19.02.2021
Глава 4 — Источники ошибок ГНСС
В главе 2 мы представили концепцию источников ошибок ГНСС. Это факторы, которые затрудняют определение точного положения ГНСС приемника. В этой главе мы более подробно рассмотрим источники этих ошибок.
Таблица 13: Источники ошибок ГНСС

Источники ошибок
Спутниковые часы
Атомные часы на спутниках ГНСС очень точны, но они немного дрейфуют. К сожалению, небольшая неточность спутниковых часов приводит к значительной ошибке в определении приемником своего местоположения. Например, ошибка часов в 10(−6) сек приводит к ошибке положения в 3 м.
Часы на спутнике контролируются наземной системой управления ГНСС и сравниваются с еще более точными часами, используемыми в ней. В данных, передаваемых спутником пользователю, содержится оценка смещения бортовых часов. Обычно передаваемая точность составляет ± 2 м, хотя она может варьироваться в зависимости от разных систем ГНСС. Чтобы получить свое более точное местоположение, ГНСС приемник должен компенсировать ошибку часов.
Одним из способов компенсации погрешности часов является загрузка точной информации о часах спутника из систем дифференциальной коррекции (SBAS) или систем точного позиционирования (PPP). В передаваемой информации содержатся поправки за ошибки бортовых часов, которые были рассчитаны системами SBAS или PPP. Более подробные сведения о системах SBAS и PPP представлены в главе 5.
Другой способ компенсации погрешности часов — настроить приемник для работы в режиме дифференциальной коррекции или кинематики реального времени (RTK). В главе 5 также подробно рассматриваются дифференциальные методы ГНСС и RTK.
Ошибки эфемерид
Спутники ГНСС движутся по очень точным, хорошо известным орбитам. Однако, параметры орбиты немного меняются. Также, как и в случае с часами спутника, небольшое изменение орбиты приводит к значительной ошибке в вычисленном положении приемника.
Наземная система управления ГНСС постоянно отслеживает орбиты спутников. Когда орбита спутника изменяется, наземная система управления отправляет поправку на спутники, и эфемериды спутников обновляются. Даже с поправками, внесенными наземной системой управления ГНСС, все еще есть небольшие ошибки в параметрах орбиты, которые могут привести к ошибке местоположения до ± 2.5 м.
Одним из способов компенсации ошибок спутниковых орбит является загрузка точной эфемеридной информации из систем SBAS или PPP, которые будут более подробно рассматриваться в главе 5.
Другой способ компенсации ошибок спутниковой орбиты — использование приемника в режиме дифференциальной коррекции или RTK. Более подробная эта информация также представлена в главе 5.
Ионосферные задержки
Ионосфера — это слой атмосферы на высоте от 80 до 600 км над Землей. Этот слой содержит электрически заряженные частицы, называемые ионами. Эти ионы задерживают прохождение спутниковых сигналов и могут вызвать значительную ошибку определения местоположения спутника (обычно ± 5 м, но эта ошибка может возрастать в периоды высокой ионосферной активности, вызванной влиянием Солнца).
Ионосферная задержка зависит от солнечной активности, времени года, сезона, времени суток и места. В результате очень трудно предсказать, насколько ионосферная задержка повлияет на расчетное местоположение.
Ионосферная задержка также изменяется в зависимости от частоты радиосигнала, проходящего через ионосферу. ГНСС приемники, которые принимают более одной частоты, например L1 и L2, могут использовать это для повышения точности. Сравнивая измерения на L1 с измерениями на L2, приемник может определить величину ионосферной задержки и удалить эту ошибку из рассчитанных координат.
Для приемников, которые могут отслеживать только одну частоту ГНСС, используются модели ионосферы для уменьшения влияния ошибок, вызванных влиянием ионосферы. Из-за различного характера ионосферной задержки модели не так эффективны, как использование нескольких частот для их устранения.
Ионосферные условия очень похожи в пределах отдельной области, поэтому спутниковые сигналы, поступающие на приемники базовой станции и подвижные приемники, имеют очень похожую задержку. Это позволяет компенсировать ионосферную задержку дифференциальными методами ГНСС и RTK.
Тропосферные задержки
Тропосфера — это ближайший к поверхности Земли слой атмосферы.

Рис. 37
Вариации задержки в тропосфере вызываются изменением влажности, температуры и атмосферного давления.
Поскольку тропосферные условия в пределах отдельной зоны очень похожи, то базовая станция и приемники подвижного приемника испытывают очень похожее влияние тропосферы. Это позволяет дифференциальным методам ГНСС и RTK компенсировать тропосферную задержку.
Приемники ГНСС также могут использовать тропосферные модели для оценки количества ошибок, вызванных тропосферной задержкой.
Собственные шумы приемника
Шум приемника добавляет к ошибке положения величины, вызванные аппаратным и программным обеспечением. Приемники ГНСС высшего класса, как правило, имеют меньшие ошибки из-за собственного шума, чем более дешевые приемники.
Влияние многолучевости
Как показано на рис. 38 многолучевое распространение происходит, когда сигнал от спутника ГНСС отражается от объекта, например, стены здания, а затем приходит к антенне приемника. Поскольку отраженный сигнал распространяется дольше, то он поступает в приемник с небольшой задержкой. Этот задержанный сигнал может привести к тому, что приемник вычислит неправильное положение.

Рис. 38
Самый простой способ уменьшить ошибки из-за многолучевого распространения это разместить ГНСС антенну в месте, удаленном от отражающих поверхностей. Когда это невозможно, приемник и антенна ГНСС должны уметь обрабатывать многолучевые сигналы.
Ошибки многолучевого распространения с большой задержкой обычно обрабатываются ГНСС приемником, а ошибки сигнала с короткой задержкой отрабатываются антенной. Благодаря применению дополнительных технологий, высокопроизводительные приемники и ГНСС антенны, как правило, лучше устраняют ошибки многолучевости.
Заключение
В этой главе описаны источники ошибок, которые вызывают погрешности при расчете позиции. В главе 5 мы опишем методы, которые используют приемники ГНСС для уменьшения этих ошибок и получения более точного местоположения.
Материалы взяты с сайта компании NovAtel. Ссылка на первоисточник: https://novatel.com/an-introduction-to-gnss
Система GNSS позволяет в планетарном масштабе выполнять навигационные функции, то есть определять текущее местоположение потребителей навигационной информации и их скорость и осуществлять точную координацию времени на поверхности Земли и в околоземном пространстве. Созданию GNSS способствовало развитие всех отраслей науки и техники.
Основой GNSS являются спутниковые радионавигационные системы GPS (США), ГЛОНАСС (Россия), космические и наземные функциональные дополнения и аппаратура потребителя.
Приемник GPS отслеживает как код спутника, так и сигналы несущей, и преобразует их в дальность и приращение дальности от навигационного спутника до приемника. Существует несколько источников погрешностей, искажающих определение кода и несущей навигационного сигнала. К основным источникам погрешностей можно отнести ионосферную задержку, погрешности бортовых часов, погрешности эфемерид, тропосферную задержку, шумы приемника и многолучевость. Большинство из вышеназванных погрешностей может быть компенсировано методами дифференциальной коррекции. Ошибка задержки сигнала в ионосфере может быть вычислена путем проведения измерений на нескольких (двух) частотах. Но шумовые погрешности приемника и погрешности многолучевости независимы для каждого приемника. Шум приемника подобен белому шуму и может быть отфильтрован, а многолучевая погрешность — главный источник ошибок для высокоточной навигации. Это особенно верно для кодовых измерений, когда погрешности достигают величин десятков метров.
Технология оценивания этих погрешностей основывается на свойствах временной корреляции погрешностей многолучевости навигационного сигнала. Используются два способа — фильтр Калмана. В 4-го порядка и простой фильтр Калмана 2-го порядка для сигналов каждого навигационного спутника. Оцениваются дальность до навигационного спутника, приращение дальности, погрешность многолучевости и однозначность измерений. Для запуска фильтра требуются параметры кода сигнала и фазы несущей. Специальные методы используются для идентификации сигналов конкретного спутника. Экспериментальные результаты показывают, что методика может не только улучшить характеристики процесса навигации (в основном точность при статических измерениях), но и повысить качество навигационного обеспечения мобильных потребителей.
На приемную антенну аппаратуры потребителя GNSS может поступать не только прямой сигнал от навигационного космического аппарата (НКА), но и множество переотраженных сигналов от земной, морской поверхностей или близлежащих объектов. Для авиационного потребителя КНС (космическая навигационная система) задержка отраженного сигнала от НКА, находящегося в зените, может составлять 2/3…160 мкс, а при небольших углах возвышения НКА это значение уменьшается на порядок. Уровень отраженного сигнала может быть соизмеримым с прямым сигналом. Это приводит к существенным искажениям полезного сигнала и к погрешностям в схемах слежения за параметрами этого сигнала (задержкой, частотой и фазой). Эти погрешности во многом зависят от взаимного расположения НКА, приемной антенны аппаратуры потребителя (АП) КНС и отражающих объектов.
Экспериментальные исследования показали большой разброс значений дальномерной погрешности из-за многолучевости, которая составляет 0,5–2 м в лучшем случае (при использовании специальных антенн) и до 100 м в худшем (в городских условиях с высотными зданиями). Использование в последней ситуации приемников сигналов стандартной точности (С/А-сигналов GPS или СТ-сигналов ГЛОНАСС) с узкополосными корреляторами может снизить погрешности на порядок. Кроме того, использование высокоточных сигналов (например, Р(Y)-сигналов GPS или ВТ-сигналов ГЛОНАСС) позволяет снизить погрешности из-за многолучевости в среднем до 1–3 м и в наихудшей ситуации до 8 м (1 σ). В наиболее неблагоприятных ситуациях может произойти срыв слежения в следящих схемах, особенно в фазовых.
Приемник GPS генерирует на заданной частоте определенный псевдослучайный кодовый сигнал (PRN), который используется для синхронизации с навигационным сигналом спутника. Локально генерированный сигнал обрабатывается путем частотного поиска (или FFT) для коррекции влияния эффекта Доплера, AFC-цепь используется для обеспечения захвата частоты, и COSTAS-цепь используется для захвата фазы. Захват канала происходит, когда эти процессы достигают устойчивого состояния. Для сопровождения спутникового сигнала используются ошибка сопровождения и обратная связь по коду, частоте и уходу частоты, чтобы поддержать максимальную корреляцию между спутниковым сигналом и локальным сигналом. Локальный сигнал, который известен, используется для получения дальности и приращения дальности по фазе несущей.
Погрешности многолучевости появляются вследствие отражения от поверхностей при прохождении навигационного сигнала от спутника к приемнику. Отраженные сигналы сдвигают корреляционный пик и искажают теоретически симметричную корреляционную характеристику приемника. Это приводит к погрешностям в измерениях фазы и псевдодальности. Погрешности многолучевости присущи как стационарным, так и мобильным потребителям [1]. Для мобильных приемников путь навигационного сигнала и отражающая геометрия изменяются, поэтому время корреляции погрешностей многолучевости для мобильных потребителей значительно меньше чем для стационарных. И в стационарных, и в мобильных реализациях неизвестные характеристики прямых и отраженных сигналов делают моделирование (и прогнозирование) погрешностей многолучевости неосуществимой задачей. Погрешность кода изза многолучевости может трансформироваться в погрешность псевдодальности от 1 до 3 метров в зависимости от типа и параметров антенны, в то время как многолучевая погрешность фазы обычно меньше нескольких сантиметров.
В настоящее время отработано и реализовано несколько методов оценивания и снижения погрешностей многолучевости. Существующие методы могут быть классифицированы по трем большим категориям в соответствии с обрабатываемыми сигналами: первая категория базируется на радиочастотных сигналах; вторая — на доступных сигналах основной полосы частот; третья — на заключительных измерениях (код, сдвиг фазы). Первая категория включаетиспользование антенн с кольцевыми компенсаторами (choke-ring) [2] и применение мультиплексных антенн для снижения многолучевости [3]. Вторая категория включает применение технологии узкого коррелятора [4, 5], коррелятора «удвоенной дельты» [6, 5], опережающих и запаздывающих уклонений [7, 5]. Третья категория может использоваться в большинстве сценариев, не требуя доступа к основной полосе частот и частоте радиосигнала GPS-приемника. Эта категория включает обработку предшествующих измерений для коррекции последующих, анализируя отношение «сигнал — шум» (SNR) измерений, оценивая погрешность многолучевости путем моделирования [1ъ, и используя мультиплексные GPS-антенны для снижения многолучевости [7].
Многолучевость ведет к искажению дальностей. Рассмотрим, влияние отраженных радиолучей. Допустим, что к приемной антенне подошел прямой радиолуч от НКА, а также отраженный от поверхности земли. Отраженный луч отличается от прямого по амплитуде и по фазе. Из-за неизбежных потерь при отражении его амплитуда уменьшается, изменяясь пропорционально коэффициенту отражения ρ. Фаза изменяется по двум причинам: во-первых, в результате сдвига фазы при отражении на угол В и, во-вторых, из-за потери фазы за счет разности хода лучей на величину ΔR. Суммарный сдвиг по фазе равен
![]()
Вектор прямого луча с амплитудой напряженности электрического поля E суммируется с вектором отраженного луча. Вектор отраженного луча амплитуды E повернут на угол β.
Результирующий вектор амплитуды кЕ повернут на угол α. Электрическое поле в месте расположения антенны является результатом интерференции обоих лучей (рис. 1). При этом амплитуда результирующего поля изменяется в k раз по сравнению с амплитудой поля прямого луча, а его фаза сдвигается на угол α:
![]()

Рис. 1. Векторная диаграмма формирования результирующего луча kE из прямого E и отраженного E
Коэффициент отражения ρ и угол сдвига фазы ? зависят от диэлектрической проницаемости и удельной электрической проводимости отражающей поверхности, длины волны, угла скольжения и поляризации радиолуча.
Определим разность хода ΔR (рис. 2). Центр антенны расположен в точке С на высоте h. Антенну устанавливают на штативе или шесте, ее высота составляет 1–2,5 м. Ввиду большой удаленности НКА падающие лучи можно считать параллельными. Тогда угол скольжения радиолуча γ и расстояние до точки отражения d соответственно равны:
![]()
где Z — зенитное расстояние спутника (когда Z < 80°, а γ > 10°). Это означает, что при данных высотах h отражения происходят на удалениях от антенны d < 5–15 м. В точках A и B расстояния до НКА одинаковы. Далее прямому лучу предстоит пройти отрезок BC, а отраженному — отрезок AC. Разность хода равна:
![]()

Рис. 2. Разность хода прямого и отраженного лучей; экран, если он установлен, отсекает отраженные лучи
Разность хода ΔR зависит от высоты антенны h и угла скольжения γ. Благодаря движению НКА угол скольжения меняется, что ведет к непрерывным изменениям разности хода ΔR. Вслед за изменениями ΔR меняются угол α и погрешность Δотраж. Диапазон колебаний угла α определяется крайними положениями вектора kE в точках Q1 и Q2 (рис. 1).
Очень важно, что погрешности Δотраж во времени меняются периодически. Если наблюдения длятся дольше периода изменения погрешностей, а затем накопленные измерения обрабатывают совместно, то искажения существенно компенсируются.
На рис. 3 приведены графики, показывающие периодическое поведение погрешностей Δотраж в течение десятиминутного интервала наблюдений. Искажения подсчитаны через 1 минуту для высот антенн 1,5 и 1,95 м. Предполагалось, что поляризация волн линейная, горизонтальная, λ = 19 см, а отражения происходят от поверхности пресной воды. На графиках отчетливо видна периодичность искажений. Амплитуда колебаний Δотраж свыше 30 мм. Средние результаты искажены всего на 0 и на 3 мм. Для сухих и влажных почв амплитуда Δотраж уменьшится.

Рис. 3. Графики Δотраж; λВ = 19 см
Реальная картина несколько сложнее. Радиолуч обладает не линейной, а круговой поляризацией. Поэтому волна, падающая на отражающую поверхность, имеет не только горизонтально, но и вертикально поляризованные составляющие. Отражаясь, они приобретают разные коэффициенты ρ и углы сдвига фазы υ. В отраженном луче изменяется направление вращения плоскости поляризации; в приемной антенне луч дополнительно ослабляется. Тем не менее, в фазовых измерениях картина близка к рассмотренной: искажения из-за многолучевости достигают нескольких сантиметров, период их колебаний — около 10 минут, а при продолжительных наблюдениях происходит их хорошая компенсация.
Влияние многолучевости на кодовые измерения более значительны; их оценивают погрешностями в несколько метров. В геодезических антеннах устанавливают металлические экраны, отсекающие отраженные от земной поверхности лучи (рис. 3). В некоторых приемниках встроены программы подавления многолучевости.
Теория многолучевости
Отражения имеют место, когда электромагнитные волны достигают препятствий типа поверхности воды или конструкций здания. Сигналы спутников GPS являются склонными к многолучевому отражению, особенно когда приемные антенны установлены на крыше машин и механизмов, подобных дорожным бетоноукладчикам или бульдозерам.
Некоторые поверхности вблизи приемной антенны GPS могут создавать отраженный сигнал, по геометрическим и электрическим характеристикам (по форме волны) повторяющий прямой сигнал. В этом случае отражение сигнала называют «зеркальным», в противоположность «разбросанному». Тип и размер отражающей поверхности определяет, какое отражение имеет место — зеркальное или разбросанное. Критерий, известный как критерий Роли, описывает, как зависит тип отражающей поверхности от длины волны. Далее рассмотрим достаточно гладкие отражающие поверхности в качестве зеркальных отражателей.
При исследовании и моделировании явления многолучевости в дополнение к критерию Роли необходимо рассмотреть и другие критерии, в том числе геометрические. Это относится в первую очередь к зависимости возникновения многолучевости от размера отражателя и от длины волны излучения. Длины волн сигналов навигационных спутников (L1: 19 см и L2: 24 см) являются малыми величинами по сравнению с размерами потенциальных препятствий.
Принимая введенные ограничения, можно считать, что процесс переотражения навигационных сигналов является детерминированным, и возможно применение законов распространения электромагнитных волн, используемых в геометрической оптике. В этом случае угол отражения будет равен углу падения.
Отражение изменяет основные спектральные параметры сигнала, главным образом амплитуду и фазу (а также частоту, если учитывать скорость перемещения потребителя с приемной антенной). Электромагнитная теория дает всестороннее описание явления отражения. Общим является тот факт, что коэффициент отражения (который связывает и амплитуду и фазу прямой и отраженной волн), зависит от материала отражателя, а также от угла падения. Его величина и его аргумент соответственно определяют амплитуду и фазу отраженного сигнала. При отражении происходит неизбежное ослабление амплитуды первичного сигнала, потому что величина коэффициента отражения всегда меньше единицы.
Кроме того, признак полярности (то есть вращение электромагнитного поля) инвертирован, если угол падения выше так называемого угла Брюстера. Тогда фаза отраженного сигнала изменяется на 180°. Значение угла Брюстера в случае использования металлического отражателя определяется величиной в единицы градусов. В общем случае можно считать, что всегда присутствует изменение фазы отраженного сигнала на 180° относительно прямого сигнала.
В дополнение к первичному ослаблению амплитуды и инвертированию фазы необходимо принимать во внимание коэффициент усиления и частотные характеристики приемной антенны. Они всегда различны для правой и левой поляризации, для различных углов возвышения и азимута.
В качестве примера на рис. 4 приведена фазовая диаграмма антенны AT502 для частоты L1 (AeroAntenna). Большинство антенн GPS — с правой поляризацией (в силу своей конструкции), и если их не режектировать, они гасят волны с левой поляризацией.

Рис. 4. Фазовая диаграмма антенны AT502 для частоты L1 (AeroAntenna)
Кроме того, образец фазы создает изменение фазы антенны, которое далее изменяет фазу сигнала, особенно при левосторонней поляризации.
Можно предположить, что в случае использования металлических отражателей отражение зеркально, и углы падения выше угла Брюстера. Следовательно, соотношение фаз прямого и отраженного сигналов зависит только от дополнительного пути отраженного сигнала плюс изменения на 180° фазы отраженного сигнала, плюс изменения фазы антенны. Ослабление соответствует левосторонней поляризации сигнала.
Окно снижения фазовой многолучевости
Окно снижения фазовой многолучевости (PMMW) было предложено инженерами компании LEICA [1]. Коррелятор окна фазы — новый доступный инструмент оценки ошибок многолучевости при фазовых измерениях. Вместо объединения полученных синфазных и противофазных параметров сигналов на каждый момент времени (около 40 МГц), используются только образцы, непосредственно предшествующие и следующие за кодовым переходом (рис. 5).

Рис. 5. Окно снижения фазовой многолучевости (PMMW)
Можно показать, что эта специфическая технология осуществления выборки позволяет проводить практическую оценку изменения доплеровского сдвига при наличии многолучевого отражения.
LEICA использует технологию PMMW в своих чипсетах уже несколько лет для повышения качества измерений в системе GPS. Этому посвящено новое программное обеспечение, специально разработанное для реализации PMMW-корреляторa. Испытания нового оборудования прошли в июле 2003 года и позволили оценить возможности и ограничения программного продукта.
Модель многолучевости и ее свойства
В работе [11] показано, что прямой сигнал GPS может быть описан следующим образом:
![]()
где А — амплитуда сигнала GPS, P(t) — P-модулированный код, t — временная задержка, ω0 — начальная фаза. Отраженный сигнал может быть описан так:

где αm — объединенная многолучевая относительная амплитуда, δk — объединенная многолучевая относительная временная задержка, θm — объединенная многолучевая относительная фаза.
Таким образом, полный сигнал на входе GPS-приемника имеет вид:

Из уравнения (3) следует, что существует временная корреляция между sd(t) и sm(t), определяемая параметрами αm, δk, и θm в случаях, когда GPS-приемник выполняет корреляционную обработку сигнала.
Комбинирование измерений на частотах L1 и L2
Значения разностей псевдодальностей и разностей фаз на частотах L1 и L2 могут быть записаны так:

где
![]()
ρ — разность кодовых измерений,
![]()
φ — разность фазовых измерений, r — истинная дальность от навигационного спутника до GPS-приемника, N — целочисленная неопределенность, ƒ — фаза несущей частоты, Iα — ошибка задержки сигнала в ионосфере, МР — кодовая погрешность многолучевости, η — шум кода, n — шум фазы плюс фаза многолучевости, который в данном случае не учитывается, индекс 1 соответствует частоте L1, индекс 2 — частоте L2.
Объединение уравнений (4) и (5) позволяет удалить ионосферную погрешность Iα и получить:

или:
![]()
где

Объединение уравнений (6) и (7) позволяет удалить ионосферную погрешность и получить уравнение:

которое можно переписать в виде:
![]()
где
![]()
Уравнения (9) и (11) представляют собой основные уравнения для оценок погрешностей многолучевости. Преобразуя уравнения (9) и (11) для удаления термина дальности r, получаем:

где
![]()
Общая модель многолучевости
Моделирование погрешности многолучевости путем ее представления в виде процесса Гаусса-Маркова 1-й степени проведено в работе [1], где показано, что погрешность многолучевости обычно не является константой. Результирующая модель имеет вид:
![]()
Используем уравнения (9) и (11) для определения вектора состояния вида
![]()
при невысокой динамике потребителя. Для потребителя с высокой динамикой вектор состояния может быть определен в виде
![]()
. Для вычисления погрешности многолучевости примем, что
![]()
. Динамическая модель может быть представлена так:

где τν — время корреляции скорости; τm — время корреляции погрешности многолучевости при τm от 60 до 960 секунд уравнение изменений (9) можно записать в виде:
![]()
где

Уравнение измерений вида (11) может быть записано так:
![]()
где

Наиболее неблагоприятным случаем проявления многолучевой погрешности является прямое наложение отраженных сигналов на прямые для стационарного потребителя. Предположим, то, что статичность системы
![]()
стремится к 0, время многолучевой корреляции равно τm и шум процесса переотражения равен σm, и оценим процесс многолучевости при σpcd = 1 м, σcd = 0,01 м и σv = 0,01 м/с.
На рис. 6 показано, что все состояния сходятся с различной продолжительностью для различного времени коррекции τm. Дальность сходится быстро за счет точного измерения фазы. Чем меньше время корреляции, тем лучше сходимость. Неопределенность знания дальности τ и неоднозначность N непосредственно зависят от времени многолучевой коррекции τm

На рис. 7 показано, что все состояния наблюдаются с различной неопределенностью. Отклонение дальности быстро сходится благодаря высокой точности фазовых измерений. Чем меньше погрешность многолучевости, тем точнее определяется вектор состояния.

Простая модель многолучевости
Для реализаций в реальном времени очень важна вычислительная эффективность. Для того чтобы использовать уравнения (12) в качестве фильтра, требуется вектор состояния определить в виде x = [MP,N]T без учета динамики. Когда величина N полностью детерминирована, дальность r может быть легко вычислена в соответствии с уравнением (11). Динамическая модель может быть представлена в виде:

Уравнение измерений (12) может быть записано так:

где
![]()
Рассмотрим, как время многолучевой корреляции τm, и погрешность обработки многолучевости влияют на параметры оценки состояния при σcd 1 и 0,01 м.
На рис. 8 показано, что и многолучевость, и неоднозначность сходятся с различной продолжительностью в течение различного времени корреляции τm. Чем короче время корреляции, тем лучше сходимость. Неуверенность в одно значности N строго зависит от времени многолучевой корреляции τm, которое является важным для оценки состояния по уравнению (11) и самой неоднозначности N.

Рис. 9 иллюстрирует, что все наблюдаемые состояния обладают различной неопределенностью. Чем меньше величина погрешности многолучевости, тем более точна оценка вектора состояния объекта навигации.

Адаптивное вычисление времени корреляции
На рис. 6 и 8 показано, что время многолучевой корреляции Вm, действительно влияет на время оценки состояния и точность. Время корреляции может быть определено экспериментальным уравнением вида:
![]()
где τm0 — начальное время многолучевой корреляции, В — постоянная скалярная величина, rp — остаточное отклонение, t — время, σ — знак частной производной и σx — сглаженная частная производная x.
Величина погрешности обработки многолучевости
На рис. 7 и 9 показано, что параметр многолучевости Вm влияет на сходимость параметров состояния и точность.
Значение параметра многолучевости может быть определено следующим уравнением:
![]()
где σm0 — начальное отклонение стандартной величины многолучевости, β — постоянная скалярная величина, σr0 — стандартное отклонение и x — сглаженное значение x.
Результаты эксперимента
В ходе проведения эксперимента были собраны данные измерений за 24 часа работы продукта StarFire кампании NavCom, которые затем были приведены к терминологии уравнения (12). Для описания составляющих многолучевости использовалась простая двухкомпонентная модель многолучевости с такими параметрами, как кодовая ошибка многолучевости (МР), неоднозначность N при τm = 600 с и σm = 1 м. Для сравнения с этим фильтром используется традиционный экспоненциальный фильтр при T = 3600 с, а также сглаживание данных.
На рис. 10, 11 /см. pdf статьи/ и 12 приведены графики для PRN 2, PRN 5, и PRN 8. Видно, что простой многолучевый фильтр реально приводит к устойчивому состоянию быстрее экспоненциального фильтра. В табл. 1 и 2 показаны сглаженные результаты оценивания неопределенности с применением соответственно многолучевого и экспоненциального фильтров. Сравнивая простой многолучевый и экспоненциальный фильтры, можно сделать вывод, что простой многолучевый фильтр приводит к меньшему стандартному отклонению, чем экспоненциальный. Однако есть некоторое отклонение в средних значениях результатов работы простого многолучевого и экспоненциального фильтров. Это отклонение будет компенсироваться отклонением фазы состояния в программном обеспечении системы StarFire.

Рис. 10. Погрешности оценки состояния PRN 2. Верхний рисунок – оценка многолучевости при использовании простой модели, снизу – оценка неоднозначности для простой модели (сплошная линия) и для экспоненциального фильтра (прерывистая линия)

Рис. 12. Погрешности оценки состояния PRN 5. Верхний рисунок – оценка многолучевости при использовании простой модели, снизу – оценка неоднозначности для простой модели (сплошная линия) и для экспоненциального фильтра (прерывистая линия)
Таблица 1. Результат работы многолучевого фильтра

Таблица 2. Результат работы экспоненциального фильтра

Результаты экспериментальных исследований влияния многолучевости на навигацию мобильных объектов
Несмотря на огромные успехи в повышении точности GPS-навигации в реальном времени в последние годы, организация надежной и высокоточной навигации мобильных и стационарных объектов в различных индустриальных приложениях (например, обеспечение автоматизированной работы строительных и дорожных машин) все еще вызывает определенные трудности. Основным источником погрешностей навигационных определений для потребителей подобного класса является переотражение навигационного сигнала, принимаемого антенной потребителя (многолучевость), от элементов конструкции машин и механизмов.
По требованиям к функциональным параметрам GPS-навигации оборудование промышленного и гражданского строительства можно разделить на три группы [12]:
- машины и механизмы, предназначенные для земляных работ, добывающее оборудование типа экскаваторов, скреперов, бульдозеров и т. д.;
- так называемое «всплывающее оборудование», то есть машины и механизмы, которые двигаются по поверхности земли без значимых изменений высотной составляющей центра масс (типа компакторов, распорок цемента, миксеров и т. д.) и требующие так называемую 2D-навигацию, то есть определение лишь «плановых» координат;
- так называемое «копировальное оборудование», то есть машины и механизмы, которые изменяют профиль участка работы дополнением или удалением материала (типа дорожных бетоноукладчиков, асфальтоукладчиков, фрезерных станков и т. д.).
Рассмотрим третью группу потребителей, как наиболее требовательных к точности навигационного обеспечения, особенно в определении высотной составляющей, которая обычно вычисляется с наибольшей погрешностью. На рис. 13 показан дорожный укладчик асфальта в работе. Машины данного класса движутся очень медленно (единицы метров в минуту), практически с постоянной скоростью, но должны обеспечивать очень гладкий и точно выровненный слой материала. Количественно толщина покрытия устанавливается положением инструмента путем пересчета реального положения машины в «плановых» координатах (по двум осям координат), названных «towpoints», промежуточным звеном в виде двух «выравнивающихся рук». Высокая точность покрытия укладываемого материала зависит от уровня и ориентации существующего покрытия. Погрешность укладки в зависимости от типа материала составляет 1–3 см. Такую высокую точность покрытия можно обеспечить только при использовании GPS-навигации в реальном времени.

Рис. 13. Дорожный укладчик асфальта
В настоящее время достигнутая точность RTK-режима системы удовлетворяет этим требования в условиях видимости навигационных спутников и на коротких базовых линиях. Однако реальное функционирование строительных машин и механизмов происходит в особенно сложной окружающей обстановке при затрудненных условиях наблюдения. Помехи навигационному сигналу создают расположенные в непосредственной близости объекты типа зданий, деревьев или машин, вызывая потерю сигнала и дифракцию, но кроме этого они вызывают погрешности от переотражения (многолучевости), поскольку прямые сигналы от спутников смешаны с отраженными от таких объектов. Это ограничивает точность GPS-навигации, несмотря на многие усовершенствования, сделанные в последние годы.
В рамках исследований в области робототехники в лаборатории Central des Ponts et Chaussees с 1995 года в Нанте проводится полномасштабное изучение точности местоопределения мобильных объектов в реальном времени с помощью специально созданного испытательного средства, называемого SESSYL (рис. 14).

Рис. 14. Вагонетка SESSYL на тестовом рельсовом пути
Испытательный стенд состоит из замкнутого металлического рельсового пути (оси эллипса имеют размеры 81 м и 16 м соответственно), установленного на прочную стенку, и мобильной рельсовой вагонетки. В верхней части вагонетки расположена платформа, регулируемая по трем степеням свободы. Таким образом, любое оборудование, установленное на платформе, может повторить требуемую траекторию с заданными линейными и угловыми параметрами.
При движении вагонетки возможны два диапазона скоростей: «копировального» оборудования (от 0 до 1 км/ч), а также перемещения земли и «всплывающего» оборудования (от 1 до 15 км/ч). Отклонение между измеренной и реальной траекторией стенда позволяет оценить качество функционирования испытываемой системы, особенно точность, а также и другие интересные параметры, например, время переинициализации.
Для исследования явления многолучевости и переотражения в управляемой окружающей среде SESSYL установили специально разработанный большой металлический отражатель (5×2,5 м, рис. 15). Это было сделано для исследования зависимости явления многолучевости от положения антенны и расстояния до отражающей поверхности.

Рис. 15. Вагонетка SESSYL и металлический экран для изучения многолучевости
В ходе испытаний отражатель всегда располагали с северной стороны относительно приемной антенны с возможностью максимального отклонения его плоскости от вертикали для исключения влияния многолучевости навигационных сигналов от спутников с малым углом возвышения (поскольку сигналы от этих спутников уже подвержены искажению за счет окологоризонтной атмосферной рефракции), а также для исключения сигналов спутников с возвышением более 70°.
Графическое представление зон возникновения эффекта многолучевого переотражения представлено на рис. 16, откуда видно, что когда отражатель расположен достаточно близко к антенне, невозможно устранить одновременно спутники с малыми и большими углами возвышения. В подобных ситуациях приоритет отдавался маскированию низких спутников.

Рис. 16. Круговые диаграммы зон многолучевого переотражения сигнала в случаях расположения отражателя на расстоянии в 1, 4 и 7 м
Испытательный стенд предназначен для определения положения отражателя в местной системе координат с погрешностью не более 1 мм (1 В). Это позволило подтвердить на практике теоретические положения и построить зоны многолучевого переотражения.
План статических и кинематических испытаний приведен в табл. 3. Статические испытания продолжались в течение 23 часов (деление на 3 части сделано искусственно для облегчения обработки данных, что показано на рис. 18). Кинематические испытания проводились циклами по 20 минут, вагонетка двигалась со скоростью 0,05 м/с. Время каждого испытания составило 100 с. В день проводилось по 27 испытаний.
Таблица 3. План испытаний

Необходимо отметить, что кинематические испытания с SESSYL проводились ежедневно в тоже самое сидерическое время для поддержания того же самого навигационного созвездия и поддержания идентичной геометрии испытаний.
При анализе результатов испытаний рассматривался каждый спутник в зоне видимости на предмет влияния его расположения относительно отражателя и приемной антенны на возникновение эффекта многолучевости. Временные зависимости экспериментально полученных непосредственных отклонений фазы на частоте L1 представлены на рис. 18, где в виде зеленых окон приведены временные зоны многолучевости.

Рис. 18. Результаты статических испытаний с отражателем на расстоянии 4 м (для 8 навигационных спутников в зоне радиовидимости)
Экспериментальные непосредственные отклонения вычислены на основе известного положения ровера, получаемого геодезическими измерениями в случае статических испытаний, либо вычисленного в относительных координатах вагонетки в случае кинематических испытаний.
Временные зоны переотражения можно вычислить геометрически (рис. 17). Они соответствуют ситуации, когда спутник скрыт отражающей панелью, но его сигнал все еще наблюдается. Временные зоны переотражения представлены на рис. 17 в виде красных окон. Необходимо отметить, что «горизонтная» дифракция всегда существует при наклонениях менее 15°. Этот эффект, также как и переотражение от панели, проявляется в экспериментально полученных непосредственных отклонениях фазы, которые неограниченно увеличиваются.

Рис. 17. Геометрическая интерпретация явления многолучевости
Результаты испытаний были проанализированы как с учетом проведения фазовой коррекции на частоте L1 с использованием фазового коррелятора PMMW, так и без учета коррекции. На рис. 19 показано изменение масштаба временных зон многолучевости на примере навигационного спутника SV1 для двух рассматриваемых при анализе случаев.

Рис. 19. Иллюстрация эффекта непосредственных отклонений фазы PMMW в статике (отражатель на расстоянии 4 м)
В табл. 4 приведены коэффициенты увеличения, вычисленные следующим образом:
![]()
где: σ — стандартное отклонение экспериментально полученных непосредственных отклонений фазы на частоте L1, называемое «стандартной фазой частоты L1»; σPMMW — стандартное отклонение экспериментально полученных непосредственных отклонений фазы на частоте L1 проведения фазовой коррекции с использованием PMMW фазового коррелятора.
Этот анализ обобщен для всех спутников, попадающих в зону многолучевости, причем для одних и тех же временных интервалов при наличии и отсутствии отражательной панели (последнее отмечено курсивом). Результаты статических испытаний сведены в табл. 4.
Таблица 4. Непосредственные отклонения фазы на частоте L1 в статике

Результаты табл. 4 подтверждают главный ожидаемый результат: эффективность PMMW-коррекции теоретически и практически зависит от дополнительного пути прохождения переотраженного сигнала.
Данные для случая отсутствия отражателя в таблице приведены для сравнения. Необходимо отметить два момента:
- присутствует некоторое увеличение на несколько процентов при отсутствии отражателя (это можно объяснить способностью коррелятора окна фазы снижать даже слабую многолучевость, существующую в окружающей среде);
- стандартное отклонение значительно выше в пределах временных периодов, соответствую щих случаю, когда расстояние до отражателя составляет 1 м — из-за того, что навигационные спутники расположены ниже отражателя по углу места (рис. 10).
В тоже время необходимо отметить, что фазовый коррелятор не предназначен для полного снижения дифракции (рис. 20).

Рис. 20. Иллюстрация невозможности полного снижения дифракц ии методом PMMW. Подобный анализ может быть проведен и для результатов кинематических испытаний
Результаты кинематических испытаний (рис. 21) обобщены в табл. 5. Из них видно проявление тенденции, выявленной при статистических испытаниях, хотя в этом случае коррелятор окна фазы менее эффективен.

Рис. 21. Результаты шести кинематических испытаний с отражателем на расстоянии 4 м (приведены для 8 навигационных спутников, находящихся в зоне радиовидимости) спутников в зоне радиовидимости
Таблица 5. Непосредственные отклонения фазы на частоте L1 в динамике

Можно предположить, что метод нерезультативен при столь высоких значениях коэффициента увеличения на расстояниях до 7,5 м. Другими словами испытания подтвердили теоретические положения о том, что фазовый коррелятор окна не способен существенно снизить многолучевость при расположении отражателей близко к приемной антенне.
Анализ погрешности, вызванной многолучевостью
Для преодоления описанного выше основного ограничения метода PMMW хотя бы с 50-процентным успехом разработан алгоритм моделирования и восстановления погрешностей многолучевости, инвариантный к расстоянию между антенной ровера и отражателем.
Мнолучевость можно описать следующими параметрами:
-
- функциональной зависимостью изменения отношения «сигнал — шум» (обозначенного как SNR или C/N0 в полосе пропускания приемника) относительно угла места навигационного спутника;
- кодовой погрешностью В (только для базовых линий в несколько километров), полученной путем учета отклонений от средних значений параметров ионосферы для частот L1 и L2:
![]()
- PMMW-коррекцией, которая является оценкой ошибки фазы Φ.
Эффект многолучевости может быть описан следующим образом:

для n переотраженных сигналов (i = 1…n), где:
![]()
; R — кодовая автокорреляционная функция; di — кодовая задержка i-го отраженного сигнала; ΘiВ — фазовая задержка стадииВ i-го, отраженного сигнала; αi — отношение амплитуд i-го прямого и отраженного сигналов; K — константа, независимая от индекса i прямых и отраженных сигналов. Значение коэффициента K является характеристикой конкретного типа приемника GPS по соотношению «сигнал — шум» (C/N0).
Приведенные соотношения следуют из законов геометрической оптики [13, 14, 3].
Коррекция фазовых вызванных многолучевостью ошибок, основанная на соотношении «сигнал — шум», впервые была описана в работе [14]. Этот метод базируется на гармоническом характере изменений отношения «сигнал — шум» (см. уравнение 24) около его номинального значения при возникновении многолучевости.
Идентификация амплитуд (обозначенных Ai) и аргументов (обозначенных hi) этих компонентов возможна путем объединения различных классических алгоритмов сигнальной обработки — в первую очередь, адаптивной фильтрации по задержке (ANF) для частотной и амплитудной идентификации, а во-вторых, адаптивного метода наименьших квадратов (ALS). Общая зависимость имеет вид:
![]()
Такая идентификация лежит в основе способа фазовой коррекции. Фактически, фазовая коррекция многолучевости показана в выражении (25), где приведены та же самая амплитуда (αi) и аргумент (Θi) в качестве многолучевого отклонения соотношения «сигнал — шум».
Следовательно, Ai и hi, введенные выше как вариации отношения «сигнал — шум», могут быть подставлены в выражение (26) для фазовой коррекции:
![]()
Однако идентификация по вариациям соотношения «сигнал — шум» (C/N0) не позволяет получить знак аргумента, так как это отношение позволяет восстановить только значение косинуса аргумента, а не синуса (поэтому знак остается неопределенным). На практике он может выбираться по правилу наилучшего соответствия экспериментально полученным непосредственным отклонениям фазы.

Рис. 22. Комплексный алгоритм SNR-PMMW
PMMW-оценки погрешности фазы позволяют определить знак фазовой коррекции [15]. Основная идея алгоритма представлена на рис. 22. Этот алгоритм был проверен на нескольких двух массивах измерительной информации (для навигационных спутников SV1 и SV2), полученных при проведении статических испытаний. На рис. 23 показано стандартное отклонение исправленных экспериментально полученных непосредственных отклонений фазы по отношению к коэффициенту увеличения (1/K) применительно к процессу восстановления фазовой погрешности. Важно заметить, что алгоритм сходится, если коэффициент увеличения, соответствующий минимальному стандартному отклонению, не зависит от расстояния до отражателя. Черная (+), пурпурная (*) и синяя (*) линии на графиках соответственно относятся к сценариям SNR, SNR+PMMW и SNR+«кодовая погрешность».

Рис. 23 а. Результаты применения сценария SNR-«кодовая погрешность» по сравнению со сценариями SNR и SNR-PMMW в случае размещения отражателя на расстоянии 7 м (спутники SV1 и SV2)

Рис. 23 б. Результаты применения сценария SNR-«кодовая погрешность» по сравнению со сценариями SNR и SNR-PMMW в случае размещения отражателя на расстоянии 4 м (спутники SV1 и SV2)

Рис. 23 в. Результаты применения сценария SNR-«кодовая погрешность» по сравнению со сценариями SNR и SNR-PMMW в случае размещения отражателя на расстоянии 1 м (спутники SV1 и SV2)
При размещении отражателя на расстоянии 7 м наилучший эффект дает применение PMMW-коррекции (соответствующее стандартное отклонение изображено горизонтальной черной линией). Однако при размещении отражателя на расстоянии 4 м сценарий SNR-PMMW эквивалентен коррекции PMMW и даже дает некоторое повышение эффективности при ухудшении PMMW-коррекции. Кроме того, смешанный алгоритм дает более эффективную, или по крайней мере равную коррекцию по отношению к классическому процессу SNR, кроме случая очень близкого расположения отражателя (1 м), когда оценка PMMW ухудшается. Напротив, на расстоянии 1 м процесс SNR остается потенциально наиболее эффективным (если знаковая неоднозначность разрешена).
Литература
- Farrell J. A., Givargis T. Differential GPS Reference Station Algorithm{Design and Analysis // IEEE Transactions on Control Systems Technology. Vol. 8. No. 3. May 2000.
- Tranquilla J. M., Carr J. P., Al-Rizzo H. M. Analysis of a choke ring groundplane for multipath control in Global Positioning System (GPS).
- Ray J. K., Cannon M. E., Fenton P. Code Range and Carrier Phase Multipath Mitigation Using SNR, Range and Phase Measurements in a Multi-Antenna System. Proceedings of ION GPS-99. Nashville. September, 1999.
- Van Dierendonck A. J., Fenton P., Ford T. Theory and Performance of Narrow Correlator Spaceing in a GPS Receiver. Navigation 39. No. 3. Fall 1992.
- Irsigler M. Eissfeller B. Comparison of Multipath Mitigation Techniques with Consideration of Future Signal Structures. Proceedings of International Technical Meeting of the Satellite Division of the Institude of Navigation. IONGPS/GNSS 2003. Sept. 2003. Portland.
- Mcgraw G. A. Braasch M. S. GNSS Multipath Mitigation Using Gated and High Resolution Correlator Concept. Proceedings of the National Technical Meeting of the Satellite Division of the Institude of Navigation. ION-NTM99. Jan. 1999. San Diego.
- Townsend S. Fenton P. A Practical Approach to the Reduction of Pseudorange Multipath Errors in a L1 GPS Receiver. Proceedings of International Technical Meeting of the Satellite Division of the Institude of Navigation. ION-GPS 94. Sept. 1994. Salt Lake City.
- Axelrad P., Comp C. J., Macdoran P. F. SNRbased multipath error correction for GPS differential phase // IEEE Transactions on Aerospace and Electronic Systems. Vol. 32. No. 2. IEEE. April 1996.
- Minami M., Morikawa H., Aoyama T. Mizumachi M. An adaptive multipath estimation/elimination technique for GPS signals reception. Transactions of the Institute of Electron-applications // IEEE Transactions on Antennas and Propagation. Vol. 42. No. 7. July 1994.
- Stansell T. A., Knight J. E., Keegan R. G., Hatch R. R., Cahn C. R. Mitigation of multipath effects in GPS receivers. World patent WO 96/37789. 1996.
- Parkinson B. Spilker J. (ed.). Global Positioning System: Theory and Practice. Volumes I and II. Washington, DC: American Institute of Aeronautics and Astronautics, Inc. 1996.
- F., The paradigm of computer integrated construction applied to civil engineering, Proceedings of the 16th International Symposium on Automation and Robotics for Construction. Madrid, Spain. 1999.
- Georgiadou Y., Kleusberg A. On carrier signal multipath effects in relative GPS positioning // Manuscripta Geodaetica. Vol. 13. 1988.
- Comp C. J., Axelrad P. An adaptive SNR-based carrier phase multipath mitigation technique. Proceedings of ION GPS-96. The Institute of Navigation. Kansas City. 1996.
- Betaille D., Maenpa J., Euler H. J., P. Cross Overcoming the limitations of the phase multipath mitigation window. Proceedings of ION GPS-03. The Institute of Navigation. Portland. 2003.
19.02.2021
Глава 4 — Источники ошибок ГНСС
В главе 2 мы представили концепцию источников ошибок ГНСС. Это факторы, которые затрудняют определение точного положения ГНСС приемника. В этой главе мы более подробно рассмотрим источники этих ошибок.
Таблица 13: Источники ошибок ГНСС
Источники ошибок
Спутниковые часы
Атомные часы на спутниках ГНСС очень точны, но они немного дрейфуют. К сожалению, небольшая неточность спутниковых часов приводит к значительной ошибке в определении приемником своего местоположения. Например, ошибка часов в 10(−6) сек приводит к ошибке положения в 3 м.
Часы на спутнике контролируются наземной системой управления ГНСС и сравниваются с еще более точными часами, используемыми в ней. В данных, передаваемых спутником пользователю, содержится оценка смещения бортовых часов. Обычно передаваемая точность составляет ± 2 м, хотя она может варьироваться в зависимости от разных систем ГНСС. Чтобы получить свое более точное местоположение, ГНСС приемник должен компенсировать ошибку часов.
Одним из способов компенсации погрешности часов является загрузка точной информации о часах спутника из систем дифференциальной коррекции (SBAS) или систем точного позиционирования (PPP). В передаваемой информации содержатся поправки за ошибки бортовых часов, которые были рассчитаны системами SBAS или PPP. Более подробные сведения о системах SBAS и PPP представлены в главе 5.
Другой способ компенсации погрешности часов — настроить приемник для работы в режиме дифференциальной коррекции или кинематики реального времени (RTK). В главе 5 также подробно рассматриваются дифференциальные методы ГНСС и RTK.
Ошибки эфемерид
Спутники ГНСС движутся по очень точным, хорошо известным орбитам. Однако, параметры орбиты немного меняются. Также, как и в случае с часами спутника, небольшое изменение орбиты приводит к значительной ошибке в вычисленном положении приемника.
Наземная система управления ГНСС постоянно отслеживает орбиты спутников. Когда орбита спутника изменяется, наземная система управления отправляет поправку на спутники, и эфемериды спутников обновляются. Даже с поправками, внесенными наземной системой управления ГНСС, все еще есть небольшие ошибки в параметрах орбиты, которые могут привести к ошибке местоположения до ± 2.5 м.
Одним из способов компенсации ошибок спутниковых орбит является загрузка точной эфемеридной информации из систем SBAS или PPP, которые будут более подробно рассматриваться в главе 5.
Другой способ компенсации ошибок спутниковой орбиты — использование приемника в режиме дифференциальной коррекции или RTK. Более подробная эта информация также представлена в главе 5.
Ионосферные задержки
Ионосфера — это слой атмосферы на высоте от 80 до 600 км над Землей. Этот слой содержит электрически заряженные частицы, называемые ионами. Эти ионы задерживают прохождение спутниковых сигналов и могут вызвать значительную ошибку определения местоположения спутника (обычно ± 5 м, но эта ошибка может возрастать в периоды высокой ионосферной активности, вызванной влиянием Солнца).
Ионосферная задержка зависит от солнечной активности, времени года, сезона, времени суток и места. В результате очень трудно предсказать, насколько ионосферная задержка повлияет на расчетное местоположение.
Ионосферная задержка также изменяется в зависимости от частоты радиосигнала, проходящего через ионосферу. ГНСС приемники, которые принимают более одной частоты, например L1 и L2, могут использовать это для повышения точности. Сравнивая измерения на L1 с измерениями на L2, приемник может определить величину ионосферной задержки и удалить эту ошибку из рассчитанных координат.
Для приемников, которые могут отслеживать только одну частоту ГНСС, используются модели ионосферы для уменьшения влияния ошибок, вызванных влиянием ионосферы. Из-за различного характера ионосферной задержки модели не так эффективны, как использование нескольких частот для их устранения.
Ионосферные условия очень похожи в пределах отдельной области, поэтому спутниковые сигналы, поступающие на приемники базовой станции и подвижные приемники, имеют очень похожую задержку. Это позволяет компенсировать ионосферную задержку дифференциальными методами ГНСС и RTK.
Тропосферные задержки
Тропосфера — это ближайший к поверхности Земли слой атмосферы.
Рис. 37
Вариации задержки в тропосфере вызываются изменением влажности, температуры и атмосферного давления.
Поскольку тропосферные условия в пределах отдельной зоны очень похожи, то базовая станция и приемники подвижного приемника испытывают очень похожее влияние тропосферы. Это позволяет дифференциальным методам ГНСС и RTK компенсировать тропосферную задержку.
Приемники ГНСС также могут использовать тропосферные модели для оценки количества ошибок, вызванных тропосферной задержкой.
Собственные шумы приемника
Шум приемника добавляет к ошибке положения величины, вызванные аппаратным и программным обеспечением. Приемники ГНСС высшего класса, как правило, имеют меньшие ошибки из-за собственного шума, чем более дешевые приемники.
Влияние многолучевости
Как показано на рис. 38 многолучевое распространение происходит, когда сигнал от спутника ГНСС отражается от объекта, например, стены здания, а затем приходит к антенне приемника. Поскольку отраженный сигнал распространяется дольше, то он поступает в приемник с небольшой задержкой. Этот задержанный сигнал может привести к тому, что приемник вычислит неправильное положение.
Рис. 38
Самый простой способ уменьшить ошибки из-за многолучевого распространения это разместить ГНСС антенну в месте, удаленном от отражающих поверхностей. Когда это невозможно, приемник и антенна ГНСС должны уметь обрабатывать многолучевые сигналы.
Ошибки многолучевого распространения с большой задержкой обычно обрабатываются ГНСС приемником, а ошибки сигнала с короткой задержкой отрабатываются антенной. Благодаря применению дополнительных технологий, высокопроизводительные приемники и ГНСС антенны, как правило, лучше устраняют ошибки многолучевости.
Заключение
В этой главе описаны источники ошибок, которые вызывают погрешности при расчете позиции. В главе 5 мы опишем методы, которые используют приемники ГНСС для уменьшения этих ошибок и получения более точного местоположения.
Материалы взяты с сайта компании NovAtel. Ссылка на первоисточник: https://novatel.com/an-introduction-to-gnss
19.02.2021
Глава 4 — Источники ошибок ГНСС
В главе 2 мы представили концепцию источников ошибок ГНСС. Это факторы, которые затрудняют определение точного положения ГНСС приемника. В этой главе мы более подробно рассмотрим источники этих ошибок.
Таблица 13: Источники ошибок ГНСС
Источники ошибок
Спутниковые часы
Атомные часы на спутниках ГНСС очень точны, но они немного дрейфуют. К сожалению, небольшая неточность спутниковых часов приводит к значительной ошибке в определении приемником своего местоположения. Например, ошибка часов в 10(−6) сек приводит к ошибке положения в 3 м.
Часы на спутнике контролируются наземной системой управления ГНСС и сравниваются с еще более точными часами, используемыми в ней. В данных, передаваемых спутником пользователю, содержится оценка смещения бортовых часов. Обычно передаваемая точность составляет ± 2 м, хотя она может варьироваться в зависимости от разных систем ГНСС. Чтобы получить свое более точное местоположение, ГНСС приемник должен компенсировать ошибку часов.
Одним из способов компенсации погрешности часов является загрузка точной информации о часах спутника из систем дифференциальной коррекции (SBAS) или систем точного позиционирования (PPP). В передаваемой информации содержатся поправки за ошибки бортовых часов, которые были рассчитаны системами SBAS или PPP. Более подробные сведения о системах SBAS и PPP представлены в главе 5.
Другой способ компенсации погрешности часов — настроить приемник для работы в режиме дифференциальной коррекции или кинематики реального времени (RTK). В главе 5 также подробно рассматриваются дифференциальные методы ГНСС и RTK.
Ошибки эфемерид
Спутники ГНСС движутся по очень точным, хорошо известным орбитам. Однако, параметры орбиты немного меняются. Также, как и в случае с часами спутника, небольшое изменение орбиты приводит к значительной ошибке в вычисленном положении приемника.
Наземная система управления ГНСС постоянно отслеживает орбиты спутников. Когда орбита спутника изменяется, наземная система управления отправляет поправку на спутники, и эфемериды спутников обновляются. Даже с поправками, внесенными наземной системой управления ГНСС, все еще есть небольшие ошибки в параметрах орбиты, которые могут привести к ошибке местоположения до ± 2.5 м.
Одним из способов компенсации ошибок спутниковых орбит является загрузка точной эфемеридной информации из систем SBAS или PPP, которые будут более подробно рассматриваться в главе 5.
Другой способ компенсации ошибок спутниковой орбиты — использование приемника в режиме дифференциальной коррекции или RTK. Более подробная эта информация также представлена в главе 5.
Ионосферные задержки
Ионосфера — это слой атмосферы на высоте от 80 до 600 км над Землей. Этот слой содержит электрически заряженные частицы, называемые ионами. Эти ионы задерживают прохождение спутниковых сигналов и могут вызвать значительную ошибку определения местоположения спутника (обычно ± 5 м, но эта ошибка может возрастать в периоды высокой ионосферной активности, вызванной влиянием Солнца).
Ионосферная задержка зависит от солнечной активности, времени года, сезона, времени суток и места. В результате очень трудно предсказать, насколько ионосферная задержка повлияет на расчетное местоположение.
Ионосферная задержка также изменяется в зависимости от частоты радиосигнала, проходящего через ионосферу. ГНСС приемники, которые принимают более одной частоты, например L1 и L2, могут использовать это для повышения точности. Сравнивая измерения на L1 с измерениями на L2, приемник может определить величину ионосферной задержки и удалить эту ошибку из рассчитанных координат.
Для приемников, которые могут отслеживать только одну частоту ГНСС, используются модели ионосферы для уменьшения влияния ошибок, вызванных влиянием ионосферы. Из-за различного характера ионосферной задержки модели не так эффективны, как использование нескольких частот для их устранения.
Ионосферные условия очень похожи в пределах отдельной области, поэтому спутниковые сигналы, поступающие на приемники базовой станции и подвижные приемники, имеют очень похожую задержку. Это позволяет компенсировать ионосферную задержку дифференциальными методами ГНСС и RTK.
Тропосферные задержки
Тропосфера — это ближайший к поверхности Земли слой атмосферы.
Рис. 37
Вариации задержки в тропосфере вызываются изменением влажности, температуры и атмосферного давления.
Поскольку тропосферные условия в пределах отдельной зоны очень похожи, то базовая станция и приемники подвижного приемника испытывают очень похожее влияние тропосферы. Это позволяет дифференциальным методам ГНСС и RTK компенсировать тропосферную задержку.
Приемники ГНСС также могут использовать тропосферные модели для оценки количества ошибок, вызванных тропосферной задержкой.
Собственные шумы приемника
Шум приемника добавляет к ошибке положения величины, вызванные аппаратным и программным обеспечением. Приемники ГНСС высшего класса, как правило, имеют меньшие ошибки из-за собственного шума, чем более дешевые приемники.
Влияние многолучевости
Как показано на рис. 38 многолучевое распространение происходит, когда сигнал от спутника ГНСС отражается от объекта, например, стены здания, а затем приходит к антенне приемника. Поскольку отраженный сигнал распространяется дольше, то он поступает в приемник с небольшой задержкой. Этот задержанный сигнал может привести к тому, что приемник вычислит неправильное положение.
Рис. 38
Самый простой способ уменьшить ошибки из-за многолучевого распространения это разместить ГНСС антенну в месте, удаленном от отражающих поверхностей. Когда это невозможно, приемник и антенна ГНСС должны уметь обрабатывать многолучевые сигналы.
Ошибки многолучевого распространения с большой задержкой обычно обрабатываются ГНСС приемником, а ошибки сигнала с короткой задержкой отрабатываются антенной. Благодаря применению дополнительных технологий, высокопроизводительные приемники и ГНСС антенны, как правило, лучше устраняют ошибки многолучевости.
Заключение
В этой главе описаны источники ошибок, которые вызывают погрешности при расчете позиции. В главе 5 мы опишем методы, которые используют приемники ГНСС для уменьшения этих ошибок и получения более точного местоположения.
Материалы взяты с сайта компании NovAtel. Ссылка на первоисточник: https://novatel.com/an-introduction-to-gnss
4.1. Классификация источников ошибок, характерных для спутниковых измерений
При отработке методов высокоточных спутниковых измерений возникает необходимость тщательного исследования влияний всех возможных источников ошибок выполняемых измерений, особенностей их проявления и обоснования методов их учета. В зависимости от характера воздействия отмеченных источников возникающие при этом ошибки подразделяются на две основные группы: систематические погрешности, которые применительно к спутниковым измерениям получили название смещений, и погрешности случайного характера, которые часто отождествляют с понятием «шум».
Для погрешностей первой группы разрабатываются специальные методы их учета. Влияние второй группы удается, в большинстве случаев, минимизировать за счет использования большого массива отдельных измерений. В настоящем разделе основное внимание уделено рассмотрению ошибок систематического характера, обусловливающих появление смещений результатов измерений. При их исследовании и создании методов ослабления их влияния широкое распространение получил метод моделирования, для разработки которого приходится тщательно изучать механизм воздействия таких источников ошибок на результаты измерений с тем, чтобы на основе такого изучения разработать эффективные методы минимизации отмеченного влияния.
Исходя из анализа измерительного процесса, характерного для систем GPS и ГЛОНАСС, все основные источники ошибок можно условно разбить на три основные группы:
1) ошибки, связанные с неточностью знания исходных данных, из которых определяющая роль принадлежит погрешностям знания эфемерид спутников, значения которых должны быть известны на момент измерений;
2) ошибки, обусловленные влиянием внешней среды, среди которых выделяют такие источники, как воздействие атмосферы (ионосферы и тропосферы) на результаты спутниковых измерений, а также отраженных от окружающих объектов радиосигналов (многопутность);
147
3) инструментальные источники ошибок, к которым, как правило, относят неточность знания положения фазового центра антенны приемника, неучтенные временные задержки при прохождении информационных сигналов через аппаратуру, а также погрешности, связанные с работой регистрирующих устройств спутниковых приемников.
Наряду с перечисленными выше группами ошибок приходится учитывать и отдельные факторы, обусловливающие появление ошибок, которые не характерны ни для одной из перечисленных выше групп. В частности, к таким ошибкам могут быть отнесены погрешности, возникающие вследствие неоптимального взаимного расположения наблюдаемых спутников (геометрический фактор). Кроме того, целый ряд ошибок может возникать в процессе перехода от одной координатной системы к другой. Например, от свойственной системе GPS глобальной координатной системы WGS-84 к местной, интересующей потребителя координатной системе.
В следующих подразделах в обобщенном виде проанализированы особенности влияния основных источников ошибок.
4.2. Источники ошибок, связанные с неточным знанием эфемерцд спутников, и методы ослабления их влияния
При нахождении интересующих потребителя координат точек на земной поверхности спутниковыми методами необходимо наряду с измерением расстояний до спутника знать также его эфемериды, которые определяют местоположение спутника на момент выполнения измерений. Как уже отмечалось в подразделе 2.1, неточность знания эфемерид обусловливает соответствующие погрешности определения как абсолютных значений координат определяемых точек, так и их разностей между пунктами наблюдений. Механизм неточного знания эфемерид связан, прежде всего, с наблюдаемыми на практике расхождениями между предсказываемой (невозмущенной) и реальной (подверженной влиянию возмущающих сил) орбитами. К возмущающим силам относят различные факторы как гравитационного, так и негравитационного происхождения. Влияние различных факторов на движение спутников типа GPS и ГЛОНАСС приведено в табл. 4.1 [70, 73].
Первые из них, обусловленные притяжением спутника со стороны Землй, Луны и Солнца, поддаются достаточно эффективному моделированию. В то же время такие возмущающие факторы негравитационного происхождения, как, например, солнечное радиационное давление, плохо поддаются моделированию из-за непредсказуемости отдельных компонент, от которых зависит результирующее воздействие на спутник отмеченного давления.
148
|
Таблица 4.1 |
||
|
Возмущающие |
Максимальное |
Максимальное |
|
факторы |
возмущающее |
возмущение за 1 час, м |
|
Центральное поле |
ускорение, м/с2 |
|
|
5,65-Ю’1 |
||
|
Земли |
— |
|
|
Вторая зональная |
||
|
гармоника |
5,3-Ю-5 |
300 |
|
Гравитация Луны |
5,5-10″6 |
40 |
|
Гравитация Солнца |
310-6 |
20 |
|
Четвертая зональная |
||
|
гармоника |
ю-7 |
0,6 |
|
Солнечная радиация |
ю-7 |
0,6 |
|
Гравитационные |
||
|
аномалии |
ю-8 |
0,06 |
|
Другие факторы |
ю-8 |
0,06 |
Проведенные к настоящему времени исследования по количественной оценке отдельных факторов на эфемериды спутника свидетельствуют о том, что наибольшее воздействие на уклонения реальной орбиты от расчетной оказывает гравитационное поле Земли. В частности, из-за влияния второго гармонического коэффициента С20 такие уклонения для трехчасовых дуг орбит достигают 2 км, а для более протяженных двухсуточных дуг до 14 км. С такими значительными уклонениями нельзя не считаться при любых видах спутниковых измерений.
Суммарное гравитационное влияние масс Луны и Солнца хотя и оказывается существенно меньшим (для трехчасовых дуг уклонения от невозмущенной орбиты оцениваются величинами на уровне от 50 до 150 м), но, тем не менее, при прогнозировании значений эфемерид данное влияние также следует учитывать.
Непосредственно с гравитацией связаны также наблюдаемые на земной поверхности различного рода приливные явления, которые из-за перераспределения масс приводят к изменениям в предрассчитываемом гравитационном поле Земли, а следовательно, и к влияниям на орбитальное движение спутника. Проведенная оценка такого влияния свидетельствует о том, что уклонения спутника от расчетной орбиты из-за воздействия данного фактора даже для двухсуточных дуг лежат в пределах от 0,5 до 2 м, и этим влиянием применительно к рассматриваемым спутникам можно пренебречь.
Переходя к оценке влияния факторов негравитационного происхождения, следует заметить, что наиболее существенное влияние на неточность знания эфемерид спутников, входящих в состав систем
149
GPS и ГЛОНАСС, оказывает солнечное радиационное давление. Как показывают предрасчеты, уклонения спутников от расчетной траектории из-за воздействия прямого солнечного радиационного давления лежат в пределах от 5-6 м (для трехчасовых дуг) до 100-800 м (для двухсуточных дуг). Отмеченные предрасчеты характеризуются невысокой надежностью по следующим причинам:
1)интенсивность солнечного излучения не остается постоянной
стечением времени;
2)модель влияния данного фактора существенно изменяется при переходе спутника в зону тени и полутени;
3)эффективная поверхность спутника плохо поддается предрасчету как из-за сложной конфигурации такой поверхности, так и из-за вариаций положения спутника в пространстве.
Дополнительную неопределенность в предрасчет влияния радиационного давления вносит отраженная от земной поверхности солнечная радиация, зависящая от атмосферных условий и отражающих свойств облучаемых Солнцем участков земной поверхности.
Другим возмущающим фактором негравитационного происхождения является атмосферное торможение. При оценке влияния этого фактора следует иметь в виду, что на характерной для рассматриваемых спутников высоте около 20 тыс.км атмосфера оказывается чрезвычайно разреженной, и ее влиянием при предрасчетах орбит спутников, как правило, пренебрегают.
Обобщая оценку суммарного влияния всех перечисленных выше возмущающих факторов, заметим, что эти данные используются только для первоначального приближенного предвычисления реальных орбит спутников. Что касается получения необходимых для наземных наблюдателей значений эфемерид спутников, то на практике применяют более эффективные экспериментальные методы, базирующиеся на использовании опорных станций, установленных на пунктах с известными координатами и выполняющих непрерывные высокоточные наблюдения спутников в автоматическом режиме. За счет использования таких станций слежения решается обратная задача, состоящая в том, что с помощью одновременных измерений с нескольких (не менее трех) станций производится периодическое последовательное определение эфемерид всех наблюдаемых спутников. После соответствующей обработки на центральной станции вычисляются поправки к ранее определенным значениям эфемерид, которые с помощью передающих загружающих станций систематически (три раза в сутки, а последнее время один раз в сутки) передаются на соответствующие спутники, где вводятся в состав навигационного сообщения. Последнее, как уже отмечалось ранее, сбрасывается со спутника потребителю
150
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
Sources of User Equivalent Range Errors (UERE)
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
 C/A C/A
|
±6.7 |
| P(Y)
|
±6.0 |


Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value, 

The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,

PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).

The standard deviation of the error in estimated receiver position

The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width, 
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of 
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Special Relativity (SR) and General Relativity (GR) are two separate and distinct theories under the title of the Theory of Relativity. SR and GR make different (opposite) predictions when it comes to the clocks on-board GPS satellites. Note the opposite signs (plus and minus) below due to the different effects.
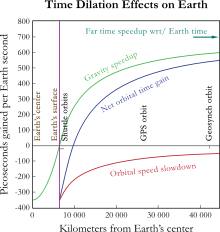
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
A number of sources of error exist due to relativistic effects[13] that would render the system useless if uncorrected. Three relativistic effects are time dilation, gravitational frequency shift, and eccentricity effects. Examples include the relativistic time slowing due to the speed of the satellite of about 1 part in 1010, the gravitational time dilation that makes a satellite run about 5 parts in 1010 faster than an Earth-based clock, and the Sagnac effect due to rotation relative to receivers on Earth. These topics are examined below, one at a time.
Special Relativity (SR)[edit]
SR predicts that clocks slow down as velocity increases. That is the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary ground clocks by a factor of 
General Relativity (GR)[edit]
GR has the opposite effect. GR predicts that clocks speed up as they get further away from a massive object (the Earth in this case). The effect of gravitational frequency shift on the GPS due to general relativity is that a clock closer to a massive object will be slower than a clock farther away. Applied to the GPS, the receivers are much closer to Earth than the satellites, causing the GPS clocks in the satellites to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development it was believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
Combined SR and GR[edit]
When combining SR and GR, the discrepancy is about +38 microseconds per day. This is a difference of 4.465 parts in 1010.[14] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[15] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
SR and GR combined
| Theory | Value | Notes |
|---|---|---|
| SR (Special Relativity) | -7.2 μs/day | Clocks slowed in Satellites due to Velocity |
| GR (General Relativity) | +45.8 μs/day | Clocks sped up in Satellites due to lower Gravity |
| Total (Combined) | +38.6 μs/day | GR is larger effect than SR |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[16] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[17] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[18] The conclusion is that the GPS satellites must compensate for GR, the physics of black holes and extreme gravity.
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to special relativity (velocity) and general relativity (gravity) and add them together.
Special Relativity (SR)[edit]
The amount due to velocity will be determined using the Lorentz transformation. This will be:

For small values of v/c, by using binomial expansion this approximates to:

The GPS satellites move at 3874 m/s relative to Earth’s center.[16] We thus determine:

This difference below 1 of 8.349×10−11 represents the fraction by which the satellites’ clocks move slower than Earth’s. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks lose 7214 nanoseconds a day due to SR effects.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[19] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
General Relativity (GR)[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:

For small values of M/r, by using binomial expansion this approximates to:

We are again only interested in the fraction below 1, and in the difference between Earth and the satellites. To determine this difference we take:

Earth has a radius of 6,357 km (at the poles) making Rearth = 6,357,000 m and the satellites have an altitude of 20,184 km[16] making their orbit radius Rgps = 26,541,000 m. Substituting these in the above equation, with Mearth = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the satellites’ clocks move faster than Earth’s. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks gain 45850 nanoseconds a day due to GR effects.
Combined SR and GR[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both the SR and GR effects of relativity.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system, a system in which simultaneity is not uniquely defined. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[20]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[21] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[22] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[23] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[24] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[25]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[26] such as defrosters, or car window tinting films[27] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[28][29] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[30]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[31] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[32] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[33] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[34] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Webb (2004), p. 32.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
Sources of User Equivalent Range Errors (UERE)
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
| C/A
|
±6.7 |
| P(Y)
|
±6.0 |
Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
The standard deviation of the error in estimated receiver position
The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Special Relativity (SR) and General Relativity (GR) are two separate and distinct theories under the title of the Theory of Relativity. SR and GR make different (opposite) predictions when it comes to the clocks on-board GPS satellites. Note the opposite signs (plus and minus) below due to the different effects.
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
A number of sources of error exist due to relativistic effects[13] that would render the system useless if uncorrected. Three relativistic effects are time dilation, gravitational frequency shift, and eccentricity effects. Examples include the relativistic time slowing due to the speed of the satellite of about 1 part in 1010, the gravitational time dilation that makes a satellite run about 5 parts in 1010 faster than an Earth-based clock, and the Sagnac effect due to rotation relative to receivers on Earth. These topics are examined below, one at a time.
Special Relativity (SR)[edit]
SR predicts that clocks slow down as velocity increases. That is the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary ground clocks by a factor of
General Relativity (GR)[edit]
GR has the opposite effect. GR predicts that clocks speed up as they get further away from a massive object (the Earth in this case). The effect of gravitational frequency shift on the GPS due to general relativity is that a clock closer to a massive object will be slower than a clock farther away. Applied to the GPS, the receivers are much closer to Earth than the satellites, causing the GPS clocks in the satellites to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development it was believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
Combined SR and GR[edit]
When combining SR and GR, the discrepancy is about +38 microseconds per day. This is a difference of 4.465 parts in 1010.[14] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[15] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
SR and GR combined
| Theory | Value | Notes |
|---|---|---|
| SR (Special Relativity) | -7.2 μs/day | Clocks slowed in Satellites due to Velocity |
| GR (General Relativity) | +45.8 μs/day | Clocks sped up in Satellites due to lower Gravity |
| Total (Combined) | +38.6 μs/day | GR is larger effect than SR |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[16] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[17] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[18] The conclusion is that the GPS satellites must compensate for GR, the physics of black holes and extreme gravity.
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to special relativity (velocity) and general relativity (gravity) and add them together.
Special Relativity (SR)[edit]
The amount due to velocity will be determined using the Lorentz transformation. This will be:
For small values of v/c, by using binomial expansion this approximates to:
The GPS satellites move at 3874 m/s relative to Earth’s center.[16] We thus determine:
This difference below 1 of 8.349×10−11 represents the fraction by which the satellites’ clocks move slower than Earth’s. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks lose 7214 nanoseconds a day due to SR effects.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[19] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
General Relativity (GR)[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:
For small values of M/r, by using binomial expansion this approximates to:
We are again only interested in the fraction below 1, and in the difference between Earth and the satellites. To determine this difference we take:
Earth has a radius of 6,357 km (at the poles) making Rearth = 6,357,000 m and the satellites have an altitude of 20,184 km[16] making their orbit radius Rgps = 26,541,000 m. Substituting these in the above equation, with Mearth = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
This represents the fraction by which the satellites’ clocks move faster than Earth’s. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks gain 45850 nanoseconds a day due to GR effects.
Combined SR and GR[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both the SR and GR effects of relativity.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system, a system in which simultaneity is not uniquely defined. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[20]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[21] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[22] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[23] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[24] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[25]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[26] such as defrosters, or car window tinting films[27] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[28][29] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[30]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[31] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[32] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[33] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[34] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Webb (2004), p. 32.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
25.11.2021
Источники ошибок GNSS
Приемник GNSS обычно выдает местоположение с номинальной погрешностью менее 15 метров с достоверностью 95 %. На результат влияет ряд шибок.
1. Атмосферные эффекты
Слабый спутниковый сигнал, подвергается воздействию во время своего прохождения через ионосферу и тропосферу. Это искажение выступает наибольшим для сигналов со спутников, расположенных вблизи горизонта.
GPS-графики для пришвартованного судна, показывающие разброс около +/- 15 метров для ряда прошлых позиций. (Функция отслеживания отслеживания) Фото A Knutas
Ошибки тропосферы вызваны ближайшим к Земле слоем атмосферы, который простирается примерно на 10 км от поверхности. Именно здесь существует «погода». Азот, кислород и водяной пар − это газы, которые могут искажать сигнал. Ошибки уменьшаются за счет компенсационных расчетов, основанных на математической модели тропосферы.
Прохождение сигнала через ионосферу, которая представляет собой слой от 50 до 1000 км, вносит другие ошибки. В этом случае на сигнал влияет присутствие электрически заряженных частиц, что приводит к ошибке синхронизации. Чтобы ограничить размер этой ошибки, так называемая маска высоты, установленная на 10°− 15°, отфильтровывает сигналы со спутников, расположенных близко к горизонту. Военные приемники могут уменьшить размер этого эффекта, используя несколько частот для измерения и моделирования ионосферы. Гражданские приемники смогут использовать дополнительную частоту L5 и затем смогут использовать несколько частот для измерения.
2. Ошибка синхронизации
Ошибка синхронизации возникает, когда часы спутника и приемника не полностью совпадают. Поскольку спутник оснащен несколькими очень точными атомными часами, эта ошибка в первую очередь вызвана приемником. Большую часть этой ошибки можно устранить, подключившись по крайней мере к четырем различным спутникам.
3. Ошибка эфемериды
Станции мониторинга, расположенные по всему экватору, постоянно регистрируют спутниковые сигналы, чтобы рассчитать их орбиты. Орбитальные данные отправляются пользователям, как часть навигационного сообщения, которое включает параметры орбиты, то есть информацию о местоположении спутников. Ошибка в этом источнике называется ошибками траектории орбиты и вносит 3−5 метров в общую величину погрешности.
4. Ошибка мультилучей
Если спутниковые сигналы отражаются от поверхностей таких, как вода, стены или поверхности на борту или трубы, до достижения приемника, то генерируются так называемые «ошибки мультилучей». Отсечение сигналов со спутников, близких к горизонту до >15°, уменьшит размер ошибок мультилучей.
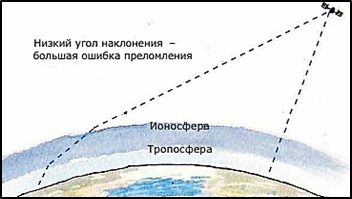
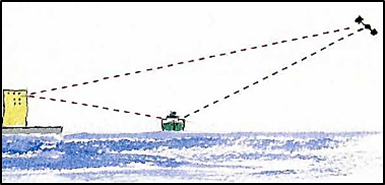
Расположение и доступность спутников
Точность определения положения снижается, когда позиционные линии пересекаются под неблагоприятными углами. Поскольку, спутниковый приемник не отображает никаких линий положения, он показывает, так называемое, значение DOP (размытие точности). Это показатель того, насколько хорошо пересекаются линии координат со спутников.
Хорошее распределение спутников по небу дает низкое значение DOP (1−3), что способствует точному построению карты положения.
Морских навигаторов больше всего интересует HDOP (Горизонтальный DOP). Другие параметры включают: PDOP (Позиционный DOP), который является ошибкой в трехмерном положении и GDOP (Геометрический DOP), который содержит PDOP и ошибку синхронизации.
Фактическая ошибка системы, умноженная на HOOP, генерирует значение позиционной погрешности. HOOP должен быть меньше 4. При загрузке HOOP, изначально велик и уменьшается по мере того, как положение вычисляется с использованием все большего и большего количества спутников. Иногда могут возникать довольно большие неточности, но они, как правило, кратковременны.

Страница в плоттере, на которой показано количество и расположение спутников. В этом случае доступно только пять и три из них находятся рядом друг с другом. Это приводит к неудачному пересечению линий положения. (Az = Азимут)
В этом случае, доступно только несколько спутников и некоторые из них находятся относительно близко друг к другу, тогда HDOP может быть необычно большим. Если ошибка преломления в атмосфере вместе с другими погрешностями составит +/-15 метров, то общее отклонение будет уже 15 х 16 = +/- 240 метров.

Высоты и азимуты на полярной диаграмме, сила сигнала в виде гистограммы
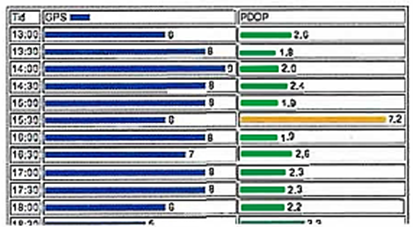
Информация PDOP с официального сайта. Это показывает, что PDOP может сильно и быстро меняться. PDOP − это описание качества трехмерной позиции. Навигатор больше всего интересует HDOP, который несколько меньше, чем PDOP.
6. Отключение GPS
Солнечные вспышки − это более холодные области, которые кажутся темнее на диске Солнца. Они показывают неравномерное распределение магнитного поля звезды. Их периодичность около 11 лет, с последним максимумом в 2012/13 годах. Процессы на Солнце оказывают влияние на ионосферу Земли и, следовательно, влияют на распространение радиоволн.
На солнечной стороне Земли эффекты солнечных пятен заблокировали приемники GPS от приема спутниковых сигналов 5 и 6 декабря 2006 года.
7. Вмешательство
Спутниковые приемники чрезвычайно чувствительны, чтобы собирать очень слабые сигналы со спутников. Один из результатов этого, то, что другие источники электромагнитного излучения могут создавать помехи для подлинных сигналов. Обнаружение и отслеживание спутников в этом случае может быть затруднено или даже невозможно.
Некоторыми естественными источниками помех являются: солнечный ветер, магнитные бури, северное сияние, поля излучения, окружающее Землю и метеорологические условия, что сказывается на работе приемника. Физические объекты между спутником и приемником также могут помешать сигналу. Высокая чувствительность приемников, к сожалению, также делает их чувствительными к этим источникам ошибок.
Относительно слабый источник излучения мощностью всего в несколько тысяч ватт, но работающий на частоте GPS, создаст помехи реальному сигналу на большой территории.
В 2001 году GPS-приемники в гавани Мосс-Лэндинг в заливе Монтерей, ощутили помехи в области диаметром около 1000 метров. После их интенсивного поиска, источник был обнаружен на предусилителе телевизионной антенны на лодке.
8. Помехи и подмена
Доступны портативные передатчики, которые намеренно блокируют, глушат или создают помехи сигналам GNSS (глушение). Этот вид оборудования был испытан во время военных маневров. Хотя технически это сложнее, можно обмануть приемник GNSS, генерируя ложные сигналы (подделка).
9. Ошибки приемника
В зависимости от его качества внутренние помехи в приемнике (ошибки программного обеспечения и синхронизации) могут привести к ошибкам в 2 метра и более.
10. Неадекватные сигналы
GPS-приемнику требуется свободной и прямая видимость со спутников. Высокие здания, густая растительность могут в достаточной степени мешать спутниковым сигналам, так, что местоположение может быть не определяться. Так же, на это сильно влияет направление, на котором расположены препятствия. Физические помехи на юге хуже всего, поскольку спутники GPS проходят на максимальной широте 55°. Это обстоятельство серьезно ограничивает количество спутников в северных широтах.
11. Надежность
Существует ряд факторов, влияющих на точность и надежность, которых можно достичь на борту. Спецификация доступности (Надежности обслуживания) указана на уровне 99,996%.
RAIM (Автономный мониторинг целостности приемника) это функция в некоторых приемниках, которая подает сигнал тревоги, когда надежность системы низкая. Функция проверяет сигналы от различных спутников и распознает, когда один из них выдает неожиданное положение. Если это так, то этот спутник удаляется из расчета. Для обнаружения ошибки функции требуется не менее пяти спутников. Если доступно шесть спутников, то программа может не учитывать плохой сигнал.
Надежность системы на судне зависит от того, как была проведена установка и техническое обслуживание, включая модернизацию!
 Старые приемники имеют более низкую производительность
Старые приемники имеют более низкую производительность
Тестирование автомобильных навигационных системВведениеНавигационные решения, работающие по сигналам глобальных навигационных спутниковых систем (ГНСС), все шире используются на автомобильном транспорте различных видов. Разнообразные приемники ГНСС, часто именуемые системами спутниковой навигации, сегодня получили распространение как на автомашинах, используемых для личных целей, так и на коммерческом и общественном транспорте. Одни автомобильные навигационные системы основаны только на технологиях ГНСС, а другие являются комбинированными решениями, в которых аппаратура спутниковой навигации сочетается с инерциальной навигационной системой (ИНС). В условиях все более широкого применения аппаратуры спутниковой навигации и повышения ее роли в деятельности многих людей и организаций (в том числе для обеспечения безопасности на транспорте и достижения коммерческого успеха) разработчики, производители и потребители этой аппаратуры должны знать, что можно ожидать от ГНСС. А для этого нужно понимать ограничения, присущие технологиям ГНСС, и проблемы, с которыми можно столкнуться при использовании этих технологий. В настоящем документе рассмотрен ряд основных источников ошибок в определении местоположения приемника ГНСС. Одни из них характерны именно для автомобильных навигационных систем, а другие свойственны любым средствам спутниковой навигации. Кроме того, здесь описаны тестовые решения компании Spirent, обеспечивающие управляемую и повторяемую имитацию условий эксплуатации автомобильных навигационных систем. С помощью этих решений можно должным образом протестировать приемник ГНСС или комбинированную инерциально-спутниковую систему (ГНСС + ИНС) на пригодность к использованию на автомобильном транспорте. Затенение антенны автомобильного приемника ГНССПриемник ГНСС лучше всего работает при соблюдении условия прямой видимости спутников ГНСС, передающих дальномерные и навигационные сигналы. Но при езде на автомобиле данное условие часто не соблюдается, что крайне негативно влияет на возможность и точность измерения псевдодальности до спутников ГНСС. Поскольку это измерение является основой спутниковой навигации, любые проблемы с его выполнением приводят к снижению точности местоположения, скорости движения и времени, определяемых приемником. В среде, окружающей автомобиль, может быть множество объектов, нарушающих условие прямой видимости и тем самым препятствующих попаданию сигналов ГНСС на антенну приемника ГНСС. Это называют затенением антенны. Ниже представлены основные объекты, которые могут затенять антенну автомобильного приемника ГНСС. Придорожные здания. Имеются в виду любые строения, примыкающие к проезжей части, которые перекрывают прямую видимость между антенной приемника ГНСС и навигационными спутниками. Мосты. Длительность блокирования сигналов ГНСС мостом зависит от его физических характеристик и скорости движения автомобиля. Туннели. При проезде на автомобиле по туннелю происходит полное затенение антенны приемника ГНСС. Подземные и многоэтажные автомобильные парковки. Они влияют на работу приемника ГНСС примерно так же, как туннели. Пользователей волнует отсутствие навигационной информации при выезде с такой парковки, когда нужно быстро выбрать правильный маршрут дальнейшего движения. Выемки. Дороги нередко прокладываются в выемках. В них может не выполняться условие прямой видимости некоторых спутников с небольшими углами места. Естественный рельеф местности и растительность (холмы, горы, впадины, деревья и другая растительность). Затенять антенну автомобильного приемника ГНСС могут и неровности рельефа местности, а также растительность. Холмы, горы и впадины могут блокировать сигналы ГНСС в зависимости от своей высоты или глубины. Деревья и другие растения ослабляют сигналы ГНСС или полностью блокируют их в зависимости от своего типа, плотности расположения, содержания влаги, густоты листвы, расположения стволов и ветвей. Движущиеся рядом и обгоняющие автомобили. Затенение зависит от их относительной скорости. Оно может быть кратковременным или длительным (например, когда высокая фура обгоняет легковой автомобиль, на котором установлен приемник ГНСС, двигаясь лишь не намного быстрее этого автомобиля). Шоссейное оборудование (фонарные столбы, дорожные знаки, эстакады). Это оборудование создает периодическое затенение, вызывающее сложное искажение принимаемых сигналов. Ошибки ГНССПомимо ошибок, вызываемых затенением антенны приемника ГНСС, существуют также ошибки в работе самой глобальной спутниковой навигационной системы, состоящей из группировки спутников и подсистемы контроля и управления. Эти ошибки не рассматриваются в настоящем документе, однако их не следует игнорировать. Ошибки приемника ГНСССам приемник ГНСС также может быть источником ошибок. Современные приемники имеют множество цифровых приемных каналов. Рост степени интеграции кремниевых микросхем дает возможность выполнять все большее число операций одновременно, что уменьшает время первого определения местоположения (TTFF). Однако с увеличением производительности растет и уровень шумов. Новые модели приемников все еще подвержены действию таких классических источников ошибок, как шум МШУ, тепловой шум ФАПЧ/АПЧ, фазовый шум гетеродина, наложение спектров (алиасинг) при аналогово-цифровом преобразовании сигналов. Для обычного современного приемника характерна систематическая ошибка менее 0,5 м (1σ) и ошибка из-за шума менее 0,2 м. Комбинированные инерциально-спутниковые навигационные системы (ГНСС + ИНС)Инерциально-спутниковые системы все шире используются на автомобильном транспорте. Основная причина этого — возникновение вышеназванных проблем и ошибок при осуществлении спутниковой навигации. Эти ошибки не могут быть полностью устранены даже при использовании оптимизированного приемника ГНСС. Во многих инерциально-спутниковых системах навигация осуществляется в основном с использованием сигналов, получаемых от автомобильных датчиков (одометров, колесных датчиков АБС, гироскопа и т. д.), а информация о местоположении, скорости и времени, предоставляемая приемником ГНСС, используются в качестве эталона для регулярной коррекции растущих погрешностей позиционирования, характерных для ИНС. Классическая проблема в работе автомобильных навигационных систем связана с движением автомобиля по криволинейному туннелю. В работе приемника ГНСС может произойти сбой, если на выходе из туннеля автомобиль будет двигаться не в том направлении, в каком он двигался, въезжая в туннель. При наличии ИНС в составе навигационного решения данные от колесных датчиков или гироскопа корректируют информацию о направлении движения при отсутствии сведений, получаемых от приемника ГНСС. Подсистема ИНС обеспечивает навигацию на всем протяжении туннеля и вне его, а также в других местах, где недоступны сигналы ГНСС (например, на подземных автомобильных парковках). Ошибки ИНСХотя комбинированная инерциально-спутниковая навигационная система решает множество проблем, присущих навигационной системе, основанной только на технологиях ГНСС, она все же подвержена ошибкам, искажающим выдаваемую навигационную информацию. Это особенно верно в отношении коммерческих автомобильных навигационных систем, где используются более дешевые и менее точные устройства вместо дорогостоящих высокоточных датчиков, применяемых в авиационной отрасли. В некоторых случаях использование колесных датчиков является единственным способом вычислить скорость изменения курса, поскольку трехмерные гироскопы слишком дороги. Типичные источники ошибок:
Возможности имитации условий эксплуатации приемников ГНСС на автотранспортеИмитатор сигналов ГНСС воспроизводит условия эксплуатации приемника ГНСС, установленного на движущемся транспортном средстве. Для этого имитатор моделирует движение транспортного средства и спутников ГНСС, характеристики их сигналов, атмосферные и другие эффекты согласно сценарию тестирования. Данный функционал позволяет тестировать приемники ГНСС и комбинированные инерциально-спутниковые навигационные системы на пригодность к использованию на автотранспорте. Касательно ошибок, рассмотренных в предыдущем разделе, важно отметить, что имитировать ошибки приемника не нужно, поскольку тестируемый приемник внесет собственные ошибки. Во всех рассмотренных здесь тестах с использованием 12-канального имитатора Spirent GSS6700, работающего под управлением ПО SimGEN, имитируется наземное транспортное средство с одной GPS-антенной, принимающей сигналы GPS L1 C/A. По сути своей имитация — это создание образа реального мира. Этот образ не может быть абсолютно точным. Но не следует думать, что для получения достоверных результатов тестирования приемников ГНСС нужна абсолютная точность воспроизведения реальных условий их эксплуатации. Более чем 25-летняя практика тестирования такого рода аппаратуры с использованием имитации влияющих на ее работу типичных факторов показала достаточно высокую точность определения ее предельных характеристик. Получаемые результаты позволяют разрабатывать и оптимизировать приемники ГНСС. Но еще важнее то, что имитатор обеспечивает абсолютную повторяемость сигналов, подаваемых на тестируемый приемник, полное управление генерацией этих сигналов и наличие детальной (вплоть до битов) информации о них. Это невозможно при использовании для тестирования реальных сигналов ГНСС. На рисунке 1 представлена концепция тестирования навигационного устройства, реализуемая с использованием имитатора GSS6700.
Затенение антенны приемника ГНСС внешними объектамиВ этом разделе будет рассмотрена имитация затенения антенны приемника ГНСС внешними (по отношению к автомобилю) физическими объектами, препятствующими приему сигналов ГНСС. Придорожные здания и выемкиИмитация затенения антенны приемника ГНСС придорожными зданиями осуществляется с помощью функциональной возможности ПО SimGEN, позволяющей пользователю задавать последовательность вертикальных плоских прямоугольных преград по левую и правую сторону от автомобиля относительно направления его движения. Пользователь задает расстояние до преграды, а также ее высоту и ширину (выражается в виде длительности воздействия преграды). Затенение антенны автомобильного приемника ГНСС произойдет, если преграда окажется на линии прямой видимости между этой антенной и спутником ГНСС. Преграды, имеющие большую высоту и находящиеся рядом с автомобилем, блокируют больше сигналов ГНСС, чем менее высокие удаленные преграды. Сложность картины затенения можно увеличивать, добавляя дополнительные преграды различных размеров и форм. Если процесс имитации запускать с разными установками времени и/или даты, характер затенения будет изменяться по причине изменения геометрического расположения спутников ГНСС. Таким образом в течение 12 часов (период обращения спутников ГНСС) можно провести серию испытаний со всевозможными вариантами затенения, создаваемого заданными преградами. На рисунке 2 показаны вертикальные плоские преграды, расположенные справа от автомобиля (преграды, находящиеся слева, не показаны для наглядности изображения).
Программное обеспечение SimGEN автоматически рассчитывает движение имитируемых спутников ГНСС и автомобиля и определяет, какие сигналы должны быть блокированы преградами (т. е. не будут выводиться имитатором). Имитация затенения в выемках осуществляется так же, как и имитация затенения придорожными зданиями. В программном обеспечении SimGEN можно сымитировать блокировку сигналов, передаваемых спутниками с небольшими углами места, задав по обе стороны от автомобиля непрерывные вертикальные плоские преграды с высотой и удалением (от автомобиля), обеспечивающими тот же угол затенения, что и выемка. На рисунке 3 показаны правая и левая преграды, расположенные на расстоянии X (от автомобиля), имеющие высоту Y и создающие такое же затенение, какое происходит при реальном профиле выемки. На рисунке 3 в области голубого цвета затенения нет.
МостыПрограммное обеспечение SimGEN имитирует затенение мостом путем выключения спутниковых сигналов на определенный период времени. Этот период характеризует влияние моста на прием сигналов ГНСС. Спутниковые сигналы можно выключать в реальном масштабе времени, используя окно управления мощностью в интерфейсе ПО SimGEN. Также эти сигналы можно выключать с помощью командного файла или системы удаленного управления, если она используется для управления имитатором. Туннели и крытые автомобильные парковкиПодобно имитации затенения мостом, недоступность сигналов ГНСС в туннелях и на крытых автомобильных парковках имитируется путем выключения сигналов всех спутников, но на более длительный период времени, в течение которого транспортное средство может изменить направление своего движения (например, если имитируется движение по непрямому тоннелю). Рельеф местностиФункция Terrain obscuration (затенение рельефом) в ПО SimGEN позволяет имитировать всенаправленное затенение антенны автомобильного приемника ГНСС рельефом местности согласно профилю рельефа, который моделируется в соответствии с редактируемыми наборами данных. В описании свойств рельефа есть поля Minimum height (минимальная высота) и Maximum height (максимальная высота). Текущая высота преграды псевдослучайным образом выбирается между этими граничными значениями по завершении каждого периода ширины преграды. Для большего реализма имитации затенения в описании свойств рельефа есть поля Minimum width (минимальная ширина) и Maximum width (максимальная ширина). Ширина очередной преграды выбирается случайным образом, а период действия данной преграды зависит от скорости автомобиля. При имитации движения автомобиля с разными скоростями по определенной траектории профиль затеняющего рельефа повторяется с соответствующей скоростью. Затенение рельефом местности является всенаправленным, поскольку по всем горизонтальным направлениям сымитированная преграда находится на одинаковом расстоянии от автомобиля. То есть она расположена по окружности, в центре которой находится автомобиль. Вне зависимости от скорости имитируемого движения по заданной траектории автомобиль остается в центре «окружности рельефа». Этот принцип показан на рисунке, где также приведено детальное описание рельефа для одного периода ширины преграды.
Движущиеся рядом и обгоняющие автомобили, шоссейное оборудованиеЗатенение этими объектами имитируется с помощью вертикальных плоских преград. Несмотря на то, что влияние (на прием сигналов ГНСС) приближающихся, обгоняющих и удаляющихся автомобилей, а также фонарных столбов и дорожных указателей точно не моделируется, удается получать достоверные результаты тестирования. Дело в том, что, как уже говорилось, точное моделирование не является необходимым условием для измерения предельных характеристик приемника ГНСС с достаточно высокой точностью. Для имитации затенения обгоняющими автомобилями, такими как грузовики с высокими бортами, используется вертикальная плоская прямоугольная преграда подходящей высоты, удаленная на нужное расстояние. Аналогично, чтобы сымитировать затенение шоссейным оборудованием, задаются вертикальные плоские преграды с соответствующими (этому оборудованию) формами и размерами. Затенение антенны приемника ГНСС внутри автомобиляДо настоящего момента мы рассматривали внешние (по отношению к автомобилю с приемником ГНСС) физические преграды, действие которых изменяется при движении автомобиля. Затенение антенны приемника ГНСС внутри автомобиля почти во всех случаях неизменно и не зависит от его движения. Таким образом, самым лучшим методом имитации этого вида затенения является использование редактора диаграммы направленности антенны (Antenna Pattern Editor) в программном обеспечении SimGEN. Имитатор принимает антенну приемника ГНСС за точку, в которой происходит моделирование сигналов. Все значения псевдодальности, мощности сигналов, их задержки и т. д. моделируются относительно этой точки. Электрические характеристики антенны определяются ее диаграммой направленности, но в случае установки приемника ГНСС в автомобиле на нее влияет затенение антенны элементами кузова автомобиля. Ориентация диаграммы направленности антенны приемника ГНСС всегда неизменна по отношению к ориентации автомобиля, так как эта антенна зафиксирована в нем или на нем. Редактор диаграммы направленности антенны позволяет задавать снижение уровня мощности сигнала и задержку по фазе для углов места от -90° до +90° и всех азимутальных направлений (360° по азимуту). Диаграмма направленности описывается с шагом до 1° по углу места и азимуту, что позволяет моделировать затенение, создаваемое элементами кузова автомобиля (дверьми, дверными стойками, крышей и т. д.), и определять области, где антенна «видит» небо (боковые окна, лобовое стекло, прозрачный люк в крыше). При этом может быть учтено ослабление сигнала из-за тонировки стекол и наличия на них нагревательных элементов. На рисунке 5 показано окно редактора диаграммы направленности антенны (с трехмерным представлением этой диаграммы) при блокировке сигнала элементами кузова автомобиля. Такая картина блокировки может быть, когда приемник ГНСС установлен на приборной панели автомобиля.
Имитация многолучевого распространения сигналов ГНСССуществует ряд методов имитации многолучевого распространения сигналов ГНСС с помощью ПО SimGEN. Некоторые из методов позволяют реализовать сложную картину многолучевости. Речь идет о следующих методах:
В настоящем документе рассматриваются два метода имитации многолучевого распространения: Fixed offset и Vertical plane. Fixed offsetЭто простейший метод имитации многолучевого сигнала, позволяющий для конкретного имитируемого спутника задать точную копию его прямого (LOS) сигнала. Для данной копии, представляющей собой отраженный сигнал, можно указать разность псевдодальности (удлинение пути следования) в метрах и снижение уровня мощности в децибелах по отношению к прямому сигналу. После этого имитатор, используя отдельный аппаратный канал, будет генерировать данный отраженный сигнал. Разность псевдодальности всегда положительна, поскольку отраженный сигнал проходит большее расстояние до приемника, чем прямой сигнал. Уровень мощности отраженного сигнала может быть либо такой же, как у прямого сигнала, либо ниже, что обозначает потери при отражении. Пользователь может задавать отраженные лучи либо в реальном масштабе времени (с помощью графического интерфейса ПО SimGEN или средств удаленного управления), либо до запуска сценария. Соответствующие команды могут быть записаны в файл User Actions. Приемник без подавления многолучевости пытается отслеживать оба сигнала (прямой и отраженный), поскольку не может определить, какой из них является основным, и измеряет псевдодальность с ошибкой. Пользователь может оценить работоспособность приемника в условиях многолучевости путем уменьшения мощности имитируемого отраженного сигнала до тех пор, пока коррелятор не перестанет отслеживать этот нежелательный сигнал. Vertical planeРанее была рассмотрена возможность использования вертикальных плоских преград для имитации затенения антенны приемника ГНСС. Эти же плоские фигуры, выступающие в роли городских зданий, могут быть использованы в рамках метода Vertical plane для геометрического моделирования отражений спутниковых сигналов от поверхностей знаний. Для заранее заданных многолучевых сигналов ПО SimGEN рассчитывает возможность отражения на основе взаимного геометрического расположения выбранных спутников, автомобиля и отражающих поверхностей. В зависимости от этого геометрического расположения антенна приемника может «видеть» только прямой сигнал, прямой и отраженный сигналы, только отраженный сигнал или «не видеть» вообще никаких сигналов. При использовании сложных плоских фигур и имитации движения автомобиля создается более сложная картина многолучевости. Важно, что любая комбинация имитируемых сигналов, даже очень сложная, будет точно повторяться в каждом тесте. На рисунке 6 показан пример имитации многолучевого распространения спутникового сигнала с помощью вертикальных плоских фигур.
Чувствительность приемника ГНССОт чувствительности приемника ГНСС зависит, насколько хорошо он может отслеживать спутниковые сигналы. Очень чувствительные приемники способны отслеживать слабые сигналы лучше, чем это делают приемники с низкой чувствительностью. Обычно наиболее важными являются два параметра чувствительности: чувствительность для захвата (acquisition sensitivity) и чувствительность для слежения (tracking sensitivity). Чувствительность для захвата — это параметр, характеризующий минимальную мощность принимаемого сигнала ГНСС, при которой приемник способен распознать его среди шумов (то есть распознать код). Чувствительность для слежения — это параметр, характеризующий минимальную мощность принимаемого сигнала ГНСС, при которой приемник способен отслеживать его и определять азимут и угол места спутников. Как правило, значение данного параметра ниже, чем чувствительность для захвата. Программное обеспечение SimGEN позволяет управлять уровнем мощности имитируемого сигнала с высокой точностью и в широком динамическом диапазоне. Управление уровнем мощности может осуществляться в реальном масштабе времени в процессе выполнения сценария или с помощью заранее написанного набора команд сценария. Управление в реальном масштабе времени выполняется посредством графического пользовательского интерфейса ПО SimGEN или удаленных команд (если имитатор управляется дистанционно). Можно управлять уровнями мощности сигналов каждого спутника в отдельности или всех спутников сразу. При этом уровни мощности могут быть отображены в абсолютных значениях или по отношению к опорной величине. Точность регулировки уровня мощности в имитаторе GSS6700 составляет 0,1 дБ в диапазоне шириной 35 дБ (-20 дБ, +15 дБ относительно номинального уровня, который для GPS-сигнала составляет -130 дБм). Это дает возможность точно определять чувствительность для захвата, чувствительность для слежения и другие базовые параметры приемника, например время первого определения местоположения при холодном, теплом или горячем старте. Более полная информация об основных характеристиках приемника ГНСС представлена в документе «Тестирование основных характеристик приемника ГНСС». В настоящем документе ранее отмечалось, что редактор диаграммы направленности антенны приемника ГНСС может быть использован для имитации затенения антенны приемника ГНСС элементами кузова автомобиля. Этот же редактор может быть использован и для имитации ослабления сигнала внешними (по отношению к автомобилю) объектами. Поскольку ПО SimGEN позволяет задавать до четырех разных диаграмм направленности, можно взять базовую диаграмму, описывающую затенение антенны внутри автомобиля, и на ее основе создать модифицированную диаграмму, добавив дополнительное ослабление сигнала при определенных углах места и азимутальных направлениях для имитации, например, устанавливаемых вдоль дорог шумозащитных экранов. В сценарии можно задать переключение с базовой диаграммы направленности на модифицированную и обратно в определенные моменты времени. На рисунке 7 показано влияние шумозащитных экранов, установленных вдоль автострады, на уровень мощности принимаемого сигнала. Действие этих экранов отражается на диаграмме направленности антенны.
Проверка автомобильного приемника ГНСС на устойчивость к радиопомехамИмитаторы моделей GSS6700 и GSS9000 имеют входной порт для подачи радиопомехи. Это дает возможность ввести внешний радиосигнал в тракт, по которому передается сымитированный сигнал ГНСС (для этого в имитаторе предусмотрен направленный ответвитель). В зависимости от характеристик введенного сигнала помехи нормальная работа приемника ГНСС может быть нарушена. Сигнал помехи, подаваемый от внешнего генератора другого производителя, не является когерентным с имитируемым сигналом ГНСС. Однако имитаторы GSS9000 и GSS6700 могут быть снабжены опциональной системой имитации помех GSS7765. Данная система обеспечивает управление определенными генераторами сигналов с помощью ПО SimGEN. Благодаря этому, могут выдаваться когерентные и некогерентные сигналы с различными видами модуляции и регулируемым уровнем мощности, что позволяет учитывать влияние расстояния от приемника ГНСС до источника помехи. На рисунке 8 показан подход к тестированию приемника ГНСС на устойчивость к радиопомехам с вводом сигнала помехи в имитатор.
Тестирование инерциально-спутниковых систем с использованием опции SimAUTOИмитаторы Spirent, управляемые программным обеспечением SimGEN, имеют опцию SimAUTO. Эта опция обеспечивает имитацию сигналов автомобильных датчиков счисления пути. Опция SimAUTO состоит из модуля Windows DLL для интеграции с ПО SimGEN и плат ввода-вывода (цифровой и цифроаналоговой), устанавливаемых в хост-компьютер, на котором функционирует ПО SimGEN. В комплект поставки также входят сигнальные кабели и кабели для передачи данных. С помощью опции SimAUTO генерируются следующие имитационные сигналы: Vehicle Heading Rate (угловая скорость изменения курса автомобиля). Это биполярный аналоговый сигнал, который может быть использован для имитации сигнала от датчика угловой скорости гироскопа. Напряжение этого сигнала пропорционально угловой скорости, с какой автомобиль изменяет свой курс. Vehicle Absolute Heading (курс автомобиля). Это биполярный аналоговый сигнал, который может быть использован для имитации сигнала от гироскопа или компаса. Напряжение этого сигнала соответствует курсу автомобиля. Turntable Control (сигналы для управления поворотным столом). Вместо имитации сигналов датчиков можно, соблюдая меры предосторожности, задействовать встроенные в навигационное устройство датчики, поместив это устройство на поворотный стол. Опция SimAUTO поддерживает такой способ тестирования навигационной аппаратуры посредством набора калибровочных процедур, помогающих определять подходящие масштабные коэффициенты и сдвиги по постоянному току. Выдаются аналоговые сигналы напряжения, определяющие скорость вращения поворотного стола и его ориентацию. Digital Speed Pulses (скорость и курс автомобиля). Семь цифровых выходов (на плате в составе SimAUTO) предназначены для имитации сигналов, информирующих о скорости автомобиля. Четыре из этих выходов могут быть задействованы для выдачи сымитированных сигналов независимых датчиков скорости вращения колеса. Ниже в таблице показано предназначение всех семи выходов.
Поступающие с представленных в таблице выходов сигналы имеют форму меандра (коэффициент заполнения 50%). Частота этих сигналов пропорциональна скорости вращения колеса и заданному пользователем коэффициенту масштабирования. Для каждого из семи сигналов может быть задан свой коэффициент масштабирования, но для сигналов, имитирующих работу четырех датчиков скорости вращения колеса, обычно используется один и тот же коэффициент масштабирования. Опция SimAUTO способна имитировать различные события, нарушающие выдачу этих сигналов или приводящие к появлению ошибок в них. События, имеющие отношение к скорости вращения колес. Можно сымитировать нулевую скорость вращения одного или нескольких колес, что имеет место при их блокировке. Также возможна имитация ускорения или замедления вращения колес, что происходит при их пробуксовке или частичном торможении. Кроме того, могут быть заданы алгоритмические ошибки, которые рассчитываются по формуле, предназначенной для имитации случайных и систематических погрешностей. События, связанные с работой гироскопа. Можно сымитировать заедание гироскопа, его шум и смещение (постоянное или зависящее от температуры). Сообщения шины CAN. SimAUTO может генерировать сообщения шины CAN в соответствии с «поведением» имитируемого датчика. На рисунке 9 представлена общая схема функционирования опции SimAUTO совместно с имитатором сигналов ГНСС, работающим под управлением ПО SimGEN.
Воспроизведение реальных полевых испытанийПрограммное обеспечение SimGEN позволяет взять данные проведенных полевых испытаний и преобразовать их в файл движения, который может быть использован для имитации траектории движения автомобиля. Таким образом, не выходя из лаборатории, можно воспроизвести аналогичную поездку. Это очень полезная возможность, которая значительно уменьшает затраты времени и денег на проведение полевых испытаний (с проездом на автомобиле по заданному маршруту). Можно воспроизвести и блокировку сигнала (вследствие затенения антенны приемника) при использовании подходящих данных. Сообщения NMEA 0183Большинство приемников ГНСС выводят данные в формате NMEA, в котором предусмотрены сведения о местоположении, скорости, отношении сигнал/шум и др. Эти данные используются программным обеспечением, управляющим приемником, например для вывода информации о местоположении последнего на экран. Утилита для преобразования сообщений NMEAПреобразование сообщений NMEA осуществляется с помощью приложения SimPROCESS, которое входит в состав ПО SimGEN. Приложение SimPROCESS представляет собой скомпилированное отдельное приложение MATLAB, которое использует среду выполнения MATLAB и совершенно бесплатно предоставляет пользователям ПО SimGEN широкие возможности анализа и визуализации данных. Это приложение можно рассматривать как набор программных средств (утилит), использующих стандартный пользовательский интерфейс для доступа к любым инструментам SimPROCESS. Утилита преобразования данных NMEA в информацию о движении преобразует журнальный файл приемника, содержащий сообщения NMEA GGA, в файлы движения с расширением UMT, которые воспроизводит ПО SimGEN. Файл UMT содержит команды управления движением, выполняемые с интервалом в 100 мс. Кроме того, эта утилита использует информацию о значениях отношения сигнал/шум (SNR), содержащуюся в сообщениях NMEA GSV, для воспроизведения уровней мощности спутниковых сигналов, поступающих на антенну приемника. Это позволяет смоделировать реальное полевое тестирование, где происходило затенение антенны приемника, что было отражено в GSV-сообщении в составе записанных в журнал данных (а значит, может быть воспроизведено имитатором). Таким образом можно повторить любое затенение, встретившееся на реальном маршруте, без использования функций моделирования затенений в ПО SimGEN. Основным недостатком этого подхода следует считать тот факт, что имитируемая траектория не всегда точно совпадает с истинным местоположением приемника, которое было при записи данных NMEA, поскольку приемник работает в реальных условиях, снижающих точность навигации, и возможны ошибки в сигналах ГНСС. Впрочем, можно вручную корректировать данные NMEA для устранения наиболее очевидных ошибок (и компания Spirent рекомендует это делать). Приложение SimGEN точно конвертирует данные NMEA, независимо от их первоначальной точности. Важным моментом является то, что один и тот же процесс имитации можно выполнять необходимое число раз. И хотя данные NMEA могут быть неточны по отношению к реальному маршруту, имитируемая траектория точно повторяется в разных испытаниях. В ряде случаев полезно иметь возможность использовать неточную, но повторяемую траекторию. Во многих автомобильных спутниковых навигационных системах применяются функции привязки к дороге. Эти функции можно тестировать и оптимизировать, используя неточные траекторные данные. ЗаключениеНадлежащее тестирование навигационной аппаратуры потребителей на этапах ее разработки, интеграции и производства имеет большое значение для обеспечения и доказательства пригодности этой аппаратуры к эксплуатации в заданных условиях. В настоящем документе рассмотрен ряд основных проблем с применением приемников ГНСС на автомобильном транспорте. Показаны возможности использования имитаторов сигналов ГНСС для выполнения точных тестов с моделированием этих проблем. С помощью имитатора данные проблемы можно воспроизводить поочередно, в любой комбинации или все вместе при полном управлении параметрами имитации. Описанные здесь подходы к тестированию повышают его эффективность, обеспечивают максимальное соответствие процедур тестирования предназначению разрабатываемых продуктов, ускоряют их разработку. наверх |

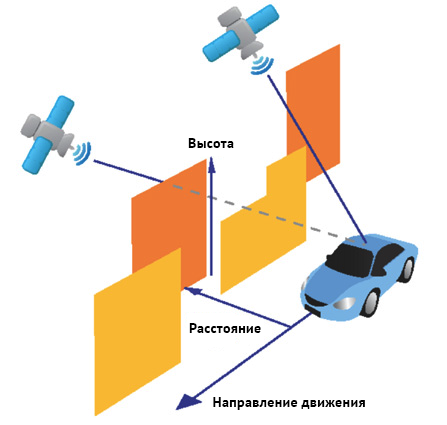
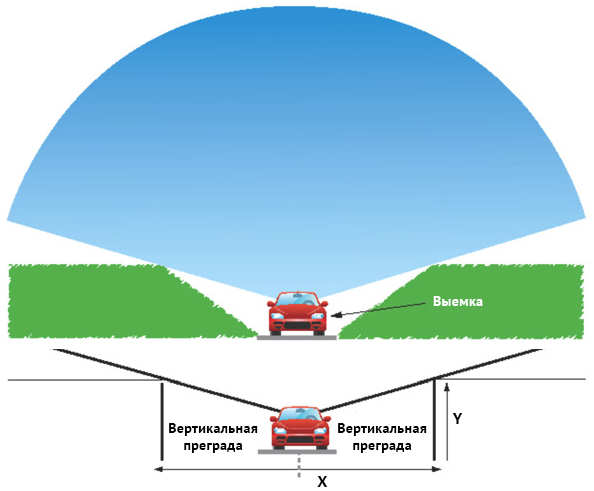
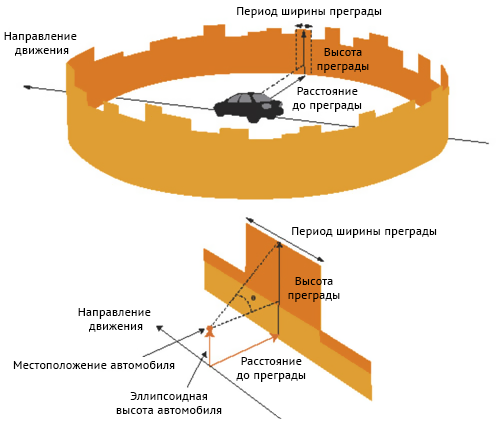
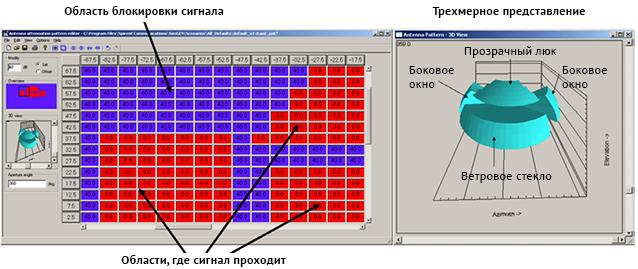
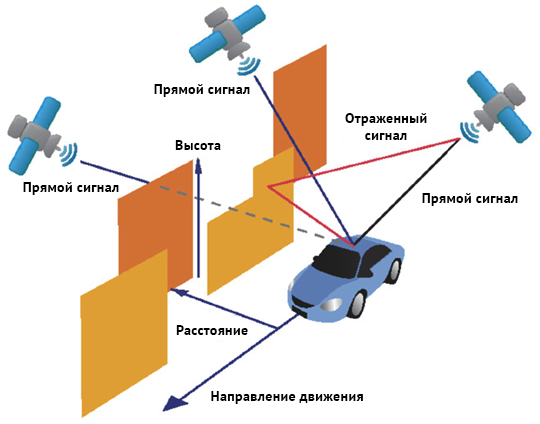
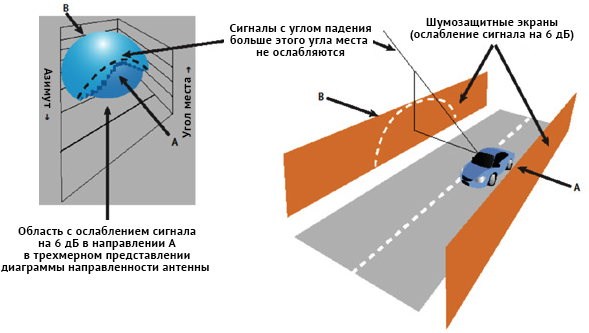
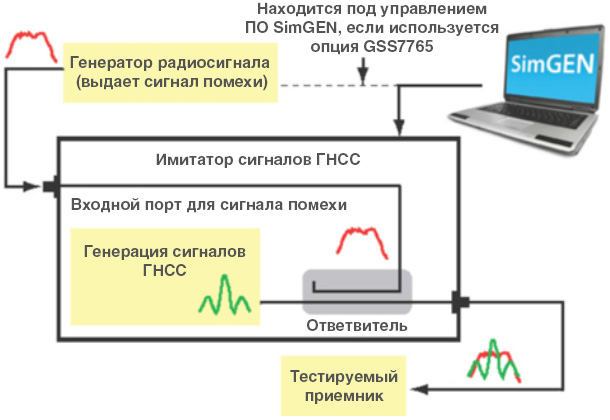
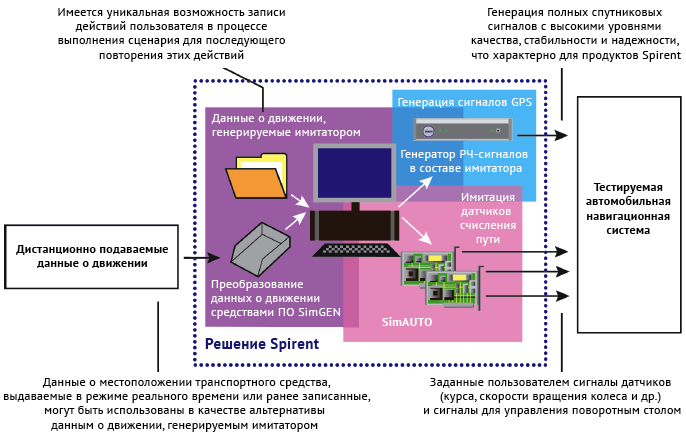
|
Методы геодезической съемки |
Соответствующие ситуации |
|
Статическая съемка |
Когда требуется измерение большой |
|
Быстрая статическая съемка |
Когда требуется высокая точность на |
|
Кинематическая съемка Стою – Иду (Stop and Go) |
Когда требуется поведения наблюдений |
|
Непрерывная кинематическая съемка |
Динамическая топографическая съемка |
|
Кинематическая съемка в реальном |
Вынесение объекта в натуру, |
Для каждого
метода геодезической съемки используются разные методики и время наблюдений.
При проведении геодезической съемки для постобработки необходимо следовать
нижеуказанным правилам:
·
Приемники,
проводящие постобработку, должны работать синхронно;
·
Приемники,
проводящие постобработку, должны работать с одинаковыми или общими интервалами
эпох.
Статическая съемка является наиболее точным методом
геодезической съемки. При статической съемке антенна устанавливается над точкой
на штативе или другой неподвижной подставке. Используются, по крайней мере. два
приемника: один на точке с известными координатами, а другой – на точке,
координаты которой надо определить: наблюдения проводятся синхронно с
одинаковыми интервалами эпох и при наличии, по крайней мере, четырех «общих»
спутниках.
Хотя
статическая съемка и является наиболее точным методом геодезической съемки, она
требует и наибольшее время наблюдений. Время сеанса обычно составляет около
одного часа: интервалы сбора данных длятся 30 секунд. Время сеанса наблюдений,
впрочем, может варьироваться в зависимости от условий окружающей среды и длины
базовой линии. Несмотря на то, что статическая съемка может проводиться при
использовании как одно так и двухчастотных измерениях, для одночастотных
приемников длина базовых линий обычно ограничена 10 км. Двухчастотная съемка позволяет
работать на базовых линиях длиной более 10 км и устраняет ионосферные погрешности. Для
измерений на таких длинных базовых линиях вариант двухчастотных измерений
просто необходим.
Статическая
съемка требует синхронных наблюдений, по крайней мере, двумя приемниками. Для
увеличения эффективности работы целесообразно проводить наблюдения на нескольких
точках одновременно, используя для съемки соответственное количество приемников.
С помощью программного обеспечения для постобработки можно одновременно анализировать
и обрабатывать данные нескольких приемников.
В сравнении с
другими методами геодезической съемки, статическая съемка требует большей
продолжительности сеанса наблюдений. Вместе с тем надо отметить, что метод позволяет
разрешить сопутствующие измерениям проблемы, такие как пропуск цикла и многолучевость,
и обеспечить высокий уровень точности.
Быстрая статическая съемка в значительной мере то же самое, что
и статическая съемка за тем исключением, что сеанс измерений может проводиться
за более короткий период времени и требует двухчастотных GPS/ГЛОНАСС приемников.
В общем,
быстрая статическая съемка является эффективной при длине базовой линии в пределах
10 км,
времени синхронных наблюдений около 20 минут и периоде сбора данных 15 секунд.
Однако, эффективная длина базовой линии и время сеанса может варьироваться в
зависимости от количества отслеживаемых спутников, значения DOP (геометрического фактора ухудшения
точности), наличия или отсутствия пропусков циклов, влияния многолучевости, а
также других факторов и внешних условий.
Благодаря
укороченному времени сеанса, эффективность работы в режиме быстрой статической
съемки возрастает. С другой стороны объем полученных данных меньше, чем при
статической съемке, так что точность и надежность результатов измерений может
оказаться ниже.
Для
увеличения точности получаемых данных используйте программное обеспечение для
планирования работ, чтобы гарантировать достаточное количество спутников и
хорошее значение DOP, а также другие оптимальные условия на период измерений.
Осуществлять тщательную подготовку перед проведением измерений.
При кинематической
съемке на базовой станции проводится статическая съемка в точности как
это описано для метода статической геодезической съемки; при этом подвижная
станция осуществляет набор данных во время движения. Различают два вида
кинематической съемки: с остановками (Stop and GO) и непрерывная.
Так же как и
при статической съемке, кинематическая съемка требует, чтобы спутниковые сигналы
принимались одновременно, по крайней мере, двумя приемниками, причем, не менее
четырех спутников было бы «общими». Один из приемников работает в качестве
базовой станции. Так же как и при
статической съемке, эта станция осуществляет набор статических данных с помощью
антенны, установленной на штативе или другой неподвижной подставке. Другой
приемник установлен на подвижном основании и проводит набор полевых данных при
помощи антенны, закрепленной на вешке или другом подвижном носителе. Как и при
других методах съемки, процесс наблюдений может выполняться одновременно несколькими
подвижными приемниками и одной общей базовой станцией.
При
кинематической съемке в режиме Стою – Иду, повторно выполняются предельно
короткие статические измерения (при остановке) и измерения в процессе движения,
делая, таким образом, возможным съемку в большого количества определяемых
точек. Так как этот метод требует непрерывного потока данных, необходимо
контролировать непрерывное слежение за спутниками в процессе наблюдений и
бесперебойную запись данных в процессе движения. Соответственно стремиться к
наиболее благоприятным условиям наблюдений. При кинематической съемке время
статического отрезка измерений чрезвычайно мало: как правило, время стояния на
точке длится порядка одной минуты и содержит 12 эпох по пять секунд каждая. Чем
больше время статического отрезка, тем выше будет точность полученных данных. Аналитические
результаты, полученные этим методом, соответствуют местоположению,
определенному статическим методом.
Непрерывная
кинематическая съемка представляет собой метод безостановочной геодезической
съемки и используется для достижения последовательного, высокоточного определения
точек траектории движущегося тела и т.д. При этом методе аналитические результаты
получаются для каждого интервала времени эпохи.
Кинематическая съемка в реальном
масштабе времени (RTK) – это
методика работ для получения точных координат в реальном времени, и требует
специального контроллера для обработки и сохранения результатов. При съемке в
режиме RTK так же, как и при кинематической
съемке, один приемник служит в качестве базовой станции и осуществляет наблюдения
с антенной, закрепленной на штативе или другой неподвижной подставке. Другой же
приемник работает на подвижном основании и проводит измерения с антенной на
вешке и перемещаемой по определяемым точкам.
В отличие от
кинематической съемки с постобработкой, базовая станция и подвижный приемник,
связаны при помощи радиотелеметрической системы или другой системы связи.
Данные коррекции по фазе несущей и другие данные, получаемые на базовой
станции, передаются на подвижный приемник через модем. Благодаря этим
передаваемым данным и собственным данным, на подвижном комплекте немедленно
проводится анализ данных по базовой линии, и сразу выдаются результаты
вычислений.
Для
проведения геодезической съемки в режиме RTK необходима
инициализация контроллера, осуществляющего разрешение неоднозначности,
инициализация может осуществляться даже в процессе движения.
5. Точность определения координат.
Принципиально
точность определения координат объектов с помощью СНС GPS и ГЛОНАСС примерно
одинакова. Сигналы в системе GPS излучаются на частоте 1227 МГц и 1575 МГц, а
ГЛОНАСС — 1250 МГц и 1600 МГц и кодируются для организации так называемого
«селективного (избирательного) доступа». Оба сигнала используют два кода.
Первый из них в GPS называется «легко обнаруживаемый», а в ГЛОНАСС — «стандартной
точности». Второй код в GPS называется «закрытый» (в ГЛОНАСС — «высокой
точности») и предназначен для санкционированного использования. Для геодезии
высокая точность позиционирования является важнейшим свойством. Современные
геодезические приемники способны определять координаты с точностью до 1 м, а в дифференциальном
режиме (DGPS) до 5 мм.
DGPS использует дополнительный, фиксированный в одной точке GPS-приемник для
определения корекции спутниковых сигналов.
На точность
определения координат существенное влияние оказывают ошибки, возникающие при
выполнении процедуры измерений. Природа этих ошибок различна.
Неточное определение
времени. При всей
точности временных эталонов ИСЗ существует некоторая погрешность шкалы времени
аппаратуры спутника. Она приводит к возникновению систематической ошибки
определения координат около 0.6
м.
Ошибки вычисления
орбит. Появляются
вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в
аппаратуре приемника. Эта погрешность также носит систематический характер и
приводит к ошибке измерения координат около 0.6 м.
Инструментальная
ошибка приемника.
Обусловлена, прежде всего, наличием шумов в электронном тракте приемника.
Отношение сигнал/шум приемника определяет точность процедуры сравнения
принятого от ИСЗ и опорного сигналов, т.е. погрешность вычисления псевдодальности.
Наличие данной погрешности приводит к возникновению координатной ошибки порядка
1.2 м.
Многопутность
(многолучевость) распространения сигнала. Появляется в результате вторичных отражений сигнала
спутника от крупных препятствий, расположенных в непосредственной близости от
приемника (Рис. 11). При этом возникает явление интерференции, и измеренное
расстояние оказывается больше действительного. Такому сигналу требуется больше
времени для достижения приемника, чем прямому. Это увеличение времени заставляет
приемник считать, что спутник находится на большем расстоянии, чем на самом
деле и это увеличивает ошибку при определении положения. Аналитически данную
погрешность оценить достаточно трудно, а наилучшим способом борьбы с нею
считается рациональное размещение антенны приемника относительно препятствий. В
результате воздействия этого фактора ошибка определения псевдодальности может
увеличиться на 2.0 м.
Многопутность (многолучевость) распространения
сигнала
Ионосферные задержки
сигнала. Ионосфера –
это ионизированный атмосферный слой в диапазоне высот 50 – 500 км, который содержит
свободные электроны. Наличие этих электронов вызывает задержку распространения
сигнала спутника, которая прямо пропорциональна концентрации электронов и
обратно пропорциональна квадрату частоты радиосигнала. Для компенсации
возникающей при этом ошибки определения псевдодальности используется метод
двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках).
Линейные комбинации двухчастотных измерений не содержат ионосферных
погрешностей первого порядка. Кроме того, для частичной компенсации этой
погрешности может быть использована модель коррекции, которая аналитически
рассчитывается с использованием информации, содержащейся в навигационном
сообщении. При этом величина остаточной немоделируемой ионосферной задержки
может вызывать погрешность определения псевдодальности около 10 м.
Тропосферные задержки
сигнала. Тропосфера
– самый нижний от земной поверхности слой атмосферы (до высоты 8 – 13 км). Она также
обуславливает задержку распространения радиосигнала от спутника. Величина
задержки зависит от метеопараметров (давления, температуры, влажности), а также
от высоты спутника над горизонтом. Компенсация тропосферных задержек
производится путем расчета математической модели этого слоя атмосферы.
Необходимые для этого коэффициенты содержатся в навигационном сообщении. Тропосферные
задержки вызывают ошибки измерения псевдодальностей в 1 м.
Распространение сигнала в атмосфере
Земли
Геометрическое
расположение спутников. При вычислении суммарной ошибки необходимо еще учесть взаимное положение
потребителя и спутников рабочего созвездия. Если, например, приемник «видит”
четыре спутника и все четыре расположены в северном и западном направлениях, то
спутниковая геометрия скорее плохая. Причем вплоть до того, что приемник вообще
не сможет определить местоположение, потому что все расстояния, измеренные до
спутников, будут лежать в одном глобальном направлении. Это означает, что триангуляция
будет плохой и что область пересечения построенных прямых будет довольно
большой (т.е. область вероятного положения будет занимать значительное
пространство и точно указать координаты невозможно). В этом случае, даже если
приемник выдает некоторые значения координат, их точность не будет достаточно
хороша. Если же эти четыре спутника будут находиться в разных направлениях, то
точность значительно возрастет. Предположим, что они расположены равномерно по
сторонам горизонта – на севере, востоке, юге и западе. Тогда, очевидно,
геометрия будет очень хорошей. Область, определяемая пересечением соответствующих
прямых будет невелика и мы можем быть уверены в правильности рассчитанного местоположения.
Геометрия
спутников становится особенно важной при использовании GPS-приемника в городе,
среди высоких зданий, в горах или в глубоких ущельях. Если сигналы от некоторых
спутников оказываются экранированы, то точность определения местоположения
будет зависеть от оставшихся «видимыми” спутников (а от их количества –
возможность провести расчеты вообще). Чем большая часть неба заслонена
искусственными или естественными предметами, тем более сложно определить
положение. Хорошие модели GPS-приемников показывают не только сколько спутников
находятся в зоне видимости, но и где они расположены на небе (направление и
высоту над горизонтом) для того, чтобы определить, не экранируется ли сигнал от
данного спутника.
Для этого
вводится специальный коэффициент геометрического ухудшения точности PDOP (Position
Dilution Of Precision), на который необходимо умножить все перечисленные выше
ошибки, чтобы получить результирующую ошибку. Величина коэффициента PDOP зависит
от взаимного расположения спутников и приемника. Она обратно пропорциональна
объему фигуры, которая будет образована, если провести единичные векторы от
приемника к спутникам. Большое значение PDOP говорит о неудачном расположении
ИСЗ и большой величине ошибки.

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:
Скачиваний:
91
Добавлен:
15.02.2015
Размер:
947.2 Кб
Скачать
32
Наиболее мощные средства такого типа представляют собой не отдельные приемники, а целые измерительно-вычислительные станции и комплексы. Они снабжены и линиями радиосвязи, и внешними компьютерами, и разветвленными программами постпроцессорной, так называемой камеральной обработки данных, накопленных во время полевых измерений.
Если приемники навигационного класса обеспечивают исключительную точность и безопасность навигации, то эти уникальные устройства совершают революцию в созидательной деятельности Человека. И с каждым годом открываются все новые и новые области их применения.
В третью группу областей применения методов и технических средств GPS мы условно отнесем все, что перекрывается информационноизмерительными системами. Они строятся на основе сопряжения и сочетания возможностей GPS и других технических средств, позволяющими получить новые качества в решении старых, но исключительно важных практических проблем.
5.2 Источники ошибок
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
На степень точности вычисления координат влияет ряд факторов, зависящих от процедуры их определения. Их принято называть факторами снижения точности. Как правило, при вычислении координат учитываются следующие стандартные факторы снижения точности:
Геометрический фактор снижения точности (GDOP) определяет степень влияния погрешностей псевдодальности (характеризующей меру удаленности пользователя от GPS-спутника) на точность вычисления координат. Зависит от положения спутника относительно GPS-приемника и от смещения показания GPS-часов. Различие значений псевдодальности и фактической дальности связано со смещением показаний часов GPS-
33
спутника и потребителя, с задержками распространения и другими ошибками.
Горизонтальный фактор снижения точности (HDOP) показывает степень влияния точности определения горизонтали на погрешность вычисления координат.
Фактор снижения точности определения положения (PDOP) — это безразмерный показатель, описывающий, как погрешность псевдодальности влияет на точность определения координат.
Относительный фактор снижения точности (RDOP), по сути, равен фактору снижения точности, нормализованному на период 60 с.
Временной фактор снижения точности (TDOP) описывает степень влияния погрешности показаний часов на точность определения координат.
Вертикальный фактор снижения точности (VDOP) показывает степень влияния погрешности в вертикальной плоскости на точность определения координат.
Кроме того, основными источниками ошибок, влияющими на точность навигационных вычислений в GPS-системе, являются:
1.Погрешности, обусловленные режимом селективного доступа
(Selective availa-bility, S/A). Используя данный режим, Министерство Обороны США намеренно снижает точность определения местонахождения для гражданских лиц. В режиме S/A формируются ошибки искусственного происхождения, вносимые в сигнал на борту GPS-спутников с целью огрубления навигационных измерений. Такими ошибками являются неверные данные об орбите спутника и искажения показаний его часов за счет внесения добавочного псевдослучайного сигнала. Величина среднеквадратического отклонения из-за влияния этого фактора составляет, примерно, 30 м. В 2002 году решением президента США этот режим отменен.
2.Ионосферные задержки сигнала. Ионосфера – это ионизированный атмосферный слой в диапазоне высот 50 – 500 км, который содержит
34
свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала. Задержки распространения сигналов при их прохождении через верхние слои атмосферы приводят к ошибкам порядка 20-30 м днем и 3-6 м ночью. Для компенсации возникающей при этом ошибки определения псевдодальности используется метод двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках). Несмотря на то, что навигационное сообщение, передаваемое с борта GPS-спутника, содержит параметры модели ионосферы, компенсация фактической задержки, в лучшем случае, составляет 50%. При этом величина остаточной немоделируемой ионосферной задержки может вызывать погрешность определения псевдодальности около 10 м.
3.Тропосферные задержки сигнала. Тропосфера – самый нижний от земной поверхности слой атмосферы (до высоты 8 – 13 км). Она также обуславливает задержку распространения радиосигнала от спутника. Величина задержки зависит от метеопараметров (давления, температуры, влажности), а также от высоты спутника над горизонтом. Компенсация тропосферных задержек производится путем расчета математической модели этого слоя атмосферы. Необходимые для этого коэффициенты содержатся в навигационном сообщении. Тропосферные задержки вызывают ошибки измерения псевдодальностей в 1 м. Значения погрешностей этого вида при использовании сигналов с С/А-кодом не превышают 30 м.
4.Эфемеридная погрешность. Ошибки обусловлены расхождением между фактическим положением GPS-спутника и его расчетным положением, которое устанавливается по данным навигационного сигнала, передаваемого с борта спутника. Значение погрешности обычно не больше 3 м.
5.Погрешность ухода шкалы времени спутника вызвана расхождением шкал времени различных спутников. Устраняется с помощью наземных
35
станций слежения или за счет компенсации ухода шкалы времени в дифференциальном режиме определения местоположения.
6.Погрешность определения расстояния до спутника является статистическим показателем. Он вычисляется для конкретного спутника и заданного интервала времени. Ошибка не коррелированна с другими видами погрешностей. Ее величина обычно не превышает 10 м.
7.Неточное определение времени. При всей точности временных эталонов ИСЗ существует некоторая погрешность шкалы времени аппаратуры спутника. Она приводит к возникновению систематической ошибки определения координат около 0.6 м.
8.Ошибки вычисления орбит. Появляются вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в аппаратуре приемника. Эта погрешность также носит систематический характер и приводит к ошибке измерения координат около 0.6 м.
9.Инструментальная ошибка приемника. Обусловлена, прежде всего,
наличием шумов в электронном тракте приемника. Отношение сигнал/шум приемника определяет точность процедуры сравнения принятого от ИСЗ и опорного сигналов, т.е. погрешность вычисления псевдодальности. Наличие данной погрешности приводит к возникновению координатной ошибки порядка 1.2 м.
10.Многопутность распространения сигнала. Появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. При этом возникает явление интерференции, и измеренное расстояние оказывается больше действительного. Аналитически данную погрешность оценить достаточно трудно, а наилучшим способом борьбы с нею считается рациональное размещение антенны приемника относительно препятствий. В результате воздействия этого фактора ошибка определения псевдодальности может увеличиться на 2.0 м.
36
11. Геометрическое расположение спутников. При вычислении суммарной ошибки необходимо еще учесть взаимное положение потребителя и спутников рабочего созвездия. Для этого вводится специальный коэффициент геометрического ухудшения точности PDOP (Position Dilution Of Precision), на который необходимо умножить все перечисленные выше ошибки, чтобы получить результирующую ошибку. Величина коэффициента PDOP зависит от взаимного расположения спутников и приемника. Она обратно пропорциональна объему фигуры, которая будет образована, если провести единичные векторы от приемника к спутникам. Большое значение PDOP говорит о неудачном расположении ИСЗ и большой величине ошибки. На Рис.5 приведены примеры удачного (а) и неудачного (б) геометрического положения спутников. Типичное среднее значение PDOP колеблется от 4 до
6.
Следует отметить, что точность определения координат связана не только с прецизионным расчетом расстояния от GPS-приемника до спутников, но и с величиной погрешности задания месторасположения самих спутников. Для контроля орбит и координат спутников и предназначены наземные станции слежения, системы связи и центр управления, подчиняющиеся Министерству Обороны США. Станции слежения постоянно ведут наблюдение за всеми спутниками GPS-системы и передают данные об их орбитах в центр управления, где вычисляются уточненные элементы траекторий и поправки спутниковых часов. Указанные параметры вносятся в «альманах» и передаются на спутники, а те, в свою очередь, отсылают эту информацию всем работающим GPS-приемникам. Кроме того, существует еще множество специальных систем, увеличивающих точность навигации. Например, особые схемы обработки сигнала снижают ошибки от интерференции (взаимодействия прямого спутникового сигнала с отраженным сигналом, например, от зданий).

37
5.3 Повышение точности определения координат
Точность определения координат потребителя, которую обеспечивают системы GPS и GLONASS, составляет около 10 м. Однако для многих приложений, таких как навигация автомобилей, судов на узких фарватерах, геодезии, навигации летательных аппаратов, подобная точность недостаточна. Для увеличения точности местоопределения был предложен метод дифференциальной навигации, который обеспечивает точности до нескольких десятков сантиметров.
Дифференциальный режим реализуется с помощью контрольного навигационного приёмника, называемого базовой станцией. Базовая станция устанавливается в точке с известными географическими координатами. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными координатами, базовый навигационный приёмник формирует поправки, которые передаются потребителям по каналам связи (рис. 10).
рис 10. Метод DGPS увеличивает точность данных
Приёмник потребителя учитывает принятые от базовой станции поправки при решении навигационной задачи. Это позволяет определить его координаты с точностью до одного метра.
38
Различают два метода вычисления поправок:
•метод коррекции координат, когда в качестве дифференциальных поправок с базовой станции передают добавки к измеренным в определяемом пункте координатам. Недостатком этого метода является то, что приёмники базового и определяемого пунктов должны работать по одному рабочему созвездию. Это неудобно, поскольку все потребители, использующие дифференциальные поправки, должны работать по одним и тем же ИСЗ;
•метод коррекции навигационных параметров, при использовании которого на базовой станции определяются поправки к измеряемым параметрам (например, псевдодальностям) для всех спутников, которые потенциально могут быть использованы потребителями. Эти поправки передаются потребителям и учитываются при решении навигационной задачи. Недостатком этого метода является повышение сложности
аппаратуры потребителей.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между потребителем и базовой станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. Эти ошибки в значительной мере компенсируются при близком расположении базовой станции и приёмника потребителя. Поэтому зона обслуживания базовой станции составляет не более 500 км.
Передача дифференциальных поправок от базовой станции к потребителю может осуществляться с помощью телефонной или радиосвязи, по системам спутниковой связи (например, INMARSAT), а также с использованием технологии передачи цифровых данных RDS (Radio Data System) на частотах FM-радиостанций. В настоящее время во многих странах уже действует развитая сеть базовых (дифференциальных) станций, постоянно транслирующих поправки на определённую территорию.
39
Например, в США дифференциальные поправки передаются береговой охраной через морские радиобуи, работающие на частоте 283,5–325 кГц. Пользоваться этим сервисом может любой желающий. Под СанктПетербургом в феврале 1998 года была установлена первая базовая станция. Она передаёт дифференциальные поправки на частоте 298,5 кГц.
Примером глобальной сети DGPSпоправок может служить система OmniSTAR . Она использует сеть станций для сбора информации об ошибках, вводимых в GPSсигнал Министерством обороны США.
Собранные данные распределяются одним из центров управления сетью. Всего существует 3 центра управления сетью OmniSTAR по всему миру. Оттуда данные передаются на борт к одному из семи геостационарных спутников, распределенных по всей земной поверхности. Далее каждый спутник передает данные о дифференциальных GPSпоправках в пределах своей области обслуживания. Сигналы поправок системы OmniSTAR могут быть получены через радиоканал GPSприемником и доступны по подписке.
Сеть OmniSTAR обладает устойчивостью и избыточностью:
Все станции сбора информации имеют дублированные каналы связи с соответствующим центром управления сетью;
Европейский спутник использует два канала, переключение между которыми осуществляется автоматически;
Европейский континент имеет два уровня обслуживания дифференциальными GPSпоправками;
Формируемые системой OmniSTAR поправки не зависят от какойлибо конкретной станции;
Сигнал системы OmniSTAR сигнал не подвержен влиянию гроз или электрических полей.
Работа сети непрерывно контролируется центрами управления сетью. Имеются два различных типа подписки на систему OmniSTAR: VBS (Virtual Base Station) и VRC (Virtual Reference Cell).
40
VBS — подписка. Внутри приемника рассчитывается оптимальная для данного положения приемника дифференциальная поправка. При этом используется информация от всех станций сбора данных. Такая методика называется технологией Виртуальной Базовой Станции (VBS).
VRCподписка. Данный вид подписки является более дешевым вариантом для пользователя, постоянно работающего в пределах ограниченной территории. При этом для формирования сигналов дифференциальных поправок используются сигналы всех станций, но поправки пересчитываются не на любую точку местонахождения пользователя, а только на одну указанную пользователем точку.
Зона действия системы OmniSTAR захватывает почти всю поверхность земного шара (Рис. 11)
Рис. 11 Обзор дифференциальных систем спутниковой навигации позволяет
сделать вывод о том, что принципы построения глобальных дифференциальных систем в наибольшей степени соответствуют особенностям и условиям, существующим в России. При огромной и очень неравномерно населённой территории России развёртывание плотной сети наземных станций сбора информации, необходимых для вычисления подробных карт вертикальных ионосферных задержек, будет очень дорогостоящим. В глобальных системах дифференциальной навигации
41
ответственность за устранение ионосферных ошибок возлагается на потребителя. Для этого требуется, чтобы пользователи такой системы были снабжены двухдиапазонными навигационными приёмниками, что естественно повысит стоимость аппаратуры потребителя. Однако можно полагать, что при массовом производстве такой аппаратуры стоимость каждого её комплекта, по сравнению со стоимостью комплекта однодиапазонной аппаратуры, возрастёт незначительно. С учётом введения в
ближайшем будущем гражданских модулирующих кодов в GPS и Глонасс, распространение и применение двухчастотной аппаратуры потребителя станет повсеместным.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #