Форум РадиоКот • Просмотр темы — Частотный преобразователь m63
Сообщения без ответов | Активные темы
| ПРЯМО СЕЙЧАС: |
| Автор | Сообщение | ||
|---|---|---|---|
|
|
Заголовок сообщения: Частотный преобразователь m63
|
||
Зарегистрирован: Пт апр 22, 2011 00:14:21 Рейтинг сообщения: 0 |
Вроде как описание было где-то на этом сайте, но не смог снова никак найти( Не додумался скачать себе все( |
||
| Вернуться наверх |
Профиль |
||


| Реклама | |
|
DJINO |
Заголовок сообщения: Re: Частотный преобразователь m63
|
|
Карма: 4 Рейтинг сообщений: 15
Зарегистрирован: Пн сен 07, 2009 14:32:04 Рейтинг сообщения: 0 |
Кажется здесь найдешь то, что тебе нужно: http://moemesto.ru/miron63 . |
| Вернуться наверх | |
| Реклама | |
|
|
|

|
Professor_X-16 |
Заголовок сообщения: Re: Частотный преобразователь m63
|
||
Зарегистрирован: Пт апр 22, 2011 00:14:21 Рейтинг сообщения: 0 |
Спасибо) но немного жаль, что более развернутого описания нет( |
||
| Вернуться наверх | |||
|
michman2 |
Заголовок сообщения: Re: Частотный преобразователь m63
|
|
Зарегистрирован: Пт дек 04, 2020 04:13:56 Рейтинг сообщения: 0 |
доброго времени. |
| Вернуться наверх | |
| Реклама | |
|
|
Как выбрать батарейки для IoT-устройств – обзор эксперта Как выбрать химические источники тока (ХИТ, батарейки) для устройств промышленного и бытового интернета вещей? В чем различие критериев выбора и ключевых параметров? Какие изделия популярных брендов FANSO и POWER FLASH удовлетворяют этим критериям? Подробнее>> |
Кто сейчас на форуме |
|
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 3 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |

Посчитать резистор будет довольно сложно, поскольку это индивидуально для каждого двигателя (мощность, обороты, индуктивность обмоток, инерционность механики и т. д.). Лучше ставить помощнее и проволочный, тем более, что в нашем случае мощность невелика и время выбега, соответственно, тоже. Я тоже присматривался к этой микрухе, не понравилось, что дорогая, сабака, не хочется с такой экспериментировать. Мне больше нравится это http://arv.radioliga.com/index.php?option=…4&Itemid=44
копеечная конструкция, нефиг делать состыковать ее с той же ИР2130, одн беда — аффтар заморозил проект, говорит, что есть более совершенная конструкция, но, типа, не готова к публикации (может хочет ее коммерческой сделать). А в том виде, что есть — малый диапазон регулировки частот (5-50 Гц). И исходник прошивки не дает, можно было бы самому константы поменять. А так, вещь, я так подсчитал, примерно, вся конструкция выйдет где-то до 20 уев.
Кстати, вариант этой же схемы
И печатная плата к ней. За правильность не отвечаю, не мое, взято здесь http://kazus.ru/foru…ic_7978-40.html

Изменено 30.11.2011 08:29 пользователем Юрий Кимборович
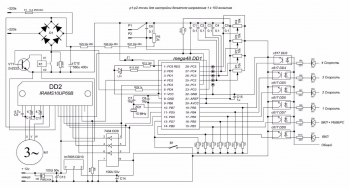
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200Гц
- Скорость набора частоты 5-50Гц в секунду
- Скорость снижения частоты 5-50Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750вт, но крутит и 1.1кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса .
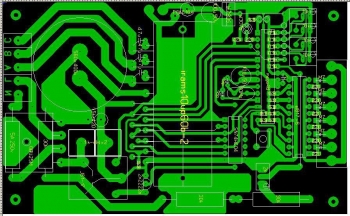
Проект в layout
Ниже фото того, что у меня получилось
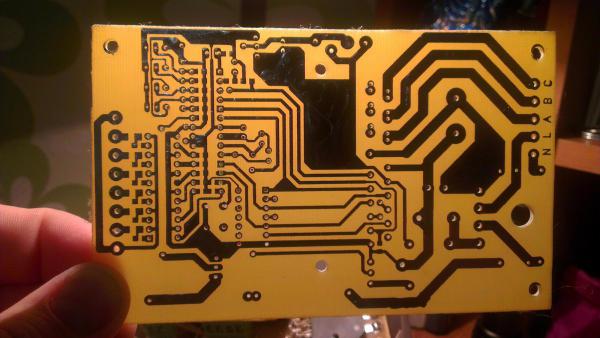
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа) .
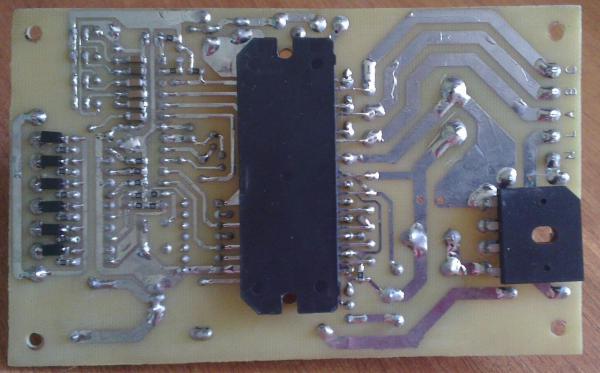
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220в 50Гц). Скорость набора частоты установлена на уровне 15Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200Гц., 1v-40Гц, 1.25v-50Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки маштабирования напряжения DC звена 1в -100в (на схеме R30).
Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО!!!!….На этом настройка завершена…
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220В и частотой 50Гц), так и для двигателя с напряжением 380в и частотой 50гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220в 50Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того …………………….светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220В — 50Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220В- 30Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200Гц /220 то резистор нужно выкрутить на максимум; если написано 100Гц/ 220в нужно добиться 2.5 Вольта на 1-ом контакте. (1Вольт на первом контакте соответствует 40Гц); если на двигателе написано 50Гц/400В то нужно выставить 27Гц/0,68 В (например:(50/400)*220=27Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25Гц — 200Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать!!!! Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220в 50Гц с вольт добавкой в 10 % .
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50Гц , номинальное напряжение 80В, Чтобы узнать какая будет номинальная частота при 220В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50Гц одной фазы (на 3-х фазах зависает комп )
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50Гц 220В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 КВт.
Главное у данного модуля: ток короткого замыкания 140А против 47А, защита настроена на уровне 25А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20МГц, то привод получится 10-400Гц; темп разгона 10-100Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380В 50Гц, а настройки для 220В 50Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
В свободном доступе прошивке не будет, НО запрограммированный контролер ATmega48-10pu или ATmega48-20pu будет дешевле mc3phac. Готов ответить на все ваши вопросы.
Заказ прошитого контроллера
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| DD1 | МК AVR 8-бит |
ATmega48 |
1 | Поиск в магазине Отрон | В блокнот | |
| DD2 | Микросхема | IRAMS10UP60B | 1 | Поиск в магазине Отрон | В блокнот | |
| DD3-DD8 | Оптопара |
PC817 |
6 | Поиск в магазине Отрон | В блокнот | |
| DD9 | ИС буфера, драйвера |
SN7404 |
1 | Поиск в магазине Отрон | В блокнот | |
| DD10 | Линейный регулятор |
LM7805 |
1 | Поиск в магазине Отрон | В блокнот | |
| VT1 | Биполярный транзистор |
2N2222 |
1 | Поиск в магазине Отрон | В блокнот | |
| D1 | Диодный мост | 1 | Поиск в магазине Отрон | В блокнот | ||
| D2-D7 | Диод | m7 | 6 | Поиск в магазине Отрон | В блокнот | |
| D8 | Защитный диод |
P6KE16A |
1 | Поиск в магазине Отрон | В блокнот | |
| LD1 | Светодиод | 1 | Поиск в магазине Отрон | В блокнот | ||
| С1-С6 | Конденсатор | 0.1 мкФ | 6 | Поиск в магазине Отрон | В блокнот | |
| С7, С8 | Конденсатор | 18 пФ | 2 | Поиск в магазине Отрон | В блокнот | |
| С9-С11 | Конденсатор | 4.7 мкФ | 3 | Поиск в магазине Отрон | В блокнот | |
| С12 | Электролитический конденсатор | 560 мкФ 400 В | 1 | Поиск в магазине Отрон | В блокнот | |
| С13, С14 | Электролитический конденсатор | 100 мкФ 50 В | 2 | Поиск в магазине Отрон | В блокнот | |
| С15 | Конденсатор | 1 мкФ | 1 | Поиск в магазине Отрон | В блокнот | |
| Р1-Р4 | Переменный резистор | 10 кОм | 4 | Поиск в магазине Отрон | В блокнот | |
| Р5 | Переменный резистор | 2 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R5-R10 | Резистор |
220 Ом |
6 | Поиск в магазине Отрон | В блокнот | |
| R12, R16-R22, R28 | Резистор |
1.8 кОм |
9 | Поиск в магазине Отрон | В блокнот | |
| R13 | Резистор |
300 Ом |
1 | Поиск в магазине Отрон | В блокнот | |
| R23 | Резистор |
2 кОм |
1 | 8 Вт | Поиск в магазине Отрон | В блокнот |
| R24 | Резистор |
47 кОм |
1 | Поиск в магазине Отрон | В блокнот | |
| R25-R27 | Резистор |
30 кОм |
3 | 2 Вт | Поиск в магазине Отрон | В блокнот |
| R29 | Резистор |
1 кОм |
1 | Поиск в магазине Отрон | В блокнот | |
| ZQ1 | Кварцевый резонатор | 10 МГц | 1 | Поиск в магазине Отрон | В блокнот | |
| F1 | Предохранитель | 5 А 250 VAC | 1 | Поиск в магазине Отрон | В блокнот | |
| К1 | Реле | 1 | Поиск в магазине Отрон | В блокнот | ||
| J1 | Джампер | 1 | Поиск в магазине Отрон | В блокнот | ||
| В1 | Выключатель | 1 | Поиск в магазине Отрон | В блокнот | ||
| М1 | 3-х фазный двигатель | 1 | Поиск в магазине Отрон | В блокнот | ||
| Добавить все |
Скачать список элементов (PDF)
Теги:
Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора. Преобразователь частоты легко решает эту задачу.
Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой. Сегодня такие устройства делают разные заводы, но многие умельцы своими руками изготавливают не хуже.
Содержание
- Как я сам изготовил частотный преобразователь
- Как сделать инвертор самому своими руками?
- Для чего предназначен инвертор — его принцип действия
- Как регулировать скорость инвертором?
- Из чего состоит привод регулирования?
- Режим управления частотников
- Как подключить инвертор треугольником и звездой?
- Применение инверторов нового поколения
Как я сам изготовил частотный преобразователь
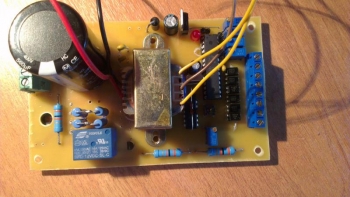
Я изготовил преобразователь частоты и асинхронный привод для моего товарища. Ему нужен был привод для пилорамы, мощный и хороший. Так как я любил заниматься электроникой, то сразу предложил ему такую схему:
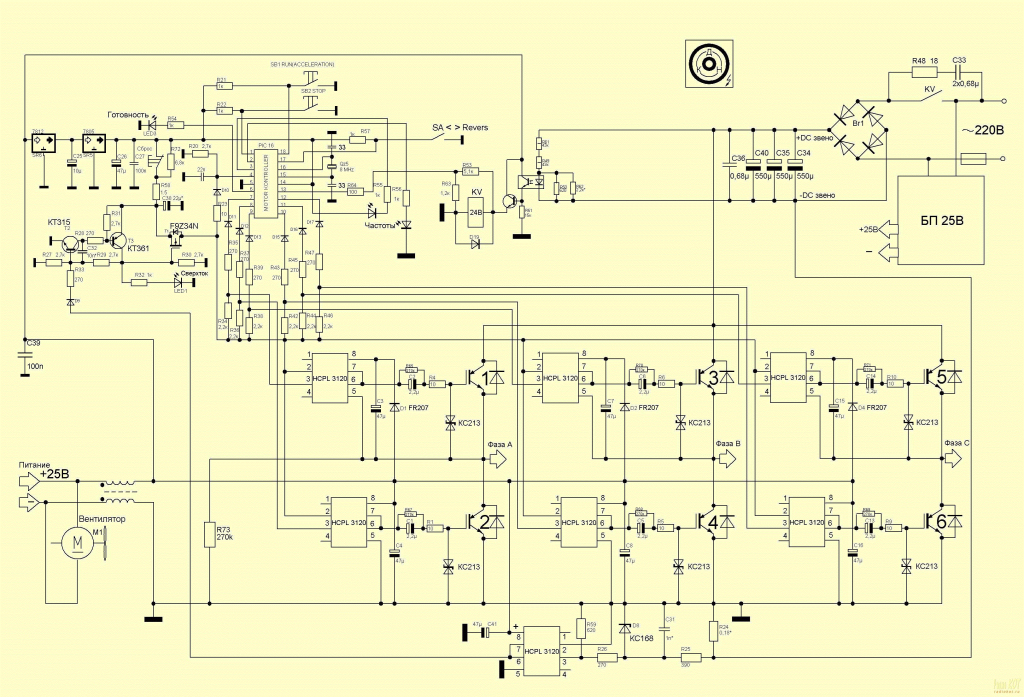
Трехфазный мост на транзисторах с диодами обратной связи я использовал, которые имелись. Управление осуществил через оптодрайвер HCPL 3120 микроконтроллером PIC16F628A. У входа припаял гасящую емкость, чтобы электролиты заряжались плавно. Затем припаял шунтовое реле. Еще установил триггер защиты тока от замыкания и перегрузки. Для управления установил две кнопки и выключатель для обратного вращения.
Силовую часть я собрал на навесном монтаже.
Резисторы, соединил параллельно по 270 кОм с помощью затворных проходных конденсаторов, позади платы их напаял. Моя плата показана на внешнем виде:

Вид этой моей платы с другой стороны:

Для подключения питающего напряжения я собрал блок питания, работающий на импульсах, обратноходовой. Вот привожу схему этого блока питания:

Как я запрограммировал микроконтроллер? Простые моргалки для меня не представляли какой-то проблемы. Получились константы в виде матрицы, над которой работал мой контроллер. Частота и напряжение были заданы этими величинами. Всю схему работы проверил на моторчике вентилятора небольшой мощности, 200 Вт. Эта моя конструкция выглядела так:

Начальные эксперименты дали хороший результат. Затем доработал программу. Раскрутил двигатель на 4 кВт, и пошел собирать управление пилорамой.
При монтаже у нас с товарищем случайно произошло замыкание и сработала защита, проверили ее работу. Мотор на 2 кВт 1500 оборотов с легкостью пилил доски. Сейчас программа еще дорабатывается для раскрутки двигателя выше номинала. Характеристики: частота от 2 до 50 герц с шагом 1,5 герц, синхронная частота, постоянно меняется, разбег от 1500 до 3500 герц, управление скалярного типа U/F, мощность мотора до 5 кВт.
Удерживаем кнопку RUN и разгоняем двигатель. Отпускаем, частота держится на уровне. Когда загорается светодиод, то привод готов к запуску.
Как сделать инвертор самому своими руками?
Вместе с производством заводских инверторов любители делают их сами, своими руками. Здесь нет ничего сложного. Такой преобразователь частоты преобразовывает одну фазу, делает из нее три фазы. Электродвигатель с похожим частотником используют в домашних условиях, мощность его не будет теряться.

Блок выпрямления в схеме расположен в начале. Далее идут фильтры, которые отсекают токовые переменные. Чтобы изготовить данные инверторы применяют транзисторы IGBT.
За тиристорами стоит будущее, хотя и в настоящем они уже применяются давно. Купленный частотник на биполярных транзисторах стоит дорого и мало где применяется (сервоприводы, металлорежущие станки с векторным управлением). Эти приводы как транспортеры и конвейеры, карусельные станки, станции подкачки воды, климатические системы управления — это большая часть от всего применения устройств заводов, где лучше использовать частотники для управления электромоторами с короткозамкнутыми якорями и можно делать управление оборотами двигателя, если подать потенциал, изменяя частоту до 50 герц.
Приведем простые примеры частотных преобразователей, которые тянули мощные электродвигатели тепловозов и электричек, имеющих в своем составе много вагонов товарных платформ, большие станции с насосами напряжением 600 вольт, обеспечивающие городские районы питьевой водой. Очевидно, что данные сильные электродвигатели не подойдут на биполярных транзисторах. Поэтому применяют активные тиристоры типа GTO, GCT, IGCT и SGCT. Они преобразуют из постоянного тока токовую сеть с тремя фазами с хорошей мощностью. Однако, имеются простые схемы на тиристорах простого типа, закрывающиеся током катода обратного. Такие тиристоры не будут действовать в режиме ШИМ, их хорошо применяют в прямой регулировке электромоторов, без тока постоянного размера. Преобразователи частоты на тиристорах в застойные времена были задействованы для моторов на постоянном токе. Фирма Сименс изобрела векторные частотники, преобразившие промышленность до неузнаваемости.
Стоимость всех деталей самодельного инвертора существенно ниже цены заводского устройства.
Такие самодельные устройства хорошо подходят для электромоторов мощностью до 0,75 кВт.
Для чего предназначен инвертор — его принцип действия
Инвертор действует на частоту вращения асинхронных моторов. Моторы переделывают электроэнергию в механическое движение. Вращательное движение преобразуется в движения механические. Это создает большое удобство. Асинхронные моторы очень популярны во многих сторонах жизни людей.
Обороты электродвигателя можно изменять и другими устройствами. Но, у них много недостатков. Они сложны в пользовании, дорого стоят, работают с плохим качеством, разбег регулировки маленький.
Частотный преобразователь для мотора с тремя фазами легко решает эту проблему. Все знают, что пользование частотниками для изменения частоты вращения есть самый хороший и правильный метод. Такой аппарат дает мягкий пуск и торможение, а также контролирует многие процессы, происходящие в моторе. Аварийные ситуации при этом сводятся на нет.

Чтобы плавно и быстро регулировать работу двигателя, специалисты разработали специальную электрическую схему. Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Коэффициент полезного действия его достигает 98%. Это происходит за счет повышения частоты коммутации. Механические устройства не могут выполнить такие функции.
Как регулировать скорость инвертором?
Как частотник может изменять частоту вращения трехфазного электромотора? Сначала он меняет напряжение сетевое. Далее, из него получается нужная амплитуда и частота напряжения, поступает на электромотор.
Разбег интервала регулирования скорости преобразователем большой. Можно изменять вращение мотора в другую сторону. Чтобы двигатель не вышел из строя, нужно брать во внимание данные из его характеристики, допускаемые обороты, мощность.
Из чего состоит привод регулирования?

Он имеет в составе три звена:
- выпрямитель, дающий потенциал постоянного тока при включении к питанию электрической сети. Сеть может быть управляемой или нет;
- фильтрующий элемент, который сглаживает выходное напряжение (применяется емкость);
- инвертор, который производит нужную частоту потенциала, крайнего звена возле электромотора.
Режим управления частотников
Их делят на виды управления оборотами двигателя:
- скалярное управление (нет связи с обратной стороны);
- режим векторного управления (связь с обратной стороны имеется, или отсутствует).
В первом случае управляется статор с его магнитным полем. Управление вектором учитывает действие полей магнита ротора и статора, улучшается крутящий момент при разных скоростях вращения. Это и есть основное различие их режимов управления.
Способ векторов точнее и эффективнее. Обслуживать его дороже. Он больше подходит для специалистов с хорошими профессиональными умениями и знаниями. Метод управления скалярного типа наиболее прост в работе. Применяется он с выходными параметрами, не требующими регулировки особой точности.
Как подключить инвертор треугольником и звездой?
Когда мы купили инвертор по недорогой цене, то возникает необходимость: подключение его к электромотору самому без специалистов. Сначала надо установить для безопасности автоматический выключатель для обесточивания. Если возникнет короткое замыкание на фазах, то отключится вся система.
Подключить частотник к мотору можно звездой или треугольником.

Когда привод регулирования с одной фазой, то контакты электромотора присоединяют треугольником. Тогда мощность не потеряется. Мощность этого преобразователя частоты будет не более 3 кВт.
Инверторы с тремя фазами технически наиболее современны. Они питаются от заводских трехфазных сетей, подключаются звездой.
Для ограничения тока пуска и уменьшения момента пуска при пуске электромотора свыше 5 кВт можно использовать способ включения треугольник и звезда.
При включении статора применяется схема звезды, а если обороты двигателя нормальные, то переходят на вариант треугольника. Но это используется при существовании возможности соединения по двум схемам.
Отмечаем, что в варианте звезда-треугольник большие перепады тока будут всегда. При переключении на вторую схему обороты двигателя сильно снизятся. Для восстановления скорости вращения надо повысить силу тока.
Большой применяемостью оказывают пользу частотники для моторов мощностью до 8 кВт.
Применение инверторов нового поколения
Современные частотные преобразователи делаются с применением таких устройств как микроконтроллеры. Это значительно повышает функции инверторов в алгоритмах управления и контролирования с точки зрения безопасности работ.
Частотники имеют успешное применение в областях производства:
- в водоснабжении, снабжении теплом при изменении скорости подачи помпы холодного и горячего водоснабжения;
- в заводских условиях машиностроения;
- в легкой и текстильной промышленности;
- в энергетике и производстве топлива;
- для насосов канализации и скважин;
- в технологических процессах для автоматики управления.
Чтобы управлять и контролировать частотники изготовитель прибора предлагает созданную программу, которая будет всегда иметь связь с контроллером посредством порта, будет показывать на мониторе состояние и позволит производить управление. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Данные обмениваются в три этапа:
- Идентификация.
- Инициализация.
- Управление и контроль.
Стоимость блоков питания бесперебойного напряжения имеет зависимость от того, есть ли в нем частотный преобразователь. За такими устройствами будущее. Отрасли экономики и энергетики будут быстрее развиваться благодаря новым современным устройствам.
Идея самодельного частотника не нова, для тех кто знаком с силовой электроникой сделать в принципе не сложно. Самая сложная, силовая часть, сейчас доступна в виде модуля, в котором часто есть защиты и цена таких модулей начинается от 10 долл.
У меня давно была идея сделать примитивный частотник, для использования в простых местах, где обычно используются пусковые конденсаторы. К примеру: точило, настольный сверлильный, подача фрезера, станция сож…. Хотелось максимальной простоты использования, никакой возни с проводами управления, настройками и.т.д.. Тоесть, должен быть режим, когда при включении в сеть сразу начинается вращение мотора.
Силовая схема реализованна по рекомендациям из даташита модуля IKCM15F60. Управление на STM32F051. Гальванической изоляции нету. Тормозной резистор 15Вт, может поглощать около 1 КВт мощности с мотора. Он используется в том числе и для плавного запуска частотника.
Закладывались следующие параметры:
1)Мощность порядка 1Квт
2)Максимально компактный и недорогой по себистоимости, но не в ущерб надежности.
3) Простое скалярное управление, защита по току и перенапряжению.
4) Возможность управления либо по внешним вводам, либо автономно при подачи питания.
5) Из параметров, максимальная/минимальная частота, частота без внешнего задатчика, время разгона/торможения, время и напряжения тормоза пост.тока. Также, режимы работы.
6) Все параметры должны настравиватся через смартфон, единственное устройство индикации частотника — светодиод.
7) Должна быть возможность примитивной диагностики через смартфон, такой как — ток мотора, сетевое напряжение, температура модуля…
Тормозной резистор встроенный, не предназначен для частых торможений большой инерции, поэтому может быть компактным.
На данный момент готова уже вторая версия, в схеме обнаружил только 1 недочет, не хватало конденсатора на выводе защиты модуля. Внешний вид:


Размеры платы 99х99, такой размер можна заказать в Китае по цене 2$шт. Для управления параметрами используется терминал программа для Андроид, Bluetooth дает гальваническую изоляцию. Корпус на данный момент не предусматривается.
Видео разгона и торможения 1.5Квт мотора с 160-мм патроном для нагрузки
Себестоимость всех компонетов частотника не считал, примерно 40-50$. Насколько мне известно, самый дешевый китайский частотник 1КВт стоит 70$, на счет его надежности и грамотности исполнения ничего не знаю. Опять же, доставка из Китая… Вроде как есть даже коммерческая перспективность.
Плюсом данной контрукции вижу удобную настройку через телефон, а так же возможность сделать конкретно те функции, которые наиболее удобны в домашнем использовании.
Современные частотные преобразователи совмещают функции управления и защиты электродвигателя. При ненормальных режимах работы, авариях, преобразователь:
- Экстренно отключает электродвигатель (торможение осуществляется выбегом).
- Плавно тормозит привод.
- Запрещает запуск двигателя.
При этом сообщение с кодом неисправности выводится на дисплей устройства и фиксируется в запоминающем устройстве. При наличии комплексной системы автоматизации и телемеханики, аварийный сигнал подается на удаленный пункт управления и центральный процессор.
Причинами остановки электродвигателя могут быть:
- Поломки преобразователя частоты.
- Неисправности электропривода или оборудования.
- Аварии в сети.
Большинство частотных преобразователей имеют функцию самодиагностики, которая позволяет определить причину аварийной остановки. Ошибки разделяются на внутренние и внешние. Последние связаны с неисправностями двигателя, авариями сети. Внутренние ошибки говорят о неисправностях преобразователя или неправильных настройках.

Типовые неисправности
Перегрев
При повышении температуры частотного преобразователя выше допустимого значения, на дисплей устройства выводится сообщение OH (Over Heat) или цифровой код ошибки. Перегрев может быть связан с ошибками монтажа, неисправностями встроенного или внешнего вентилятора, неправильным выбором мощности.
При появлении такого сообщения необходимо выяснить причины, даже если перегрев не привел к остановке привода. Конденсатор в звене постоянного тока, силовые транзисторы чувствительны к повышению температуры. Перегрев приводит к пробою элементов преобразователя.
Прежде необходимо проверить правильность выбора по мощности. Если ток нагрузки превышает допустимые значение выходного тока преобразователя, частотник необходимо заменить на более мощный.
Также нужно проверить состояние внутренних вентиляторов охлаждения. При необходимости сделать их чистку или замену. При размещении преобразователя в шкафу управления, нужно обеспечить достаточное охлаждение преобразователя. Проблема решается установкой дополнительного вентилятора или переносом частотного преобразователя в место с достаточной циркуляцией воздуха.
Низкое напряжение
При снижении напряжения на входе преобразователя или в звене постоянного тока, на дисплее появляется сообщение LV (Low Voltage). Причинами могут быть:
- Пуск мощного оборудования, подключенного к одной линии с частотно-регулируемым приводом.
- Обрыв фазы на входе.
- Неправильное подключение.
- Поломки устройств, включенных в цепь перед частотным преобразователем.
При провале напряжения, вызванного включением мощного электрооборудования, требуется подключить привод, регулируемый преобразователем, к другой линии. Также нужно проверить правильность подключения, напряжение на всех фазах, при необходимости устранить обрыв. При ослаблении контактов силовой цепи, необходимо зачистить контактные группы и подтянуть винтовые клеммы. Для выявления неисправностей дополнительных устройств необходимо измерить напряжение до и после них. При наличии отклонений отремонтировать или заменить оборудование.
Превышение напряжения
Рост напряжения в звене постоянного тока обычно возникает при резком торможении электродвигателя. При этом на дисплей выводится цифровой код ошибки или сообщение OV (Over Voltage). Проблема решается увеличением времени торможения или подключением тормозного резистора. Такая ошибка может быть вызвана неисправностью узла измерения напряжения. В этом случае требуется диагностика и ремонт преобразователя.
Перегрузка
При превышении тока на выходе преобразователя, на дисплее высвечивается сообщение OC (Over Current) или OL (Over Load). Это может быть вызвано:
- Замыканием в обмотках двигателя или в выходной цепи.
- Превышением допустимой нагрузки на валу.
- Перегрузкой при торможении или разгоне.
При этом необходима диагностика электродвигателя, изменение режима работы оборудования.
Важно!Коды ошибок дают приблизительную оценку неисправностей. При авариной остановке или запрете пуска требуется детальная диагностика.

Прежде всего необходимо проверить условия эксплуатации, исправность двигателя, датчиков и другого внешнего оборудования, проанализировать режимы работы электропривода.
Большинство проблем с частотно-регулируемым приводом можно решить устранением поломок внешних устройств, изменением настроек или обеспечением требуемых условий функционирования устройств.
При появлении сообщений о внутренних неисправностях нужен демонтаж, тестирование и ремонт преобразователя частоты.
Диагностика преобразователя частоты
Для диагностики и ремонта преобразователей частоты необходимо специальное оборудование:
- Электродвигатель с требуемыми параметрами. Для тестирования преобразователя в фактических условиях эксплуатации необходим двигатель с нужными характеристиками.
- Преобразователь напряжения 220, 380, 660 В, 50-60 Гц. Устройство нужно для электропитания преобразователя.
- Многофункциональный электроизмерительный прибор. Устройство необходимо для определения параметров полупроводниковых элементов, прозвонки внутренних цепей преобразователя.
- Источник дискретных и аналоговых сигналов. Оборудование нужно для тестирования блока управления и контроллера. Устройство имитирует сигналы с датчиков технологических параметров. В ходе диагностики таким оборудованием проверяют реакцию привода на управляющие сигналы.
- Осциллограф. Прибор служит для тестирования параметров ШИМ-модулятора.
Диагностику выполняют в следующем порядке. В начале анализируют сообщения об ошибках в журнале событий. Это дает представление о возможных неисправностях.
Далее проверяют контактные соединения. Неплотный контакт проводников, неправильное подключение – наиболее вероятные причины запрета пуска или появления ошибок.
Затем тестируют программное обеспечение и корректность настроек. Производители поставляют пакет диагностических программ, позволяющих выявить ошибки ПО. Для этого их устанавливают на ПК, подключают к компьютеру преобразователь частоты.
При корректно работающих программах, отсутствии ошибок при подключении, преобразователь разбирают, прозванивают цепи, выполняют диагностику элементной базы силового и управляющего блока. Все выявленные неисправности устраняют. При необходимости чистят или заменяют внутренние вентиляторы охлаждения. Далее собирают устройство, тестируют его на холостом ходу без нагрузки. Затем подключают преобразователь к двигателю и генератору аналоговых и дискретных сигналов, проверяют ПЧ во всех режимах работы.
Для проведения диагностики и ремонта ПЧ требуется соответствующая квалификация, специализированное оборудование и программное обеспечение.
Если проблема не вызвана неправильным подключением, неполадками внешних устройств и двигателя, ошибками при монтаже, следует обратиться в сервисный центр производителя.
Материалы вебинара «Источники питания MORNSUN: новинки для промавтоматики и оптимальные решения для телекоммуникации»
25 мая компания КОМПЭЛ провела вебинар, посвященный новой продукции MORNSUN для промышленной автоматизации и телекоммуникационных приложений. На вебинаре были представлены источники питания на DIN-рейку класса High-End для применения в ответственных областях, безвентиляторные ИП для жестких условий эксплуатации, модули UPS и резервирования.
Также было рассмотрено, как и на базе каких компонентов можно реализовать питание в телекоммуникационных и промышленных устройствах от шины до точки нагрузки (PoL) и показано, почему использование продукции MORNSUN выгодно в нынешних экономических условиях.
Подробнее>>
Посчитать резистор будет довольно сложно, поскольку это индивидуально для каждого двигателя (мощность, обороты, индуктивность обмоток, инерционность механики и т. д.). Лучше ставить помощнее и проволочный, тем более, что в нашем случае мощность невелика и время выбега, соответственно, тоже. Я тоже присматривался к этой микрухе, не понравилось, что дорогая, сабака, не хочется с такой экспериментировать. Мне больше нравится это http://arv.radioliga.com/index.php?option=…4&Itemid=44
копеечная конструкция, нефиг делать состыковать ее с той же ИР2130, одн беда — аффтар заморозил проект, говорит, что есть более совершенная конструкция, но, типа, не готова к публикации (может хочет ее коммерческой сделать). А в том виде, что есть — малый диапазон регулировки частот (5-50 Гц). И исходник прошивки не дает, можно было бы самому константы поменять. А так, вещь, я так подсчитал, примерно, вся конструкция выйдет где-то до 20 уев.
Кстати, вариант этой же схемы
И печатная плата к ней. За правильность не отвечаю, не мое, взято здесь http://kazus.ru/foru…ic_7978-40.html
Изменено 30.11.2011 08:29 пользователем Юрий Кимборович
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200Гц
- Скорость набора частоты 5-50Гц в секунду
- Скорость снижения частоты 5-50Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750вт, но крутит и 1.1кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса .
Проект в layout
Ниже фото того, что у меня получилось
Печатная плата данного девайса (доступна в lay под утюг)
На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа) .
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220в 50Гц). Скорость набора частоты установлена на уровне 15Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
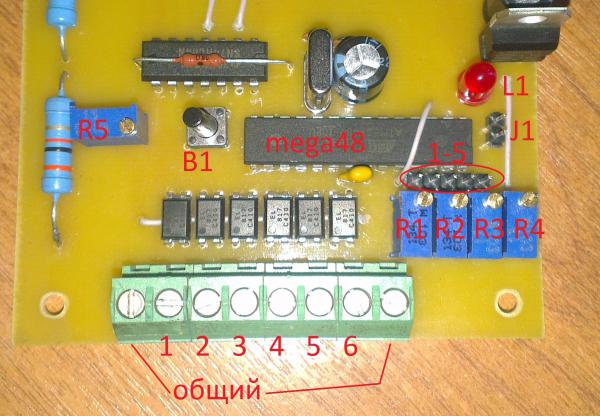
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200Гц., 1v-40Гц, 1.25v-50Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки маштабирования напряжения DC звена 1в -100в (на схеме R30).
Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО!!!!….На этом настройка завершена…
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220В и частотой 50Гц), так и для двигателя с напряжением 380в и частотой 50гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220в 50Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того …………………….светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220В — 50Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220В- 30Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200Гц /220 то резистор нужно выкрутить на максимум; если написано 100Гц/ 220в нужно добиться 2.5 Вольта на 1-ом контакте. (1Вольт на первом контакте соответствует 40Гц); если на двигателе написано 50Гц/400В то нужно выставить 27Гц/0,68 В (например:(50/400)*220=27Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25Гц — 200Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать!!!! Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
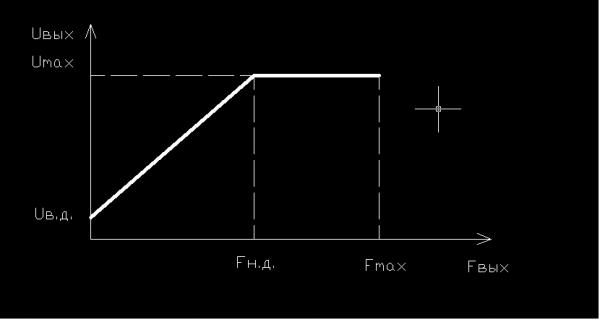
Ниже представлена вольт-частотная характеристика устройства для двигателя 220в 50Гц с вольт добавкой в 10 % .
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50Гц , номинальное напряжение 80В, Чтобы узнать какая будет номинальная частота при 220В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
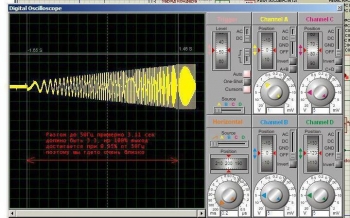
Симуляция в протеусе разгон 0-50Гц одной фазы (на 3-х фазах зависает комп )
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50Гц 220В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 КВт.
Главное у данного модуля: ток короткого замыкания 140А против 47А, защита настроена на уровне 25А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20МГц, то привод получится 10-400Гц; темп разгона 10-100Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380В 50Гц, а настройки для 220В 50Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
В свободном доступе прошивке не будет, НО запрограммированный контролер ATmega48-10pu или ATmega48-20pu будет дешевле mc3phac. Готов ответить на все ваши вопросы.
Заказ прошитого контроллера
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| DD1 | МК AVR 8-бит |
ATmega48 |
1 | Поиск в магазине Отрон | В блокнот | |
| DD2 | Микросхема | IRAMS10UP60B | 1 | Поиск в магазине Отрон | В блокнот | |
| DD3-DD8 | Оптопара |
PC817 |
6 | Поиск в магазине Отрон | В блокнот | |
| DD9 | ИС буфера, драйвера |
SN7404 |
1 | Поиск в магазине Отрон | В блокнот | |
| DD10 | Линейный регулятор |
LM7805 |
1 | Поиск в магазине Отрон | В блокнот | |
| VT1 | Биполярный транзистор |
2N2222 |
1 | Поиск в магазине Отрон | В блокнот | |
| D1 | Диодный мост | 1 | Поиск в магазине Отрон | В блокнот | ||
| D2-D7 | Диод | m7 | 6 | Поиск в магазине Отрон | В блокнот | |
| D8 | Защитный диод |
P6KE16A |
1 | Поиск в магазине Отрон | В блокнот | |
| LD1 | Светодиод | 1 | Поиск в магазине Отрон | В блокнот | ||
| С1-С6 | Конденсатор | 0.1 мкФ | 6 | Поиск в магазине Отрон | В блокнот | |
| С7, С8 | Конденсатор | 18 пФ | 2 | Поиск в магазине Отрон | В блокнот | |
| С9-С11 | Конденсатор | 4.7 мкФ | 3 | Поиск в магазине Отрон | В блокнот | |
| С12 | Электролитический конденсатор | 560 мкФ 400 В | 1 | Поиск в магазине Отрон | В блокнот | |
| С13, С14 | Электролитический конденсатор | 100 мкФ 50 В | 2 | Поиск в магазине Отрон | В блокнот | |
| С15 | Конденсатор | 1 мкФ | 1 | Поиск в магазине Отрон | В блокнот | |
| Р1-Р4 | Переменный резистор | 10 кОм | 4 | Поиск в магазине Отрон | В блокнот | |
| Р5 | Переменный резистор | 2 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R5-R10 | Резистор |
220 Ом |
6 | Поиск в магазине Отрон | В блокнот | |
| R12, R16-R22, R28 | Резистор |
1.8 кОм |
9 | Поиск в магазине Отрон | В блокнот | |
| R13 | Резистор |
300 Ом |
1 | Поиск в магазине Отрон | В блокнот | |
| R23 | Резистор |
2 кОм |
1 | 8 Вт | Поиск в магазине Отрон | В блокнот |
| R24 | Резистор |
47 кОм |
1 | Поиск в магазине Отрон | В блокнот | |
| R25-R27 | Резистор |
30 кОм |
3 | 2 Вт | Поиск в магазине Отрон | В блокнот |
| R29 | Резистор |
1 кОм |
1 | Поиск в магазине Отрон | В блокнот | |
| ZQ1 | Кварцевый резонатор | 10 МГц | 1 | Поиск в магазине Отрон | В блокнот | |
| F1 | Предохранитель | 5 А 250 VAC | 1 | Поиск в магазине Отрон | В блокнот | |
| К1 | Реле | 1 | Поиск в магазине Отрон | В блокнот | ||
| J1 | Джампер | 1 | Поиск в магазине Отрон | В блокнот | ||
| В1 | Выключатель | 1 | Поиск в магазине Отрон | В блокнот | ||
| М1 | 3-х фазный двигатель | 1 | Поиск в магазине Отрон | В блокнот | ||
| Добавить все |
Скачать список элементов (PDF)
Теги:
Идея самодельного частотника не нова, для тех кто знаком с силовой электроникой сделать в принципе не сложно. Самая сложная, силовая часть, сейчас доступна в виде модуля, в котором часто есть защиты и цена таких модулей начинается от 10 долл.
У меня давно была идея сделать примитивный частотник, для использования в простых местах, где обычно используются пусковые конденсаторы. К примеру: точило, настольный сверлильный, подача фрезера, станция сож…. Хотелось максимальной простоты использования, никакой возни с проводами управления, настройками и.т.д.. Тоесть, должен быть режим, когда при включении в сеть сразу начинается вращение мотора.
Силовая схема реализованна по рекомендациям из даташита модуля IKCM15F60. Управление на STM32F051. Гальванической изоляции нету. Тормозной резистор 15Вт, может поглощать около 1 КВт мощности с мотора. Он используется в том числе и для плавного запуска частотника.
Закладывались следующие параметры:
1)Мощность порядка 1Квт
2)Максимально компактный и недорогой по себистоимости, но не в ущерб надежности.
3) Простое скалярное управление, защита по току и перенапряжению.
4) Возможность управления либо по внешним вводам, либо автономно при подачи питания.
5) Из параметров, максимальная/минимальная частота, частота без внешнего задатчика, время разгона/торможения, время и напряжения тормоза пост.тока. Также, режимы работы.
6) Все параметры должны настравиватся через смартфон, единственное устройство индикации частотника — светодиод.
7) Должна быть возможность примитивной диагностики через смартфон, такой как — ток мотора, сетевое напряжение, температура модуля…
 Тормозной резистор встроенный, не предназначен для частых торможений большой инерции, поэтому может быть компактным.
Тормозной резистор встроенный, не предназначен для частых торможений большой инерции, поэтому может быть компактным.
На данный момент готова уже вторая версия, в схеме обнаружил только 1 недочет, не хватало конденсатора на выводе защиты модуля. Внешний вид:
Размеры платы 99х99, такой размер можна заказать в Китае по цене 2$шт. Для управления параметрами используется терминал программа для Андроид, Bluetooth дает гальваническую изоляцию. Корпус на данный момент не предусматривается.
Видео разгона и торможения 1.5Квт мотора с 160-мм патроном для нагрузки
Себестоимость всех компонетов частотника не считал, примерно 40-50$. Насколько мне известно, самый дешевый китайский частотник 1КВт стоит 70$, на счет его надежности и грамотности исполнения ничего не знаю. Опять же, доставка из Китая… Вроде как есть даже коммерческая перспективность.
Плюсом данной контрукции вижу удобную настройку через телефон, а так же возможность сделать конкретно те функции, которые наиболее удобны в домашнем использовании.