, либо уточняются результаты камерального дешифрирования.
Основными технологическими процессами комбинированного метода
аэрофототопографической съемки являются:
—
летносъемочный процесс;
—
Планово-высотная
подготовка снимков (привязка);
—
Фотограмметрическое
сгущение съемочного обоснования (фототриангуляция);
—
Трансформирование снимков
и изготовление фотоплана, если это предусмотрено технологией;
—
Нанесение ситуации на
чистую основу или фотоплан в процессе стерео (цифровой) обработки снимков;
—
Съемка рельефа и полевое
дешифрирование.
Выбор фокусного расстояния зависит от
технологии реализации комбинированной съемки.
Если предполагается составление фотопланов по
снимкам трансформированным на фототрансформаторах, то фотографирование
местности осуществляется АФА с фокусными расстояниями от 200 до 500мм.
Использовать длиннофокусные камеры необходимо для того, чтобы уменьшить
смещение точек за рельеф или число зон, если местность закрытая, но
пересеченная. Масштаб фотографирования выбирают в этом случае в зависимости от
масштаба съемки и метода трансформирования снимков (типа фототрансформатора).
При составлении горизонтальных планов на
компьютере или на стереофотограмметрическом приборе проблема искажения за
рельеф становится не актуальной и целесообразно использовать те параметры
аэрофотосъемки, что и при стереотопографическом методе (тем более, что при
современных технологиях возможно их сочетание, даже в рамках одной трапеции). В
принципе возможно составление и ортофотоснимков на компьютере, если использовать
ЦМР, построенную по данным существующих картографических материалов.
Особенность съемки рельефа в поле в том, что
нет необходимости создавать плановую съемочную сеть. Прокладывают только
высотные ходы методами геометрического или тригонометрического нивелирования, в
зависимости от принятой высоты сечения рельефа. Если в промежутке между
фотографированием и съемкой рельефа произошли какие-либо изменения, например,
появились новые объекты, то их наносят на фотоплан (основу), путем привязки к
уже имеющимся четким контурам. Отметим, что весь процесс составления плана, как
правило, растягивается на два сезона.
6.4
Особенности аэрофототопографической съемки карьеров
Аэрофотосъемку карьера выполняют с целью составления и
пополнения планов горных выработок, отвалов, хвостохранилищ, промплощадок,
складов готовой продукции, и других объектов, а также для построения их
цифровых моделей и, при необходимости, фотопланов. На организацию и параметры
аэрофотосъемки влияют: место расположение карьера, его размеры,
производительность, технология разработки, масштаб составляемого плана,
параметры горных выработок и другие факторы. При проектировании съемки
учитываются требования действующей маркшейдерской инструкции, которая, в
частности, устанавливает два масштаба маркшейдерских планов: 1:1 000 и
1:2 000. Преимущественным методом составления плана является
стереотопографическая съемка, при этом предусматривается сплошная привязка
снимков, так как промежуток времени между фотографированием и получением окончательного
продукта весьма ограничен (всего несколько дней). Основными процессами, съемки
являются: составление проекта, выбор, закрепление и маркировку точек съемочного
обоснования, выполнение линейно-угловых измерений и вычисление координат точек,
летносъемочный процесс, стереообработка снимков и составление плана, как в
цифровом виде, так и на жесткой основе.
Съемку карьера выполняют периодически, как правило,
один раз в месяц, причем фотографируют его не раньше, чем за пять дней до конца
месяца, если оплата объемов извлечения горной массы производится по
маркшейдерским замерам. Летносъемочные работы выполняют специализированные
организации. В отличие от других объектов горные выработки карьеров
располагаются на различной глубине, и когда число уступов более 10-15, условия
съемки на верхних и нижних горизонтах различны, что следует учитывать при
составлении проекта. Наиболее эффективна съемка группы близко расположенных
друг к другу карьеров. В этом случае обработку материалов может осуществлять
единая специализированная фотограмметрическая лаборатория.
Маркшейдерские планы в основном составляются на
универсальных стереофотограмметрических приборах (аналитических или
аналоговых). В последнем случае предпочтение отдают приборам, у которых большой
диапазон перемещений мостика отстояний, богатый выбор коэффициента
преобразования масштаба снимка к масштабу плана и которые обеспечены периферией
для автоматизации процессов составления плана.
При составлении проекта используют план карьера
масштаба 1:5 000 или 1:10 000. Данными при расчете параметров
летно-съемочных работ являются конфигурация и глубина карьера, масштаб
составляемого плана, требования к точности определения объемов вскрыши и
добычи, периодичность съемки, возможности обрабатывающих приборов. Задача
расчета параметров аэрофотосъемки многовариантна. Оптимально то решение, при
котором план всего участка составляется с требуемой точностью при минимальном
числе маршрутов и снимков в маршруте. Наилучший вариант, если направления
маршрутов параллельны основному фронту ведения горных работ. Причем естественно
стремление обойтись только одним маршрутом, если карьер имеет вытянутую форму.
Поэтому расчет начинают с измерения его ширины L и
вычисления высоты H фотографирования по формуле![]() , где l – формат кадра,
, где l – формат кадра,
равный 18см. При этом следует учитывать, что масштабы фотографирования не
должны быть мельче 1:10 000 – при съемке горных выработок в масштабе
1:1 000 и съемке для контрольного определения объема выемки за два года и
более длительный период, 1:15 000 – если масштаб маркшейдерского плана
1:2 000, 1:5 000 – при съемке складов полезного ископаемого,
1:25 000 – при съемке отвалов вскрышных пород. Расчет следует вести
относительно нижних уступов, масштаб изображения которых будет минимальным.
Отсюда следует, что при глубине карьера до 300м можно использовать АФА с
небольшим фокусным расстоянием (70 – 100мм). При большей глубине фокусное
расстояние принимают равным — 140 или 200мм. Если указанные выше требования не
выдерживаются, то фотографируют несколькими маршрутами с соблюдением следующих
технических требований:
—
заданное продольное
перекрытие снимков – 60 или 80%,
—
углы наклона снимков – до
4°,
—
изменение высоты полета в
пределах маршрута – не более 50м,
—
допустимый смаз
изображения – 0.05мм.
Аэрофотосъемочное оборудование устанавливают
на самолете типа АН-2 или вертолете К-26.
При ежемесячной съемке карьеров глубиной до
200м каждую стереопару обеспечивают четырьмя планово-высотными опознаками,
расположенными по углам зоны продольного перекрытия. Если глубина больше, или
цель съемки — контроль определения объемов выемки за длительный период,
необходим дополнительный высотный опознак в центре стереопары. Плановые
планово-высотные опознаки – маркируют.
В процессе стереообработки внешнее
ориентирование модели осуществляют не менее чем по четырем опознакам. Невязки
на них не должны быть одного знака и превышать 0.4мм в плане и 0.03% по высоте
(относительно высоты фотографирования над средней плоскостью снимаемого
участка) Бровки уступа рисуют при непрерывном ведении измерительной марки по их
видимому контуру на геометрической модели. Если откосы уступов имеют сложную
форму, то кроме бровок проводят горизонтали (приблизительно посередине откоса)
или наносят границы осыпи. На характерных точках бровок и контуров осыпей берут
высотные пикеты с точностью до дециметров. Расстояния между смежными пикетами
не должны превышать 20м при съемке в масштабе 1:1 000 и30м, если масштаб
1:2 000. Поверхность взорванных пород изображают горизонталями через 2.5 —
5м или пикетами.
Пример расчета параметров фотографирования.
Требуется составить план карьера в масштабе 1:! 000. При этом ширина L
карьера – 1.2км, глубина – 170м. Обработку снимков предполагается выполнить на
топокарте с точностью mp измерения разности продольных параллаксов 0.01мм.
В соответствии с рекомендациями, приведенными
выше, попробуем обойтись одним маршрутом, и для фотографирования использовать
АФА с фокусным расстоянием 70мм. При заданных значениях высота
фотографирования, Н=525м над верхней поверхностью (при вычислении размер кадра
принят равным 16 см, чтобы не измерять на краях снимка, где большие искажения)
и 695м – над нижним уступом карьера. Масштаб фотографирования будет не менее
!:993, что удовлетворяет требованиям маркшейдерской инструкции. Коэффициент перехода
от масштаба снимка к масштабу составляемого плана, очевидно, будет равен 10, но
при обработке снимков на топокарте такой вариант возможен. Можно оценить и
ожидаемую ошибку по высоте, используя формулу: ![]() , где b
, где b
базис фотографирования в масштабе снимка (примерно 70мм). После подстановки
принятых значений получим mz=0.22м. Или в относительной мере 0.033%, что
практически в допуске. Таким образом, предлагаемые параметры
стереофототопографической съемки карьера вполне корректны и могут быть
реализованы.
7 Понятие о дистанционном
зондировании.
В последние годы бурно развиваются компьютерные
средства сбора и обработки информации. Например, уже получили большое
распространение геоиформационные технологии, ассоциирующиеся у большинства людей
с использованием программных продуктов, относящимся к географическим
информационным системам (ГИС). Но наряду с ними, в эти области активно
внедряются информационные технологии, имеющие отношение к обработке
пространственной информации: методы глобального спутникового позиционирования (GPS),
методы связанные со сбором информации в поле, на местности, с помощью
портативных компьютеров, методы, использующие дистанционное зондирование Земли
из космоса или с самолетов. С переносом всех основных операций по обработке и
использованию данных съемок на компьютеры появились специализированные пакеты
для работы с данными дистанционного зондирования.
Дистанционное зондирование – это технология, которая
требует специфических возможностей обработки, таких как многоспектральная
классификация, геометрическое трансформирование и географическая привязка
изображений. До 1992 года технология больше рассматривалась как
научно-исследовательская и поэтому некоторым образом отделялась от быстро
растущего рынка ГИС технологий. В то же время и фотограмметрия (техника
получения топографической информации по стерео изображениям) переводилась в
цифровую форму. Одна особенность является общей для этих трех областей
(дистанционного зондирования, ГИС и фотограмметрии) – это обязательное требование
иметь географически привязанную информацию. Те, кто в своих проектах опирается
на все три выше указанные технологии, программное обеспечение должны заказывать
у разных поставщиков. Для цифровой обработки снимков используется целый ряд
специализированных программных продуктов, выпущенных как российскими
производителями (Талка, Photomod, Z-Spase 29 и т.д.), так и зарубежными (TNT
Proffesional, Leika, Interdraph, Tobin, PCI, ER Mapper, RolleiMetric и проч.).
В настоящее время фотограмметрические покеты становятся частью ГИС. Цифровая
фотограмметрия опирается на успехи в развитии цифровых камер, процессоров с
параллельной обработкой данных, достижений в области построения систем
искусственного интеллекта. Важна роль цифровой корреляции изображений, так
Мировым лидером в разработке программного обеспечения для работы с
данными дистанционного зондирования (в основном речь идет об информации,
получаемой со спутников) является компания ERDAS (Earth Resources Data Analysis System). Первоначально основным источником данных
(до 90%) во всех работах были съемки видеокамерами. С приходом самолетных
цифровых сенсоров и систем качественного сканирования обычных аэроснимков,
аэрофотосъемка также стала частью дистанционного зондирования.
С реализацией версии ERDAS Imagine
8.1 первая полнофункциональная ГИС с использованием данных дистанционного
зондирования стала реальностью. Программное обеспечение ERDAS Imagine
органично соединяет цифровую фотограмметрию, дистанционное зондирование,
пространственный анализ и картографирование в векторном формате в одном пакете,
который работает как на персональных компьютерах, так и на UNIX рабочих
станциях.
Область применения программных продуктов ERDAS
охватывает различные сферы деятельности, особый интерес представляет разведка,
добыча и эксплуатация месторождений нефти и газа. Основные задачи – площадное
картирование по данным съемок и геологическая интерпретация аэро и космических
изображений, решаемые с помощью следующей комплектации продуктов Imagine:
Advantage или Professional, как базовые комплекты, с
дополнительными модулями OrthoMAX, Radar и Virtual GIS. Основными
пользователями являются нефтяные и газовые компании, организации по разведке и
добыче полезных ископаемых, по строительству и эксплуатации трубопроводов.
В целом, любые организации, занимающиеся
тематическим и топографическим дешифрированием и картированием с использованием
данных космических и аэросъемок – потенциальные пользователи программного
обеспечения ERDAS Imagine. Это программное обеспечение может применяться
в любой прикладной области, обеспечивая полный цикл использования данных
дистанционного зондирования, начиная от предварительной коррекции и
трансформирования снимков до создания по ним топографической продукции и
географических информационных систем.
IMAGINE Essentials
Essentials
– это ядро линии продуктов IMAGINE, представляет собой недорогой продукт для
картографирования. Essentials позволяет интегрировать многие растровые
форматы (такие, как GeoTIFF, ESRI GRID, ER Mapper и многие другие) наряду с векторной ГИС
информацией в единую среду для управления и работы с этими данными.
IMAGINE Advantage
Imagine Advantage
дополняет функциональность Essentials, представляя расширенные функции
картирования, обработки изображения и ГИС анализа. Дополнительные функции: ортотрансформирование
— возможности геометрического моделирования расширены,
включены геометрические модели сенсоров (стандартные аэрофотокамеры, SPOT и LANDSAT);
— задание элементов внутреннего ориентирования и
параметров камеры: координат главной точки, фокусного расстояния, координатных
меток;
— задание или автоматическое определение поправки
элементов внешнего ориентирования: углов отклонения главного луча от надира и
координат центра проектирования;
— учет кривизны Земли;
— задаваемое пользователем число итераций;
— задание выходной проекции;
— сбор опорных точек с карты, снимка, векторного слоя,
клавиатуры;
— использование полных (x,y,z)
опорных точек.
Имеются средства для генерализации поверхностей – Surface Generation
(интерполяция на регулярную модель рельефа). Этот инструмент позволяет получать
регулярную цифровую модель из точек с отметками высот и изолиний рельефа в
векторном виде и других видов данных. Расширенные функции мозаики позволяют
сливать различные виды взаимноориентированных аэро и космических изображений в
одно. На выходе мозаики могут быть получены: единый большой файл, несколько
файлов с произвольными границами или серии листов в заданной системе разграфки.
Для выравнивания контраста сливаемого изображения используются различные
алгоритмы, линии сшивки определяются автоматически или вручную по произвольной
линии или с использованием объектов векторной карты в формате ARC/INFO.
Для зон перекрытия могут быть выбраны различные варианты вычисления значений
результирующих пикселов.
Модуль расширения OrthoMAX представляет собой высокопроизводительную
цифровую фотограмметрическую систему. Основным ее назначением является
построение цифровых моделей рельефа и выполнение ортофототрансформирования.
Также возможно проведение фототриангуляции, как в пределах одиночного снимка,
так и по целому их блоку.
Фотограмметрическая подсистема OrthoMAX
обеспечивает оптимальный подход к организации процесса обработки данных,
благодаря своему удобному интерфейсу. Тем самым методы цифровой фотограмметрии
становятся доступными даже тем категориям пользователей, которые не имеют
специального фотограмметрического образования. Даже новички, используя систему OrthoMAX,
могут получить высококачественные результаты, а для опытных пользователей
имеется много расширенных возможностей, которые позволяют увеличить
производительность и качество работы в сложных ситуациях. Программа позволяет
работать с различными типами данных, с большим количеством снимков и можно
задавать необходимую точность выходного материала. Это позволяет гибко
ориентировать работу на выполнение конкретно поставленных задач.
Высокоэффективные алгоритмы, используемые для учета особенностей геометрии
сенсора, выполнения триангуляции, построения цифровой модели рельефа (ЦМР) и
ортотрансформирования, позволяют достичь субпиксельной точности. ЦМР могут
собираться как в полуавтоматическом, так и в интерактивном режиме. ЦМР может
быть получена как в виде регулярной модели рельефа (растра), так и в виде
нерегулярной триангуляционной сети (TIN). Полученная ЦМР может наблюдаться и
редактироваться в стереоскопическом режиме.
Ортооткорректированное изображение, будь то
космические или аэрофотоснимки, являются столь же точным материалом для
измерения, что и карта и свободно от значительных искажений, связанных с
рельефом местности. Это означает, что при выборе фокусного расстояния АФА (![]() ) известной формулой:
) известной формулой:
![]() ,
,
можно не руководствоваться. Это устраняет также проблемы стыковки по
краям снимков при построении мозаики. Непосредственно в процессе
ортотрансформирования можно задавать размер пиксела и выбрать нужный участок.
Оно может производиться как с использованием регулярной модели, так и типа TIN. 4.
Содержание
ОБЩИЕ
СВЕДЕНИЯ О ФОТОГРАММЕТРИИ.
1.
1 ПРЕДМЕТ ФОТОГРАММЕТРИИ, ЕЕ СОДЕРЖАНИЕ И ЗАДАЧИ.
1.
2 ФОТОТОПОГРАФИЯ И ФОТОТОПОГРАФИЧЕСКИЕ СЪЕМКИ.
1.
3 ПРИКЛАДНАЯ ФОТОГРАММЕТРИЯ.
1.
4 ИСТОРИЯ РАЗВИТИЯ ФОТОГРАММЕТРИИ.
2.
ОПТИЧЕСКИЕ И ГЕОМЕТРИЧЕСКИЕ ОСНОВЫ ФОТОГРАММЕТРИИ.
2.1
ПОСТРОЕНИЕ ИЗОБРАЖЕНИЯ В ФОТОКАМЕРЕ.
2.2. ХАРАКТЕРИСТИКА ФОТОГРАФИЧЕСКИХ ОБЪЕКТИВОВ.
2.3.
ХАРАКТЕРИСТИКА ФОТОГРАФИЧЕСКИХ МАТЕРИАЛОВ.
2.4 Принцип получения цифровых снимков
2.5
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ СНИМКА И ОРТОГОНАЛЬНАЯ ПРОЕКЦИЯ ПЛАНА.
2.6
ЭЛЕМЕНТЫ ЦЕНТРАЛЬНОЙ ПРОЕКЦИИ И ЕЕ СВОЙСТВА.
2.7
Получение снимков местности.
2.8
ТЕХНИЧЕСКИЕ СРЕДСТВА АЭРО и наземной
ФОТОСЪЕМКИ.
2.8.1
Летательные аппараты
2.8.2
Аэрофотоаппараты
2.8.3
Вспомогательное аэрофотосъёмочное оборудование.
2.8.4
Оборудование для фотографирования с земли
2.8.5
Основные характеристики фотограмметрических цифровых камер
3.
АНАЛИТИЧЕСКИЕ ОСНОВЫ ОДИНОЧНОГО СНИМКА
3.1.
СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА.
3.2.
ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКА.
3.3.
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА.
3.4.
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
3.5.
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ ГОРИЗОНТАЛЬНОГО И НАКЛОННОГО СНИМКОВ.
3.6.
МАСШТАБ СНИМКА.
3.7.
СМЕЩЕНИЕ ТОЧЕК И Искажение направлений,
ВЫЗВАННОЕ НАКЛОНОМ СНИМКА.
3.8.
СМЕЩЕНИЕ ТОЧЕК И НАПРАВЛЕНИЙ НА СНИМКЕ, ВЫЗВАННОЕ РЕЛЬЕФОМ МЕСТНОСТИ.
3.9.
ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ СНИМКА
4. Теория
пары снимков.
4.1
Стереоскопическая пара снимков и
элементы ее ориентирования
4.2 Зависимость между координитами точки
местности и координатами ее изображения на паре снимков
4.3 Элементы взаимного ориентирования пары
снимков
4.4 Уравнение взаимного ориентирования пары снимков
4.5 Определение элементов взаимного
ориентирования
4.6 Построение модели с преобразованием связок
проектирующих лучей
4.7 Внешнее ориентирование модели
4.8 Двойная обратная пространственная
фотограмметрическая засечка
4.9 Особенности теории наземной фотограмметрии
4.9.1
Основные виды наземной стереофотограмметрической съемки
5 Стереоскопическое зрение, измерение снимков
и модели.
5.1
ОСНОВЫ СТЕРЕОСКОПИЧЕСКОГО ЗРЕНИЯ.
5.2
СТЕРЕОСКОПИЧЕСКИЙ ЭФФЕКТ, простейшие
стереоприборы.
5. 3 Особенности измерения цифровых снимков
5.
3.1 Средства измерений
5.3.2
Принципы измерений
5.3.3
Механизм корреляции изображений
5.3.4
Внутреннее ориентирование снимка в системе координат цифрового изображения
5.4
ФИЗИЧЕСКИЕ ИСТОЧНИКИ ОШИБОК СНИМКА
6. Технологии фототопографических съемок
6.1 Основные технологические схемы
6.2 Стереотопографический метод АФС
6.2.1
Технологически схемы
6.2.2
Летносъемочный процесс
6.2.3
Трансформирование снимков и составление фотоплана
6.2.3.1
Общие положения
6.2.3.2
Перспективное трансформирование
6.2.4
Составление фотоплана
6.2.5
Понятие о привязке снимков.
6.2.6
фототриангуляция
6.2.6.1
Основные понятия
6.2.6.2
Аналитическая маршрутная фототриангуляциа
6.2.6.3
Понятие о блочной фототриангуляции
6.2.6.4
Деформация модели и точность построения фотограмметрической сети
6.2.7
Понятие о топографическом дешифрировании снимков
6.2.8
Технологии, основанные на обработке фотоснимков
6.2.8.1
Классификация универсальных аналоговых стереоприборов
6.2.8.2
Оптические универсальные аналоговые стереоприборы
6.2.8.3
Универсальные приборы механического типа
6.2.8.4
Составление планов на СПР
6.2.8.5
Другие приборы механического типа
6.2.8.6
Ортофототрансформирование
6.2.8.7
Автоматизация обработки снимков на фотограмметрическом оборудовании
6.2.8.8
Понятие об универсальных стереоприборах аналитического типа
6.2.9
Особенности цифрового трансформирования и составления фотоплана
6.2.9.1 Назначение
и области применения цифрового трансформирования снимков
6.2.9.2 Создание
цифровых фотопланов
6.2.9.3
Точности цифровых трансформированных фотоснимков и фотопланов
6.2.10
Основные сведения о векторизации
6.2.11 Построение
цифровых моделей
6.2.12 Особенности
основных отечественных фотограмметрических станций
6.2.12.1
Пакет PHOTMOD SP
6.2.12.2 Пакет
PHOTMOD AT
6.2.12.3 Талка
6.2.12.4 ЦФС (Digitals/Delta)
6.3 Комбинированный метод АФС
6.4 Особенности аэрофототопографической съемки
карьеров
7 Понятие о дистанционном зондировании.